ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области пассивной когерентной локации и может быть использовано в пассивных когерентных локаторах (ПКЛ), предназначенных для обнаружения и оценки координат воздушных, надводных и наземных объектов, не содержащих активных источников радиоизлучения, по рассеянным этими объектами сигналам, например, сигналам цифрового эфирного телевидения (ЦЭТВ). ПКЛ содержит N-элементную цифровую антенную решетку (АР) для приема прямых и рассеянных объектами радиосигналов. Прямые сигналы (ПС) могут излучаются передатчиками ЦЭТВ.
УРОВЕНЬ ТЕХНИКИ
В основе принципа обнаружения и измерения координат объектов ПКЛ лежит совместная обработка радиосигнала, отраженного объектом, и опорного сигнала (ОС), формируемого на основе принимаемого прямого радиосигнала, излученного передатчиком. В устройстве цифровой обработки вычисляется взаимная функция неопределенности (ВФН) отраженного сигнала и ОС. Далее производится обнаружение объектов путем анализа ВФН.

где τ - задержка; fd - доплеровский сдвиг частоты; t - время; u(t) - радиосигнал в канале обнаружения объекта; ν(t) - опорный сигнал (ОС); * - символ комплексного сопряжения.
Качество радиолокационного обнаружения объектов - вероятность ложных тревог и вероятность правильного обнаружения объектов - во многом определяется качеством формирования ОС ν(t), т.е. минимизацией внесенных в него искажений.
В некоторых известных устройствах ПКЛ, например, патент США US 10485371A1, применяется отдельный аппаратный канал формирования ОС. Сигнал, излученный передатчиком, принимают на отдельную антенну, которую предварительно ориентируют в пространстве на основании априорных данных о местонахождении передатчика. Принятый таким образом сигнал принимают в качестве ОС для ПКЛ.
Однако, в зоне действия ПКЛ находится, как правило, не единственный передатчик ПС. Сигнал постороннего ПС также может быть принят в канале формирования ОС по боковому лепестку диаграммы направленности (ДН) антенны ОС, искажая таким образом ОС. Поэтому недостатком описанного способа является уязвимость ПКЛ к помехам от источников ПС, принятых по боковому лепестку ДН антенны ОС. Принятый помеховый сигнал искажает ОС, порождая дополнительные пики ВФН, которые, в свою очередь, порождают ложные пики обнаружения в каналах обнаружения объектов, результатом чего являются ложные обнаружения объектов и маскирование истинных объектов в ПКЛ. Еще одним недостатком такого решения является необходимость использования антенны канала ОС как отдельного устройства, причем эта отдельная антенна, как правило, уступает по размерам, а, следовательно, по характеристикам направленности основной антенне ПКЛ. Следствием этого является возможный повышенный уровень помеховых сигналов, принятых по боковым лепесткам, в антенне канала ОС, по сравнению с уровнем помеховых сигналов в основной антенне ПКЛ.
Известны способы борьбы с помеховым сигналом, принимаемым по боковому или заднебоковому лепестку ДН для систем с антеннами типа АР. В этих способах подавление помехового сигнала осуществляется путем формирования минимума ДН в заранее определенном направлении на источник помехи. Техническая реализация этого способа заключается в предварительном расчете и формировании специального фазового распределения (ФР) или амплитудно-фазового распределения (АФР) для АР.
Одним из примеров такого подхода может служить способ адаптивного подавления пространственных помех (патентная заявка РФ № 2012137999/08). В данном способе в зоне обзора ДH формируют массив контрольных угловых направлений, для каждого из которых определяют режекторное ФР поля в апертуре антенны, при котором обеспечивается формирование провала в этом направлении, определяют угловые направления, в которых необходимо подавить помехи, для чего последовательно устанавливают в антенной решетке для каждого контрольного углового направления соответствующее режекторное ФР и выявляют направления, в которых формирование режекторного ФР приводит к подавлению помехи.
Недостатком этого способа применительно к ПКЛ является сложность его реализации, требующей высокого качества фазовой или амплитудно-фазовой калибровки АР, как правило, недостижимого в реальных ПКЛ, а тем более, в ПКЛ, которые периодически меняют место размещения.
