Изобретение относится к способам контроля и организации управления, в частности бортовых систем обеспечения безопасности мореплавания судов и технических средств освоения океана, а также прогнозирования динамики судна в сложных условиях эксплуатации.
Известен патент №2334262 «Способ контроля и управления состоянием неопределенности системы», основанный на анализе и целенаправленном изменении величины комплексного энтропийного потенциала LΔ параметра системы, состоящий в определении базового значения параметра системы и расчете величины комплексного энтропийного потенциала LΔ в соответствии с зависимостью LΔ=(σKЭ)/XП и определении ее изменения после каждого этапа эволюции или управления системой, по величине LΔ приращения или дифференциала комплексного энтропийного потенциала управляют состоянием неопределенности системы путем изменения настроек базового значения, задающих диапазон изменения параметра или его предельного значения, или величину его математического ожидания, или величину установки регулятора, или его номинальное значение, или базовую величину энтропийного потенциала, где σ - величина среднеквадратического отклонения параметра системы; KЭ - энтропийный коэффициент, величина которого определяется законом распределения параметра; XП - базовое значение, относительно которого рассматривается состояние неопределенности.
Недостатком этого способа является высокая степень погрешности при оценке изменений величин σ и KЭ контролируемого параметра в условиях большой неопределенности взаимодействия судна с внешней средой, а также низкая степень надежности контроля базового значения XП в экстремальных ситуациях при воздействии значительных ветроволновых возмущений и возникновении нештатного режима работы системы контроля.
Техническим результатом предлагаемого способа является уменьшение величины погрешности и повышение степени надежности функционирования бортовых систем для обеспечения безопасности мореплавания судов при возникновении экстремальных ситуаций, связанных с необходимостью предотвращения выхода контролируемого параметра за принятое ограничение.
Для достижения технического результата предлагается использовать способ, базирующийся на принципе конкуренции при выборе предпочтительной вычислительной технологии управления бортовыми системами в условиях большой неопределенности при возникновении экстремальных ситуаций и для его осуществления необходимое оборудование рабочего места оператора, которое включает оснащение графическим экраном, связанным интерфейсами с бортовой ЭВМ, процессором нечеткой логики и нейрокомпьютером, с помощью которых обеспечивается функционирование интеллектуальной системы, реализующей обработку измерительной информации и процедуры адаптивного управления в логическом блоке на основе самоорганизующейся нейронной сети.
Для обучения нейронных сетей на основе нейрокомпьютера используется информация, полученная от датчиков блока измерения в реальных условиях эксплуатации судна. В процессе обучения осуществляется настройка весов синоптических (межнейронных) связей.
Таким образом, предлагаемый способ, вместе с реализующими его устройствами, обеспечивает создание интеллектуальной среды контроля экстремальных ситуаций в условиях неопределенности среды, включающей в себя функциональные блоки в виде совокупности управляющих элементов на основе бортовой ЭВМ, процессора нечеткой логики и нейрокомпьютера.
