Группа изобретений относится к области судовождения, а конкретно к способам и системам контроля местоположения судна, основанным на нечеткой логике, и может быть использована для повышения безопасности плавания в стесненных условиях навигации.
В настоящее время существует важная задача постоянного контроля местоположения судна. Вместе с тем, что современные приборы навигационного мостика обладают, очевидно, достаточно хорошими параметрами работы, такими как надежность, целостность, точность, комплексирование отдельных показаний представляет собой первостепенную задачу. При этом важен контроль правильности предварительной и исполнительной прокладок.
Известен способ по патенту РФ на полезную модель №107124 «Информационно-управляющий комплекс для автоматизации судовождения и динамического позиционирования судна», опубликован 10.08.2011 г.автоматического управления движением судном динамического позиционирования судна. Его сущность заключается в максимальной синергии совокупного применения аппаратуры ряда различных средств координирования судна, полноты измерений внешних возмущающих воздействий и использования в качестве объектов управления всех без исключения движительных судовых систем и устройств. Технический результат достигается следующим образом: информационно-управляющий комплекс для автоматизации судовождения и динамического позиционирования судна содержит блок измерителей параметров движения судна, блок датчиков внешних воздействий, блок объектов управления, информационные выходы которых подключены к вычислительному блоку, а также блок управления, связанный информационно-управляющим входом-выходом с вычислительным блоком, причем он включает блок судовых навигационных приборов в составе эхолота, лага и гирокомпаса, навигационную радиолокационную станцию и навигационный модуль в виде приемоиндикатора спутниковой навигационной системы, блок датчиков внешних воздействий включает датчики параметров ветра и волнения, блок объекта управления включает объекты управления в виде судовых движителей и рулевого устройства с подключенными к ним датчиками, вычислительный блок включает контроллер, блок и центральный процессор, при этом к входам контроллера подключены информационные выходы других блоков, а выходы контроллера и блока программного обеспечения подключены к входам центрального процессора, который выполнен с возможностью сравнения данных измерений текущих параметров движения судна с заданными программными значениями и формирования по результатам этого сравнения управляющих сигналов на объект управления.
Недостатками данного способа являются:
Отсутствие возможности комплексно оценивать безопасность маршрута, равно как и безопасность в текущей навигационной обстановке, так как упомянутый способ не предусматривает измерение этих параметров
Нет четкого указания механизма фильтрации и комплексования данных от различных источников, что может породить целый ряд проблем, в частности, проблемы сочетания навигационных параметров разной природы.
Известен способ по патенту РФ №2207296 «Способ автоматической проводки судна», опубликован 13.10.2000 г.автоматического управления движением судна. Суть изобретения состоит в том, что в способе автоматической проводки судна, включающем измерение параметров движения судна от датчиков угла курса и угловой скорости, от датчика положения руля и навигационного прибора, определяющего текущее положение судна, их последующее сравнение с программными значениями данных параметров движения и формирование управляющего сигнала на рулевой привод в функции данных рассогласования и скорости судна, определяемой навигационным прибором, программные параметры движения, определяющие положение судна, получают путем обработки сигналов о положении судна от навигационного прибора при эталонном проходе судна по заданному маршруту, при этом выделяют участки судового хода, которые в зависимости от ширины участка судового хода аппроксимируют прямыми линиями, для которых программные значения угла курса постоянные, и криволинейные участки, соединяющие прямолинейные, которые аппроксимируют дугами круга радиуса разворота и переходными участками, при этом программные значения угла курса, угловой скорости, положения руля определяют в соответствии с упрощенной моделью движения судна в функции радиуса разворота, текущей скорости и времени.
Недостатками данного способа являются:
Отсутствие возможности комплексно оценивать безопасность маршрута, равно как и безопасность в текущей навигационной обстановке, так как упомянутый способ не предусматривает измерение этих параметров.
Нет четкого указания механизма фильтрации и комплексования данных от различных источников, что может породить целый ряд проблем, в частности, проблемы сочетания навигационных параметров разной природы.
В качестве прототипа для предлагаемой группы изобретений взят патент РФ №2519315, опубликованный 10.06.2014 г.«Способ автоматического управления судном по курсу и интеллектуальная система для осуществления способа».
