Изобретение относится к радиолокации, в частности к способам обзора пространства в многоцелевых радиолокационных системах (РЛС) с фазированными антенными решетками (ФАР).
С развитием антенной техники и, особенно, с появлением ФАР резко возросли возможности РЛС по обнаружению, захвату и сопровождению различных радиоконтрастных объектов (РКО). В РЛС появились новые режимы работы, практически реализуемые только при наличии в них ФАР: автоматическое сопровождение целей в режиме обзора, режим дискретного обзора, режим дискретного сопровождения и другие, которые потребовали разработки новых способов обзора пространства.
Известно достаточно большое число способов обзора пространства [1-10, 14], которые разделяют на [9, стр. 50]:
1) способы по жесткой программе
а) последовательный обзор;
б) параллельный обзор;
в) смешанный обзор;
2) адаптивные способы
а) программируемый обзор;
б) управляемый обзор.
Недостатками способов обзора пространства, в основе которых лежит жесткая программа [9, стр. 50; 10], являются: равномерное и, следовательно, неэффективное распределение временных и энергетических затрат в зоне поиска; достаточно большой интервал времени, необходимый для просмотра всей зоны обзора пространства; невозможность уменьшения периода обращения к отдельным РКО.
Недостатком программируемых способов обзора пространства является отсутствие возможности динамического управления очередностью зондирования угловых направлений.
Среди управляемых способов обзора пространства выделяют два варианта способов: способы обзора пространства при поиске заданного числа РКО и при поиске неизвестного числа РКО.
Недостатком способов обзора пространства при поиске заданного числа РКО является ограничение в применении, поскольку большинство решаемых РЛС задач как раз связано с поиском неизвестного числа РКО.
В известных способах обзора пространства поиск неизвестного числа РКО осуществляют поэтапно [4; 9, стр. 54]: на первом, предварительном, этапе осуществляют циклический обзор всей заданной зоны при фиксированной длительности зондирования, а на последующих этапах, начиная со второго, заданную зону обзора разбивают на угловые позиции, называемые ячейками, время просмотра которых определяют с учетом наблюдений, выполненных на предыдущих этапах.
Недостаток этих способов обусловлен тем, что при их использовании не учитываются особенности обработки принятых с заданной угловой позиции сигналов и правила принятия решения о наличии РКО в просмотренной ячейке [9, стр. 54].
В [9, стр. 56-60] приведен способ, не имеющий выше отмеченных недостатков, но он требует достаточно высокопроизводительной вычислительной системы, что резко ограничивает область его применения.
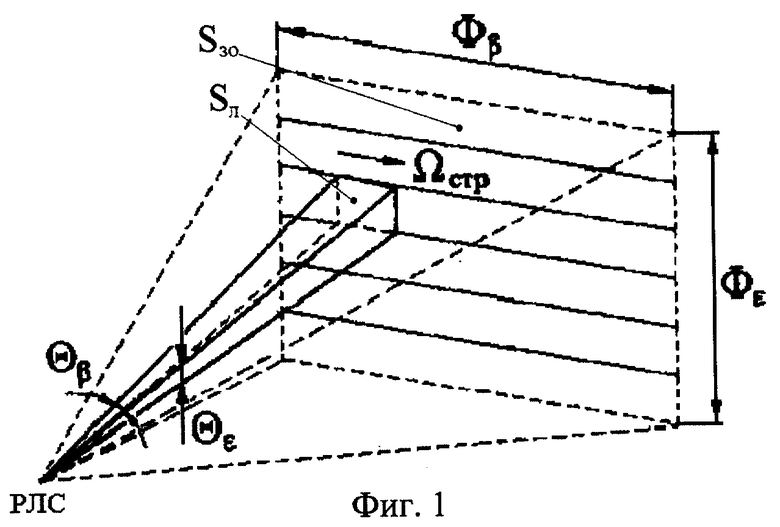
Из известных технических решений наиболее близким (прототипом) является кадровый способ обзора пространства, приведенный в [9, стр. 50-51]. В соответствии с этим способом, обзор заданной области пространства, определяемой телесным углом Фβ Фε (см. фиг.1), где Фβ и Фε - угловые размеры зоны обзора соответственно по азимуту и углу места, осуществляют таким образом, что луч диаграммы направленности антенны (ДНА) с телесным углом Θ β Θ ε , где Θ β и Θ ε - угловые размеры луча ДНА соответственно по азимуту и углу места, совершает относительно быстрое, с угловой скоростью Ω стр, возвратно-поступательное движение по одной угловой координате (например, как показано на фиг.1, в горизонтальной плоскости) и медленно изменяет свое положение по другой (как показано на фиг.1, в вертикальной плоскости). Период обзора Тпо заданного телесного угла Фβ Фε в прототипе определяется формулой

где T1 - время просмотра одного углового положения, которое задают исходя из времени, необходимого для обнаружения РКО с заданной вероятностью на максимальной дальности действия РЛС.
