Группа изобретений относится к радиопеленгации и может использоваться для определения пеленга источника (источников) радиоизлучения (ИРИ).
Известен способ определения пеленга, формируемого из массива одиночных пеленгов (И.С.Кукес, М.Е.Старик. Основы радиопеленгации. - М.: Сов. радио, 1964, сс.510, 511, рис.8.56), при котором суммируются значения одиночных пеленгов и их число (количество признаков обнаружений), а по окончании времени усреднения формируется среднее значение пеленга как отношение суммы значений одиночных пеленгов к числу их обнаружений 
Известный способ радиопеленгации является наиболее близким по совокупности существенных признаков к предлагаемому способу определения пеленга.
Известно также устройство для определения пеленга по патенту РФ №21458 на полезную модель «Автоматический радиопеленгатор», МПК G01S 3/02, опубл. 20.01.2002, выбранное в качестве прототипа, в котором реализован данный способ определения пеленга. Устройство содержит последовательно соединенные антенну, состоящую из L вибраторов, расположенных по окружности, и центрального вибратора, коммутатор, блок определения одиночных пеленгов и блок отношения суммы одиночных пеленгов к числу признаков обнаружений (усреднитель), а также блок управления (микро-ЭВМ).
При использовании данного способа и устройства для определения пеленга в значение параметра, определяемого формулой (1), существенную ошибку вносят одиночные импульсные помехи и моменты переключения ИРИ (абонентов) с приема на передачу и наоборот. Причина заключается в том, что радиопеленгатор должен пеленговать ИРИ, которыми могут быть как аварийные радиобуи, так и радиостанции. Последние, в свою очередь, служат для обмена сообщениями между собой по эфиру в режиме симплексной связи, т.е. одна радиостанция включена на передачу, а вторая - на прием. После передачи сообщения первая радиостанция может переключиться на прием, а вторая - на передачу и продолжить обмен сообщениями в противоположном направлении. В этом случае радиостанции можно рассматривать как ИРИ, между которыми выполняется обмен сообщениями. Так, например, если во время усреднения одиночных угловых значений пеленгуемого ИРИ, возникнет импульсная помеха, то ее влияние будет тем больше, чем больше отличие ее углового значения от среднего значения пеленга. Такая же ситуация возникнет и в момент переключения абонентов, если, например, принять равным число признаков обнаружений от первого и второго ИРИ и они находятся в разных направлениях относительно радиопеленгатора, то результирующий пеленг будет соответствовать среднему направлению между ними, где в действительности источников нет. А если к этому добавить еще и импульсные помехи, то значение определяемого пеленга может быть каким угодно.
Кроме того, известно, что радиопеленгаторы, в основе работы которых используются алгоритмы, основанные на эффекте Допплера, не способны различать коррелированные сигналы от нескольких ИРИ с разных направлений, по этой причине сигналы также не разрешаются, что тоже приводит к значительным ошибкам определения пеленга.
Техническим результатом группы изобретений является повышение точности определения пеленга за счет уменьшения влияния импульсных помех и моментов переключения абонентов.
Указанный технический результат достигается тем, что в способе определения пеленга, формируемого из массива одиночных пеленгов, согласно изобретению значения одиночных пеленгов группируют по направлениям источника радиоизлучения (ИРИ), в каждом из которых выполняют накопление признаков обнаружения и определяют максимальные значения в каждой группе, которым соответствуют усредненные направления ИРИ в каждой группе.
Кроме того, значения одиночных пеленгов по направлениям ИРИ группируют, преобразуя значения одиночных пеленгов в дискретные двумерные адреса - матрицу (K×N), столбцы К которой соответствуют дискретным угловым адресам (направлениям), а строки N - номерам временного интервала предварительно определенных направлений, в которые записывают признаки обнаружения пеленгуемых сигналов и выполняют суммирование значений в каждом столбце.
Накопление просуммированных признаков обнаружения выполняют сверткой строки угловых направлений, каждый элемент которой является результатом суммы значений в соответствующем столбце, и определяют максимальные значения, соответствующие усредненным значениям в этих группах.