Наиболее близким решением, принятым за прототип, является способ пространственной локализации радиомолчащих объектов, описанный в патенте РФ № 2758585. Данный способ реализуется в устройстве ПКЛ, причем в отличие от устройства по патенту США № 10485371A1, канал формирования ОС создается не с помощью отдельной антенны, а с помощью формируемых приемных лучей ДН АР. При этом выбор луча ДН для формирования канала ОС так же производят на основании расчета по априорным данным о местонахождении выбранного передатчика ПС. Ансамбль принятых антеннами радиосигналов преобразуют в цифровые сигналы. Цифровые сигналы, соответствующие ПС, служат в данной системе ОС. Канал формирования ОС при этом соответствует одному формируемому каналу АР и каналу приемника.
В данном способе предусматриваются также меры борьбы с помехами, в т.ч. при приеме ПС. В данном способе предполагается, что в качестве ПС используются сигналы передатчиков радиоэлектронных систем различного назначения, поэтому помехи от них являются в общем случае некоррелированными. Такие помехи могут быть подавлены в ходе цифровой корреляционной обработки, как и показано в описанном способе.
Недостатком данного способа применительно к ПКЛ, работающим по сигналам одночастотных сетей, является то, что сигналы посторонних передатчиков единой одночастотной сети создают коррелированные помехи, которые невозможно подавить описанным способом.
Таким образом, возможное попадание помехового сигнала постороннего передатчика в боковой лепесток ДН луча, выбранного для формирования ОС, приводит к образованию помехи ОС, которую невозможно отфильтровать при последующей корреляционной обработке.
РАСКРЫТИЕ СУЩНОСТИ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Технической задачей, решаемой в данном изобретении, является формирование ОС при минимальных вычислительных затратах, в наибольшей степени свободного от помеховых искажений, обусловленных наличием посторонних излучающих передатчиков одночастотной сети.