Недостатками прототипа являются: неэффективное распределение временных и энергетических затрат в зоне поиска; невозможность уменьшения периода обращения к отдельным РКО.
Таким образом, задачей изобретения является разработка такого способа обзора пространства, при котором обеспечивается заданный период обращения к отдельным РКО и высокая точность определения их координат, приближающаяся к точности режима непрерывной пеленгации.
Поставленная задача достигается тем, что непосредственно перед началом обзора пространства осуществляют следующее. Область пространства, в которой необходимо осуществлять поиск, обнаружение и сопровождение РКО, задают и запоминают в виде значений телесного угла Фβ Фε , где Фβ и Фε - размеры этого угла соответственно по азимуту и углу места (см. фиг.1). Делят этот телесный угол на N угловых позиций ДНА, называемых также направлениями и ячейками, количество которых определяют по формуле
где Sзо и Sзл - площадь зоны обзора и площадь луча ДНА, соответственно (см. фиг.1); К=1,2... 1,6 - коэффициент перекрытия. Положение угловой позиции ϕβiϕεj ДНА определяют по i-му азимуту ϕβi и j-му углу места ϕεj луча ДНА, где 
 , а черта над символами показывает, что переменная изменяется с шагом 1 от первого до последнего числа из указанного диапазона;
, а черта над символами показывает, что переменная изменяется с шагом 1 от первого до последнего числа из указанного диапазона;

- количество строк и столбцов, соответственно, в заданной зоне обзора.
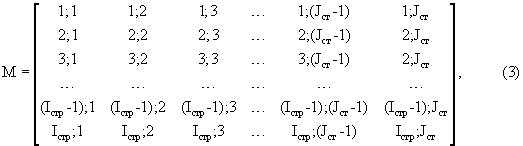
В соответствии с количеством угловых позиций N=Iстр×Jст создают и запоминают массив М угловых позиций, размером Iстр×Jст, следующего вида
где в каждой ячейке ij, расположенной на пересечении i-ой строки и j-го столбца, записывают два действительных числа, первое из которых (от 1 до Iстр) определяет номер угловой позиции по углу места ϕ βi, а второе (от 1 до Jст) - по азимуту ϕ εji.
Цикл обзора заданного телесного угла, в течение которого будет осуществлен просмотр всех N его угловых позиций, разбивают на такты, причем количество тактов не фиксируют, а последним в цикле считают тот такт, в котором будет просмотрена последняя угловая позиция, определяемая по факту отсутствия чисел в массиве М угловых позиций. Здесь и далее под тактом понимается временной интервал, в течение которого осуществляется последовательность действий, начиная от момента выбора номера угловой позиции, в которую будет направлена ДНА для излучения радиосигналов, до момента принятия решения о наличии или отсутствии РКО в этом направлении.
Задают временной интервал T1, в течение которого будет осуществляться зондирование угловой позиции ϕ βiϕ ε j исходя из времени, необходимого для обнаружения РКО с заданной вероятностью на максимальной дальности действия РЛС. Задают временной интервал T2=3T1 в течение которого будет осуществляться зондирование угловой позиции, на которой произошло обнаружение РКО.
Задают признак наличия целеуказаний Z, значение которого равно 1 при наличии целеуказаний, и 0 - при их отсутствии. Введение данного признака позволяет изменить порядок просмотра отдельных угловых позиций в зависимости от того, имеются или нет для РЛС от внешних систем управления целеуказания об определенной угловой позиции ϕ βiцуϕ ε jцу, где в первую очередь следует ожидать появления РКО.