Группа изобретений прототипа относится к способу автоматического управления судном по курсу и интеллектуальной системе автоматического управления судном по курсу. Способ заключается в том, что в качестве модели объекта управления используют нейросетевую модель объекта управления. Для настройки настраиваемых параметров алгоритма нечеткой логики получают и идентифицируют данные движения судна по курсу и данные управляющих воздействий, определяют данные критериальных признаков движения судна по идентифицированным данным движения судна по курсу и данным управляющих воздействий с использованием базы знаний поведения судна по курсу, выбирают нейросетевую модель объекта управления на базе определенных данных критериальных признаков движения судна, определяют данные настраиваемых параметров алгоритма нечеткой логики в соответствии с выбранной нейросетевой моделью объекта управления. Интеллектуальная система содержит регулятор на нечеткой логике, эмулятор для корректировки управляющего воздействия, прямые и обратные связи между объектом управления, регулятором на нечеткой логике и эмулятором. Эмулятор выполнен в виде нейросетевого эмулятора. Нейросетевой эмулятор включает нейросетевой классификатор, блок нейросетевой модели объекта управления и блок оптимизации. Нейросетевой классификатор содержит базу знаний поведения судна по курсу. Технический результат заключается в обеспечении высокого быстродействия процессов управления и эффективной фильтрации случайных возмущений системы.
Недостатками прототипа являются:
Отсутствие возможности комплексно оценивать безопасность маршрута, равно как и безопасность в текущей навигационной обстановке, так как упомянутый способ не предусматривает измерение этих параметров.
Нет четкого указания механизма фильтрации и комплексования данных от различных источников, что может породить целый ряд проблем, в частности, проблемы сочетания навигационных параметров разной природы.
Технической задачей предлагаемого способа и системы контроля местоположения судна является повышение безопасности плавания судов при прохождении узкостей, фарватеров и других участков водных путей.
Для решения поставленной задачи предлагается способ контроля местоположения судна, включающий получение навигационных параметров, ОТЛИЧАЮЩИЙСЯ тем, что используют нечеткую логику, для чего создают матрицу, каждой ячейке которой присваивают координаты Х и У, после чего ее подвергают нечеткой кластеризации для выделения участков с повышенной опасностью из-за близости к навигационным опасностям, определяют местоположение судна путем совокупного учета навигационной информации от различных источников с помощью нечетких чисел, определяют координаты ячеек, через которые проходят линии предварительной прокладки, выходные данные вводят в блок для проверки линий предварительной прокладки в кластеризованной среде, получают оценку опасности в текущий момент и величину опасности в графическом виде при следовании по маршруту.
Для решения поставленной задачи предлагается система контроля местоположения судна, включающая блоки входной и выходной навигационной информации, блоки обработки информации, ОТЛИЧАЮЩАЯСЯ тем, что система содержит матрицу с ячейками, обозначенными координатами Х и У, содержащими значения навигационной безопасности, получаемые нечеткой кластеризацией, блок генерации линий предварительной прокладки в кластеризованной среде, блок проверки генеральных линий предварительной прокладки на наличие опасностей, блоки нахождения координат Х и У.
Технический результат заключается в возможности комплексно оценивать безопасность маршрута, равно как и безопасность в текущей навигационной обстановке и комплексно оценивать данные от различных источников, что может существенно повысить безопасность проводки судна, а также явиться базой для юридического описания процесса принятия решения о следовании по маршруту.
Технический результат достигается вследствие логических преобразований, происходящий в ячейках матриц, в которых навигационные параметры учитываются в виде степени принадлежности конкретной ячейки к функции принадлежности навигационного параметра.
Сущность предлагаемой группы изобретений заключается в следующем.
В случае навигационных опасностей, например в проливе, на подходе к порту, в узкостях и т.п., активизируется механизм генерации матрицы и дальнейшего функционирования алгоритма. Сгенерированные линии предварительной прокладки получают оценку опасности следования, а судоводитель также получает оценку опасности текущего состояния судна, в соответствии с которым может принять решение о дальнейших действиях на более высоком уровне для осуществления операции используется система, включающая блоки входной и выходной навигационной информации, блоки обработки информации, блок генерации линий предварительной прокладки в кластеризованной среде, блок проверки генеральных линий предварительной прокладки на наличие опасностей, блоки нахождения координат Х и У.