В устройстве для осуществления способа указанный технический результат достигается тем, что в устройство для определения пеленга, содержащее последовательно соединенные антенну, состоящую из L вибраторов, расположенных по окружности, и центрального вибратора, коммутатор и блок определения одиночных пеленгов, а также блок управления, согласно изобретению введены блок раздельного накопления признаков обнаружения (БРНПО) и формирователь угловых координат, при этом первый выход блока определения одиночных пеленгов соединен с информационным входом БРНПО, второй выход блока определения одиночных пеленгов соединен с адресными входами БРНПО и формирователя угловых координат, причем выход БРНПО соединен с информационным входом формирователя угловых координат, выход которого является выходом устройства, а управляющие входы коммутатора, блока определения одиночных пеленгов и БРНПО соединены с выходами блока управления.
Согласно заявляемому способу определения пеленга одномерный массив одиночных угловых измерений (единичных пеленгов) длительностью N преобразуется в двумерный массив признаков обнаружения, число строк которого совпадает с длительностью первоначального массива N, а число столбцов соответствует количеству адресных дискретов, в которых выполняется построчное суммирование этих признаков, а затем свертка. Этими операциями достигается группировка признаков обнаружения вблизи угловых адресов соответствующих ИРИ, что обеспечивает наиболее точное измерение угла пеленга (или нескольких, если число признаков от них примерно равно), в случае одиночных импульсных помех, которые возникают с произвольных направлений, существенного влияния на положение значения максимального уровня свертки не оказывают, с этой целью в устройство определения угла пеленга вместо усреднителя, имеющегося в прототипе, введены блок раздельного накопления и формирователь угловых координат.