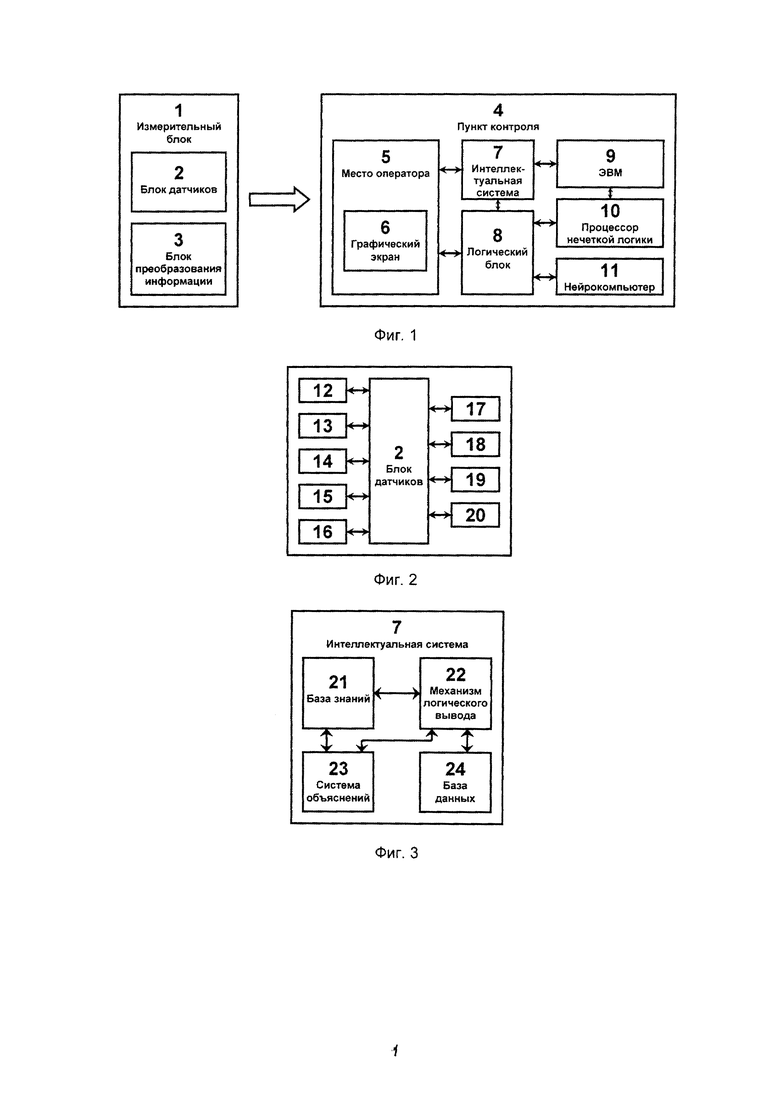
На фиг. 1 представлена блок-схема устройства, реализующего способ контроля экстремальных ситуаций в условиях неопределенности среды. Устройство содержит измерительный блок 1, содержащий блок датчиков 2 и блок преобразования измерительной информации в цифровые коды 3, сигналы от которого поступают в пункт контроля 4, включающий рабочее место оператора 5 с графическим экраном 6, интеллектуальной системой 7, логическим блоком 8, ЭВМ 9, процессором нечеткой логики 10 и нейрокомпьютером 11.
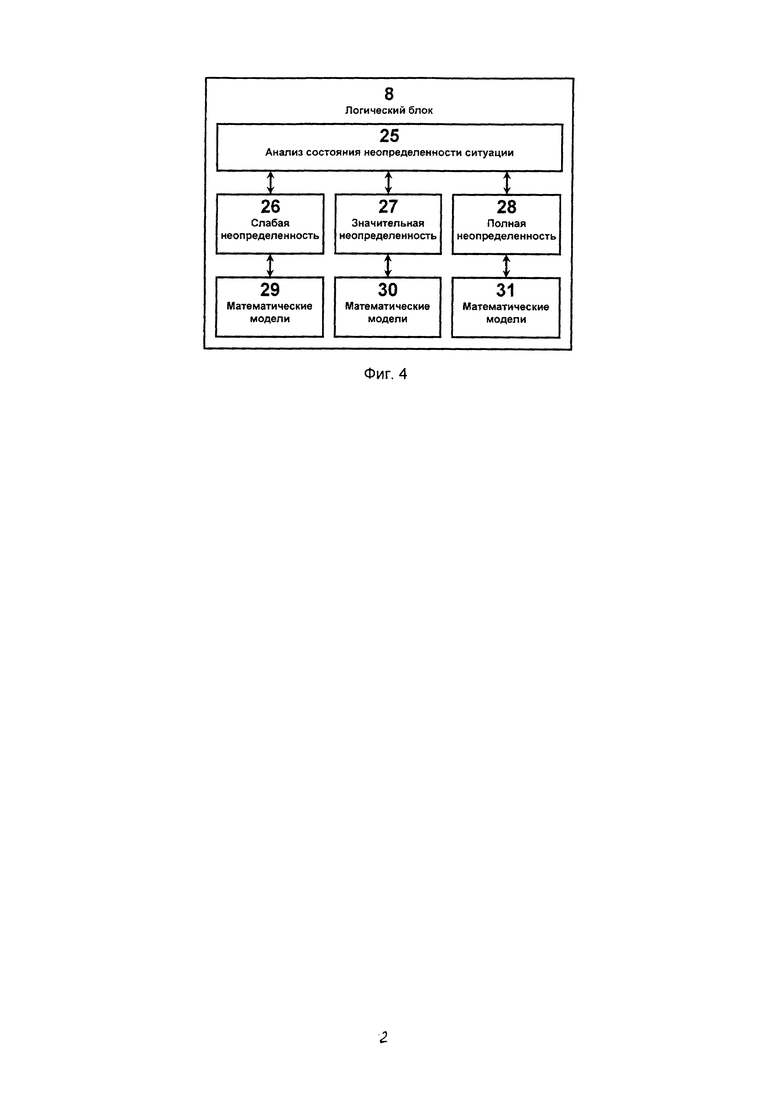
На фиг. 2 представлен блок датчиков 2, который содержит датчики контролируемых параметров судна, включая датчики метацентрической высоты 12, равновесных значений средней осадки 13, углов крена 14 и дифферента 15, скорости судна 16, скорости и направления ветра 17, 18, высоты и курсового угла волны 19, 20. Контролируемые параметры определяются в зависимости от задачи контроля на основе интеллектуальной системой 7.
На фиг. 3 показано функционирование интеллектуальной системы 7 на базе измерительной информации, поступающей с блока 1, которая устанавливает факт возникновения экстремальной ситуации, вырабатывает управляющие воздействия по контролю текущей ситуации, содержит базу знаний 21, механизм логического вывода 22, систему объяснения 23 и базу данных 24, реализуется на базе процессора нечеткой логики 10 и бортовой ЭВМ 9, представляющей собой многопроцессорный вычислительный комплекс.
На фиг. 4 представлен логический блок 8, который обеспечивает функционирование устройства контроля при анализе и прогнозе текущих ситуаций в условиях неопределенности среды, классификация которой 25 позволяет выделить слабую неопределенность 26, значительную неопределенность 27 и полную неопределенность 28 с конкретной интерпретацией соответствующих математических моделей 29, 30, 31, в том числе и при возникновении экстремальных ситуаций, связанных с воздействием значительных внешних возмущений и выходом измеряемых характеристик судна за принятые ограничения, управляется на основе интеллектуальной системы 7, обеспечивающей с помощью ЭВМ 9 идентификацию, анализ и прогноз текущей ситуации и обучение самоорганизующейся нейронной сети. Логические операции, выполняемые в блоке 8, поддерживаются процессором нечеткой логики 10, а операции по самоорганизации нейронной сети на основе нейрокомпьютера 11.
Способ осуществляется следующим образом.