Техническим результатом изобретения является повышение качества радиолокационного обнаружения объектов, достигаемое при минимальных затратах вычислительных ресурсов радиолокационной системы, а именно: снижение вероятности ложных тревог и повышение вероятности правильного обнаружения объектов в ПКЛ за счет минимизации искажений ОС, обусловленных приемом сигналов посторонних передатчиков сигнала одночастотной сети по боковым лепесткам ДН антенной решетки.
Поставленная техническая задача решается за счет формирования несколько (более одного) каналов приема прямого сигнала, которые соответствуют нескольким соседним лучам антенной решетки в пределах одного элемента разрешения антенной решетки по углу. В каждом канале приема прямого сигнала вычисляют автокорреляционную функцию сигнала, находят значение первого (главного) и второго максимумов автокорреляционной функции. Затем вычисляют отношение значений второго максимума к первому, сравнивают значения отношения для разных каналов приема и выбирают минимум. Находят номер канала приема, который соответствует найденному минимуму. А сигнал, принятый по каналу с данным номером, используют в качестве опорного сигнала локатора.
Т.е. техническая задача решается за счет выявления различий характеристик сигнала, принятого в нескольких соседних лучах ДН и сформированных на прием в пределах одного элемента разрешения АР по углу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предлагаемый способ проиллюстрирован следующими рисунками:
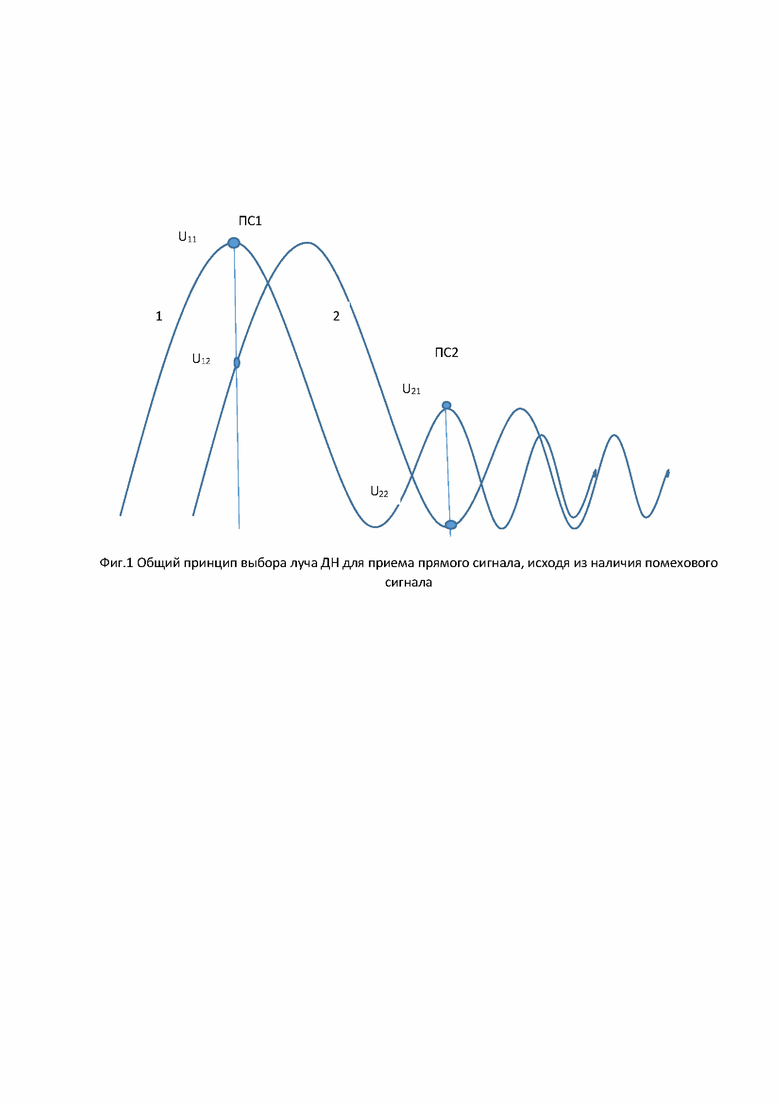
Фиг. 1 - общий принцип выбора луча ДН для приема прямого сигнала, исходя из наличия помехового сигнала, где
1 - луч ДН с максимальным уровнем прямого сигнала U11 от источника ПС1 и уровнем помехи U21 от источника ПС2;
2 - луч ДН с отличным от максимального уровнем прямого сигнала U12 от источника ПС1 и минимальным уровнем помехи U22 от источника ПС2;
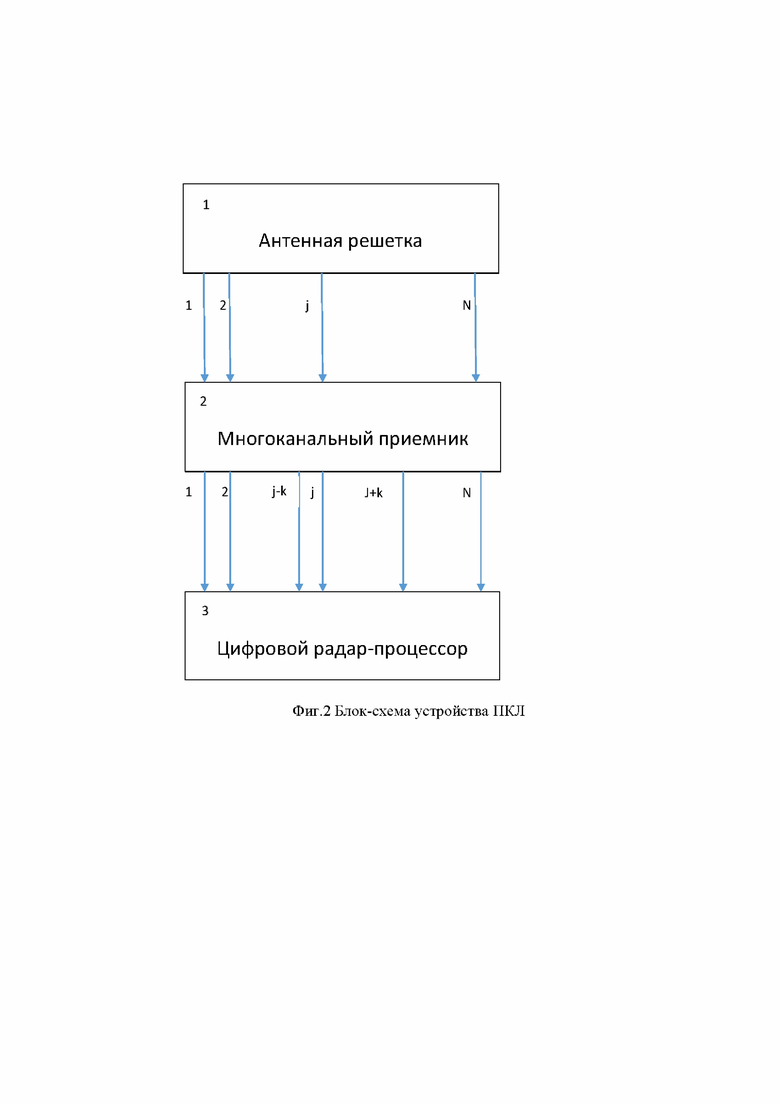
Фиг. 2 - блок-схема устройства ПКЛ, в котором реализуется способ, где
1 - антенная решетка из N элементов;
2 - многоканальный приемник;
3 - цифровой радар-процессор.