Поэтому в данном случае необходимо выполнить раздельное накопление, которое может быть реализовано в виде свертки в угловом секторе в соответствии с выражением

Охарактеризованная указанными выше существенными признаками группа изобретений на дату подачи заявки не известна в Российской Федерации и за границей и отвечает требованиям критерия ″новизна″.
Заявителем не выявлены технические решения, имеющие признаки, совпадающие с совокупностями отличительных признаков заявляемых изобретений, обеспечивающих достижение заявляемого технического результата, в связи с чем можно сделать вывод о соответствии изобретений условию патентоспособности "изобретательский уровень".
Изобретения могут быть реализованы промышленным способом с использованием известных технических средств, технологий и материалов и соответствуют требованиям условия патентоспособности ″промышленная применимость″.
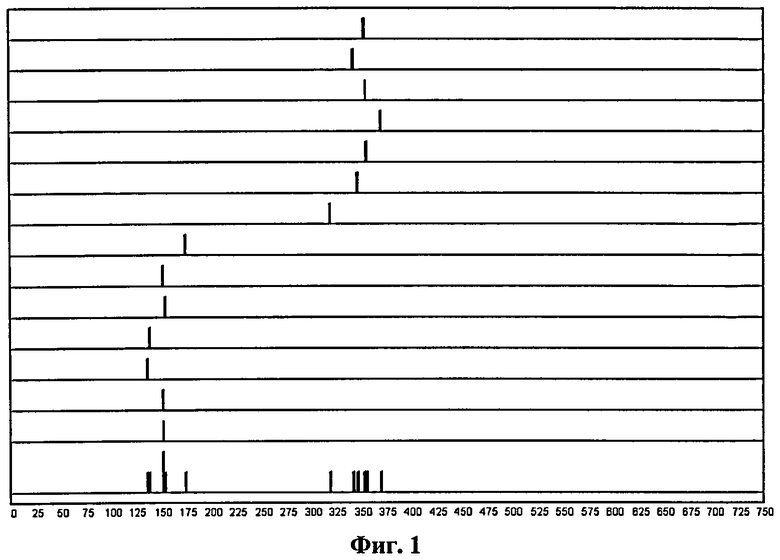
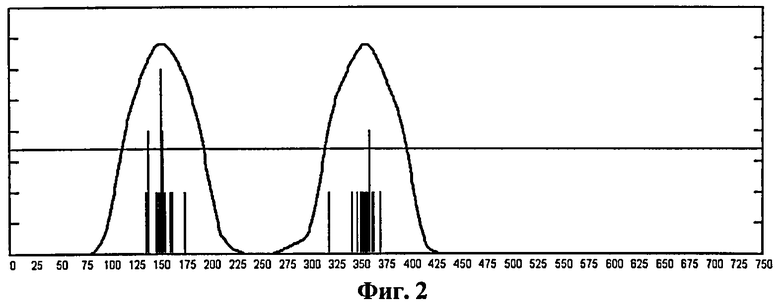
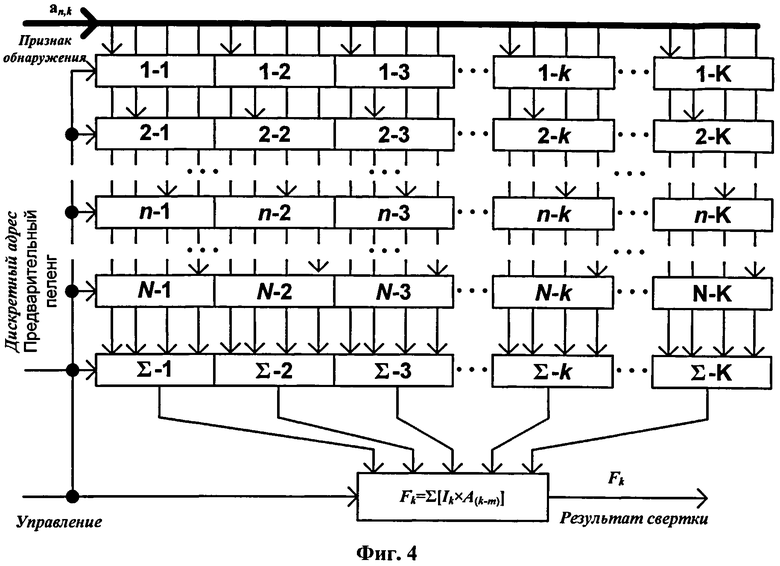
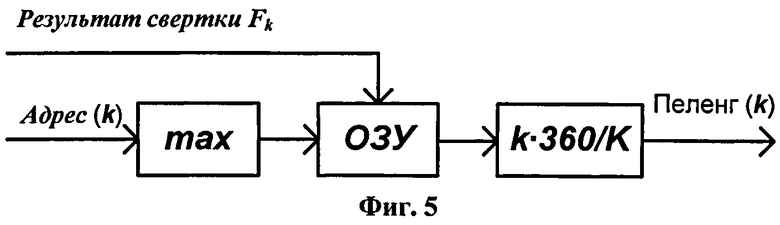
Изобретения поясняются графическими материалами, где на фиг.1 изображены циклограммы преобразованного массива одиночных пеленгов в двумерный вид признаков и результат построчного суммирования; на фиг.2 - циклограммы результата свертки построчного суммирования и уровень от половины ее максимального значения; на фиг.3 показана структурная схема устройства для определения пеленга; на фиг.4 - блок-схема блока раздельного накопления признаков обнаружения; на фиг.5 - блок-схема формирователя угловых координат.