Далее осуществляют следующее.
По значению признака Z проверяют есть или отсутствуют целеуказания об угловой позиции ϕ βiцуϕ ε jцу. Если Z=0, то выполняют действия, описанные ниже в §§1-15, если Z=1, то переходят к выполнению действий, начиная с описанных в §16.
§ 1. Проверяют наличие чисел в массиве М угловых позиций - в случае их отсутствия его заполняют действительными числами.
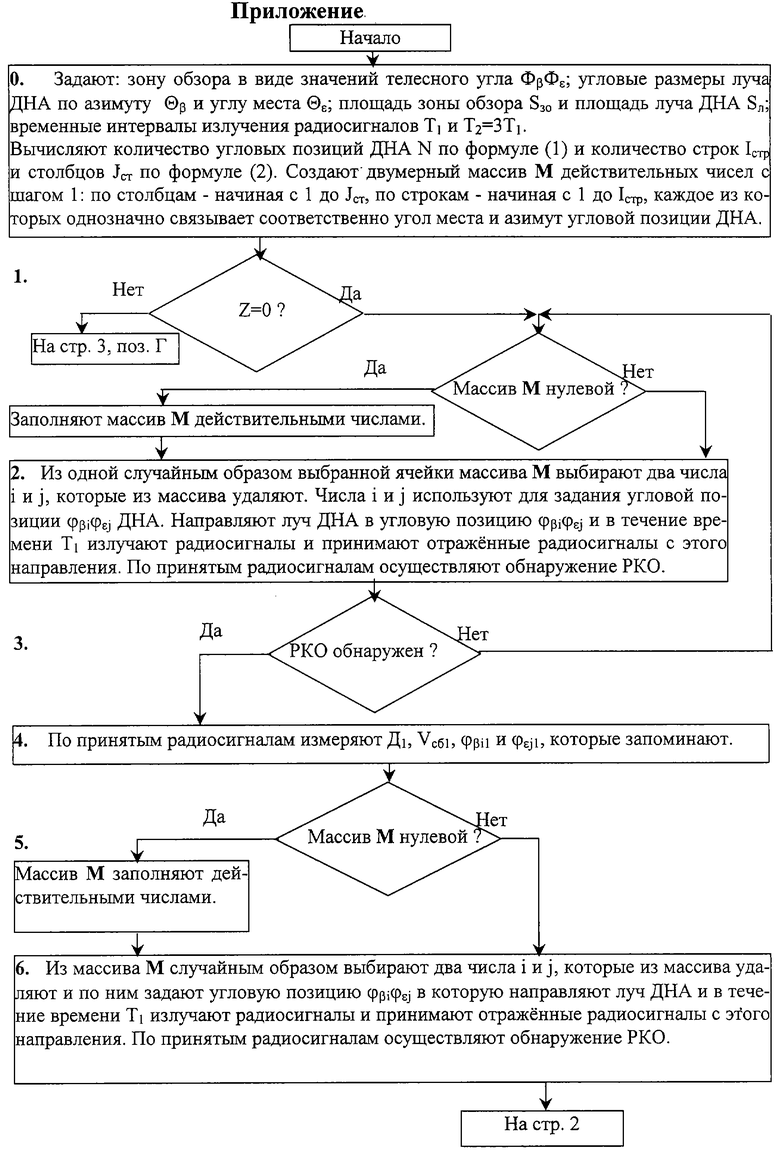
Для облегчения понимания последовательности описываемых действий при выполнении заявленного способа обзора пространства в Приложении эта последовательность приведена в виде блок-схемы алгоритма (см. в конце текста описания).
§2. Из одной, случайным образом выбранной, ячейки ij массива М считывают два числа, которые используют для задания положения угловой позиции ϕ βiϕ ε j ДНА, а сами числа из массива удаляют. Луч ДНА направляют в эту угловую позицию, в течение времени T1 излучают радиосигналы и принимают отраженные радиосигналы с этого направления. По принятым радиосигналам известным способом, например описанным в [12, 13], осуществляют обнаружение РКО.
§3. Если на этой угловой позиции ДНА РКО не обнаружены, то переходят к последующим тактам, выполняя последовательно §§ 1 и 2.