В предлагаемом способе указанные в аналогах и прототипе недостатки устраняются. Преимущество данного способа контроля местоположения судна заключается в том, что он позволяет оценить текущий уровень безопасности при следовании по маршруту. При этом легко учесть все данные навигационных приборов. Более того, данный подход позволяет сделать вывод о целесообразности захода в порт в текущей навигационной обстановке, базируясь на численных данных, что в свою очередь может явиться впоследствии важным юридическим инструментом.
Изобретение поясняется следующими чертежами.
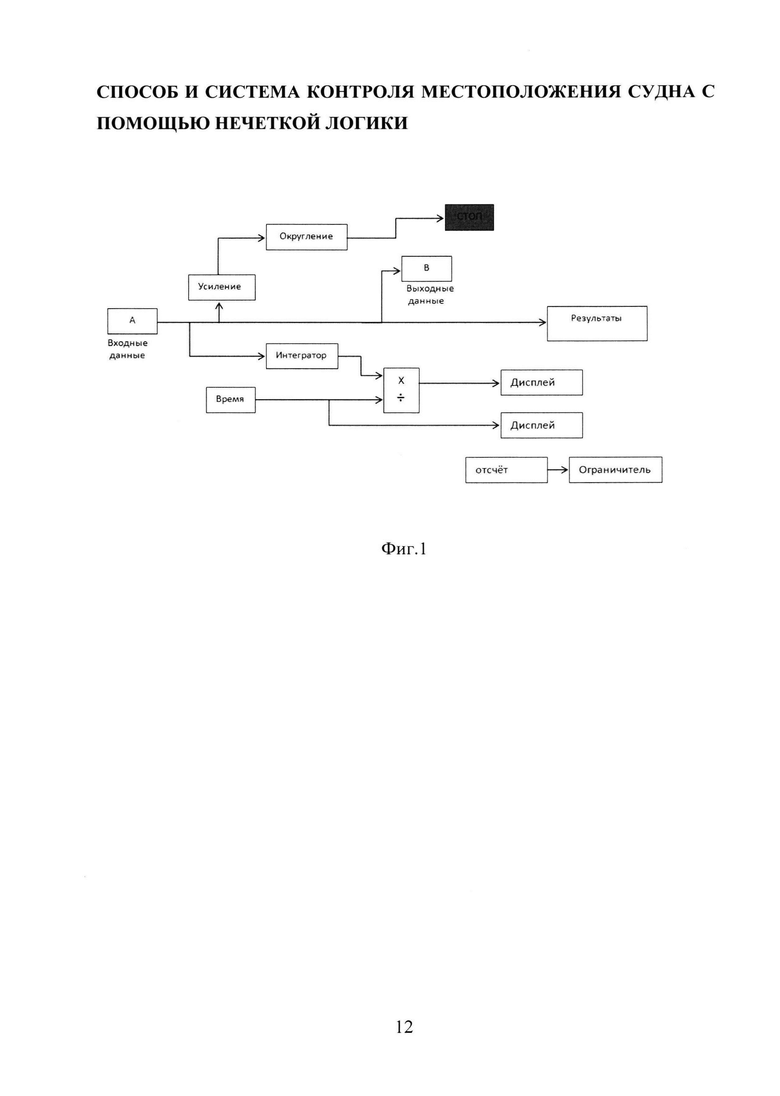
Фиг.1 Блок проверки генеральных линий предварительной прокладки на наличие опасностей.