В способе определения пеленга одномерный массив одиночных угловых измерений длительностью N, предназначенный для определения среднего значения, согласно изобретению:
- преобразуется в двумерный массив, число строк которого совпадает с длительностью первоначального массива N, число столбцов соответствует количеству адресных дискретов, а значения массива равны ″1″, если сигнал обнаружен, или ″0″, если сигнал не обнаружен (на фиг.1 верхние 14 линий);
- затем эти значения ″1″ и ″0″ построчно суммируются, преобразуя двумерный массив в одномерный, длительность которого соответствует количеству адресных дискретов (на фиг.1 нижняя линия), а элементы массива также принимают дискретные значения, любые от 0 до N;
- далее вычисляется циклическая свертка этого массива в угловом секторе в соответствии с выражением (2) и определяется максимальный уровень функции свертки (на фиг.2 сплошная кривая);
- все неразрывные значения выше половины этого уровня группируются в отдельные области, причем сколько таких неразрывных областей адресных значений, столько и ИРИ (в данном примере таких областей две, первая - в адресном интервале от 111 до 193, а вторая - от 313 до 396);
- в каждой такой области определяется локальный максимум, каждому из которых соответствует угловой адрес, порядковый номер в массиве (в данном примере локальный максимум первой области соответствует адресному значению 152, а второй области - адресному значению 355);
- т.к. аппаратная погрешность выбрана не более 0,5°, то на участке от 0° до 360° угловых адресов К = 750, поэтому определенным адресным значениям 152 и 355 ставятся в соответствие два значения пеленгов 72,92° и 170,4° соответственно.
Устройство для определения пеленга, структурная схема которого представлена на фиг.3, включает последовательно соединенные антенну 1, состоящую из L антенных вибраторов, расположенных по окружности (на схеме показано 8 вибраторов), и одного центрального вибратора, коммутатор 2, формирующий из L антенных сигналов объединенный канал, и блок 3 определения одиночных пеленгов (предварительного определения пеленга), в котором реализован алгоритм, основанный на эффекте Допплера, а также блок 4 управления (синхронизации) работой устройства.
Согласно изобретению в устройство введены блок 5 раздельного накопления признаков обнаружения (БРНПО), блок-схема которого показана на фиг.4, и формирователь 6 угловых координат (см. фиг.5). Первый выход блока 3 определения одиночных пеленгов соединен с информационным входом БРНПО 5, второй выход блока 3 определения одиночных пеленгов соединен с адресными входами БРНПО 5 и формирователя 6 угловых координат, а выход БРНПО 5 соединен с информационным входом формирователя 6 угловых координат. Управляющие входы коммутатора 2, блока 3 определения одиночных пеленгов и БРНПО соединены с выходами блока 4 управления, при этом выход формирователя 6 угловых координат является выходом устройства.
Способ определения пеленга реализуется предлагаемым устройством следующим образом.
Под действием электромагнитного поля, которое создается пеленгуемым ИРИ, на вибраторах (диполях) антенны 1 формируются сигналы, значение фаз которых зависит от направления на ИРИ. Эти сигналы, переключаемые коммутатором 2, и сигнал с центрального вибратора поступают на входы блока 3 определения одиночных пеленгов, где формируется признак обнаружения: лог.″1″ - если сигнал превышает заданный ″пороговый″ уровень, или лог.″0″ - если сигнал не превышает ″пороговый″ уровень. Одновременно с признаком (лог.″1″ или лог. ″0″) формируется дискретный адрес углового направления на ИРИ.
Признаки обнаружения каждый раз за полный цикл анализа сигналов с вибраторов антенны с соответствующими им угловыми адресами поступают на входы БРНПО 5 и записываются в n-ую строку (здесь количество строк N соответствует максимально возможному числу усреднения предварительных пеленгов, а информация в строке перед каждой записью в нее нового признака обнаружения предварительно обнуляется) k-го столбца, номер которого соответствует предварительно определенному дискретному угловому адресу, а номер строки циклически меняется. После записи признака в любую ячейку памяти, в том числе и нулевого значения, когда сигнал не обнаружен, в каждом столбце выполняется суммирование всех N строк (см. фиг.4). Таким образом, по каждому угловому адресу (k-го столбца) формируется динамически меняющаяся во времени информация (совокупности признаков), представляющая собой результат суммы в ″скользящем окне″ (см. фиг.1).