Если на очередном k-м такте при просмотре очередной угловой позиции ij обнаруживают РКО, то переходят к выполнению действий, описанных в §4.
§4. После обнаружения РКО по принятым отраженным сигналам известным способом, например описанным в [11, стр. 227-237, 268-275], осуществляют измерение дальности Д1 до РКО, скорости сближения Vcб1 с ним и его пеленгов ϕ βi1 и ϕ εi1. Измеренные значения Д1, Vcб1, ϕ βi1 и ϕ εj1 запоминают. Здесь и в дальнейшем подстрочная цифра или буква m означают номер РКО - первому обнаруженному РКО присваивается номер 1, второму - 2 и т.д..
§5. Проверяют наличие чисел в массиве М угловых позиций - в случае их отсутствия его, как и ранее, заполняют действительными числами.
§6. Из одной, случайным образом выбранной, ячейки ij массива М считывают два числа, которые используют для задания положения угловой позиции ДНА ϕ βiϕ ε j, а сами числа из массива удаляют. Луч ДНА направляют в угловую позицию ϕ βiϕ ε j и в течение времени T1 излучают радиосигналы и принимают отраженные радиосигналы с этого направления. По принятым радиосигналам осуществляют обнаружение РКО.
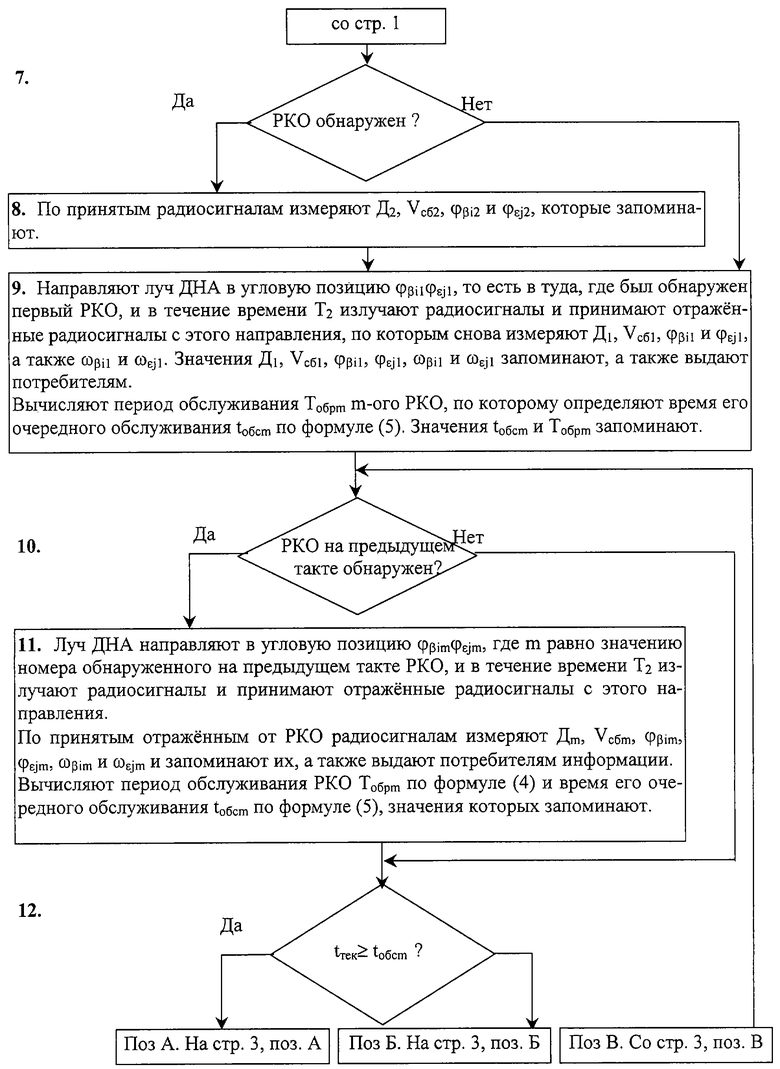
§7. Далее, если РКО обнаружен, выполняют действия, описанные в §8, в противном случае - выполняют действия, описанные в §9.