Кодированный командный сигнал с кодом, соответствующим заданному измерительному элементу блока датчиков 1, подается с рабочего места оператора 4 пункта контроля (рулевая рубка) и переводит его из ждущего режима в режим измерения. В этом режиме аналоговые сигналы с блока измерения 2 поступают на блок преобразования измерительной информации 3, где осуществляется их необходимое усиление и преобразование в цифровые коды. Сигналы от преобразователей поступают на вход логического блока 8, который производит обработку информации, поступившей от блоков измерения 2 и преобразователей 3. Результат вычислений на рабочем месте оператора 5, оснащенного графическим экраном 6, соединенным интерфейсами с ЭВМ 9, процессором нечеткой логики 10 и нейрокомпьютером 11, сравнивается с данными, полученными при метрологической аттестации, и поступает для дальнейшей обработки в интеллектуальную систему 7, содержащую базу знаний 21, механизм логического вывода 22, систему объяснений 23 и базу данных 24, осуществляющую анализ состояния неопределенности ситуации 25 и выделения слабой 26, значительной 27 и полной неопределенности 28 с конкретной интерпретацией соответствующих математических моделей 29, 30, 31 в зависимости от сложившейся ситуации, при идентификации экстремальной ситуации, установленной в процессе функционирования интеллектуальной системы 7 на основе бортовой ЭВМ 9, команда управления дальнейшей обработкой информации в логическом блоке 4 на основе механизма вывода 22 интеллектуальной системы 7, реализуемого процессором нечеткой логики 10, обеспечивает анализ неопределенности ситуации 25 и прогноз ее развития с учетом моделей 29, 30, 31, а также обучение и формирование самоорганизующейся нейронной сети на основе нейрокомпьютера 11.
Способ обработки информации при контроле неопределенности на основе анализа и целенаправленного изменения величины комплексного энтропийного потенциала LΔ контролируемого параметра системы состоит в выполнении последовательности преобразований:
1. Определяют базовое значение параметра системы с использованием данных измерений и принципа максимума информации, реализация которого обеспечивает максимум взаимной информации между условиями среды и реакциями системы:

где X - внешнее воздействие; Y - реакция на внешнее воздействие с целью получения полезного результата: чем больше взаимная информация, тем теснее связь и тем меньше энтропия H(X,Y).
2. Определяют неопределенность системы на универсальном множестве, в котором величина энтропии исследуемого параметра образует ядро множества, содержащего преобразования, позволяющие представить величину энтропии H(y), энтропийного потенциала ΔЭ и его приращения δΔЭ на основе соотношений:


Здесь p(y) - закон распределения исследуемого параметра; KЭ - энтропийный коэффициент; σ - величина среднеквадратического отклонения, характеризующая степень рассеяния исследуемого параметра системы.
3. Устанавливают уровень неопределенности ситуации с использованием конкурентного отношения, определяемого функцией интерпретации:

где KC≤1 - коэффициент «жесткости» конкуренции: 0,8<KC<1 соответствует структуре модели оценки ситуации 29, 0,5<KC<0,8 - для модели оценки ситуации 30 и KC<0,5 - для модели 31; YA и YB - области нечетких отношений для конкурирующих моделей; ФA и ФB - графическая интерпретация нечетких отношений.
4. Осуществляют распознавание состояний неопределенности системы в конкретный момент времени на основе количественно измеренных признаков текущей ситуации Pk, вектор которых µjk образует информационное пространство признаков в зависимости от особенностей взаимодействия, уровня действующих возмущений и функции интерпретации (4):

5. Формируют математические модели, описывающие динамику изменения неопределенности с использованием данных (3): при незначительной неопределенности 26 - на основе методов классической математики 29; при значительной неопределенности 27 - с помощью моделей, построенных в рамках нечеткого и нейросетевого логического базиса 30; при полной неопределенности 28 - на основе гипотез и упрощающих предположений 31.
6. Рассчитывают величину комплексного энтропийного потенциала LΔ с использованием функцией интерпретации (5) в соответствии с зависимостью

где (σKЭ)φ - энтропийный потенциал, вычисленный для заданного уровня неопределенности; (XП)φ - базовое значение параметра XП, относительно которого рассматривается состояние неопределенности с использованием конкурентного отношения.
7. Выделяют базовые значения параметра (XП)φ и выполняют процедуру (6) на основе результатов идентификации ситуации в логическом блоке 8 в зависимости от уровня ее неопределенности.
8. Определяют изменение величины LΔ по величине приращения ΔLΔ или дифференциала комплексного энтропийного потенциала d(σKЭ)φ, используя результаты прогноза развития ситуации на основе логического вывода 22 интеллектуальной системы 7.