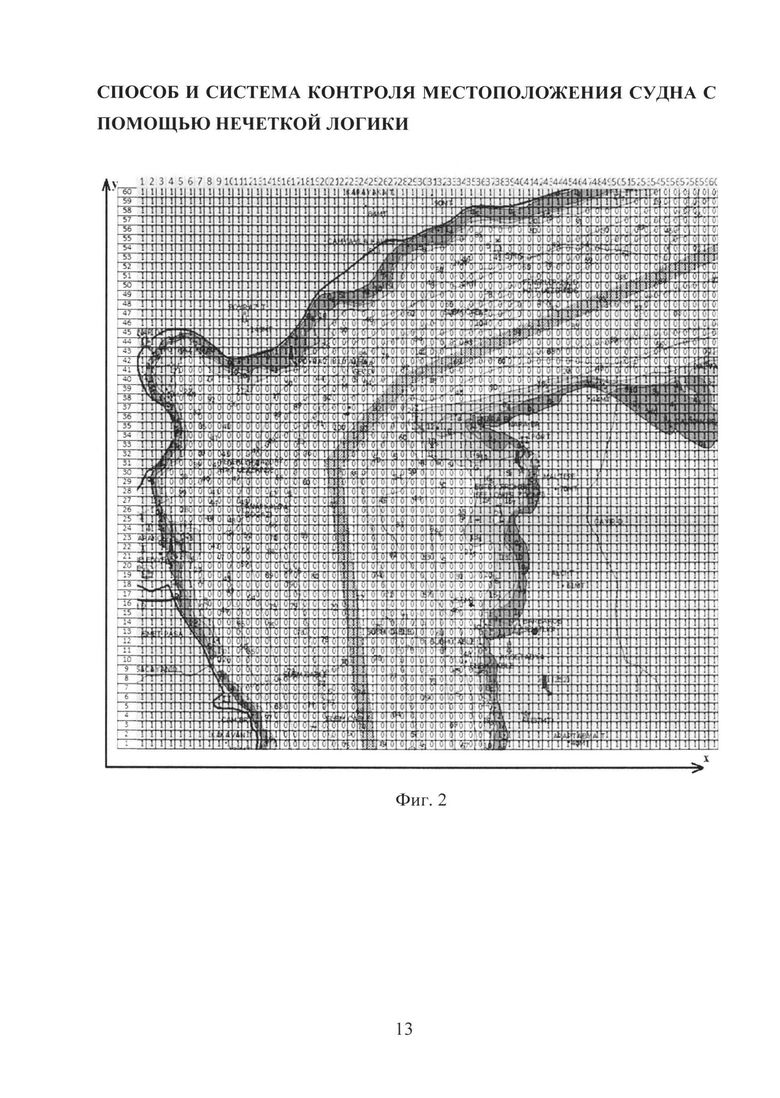
Фиг.2 Матрица значений;
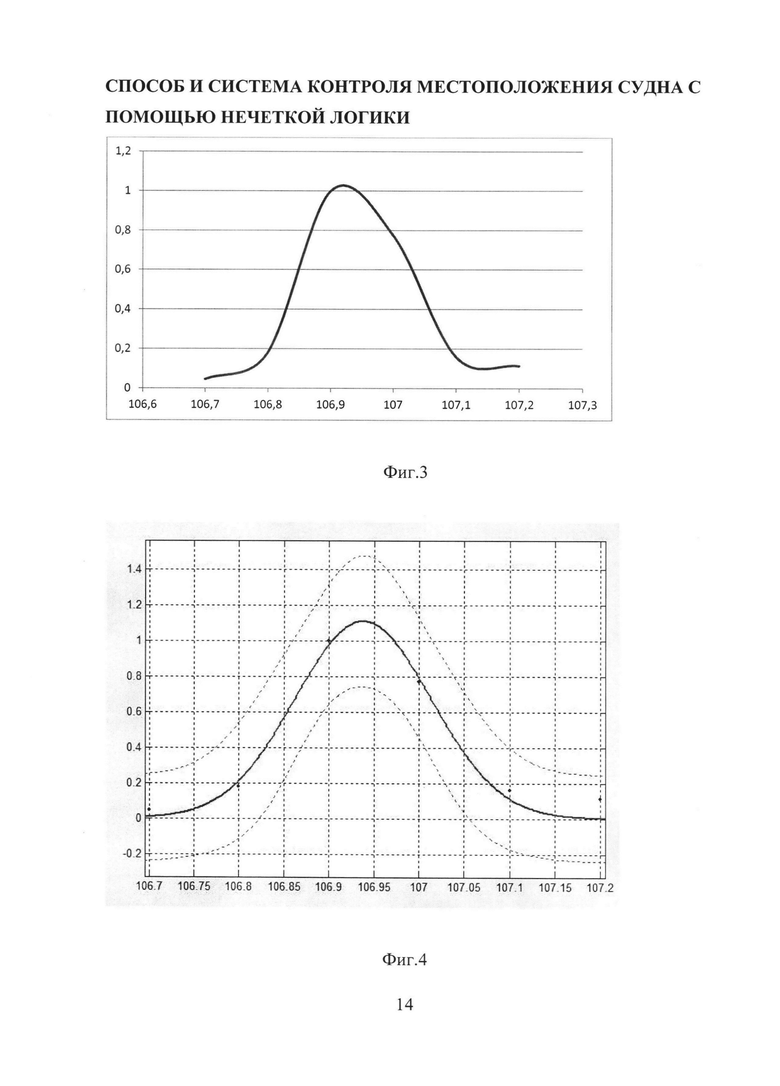
Фиг.3 Дискретная функция;
Фиг.4 Непрерывная функция;
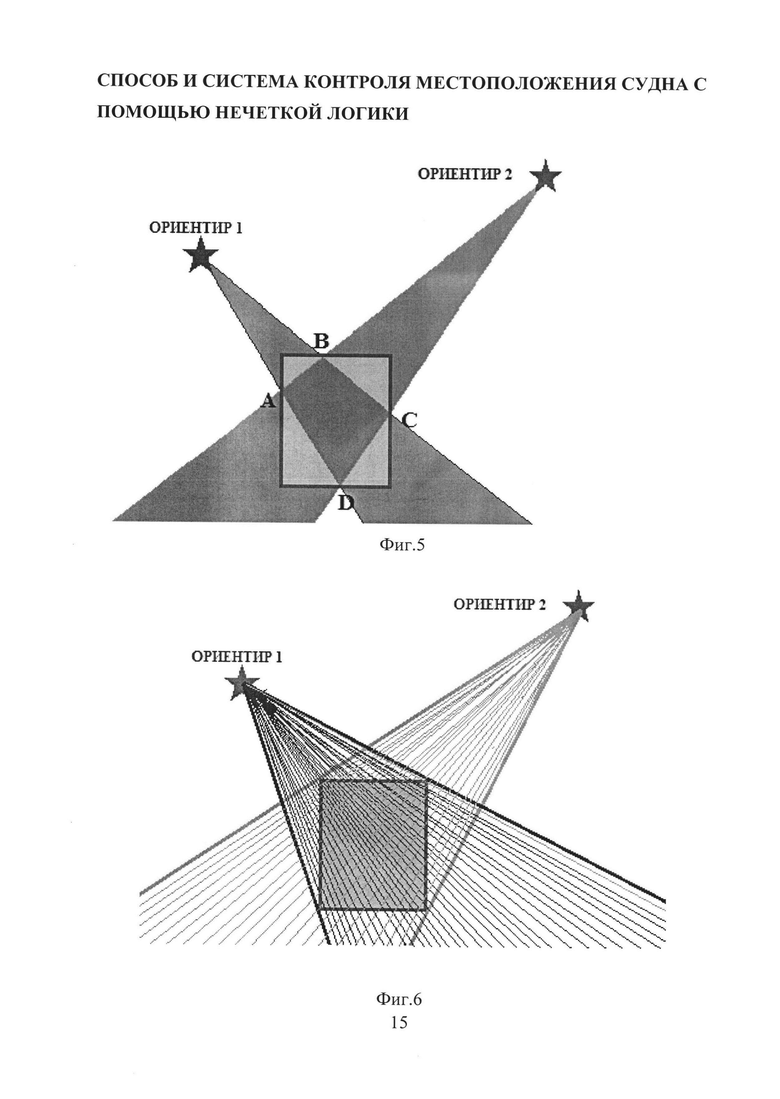
Фиг.5 Фигура погрешностей;
Фиг.6 Координаты точек пересечения и их степени принадлежности;
Фиг.7 Фигура принадлежности места судна;
Фиг.8 Блок генерации линий предварительной прокладки в кластеризованной среде;
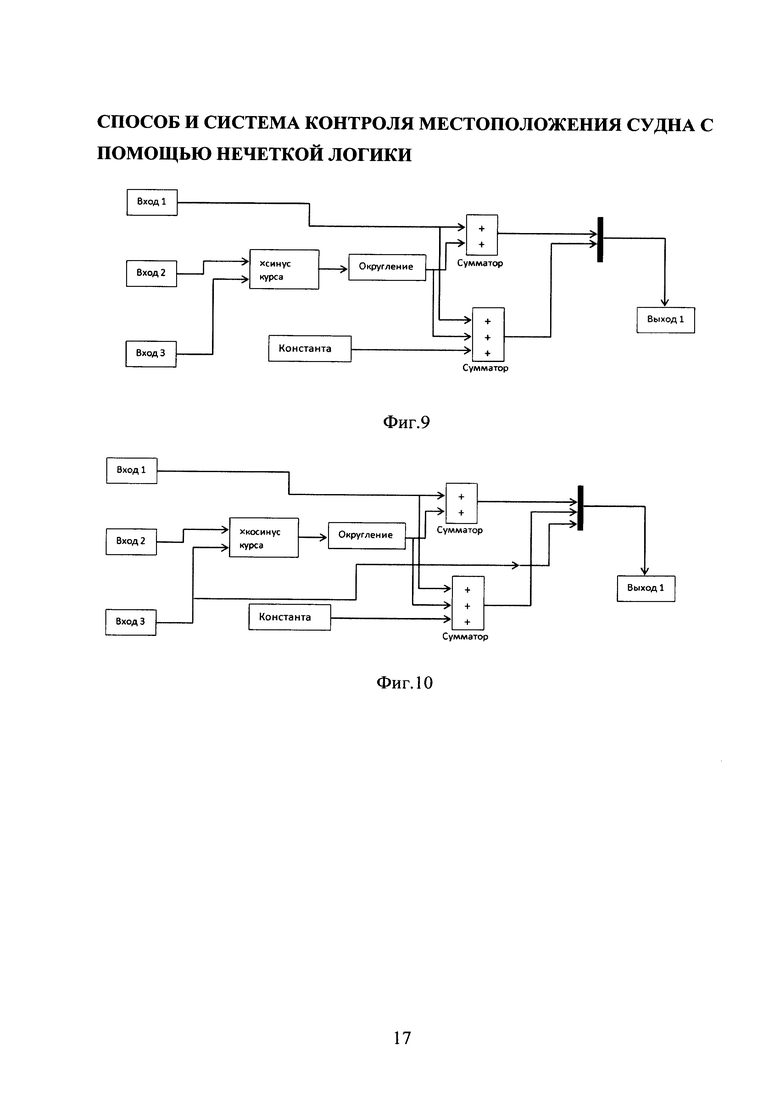
Фиг.9 Подсистема отвечающая за нахождение координаты ячейки матрицы по оси x;
Фиг.10 Подсистема отвечающая за нахождение координаты ячейки матрицы по оси y;
Предложенный способ контроля местоположения судна с помощью нечеткой логики реализуется следующим образом.
Общая схема представлена на фиг.1. На ней показана взаимосвязь блоков системы, включая подсистему счетчика, который останавливается при попадании в недопустимые значения параметров безопасности следования по маршруту.
В качестве входных данных выбирают сложный в навигационном плане участок, на основе которого создается матрица фиг 2. Каждой ячейке в матрице присваиваются координаты X и Y. Значению «X» соответствуют координаты ячейки по горизонтали, а «Y» – по вертикали. В матрице «1» является навигационной опасностью, а «0» – участком, где возможен безопасный проход судна. После оцифровки данный информационный слой подвергается кластеризации с целью выделения участков с повышенной опасностью из-за близости к навигационным опасностям. Мерой расстояния выбрана мера Манхеттена в виду особенностей представления данных.
Для того чтобы понять сколько ячеек матрицы занимает площадь фигуры погрешности определения места судна (ОМС), определяется местоположение судна и оценивается точность полученных координат с помощью способа, основанного на нечеткой логике.