§8. По принятым отраженным сигналам осуществляют измерение дальности Д2 до второго РКО, скорости сближения Vсб2 с ним и его пеленгов ϕ βi2 и ϕ εj2. Измеренные значения Д2, Vсб2, ϕ βi2 и ϕ εj2 запоминают.
§9. ДНА направляют в угловую позицию ϕ βi1 и ϕ εj1, то есть туда, где был обнаружен первый РКО. На этой угловой позиции излучают радиосигналы и принимают отраженные радиосигналы в течение временного интервала Т2, причем для повышения точности измерений Д, Vсб, ϕ βi и ϕ εj возможно использование сложных сигналов. По принятым отраженным от РКО радиосигналам известным способом, например описанными в [11, стр. 243-260, 281-298], более точно измеряют Д1, Vc61, ϕ βi1 и ϕ εj1, а также измеряют угловые скорости линии визирования ω βi1, ω εj1 РКО соответственно в азимутальной и в угломестной плоскостях. Более высокая точность измерения координат РКО обусловлена тем, что увеличивается время накопления и обработки принимаемых от РКО радиосигналов. Измеренные значения Д1, Vcб1, ϕ βi1, ϕ εj1, ω βi1 и ω εj1 запоминают, а также передают потребителям информации.
Вычисляют период обслуживания РКО Тобсm (где для первого РКО m=1) - интервал времени, через который луч ДНА будет впоследствии направлен на угловую позицию, где, по расчетам, будет находиться m-ый РКО. Способ расчета Тобсm не влияет на заявленный способ обзора пространства и может быть любым, например, по формуле:

где Dϕ , 
 - дисперсии оценок пеленга (РКО и его производных
- дисперсии оценок пеленга (РКО и его производных  и
и  k - дискретное время.
k - дискретное время.
По рассчитанному периоду обслуживания Тобсm m-ого РКО определяют время его очередного обслуживания toбcm по формуле

где tтек - текущее время. Значения toбcm и Тобсm запоминают.
§10. Проверяют: был или не был обнаружен РКО на предыдущем такте. Если РКО был обнаружен, то выполняют действия, описанные в §11, в противном случае переходят к выполнению действий, описанных в §12.
§11. Луч ДНА направляют в угловую позицию ϕ βimϕ ε jm, то есть туда, где был обнаружен m-ый РКО на предыдущем такте. На этой угловой позиции излучают радиосигналы и принимают отраженные радиосигналы в течение временного интервала Т2. По принятым отраженным от РКО радиосигналам измеряют Дm, Vсбm, ϕ βim, ϕ εоm, ω βim и ω εjm которые запоминают, а также передают потребителям информации.
Вычисляют период Тобсm обслуживания РКО по формуле (4) и время tобсm его очередного обслуживания по формуле (5), которые запоминают.
§12. Сравнивают значение текущего времени tтек с временем tобсm очередного обслуживания m-го РКО. Если наступило время обслуживания m-ых РКО, то для каждого из них выполняют действия, описанные в §13, в противном случае, переходят к выполнению действий, описанных в §14.