9. Реализуют управление состоянием неопределенности системы на основе интеллектуальной системы 7 с использованием бортовой ЭВМ 9 и процессора нечеткой логики 10 путем изменения базового значения параметра (XП)φ с учетом диапазона его изменения или предельного значения, или величину его математического ожидания, или базовую величину энтропийного потенциала (σKЭ)φ.
Функционирование устройства, реализующего способ контроля экстремальной ситуации в условиях неопределенности, осуществляется в виде следующей последовательности шагов:
Шаг 1. Составляют спецификацию режимов работы устройства в различных условиях эксплуатации, в том числе в экстремальных ситуациях.
Шаг 2. Осуществляют проверку возникновения экстремальной ситуации на основе интеллектуальной системы 7.
Шаг 3. Если экстремальная ситуация не возникла, то дальнейший контроль неопределенности ситуации осуществляют в процессе функционирования интеллектуальной системы 7 путем оценки ситуации на базе критериев, определяющих выход измеряемых характеристик за принятые ограничения, с использованием информации, поступившей с блока датчиков 2 и модуля преобразования 3, выдачей практических рекомендаций и принятия решения по управлению судном в текущей ситуации.
Шаг 4. Если экстремальная ситуация возникла, то формируют логику функционирования устройства контроля на основе интеллектуальной системы 7 и логического блока 8, выполняющего функции анализа и прогноза ситуации и обучения самоорганизующейся нейронной сети в блоке 11.
Обучение самоорганизующейся нейронной сети осуществляют на основе нейрокомпьютера 11 с помощью стандартного алгоритма Кохонена, использующего соревновательный принцип обучения на конкретных примерах реализации сигналов от датчиков блока датчиков 2, воспринимающих динамику взаимодействия судна с внешней средой в экстремальных ситуациях. В процессе обучения каждому входному параметру xi (i=1, …, n) сопоставляют измерение, точки которого образуют класс связанных областей точек. Этот класс запоминается и используется при функционировании устройства для решения задачи контроля и управления.
Для обеспечения надежности работы устройства контроля неопределенности в экстремальных ситуациях используют данные динамических измерений, близкие к предельным значениям базового параметра в непрерывно изменяющихся внешних условиях.
Практическая реализация разработанного способа связана с проблемой старения информации, что требует непрерывного поддержания работоспособности устройства на базе фактической информации о поведении судна в различных условиях эксплуатации.
В результате использования предлагаемого изобретения в процессе функционирования интеллектуальной системы 7, процессора нечеткой логики 10 и нейрокомпьютера 11 формируется гибкое информационное пространство контроля состояния неопределенности текущей ситуации, включающее методы принятия решений в нечеткой среде и нейросетевые модели, настраиваемые адаптивные автоматизированные циклы обучения нейронных сетей с учетом особенностей динамики взаимодействия судна с внешней средой в различных условиях эксплуатации, в том числе в экстремальных ситуациях. Обработка измерительной информации и управление процессом диагностики осуществляются в режиме реального времени.