Сущность предлагаемого способа определения местоположения судна заключается в соотнесении координатам степени принадлежности, получаемой при обработке различных линий положения. Обработка серии измерений производится с помощью теории нечетких чисел. Из n измерений определяется степень принадлежности значений навигационного параметра по методам, указанным в [4]. Имеется серия измерений на ориентир 1. Обработка данных представлена в виде таблицы:
Таблица. Обработка измерений по ориентиру 1
В первом столбце указаны значения навигационного параметра. Далее количество измерений в группе (ni) делится на общее число измерений (N). Полученные во втором столбце результаты нормируются, то есть делятся на максимальное значение. Для наглядности строится график в соответствии с данными третьего столбца. Полученные значения представлены на фиг.3.
Аналогично обрабатываются измерения по ориентиру 2.
Дискретные значения затем интерполяционно сглаживаются. Применяется интерполяция гауссианами второй степени. Выводится формула (1), описывающая непрерывную функцию.
F(x)=a1*exp(-((x-b1)/c1)^2) (1)
Полученная непрерывная функция представлена на фиг.4 применительно к ориентиру 1.
Соответствующие действия производятся и для ориентира 2.
Для построения поверхности нахождения судна соответствующие степени принадлежностей наносятся в каждую ячейку. Для ОМС по пеленгу получаем следующую последовательность: определяются координаты точек пересечения крайних значений пеленгов. Полученная фигура погрешностей заключается в условный прямоугольник, границы которого известны (см. фиг.5).
В пределах полученного прямоугольника проводятся значения измерений на ориентир 1 и соответственно на ориентир 2. Находятся координаты всех точек пересечений с помощью тригонометрических функций (см. фиг.6). С помощью формулы (1), описывающей непрерывную функцию, для каждой ячейки находятся значения пеленгов центра на ориентир 1 и 2. Данным значениям присваивается соответствующая степень принадлежности. Значениям пеленгов, выходящих за рамки фигуры погрешностей вписанной в прямоугольник, присваиваются степень принадлежности 0. Определяются индивидуальные степени принадлежности каждого пеленга, которые находятся в диапазоне [0, 1].
В конечном итоге в вышеупомянутой фигуре погрешностей выделяются области, заданные координатами с одинаковыми степенями принадлежности, которые дают наглядную оценку местоположения судна. Полученные области представлены на фиг.7.
Необходимо заметить, что фигура погрешности ОМС по способу указанному выше занимает площадь в 6 раз меньшую, чем площадь одной ячейки матрицы, что в свою очередь позволяет проверять генеральные линии предварительной прокладки на наличие опасностей без использования различных норм, мер или правил объединения ячеек.
Блок генерации линий предварительной прокладки, изображенный на фиг.8, позволяет определять координаты ячеек через которые проходят линии предварительной прокладки в кластеризованной среде, он состоит из нескольких подсистем представленных на фиг.9 и 10. Первая подсистема отвечает за нахождение координаты ячейки матрицы по оси x, вторая подсистема – по оси y. Для начала работы необходимо ввести координаты ячейки матрицы с которой начнется отсчет и значение курса в градусах. После того, как данные введены в соответствующие блоки, происходит обработка, и в конечном итоге получаются координаты всех ячеек матрицы, через которые проходит генеральная линия предварительной прокладки в виде таблицы. Далее, на основании полученных данных, линии проверяются на наличие опасностей с помощью блока представленного на фиг.1. Если обнаруживается опасность в одной из ячеек, через которую проходит линия, то происходит остановка процесса проверки и загорается блок «Stop simulation». Результаты моделирования показывают как величину опасности в текущий момент, так и график опасности сопряженный со следованием по данному курсу. Способ является крайне быстрым в вычислениях и достаточно простым.
Источники информации
1. Патент РФ №107124 «Информационно-управляющий комплекс для автоматизации судовождения и динамического позиционирования судна»
2. Патент РФ №2207296 «Способ автоматической проводки судна».
3. Патент РФ №2519315 «Способ автоматического управления судном по курсу и интеллектуальная система для осуществления способа» (прототип)
4. Л. Рутковский. Методы и технологии искусственного интеллекта/пер. с польск. И.Д. Рудинского. – М.: Горячая линия–Телеком, 2010.- 520 с., ил.