Фиг. 3 - блок-схема алгоритма обработки сигнала в радар-процессоре, реализующего предлагаемый способ, где
4 - блок вычисления АКФ или иной функции самоподобия сигнала;
5 - блок поиска 1-го максимума АMAX1;
6 - блок поиска 2-го максимума АMAX2;
7 - блок вычисления отношения S=АMAX2/АMAX1;
8 - блок поиска минимума отношения S
9 - блок выбора номера канала приема для формирования опорного сигнала.
ПС передатчика имеет высокую мощность, поэтому уровень сигнала позволяет обнаруживать ПС при приеме не только вблизи максимума ДН, но даже и на скатах ДН. В то же время, угловая ширина бокового лепестка (БЛ), т.е. угловое расстояние между соседними минимумами ДН, всегда меньше (в пределе - в два раза) ширины основного лепестка ДН. Таким образом, смещая положение ДН по углу, можно сохранить направление на выбранный передатчик в пределах основного лепестка ДН, добившись смещения помехового сигнала в область минимума ДН. Это проиллюстрировано на Фиг.1. На ДН 1 прямой сигнал ПС1 находится вблизи максимума, однако, и прямой сигнал ПС2, представляющий помеху для приема ПС1, оказывается вблизи максимума бокового лепестка ДН1. На ДН2 ПС1 смещен относительно максимума в область ската основного лепестка ДН2, но при этом ПС2 оказывается смещенным в область минимума ДН2. В результате отношение уровня помехи к уровню основного сигнала U21/U11 при приеме по ДН1 оказывается выше, чем отношение U12/U22 при приеме по ДН2.
Помеховый сигнал проявляется в ходе цифровой обработки в виде ложных пиков на ВФН принятого сигнала. Наибольшее влияние на появление ложных обнаружений оказывает наибольший ложный пик, вызванный, как правило, приемом помехового сигнала от другого передатчика по боковому лепестку ДН.
Способ реализуется в ПКЛ, которые имеют в своем составе (Фиг.2):
антенную решетку, состоящую из N элементов (блок 1);
многоканальный приемник (блок 2);
устройство цифровой обработки (цифровой радар-процессор) (блок 3).
ПКЛ осуществляет цифровое сканирование по углу за счет цифрового формирования множества лучей приемной ДН, для каждого из которых задано свое фазовое распределение. При этом внутри одного элемента разрешения АР по углу формируют несколько лучей.
По априорно известным координатам передатчика вычисляют угол (пеленг) на передатчик. По вычисленному значению угла выбирают соответствующий номер j луча ДН, который предварительно будет соответствовать каналу приема прямого сигнала передатчика.
С целью окончательного выбора канала приема прямого сигнала с учетом наилучших условий радиоприема далее производят следующую обработку принятого сигнала), которая проиллюстрирована блок-схемой устройства обработки (Фиг.3).
В окрестности выбранного луча с номером j и в пределах ширины ДН дополнительно выбирают 2k соседних лучей и, соответственно, выбирают 2k дополнительных приемных каналов, в которых обрабатываются принятые сигналы Ui.
Для принятого в каждом из выбранных каналов сигнала Ui, образующего вектор-строку для данного направления, производят вычисление автокорреляционной функции (АКФ) сигнала Аi (блок 4).
Для каждой вычисленной АКФ Аi находят значение первого (главного) максимума Аimax1 (блок 5) и второго максимума Аimax2 (блок 6) и вычисляют отношение второго максимума к первому Аimax2/ Аimax1 (блок 7).
Находят минимальное значение отношения mini (Аimax2/ Аimax1) и соответствующий этому минимуму номер канала приема i (блок 8).
По номеру луча i, соответствующему минимальному значению отношения, выбирают рабочий канал приема для формирования ОС (блок 9).