Изобретение может быть использовано для непрерывного контроля, оценки и прогнозирования состояния неопределенности взаимодействия судна с внешней средой. Техническим результатом является повышение степени надежности функционирования бортовых систем для обеспечения безопасности мореплавания судов при возникновении экстремальных ситуаций. Для достижения технического результата в предлагаемом способе регистрируют сигналы в блоке измерений параметров судна и внешней среды в экстремальной ситуации, устанавливают уровень неопределенности ситуации и сравнивают текущие значения параметров энтропии с заранее зафиксированными значениями. При возникновении экстремальной ситуации в условиях большой неопределенности определяют базовое значение определяющего параметра, относительно которого рассматривается состояние неопределенности, энтропийного потенциала и его приращения с использованием конкурентного отношения, осуществляют распознавание уровня неопределенности и формируют математические модели динамики изменения неопределенности, рассчитывают величину комплексного энтропийного потенциала и определяют изменение характеристик энтропии, прогнозируют развитие ситуации. 4 ил.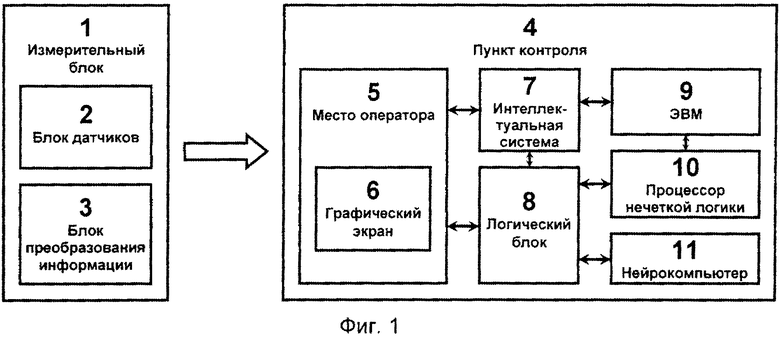
Способ контроля экстремальных ситуаций в условиях неопределенности среды, основанный на анализе и целенаправленном изменении величины комплексного энтропийного потенциала LΔ параметра системы, состоящий в определении базового значения параметра системы и расчете величины комплексного энтропийного потенциала LΔ в соответствии с зависимостью LΔ=(σКэ)/ХП и определении его изменения после каждого этапа эволюции или управления системой по величине LΔ приращения или дифференциала комплексного энтропийного потенциала, управляют состоянием неопределенности системы по величине LΔ путем изменения настроек базового значения, задающих диапазон изменения параметра или его предельного значения, или величину его математического ожидания, или величину установки регулятора, или его номинальное значение, или базовую величину энтропийного потенциала, где σ
- величина среднеквадратического отклонения параметра системы; Кэ - энтропийный коэффициент, величина которого определяется законом распределения параметра; ХП - базовое значение, относительно которого определяется состояние неопределенности, отличающийся тем, что при контроле экстремальной ситуации в условиях неопределенности среды в виде ветроволновых возмущений и нештатного режима работы системы измерений параметров судна и внешней среды фиксируют величину энтропии, энтропийного потенциала и его приращения в зависимости от уровня неопределенности с использованием конкурентного отношения по формуле

где Кс≤1 - коэффициент конкуренции: 0,8<Кс<1 соответствует структуре первой модели оценки ситуации, 0,5<Кс<0,8 - для второй модели оценки ситуации и Кс<0,5 - для третьей модели оценки ситуации; YA и YB - области нечетких отношений для конкурирующих моделей; ФA и ФB - графическая интерпретация нечетких отношений, выделяют базовые значения параметра ХП, осуществляют идентификацию ситуации неопределенности по величине сигналов от блока датчиков динамических измерений, соответствующих базовому значению параметра ХП, формируют аппаратную структуру, реализующую выбор уровня неопределенности с использованием критериев превышения базовых значений измеряемых параметров блока датчиков и модуля преобразования, определяют изменение параметров энтропии, прогнозируют развитие ситуации с помощью самоорганизующейся нейронной сети и в режиме реального времени реализуют управление судном, используя многопроцессорный вычислительный комплекс.
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ СОСТОЯНИЕМ НЕОПРЕДЕЛЕННОСТИ СИСТЕМЫ | 2007 |
|
RU2334262C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ПРОЕКТИРОВАНИЕМ БОРТОВЫХ ИНТЕЛЛЕКТУАЛЬНЫХ СИСТЕМ | 2012 |
|
RU2502131C1 |
| СПОСОБ КОНТРОЛЯ ПРОЧНОСТИ И ВИБРАЦИИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2363935C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ ПО КУРСУ И ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2519315C2 |
| US 7251638 B2, 31.07.2007. | |||