Совокупность накопленных дискретных признаков, соответствующих угловым адресам, усредняется в ″скользящем″ угловом секторе (см. фиг.2) методом циклической свертки; результатом этой операции является пеленгационная характеристика. В совокупности дискретных отсчетов пеленгационной характеристики определяется максимальное значение, половинный уровень которого является "порогом" разграничения сигналов. Все дискретные значения пеленгационной характеристики, которые превышают этот уровень, поступают на выход блока 5 без изменения, а значениям ниже этого уровня присваиваются нули, которые также поступают на выход БРНПО 5.
С выхода БРНПО 5 массивы от разных источников, разделенные между собой нулевыми значениями, поступают на вход формирователя 6 угловых координат. В каждом из выделенных массивов определяется максимальное значение, соответствующее угловому адресу (в рассматриваемом примере эти значения равны 152 и 355 соответственно), которые записываются в оперативно запоминающее устройство (ОЗУ). После чего они пересчитываются в формирователе 6 угловых координат в соответствующие угловые значения (для рассматриваемого примера первый пеленг равен 
Все блоки устройства могут быть выполнены с использованием цифровых микросхем любой серии: регистров - ИР; сумматоров - ИМ; схем сравнения - СП; памяти - РУ и РТ и т.д., которые выпускаются в большом ассортименте.
Таким образом, предложенный способ определения пеленга и устройство для его осуществления позволяют повысить точность измерения угла пеленга за счет раздельного накопления одиночных признаков и исключить из общего усреднения импульсные помехи, а также выполнять одновременно пеленгование двух абонентов с высокой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКОГО ОБНАРУЖЕНИЯ-ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С РАСШИРЕННЫМ СПЕКТРОМ | 2011 |
|
RU2470315C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ СО СКАЧКООБРАЗНЫМ ИЗМЕНЕНИЕМ ЧАСТОТЫ | 2004 |
|
RU2285936C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ ПЕЛЕНГАЦИИ МНОЖЕСТВА ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ, ОДНОВРЕМЕННО ПОПАДАЮЩИХ В ПОЛОСУ ПРИЕМА | 2001 |
|
RU2207583C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2327181C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ УГЛОВЫХ КООРДИНАТ РАДИОСИГНАЛА В АМПЛИТУДНЫХ МОНОИМПУЛЬСНЫХ ПЕЛЕНГАЦИОННЫХ СИСТЕМАХ | 2016 |
|
RU2625349C1 |
| ОБНАРУЖИТЕЛЬ РАДИОПЕРЕДАЧ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ (ВАРИАНТЫ) | 2005 |
|
RU2292643C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2341811C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА В РАДИОЛОКАЦИОННОЙ СИСТЕМЕ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2003 |
|
RU2237909C1 |
Группа изобретений относится к радиопеленгации и может использоваться для определения пеленга источника (источников) радиоизлучения (ИРИ). Достигаемый технический результат - повышение точности определения пеленга за счет уменьшения влияния импульсных помех и моментов переключения абонентов. Указанный результат достигается за счет того, что значения одиночных пеленгов группируют по направлениям источника радиоизлучения (ИРИ), в каждом из которых выполняют накопление признаков обнаружения и определяют максимальные значения в каждой группе, которым соответствуют усредненные направления ИРИ в каждой группе. Устройство для определения пеленга содержит последовательно соединенные антенну, состоящую из L вибраторов, расположенных по окружности, и центрального вибратора, коммутатор и блок определения одиночных пеленгов, а также содержит блок управления, блок раздельного накопления признаков обнаружения (БРНПО) и формирователь угловых координат, определенным образом соединенные между собой. 2 н. и 2 з.п. ф-лы, 5 ил.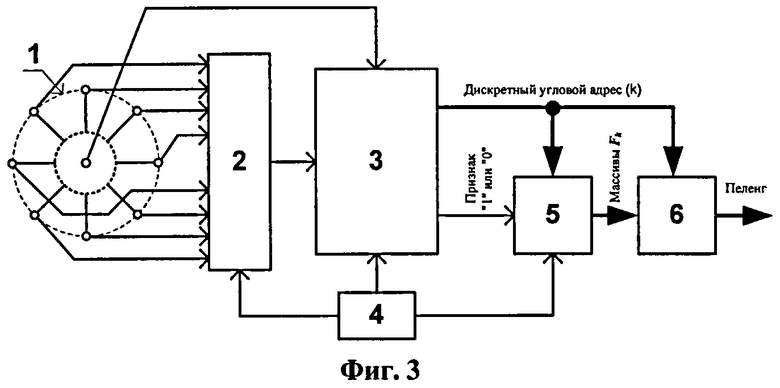
1. Способ определения пеленга, формируемого из массива одиночных пеленгов, отличающийся тем, что значения одиночных пеленгов группируют по направлениям источника радиоизлучения (ИРИ), в каждом из которых выполняют накопление признаков обнаружения, и определяют максимальные значения в каждой группе, которым соответствуют усредненные направления ИРИ в каждой группе, при этом признаком обнаружения для одиночных пеленгов ИРИ является превышение сигналом ИРИ заданного порогового уровня.