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОСТАНЦИОННАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА ПАССИВНОЙ ЛОКАЦИИ (ПРОМЫШЛЕННОГО ВИДЕНИЯ) | 2012 |
|
RU2517234C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ МНОГОКАНАЛЬНАЯ РАДИОЭЛЕКТРОННАЯ СИСТЕМА | 1996 |
|
RU2160452C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524401C1 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2723432C2 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
| Способ обработки сигналов в модульной адаптивной антенной решетке при приеме коррелированных сигналов и помех | 2015 |
|
RU2609792C1 |
| СПОСОБ СЛОЖНОСОСТАВНОЙ ОПТИМАЛЬНОЙ ФИЛЬТРАЦИИ ДЛЯ ОБНАРУЖЕНИЯ СЛАБЫХ СИГНАЛОВ | 2012 |
|
RU2518443C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМПЕНСАЦИОННОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ В ПЛОСКОЙ АНТЕННОЙ РЕШЕТКЕ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ ЛУЧОМ | 2023 |
|
RU2810696C1 |
| САМОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2037845C1 |

Изобретение относится к области пассивной когерентной локации и может быть использовано в пассивных когерентных локаторах (ПКЛ), предназначенных для обнаружения и оценки координат воздушных, надводных и наземных объектов, не содержащих активных источников радиоизлучения, по рассеянным этими объектами сигналам одночастотных сетей, например по сигналам цифрового эфирного телевидения (ЦЭТВ). Технический результат заключается в повышении качества радиолокационного обнаружения объектов, достигаемого при минимальных затратах вычислительных ресурсов ПКЛ, а именно: снижении вероятности ложных тревог и повышении вероятности правильного обнаружения объектов в ПКЛ за счет минимизации мощности принимаемых помеховых сигналов в канале опорного сигнала (ОС). Для осуществления заявленного способа ПКЛ содержит N-элементную цифровую антенную решетку для приема прямых и рассеянных объектами радиосигналов. В основе принципа обнаружения и измерения координат объектов ПКЛ лежит совместная обработка радиосигнала, отраженного объектом, принимаемого в канале обнаружения, и опорного сигнала, формируемого на основе принимаемого прямого радиосигнала, излученного передатчиком. В устройстве цифровой обработки вычисляется взаимная функция неопределенности (ВФН) сигнала канала обнаружения и ОС, путем анализа которой производится обнаружение объектов. Качество радиолокационного обнаружения объектов во многом определяется качеством формирования ОС. В данном изобретении предлагается способ формирования ОС, обеспечивающий минимизацию влияния внешних помеховых сигналов на формирование ОС при приемлемых вычислительных затратах. 3 ил.
Способ пространственной локализации радиомолчащих объектов, заключающийся в том, что принимают антенной решеткой прямые и рассеянные объектами радиосигналы широкополосных передатчиков радиоэлектронных систем различного назначения, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, цифровые сигналы преобразуют в прямой и рассеянные сигналы для выбранных азимутально-угломестных направлений приема, из которых для каждого выбранного направления приема формируют очищенный от прямого и рассеянных стационарными объектами сигналов рассеянный сигнал, а очищенные сигналы совместно со значением азимутально-угломестного направления приема и значением прямого сигнала запоминают, отличающийся тем, что формируют несколько (более одного) каналов приема прямого сигнала, соответствующих нескольким соседним лучам антенной решетки в пределах одного элемента разрешения антенной решетки по углу, в каждом канале приема прямого сигнала вычисляют автокорреляционную функцию сигнала, находят значение первого (главного) и второго максимумов автокорреляционной функции, вычисляют отношение значений второго максимума к первому, сравнивают значения отношения для разных каналов приема и выбирают минимум, находят номер канала приема, соответствующий найденному минимуму, а сигнал, принятый по каналу с данным номером, используют в качестве опорного сигнала локатора.
| Способ пространственной локализации радиомолчащих объектов | 2020 |
|
RU2758585C1 |
| СПОСОБ АДАПТИВНОГО ПОДАВЛЕНИЯ ПРОСТРАНСТВЕННЫХ ПОМЕХ | 2012 |
|
RU2488928C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
| СПОСОБ ПАССИВНОГО РАДИОМОНИТОРИНГА ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2440588C1 |
| СПОСОБ СКРЫТНОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2724923C2 |
| CN 106597409 A, 26.04.2017 | |||
| WO 2020146995 A1, 23.07.2020 | |||
| US 2010085243 A1, 08.04.2010. | |||