Способ и система контроля местоположения судна с помощью нечеткой логики
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГЕНЕРАЦИИ ПРЕДВАРИТЕЛЬНОЙ ПРОКЛАДКИ СУДНА | 2020 |
|
RU2735163C1 |
| Способ генерации предварительной прокладки пути судна и устройство для его реализации | 2021 |
|
RU2782617C1 |
| Способ оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда, и устройство для оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда | 2023 |
|
RU2809391C1 |
| Способ натурных испытаний безэкипажных судов | 2022 |
|
RU2797701C1 |
| Автоматизированная система сбора и распространения цифровой картографической информации водных путей | 2024 |
|
RU2833209C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ ПО КУРСУ И ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2519315C2 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |

Контроль местоположения судна включает получение навигационных параметров, поступающих в блок входной информации, а затем в блок обработки информации, при этом используют нечеткую логику: в созданной матрице каждой ячейке присваивают координаты Х и У, после чего ее подвергают нечеткой кластеризации для выделения участков с повышенной опасностью. Местоположение судна определяют путем совокупного учета навигационной информации от различных источников с помощью нечетких чисел, равно как и степень опасности следования судна по линиям, полученным в блоке генерации линий предварительной прокладки в кластеризованной среде. В блоках нахождения координат Х и У определяют координаты ячеек, через которые проходят линии предварительной прокладки. Выходные данные вводят в блок для проверки линий предварительной прокладки в кластеризованной среде, получают оценку опасности в текущий момент и величину опасности в графическом виде при следовании по маршруту. Возможно комплексно оценивать безопасность маршрута, безопасность в текущей навигационной обстановке и комплексно оценивать данные от различных источников. Существенно повышается безопасность проводки судна. 2 н.п. ф-лы, 10 ил., 1 табл.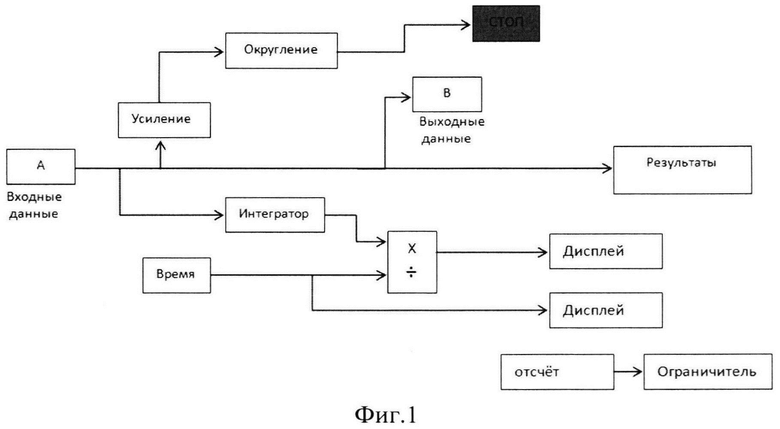
1. Способ контроля местоположения судна, включающий получение навигационных параметров, ОТЛИЧАЮЩИЙСЯ тем, что используют нечеткую логику, для чего создают матрицу, каждой ячейке которой присваивают координаты X и У, после чего ее подвергают нечеткой кластеризации для выделения участков с повышенной опасностью из-за близости к навигационным опасностям, определяют местоположение судна путем совокупного учета навигационной информации от различных источников с помощью нечетких чисел, определяют координаты ячеек, через которые проходят линии предварительной прокладки, выходные данные вводят в блок для проверки линий предварительной прокладки в кластеризованной среде, получают оценку опасности в текущий момент и величину опасности в графическом виде при следовании по маршруту.
2. Система контроля местоположения судна, включающая блоки входной и выходной навигационной информации, блоки обработки информации, ОТЛИЧАЮЩАЯСЯ тем, что система содержит матрицу с ячейками, обозначенными координатами X и У, содержащими значения навигационной безопасности, получаемые нечеткой кластеризацией, блок генерации линий предварительной прокладки в кластеризованной среде, блок проверки генеральных линий предварительной прокладки на наличие опасностей, блоки нахождения координат X и У.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ ПО КУРСУ И ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2519315C2 |
| Способ нанесения рисунка на поверхность мягких кожтоваров | 1956 |
|
SU107124A1 |
| 2000 |
|
RU2207296C |