2. Способ по п.1, отличающийся тем, что значения одиночных пеленгов по направлениям ИРИ группируют, преобразуя их в дискретные двумерные адреса - матрицы (K×N), столбцы K которой соответствуют дискретным угловым адресам, а строки N - номерам временного интервала предварительно определенных одиночных пеленгов, в которые записывают признаки обнаружения пеленгуемых сигналов и выполняют суммирование значений в каждом столбце.
3. Способ по п.2, отличающийся тем, что накопление просуммированных признаков обнаружения выполняют сверткой строки угловых направлений, каждый элемент которой является результатом суммы значений в соответствующем столбце, и определяют максимальные значения, соответствующие усредненным значениям в этих группах.
4. Устройство для определения пеленга, содержащее последовательно соединенные антенну, состоящую из L вибраторов, расположенных по окружности, и центрального вибратора, коммутатор и блок определения одиночных пеленгов, а также блок управления, при этом центральный вибратор связан с блоком определения одиночных пеленгов непосредственно, отличающееся тем, что в него введены блок раздельного накопления признаков обнаружения (БРНПО) и формирователь угловых координат, при этом признаком обнаружения для одиночных пеленгов ИРИ является превышение сигналом ИРИ заданного порогового уровня, первый выход блока определения одиночных пеленгов соединен с информационным входом БРНПО, второй выход блока определения одиночных пеленгов соединен с адресными входами БРНПО и формирователя угловых координат, причем выход БРНПО соединен с информационным входом формирователя угловых координат, выход которого является выходом устройства, а управляющие входы коммутатора, блока определения одиночных пеленгов и БРНПО соединены с выходами блока управления.
| КУКЕС И.С., СТАРИК М.Е | |||
| Основы радиопеленгации | |||
| Москва, Советское радио, 1964, с.510-511, рис.8.56 | |||
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ДВУХКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 2001 |
|
RU2225990C2 |
| СПОСОБ ПЕЛЕНГАЦИИ МНОЖЕСТВА ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ, ОДНОВРЕМЕННО ПОПАДАЮЩИХ В ПОЛОСУ ПРИЕМА | 2001 |
|
RU2207583C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННО-ЧАСТОТНОГО РАСПРЕДЕЛЕНИЯ СИСТЕМАТИЧЕСКОЙ ОШИБКИ ПЕЛЕНГОВАНИЯ | 2011 |
|
RU2450282C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСШИРИТЕЛЯ ФС В ПАСТЕ ДЛЯ ОТРИЦАТЕЛЬНОГО ЭЛЕКТРОДА СВИНЦОВО-КИСЛОТНЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ | 2004 |
|
RU2279160C1 |
| US 5969676 A, 19.10.1999 | |||
| WO 1996009558 A1, 28.03.1996 | |||
| ГАЗОРАЗРЯДНЫЙ ИСТОЧНИК РЕЗОНАНСНОГО ИЗЛУЧЕНИЯ | 0 |
|
SU367487A1 |