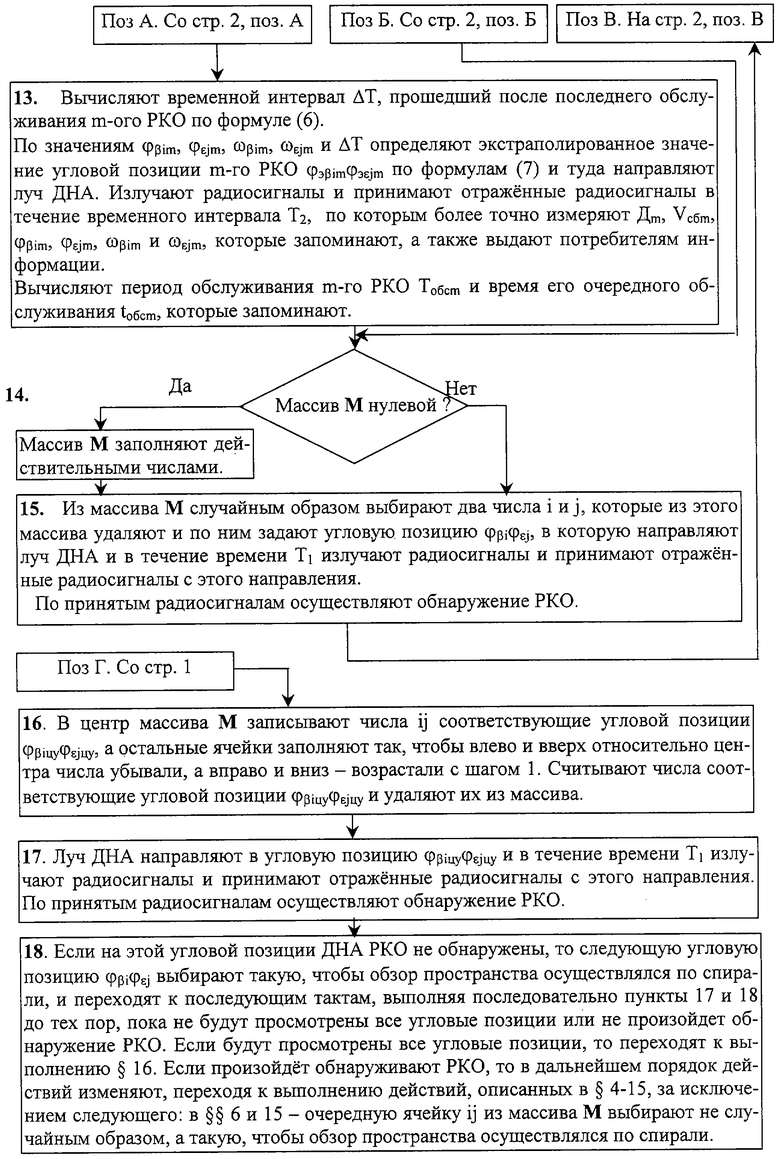
§13. Вычисляют временной интервал Δ T, прошедший после последнего обслуживания m-ого РКО по формуле

По запомненным значениям ϕ βim, ϕ εjm, ω βim, ω εjm и вычисленному значению Δ T определяют экстраполированное значение угловой позиции m-го РКО ϕ эβ imϕ эε jm по формулам


ДНА направляют в угловую позицию ϕ эβ imϕ эε jm, то есть туда, где по расчетам находится m-ый РКО, излучают радиосигналы и принимают отраженные радиосигналы в течение временного интервала T2. По принятым, отраженным от РКО, радиосигналам измеряют Дm, Vсбm, ϕ βim, ϕ εjm, ω βim и ω εjm, запоминают их, а также передают потребителям информации.
По формуле (4) вычисляют период обслуживания данного РКО Тобсm, и по формуле (5) определяют время его очередного обслуживания tобсm.
Значения tобсm и Тобсm запоминают.
§14. Проверяют наличие чисел в массиве М угловых позиций - в случае их отсутствия его, как и ранее, заполняют действительными числами.
§15. Из одной, случайным образом выбранной, ячейки ij массива М считывают два числа, которые используют для задания положения угловой позиции ДНА ϕ βiϕ ε j, а сами числа из массива удаляют. Луч ДНА направляют в угловую позицию ϕ βiϕ ε j в течение времени T1 излучают радиосигналы и принимают отраженные радиосигналы с этого направления. По принятым радиосигналам осуществляют обнаружение РКО.
После выполнения действий, описанных в §15, переходят к выполнению действий, описанных в §10, и процесс просмотра заданной зоны обзора продолжают в течение заданного времени, выполняя действия, описанные в §§10-15.
§16. В центр массива М угловых позиций записывают два действительных числа ij, соответствующие угловой позиции ϕ βiцуϕ ε jцу целеуказаний, а остальные ячейки заполняют так, чтобы влево и вверх относительно центра числа убывали, а вправо и вниз - возрастали с шагом 1. Считывают два числа, соответствующие угловой позиции ϕ βiцуϕ ε jцу, и удаляют их.
§17. Луч ДНА направляют в угловую позицию ϕ βiцуϕ ε jцу, в течение времени T1 излучают радиосигналы и принимают отраженные радиосигналы с этого направления. По принятым радиосигналам осуществляют обнаружение РКО.
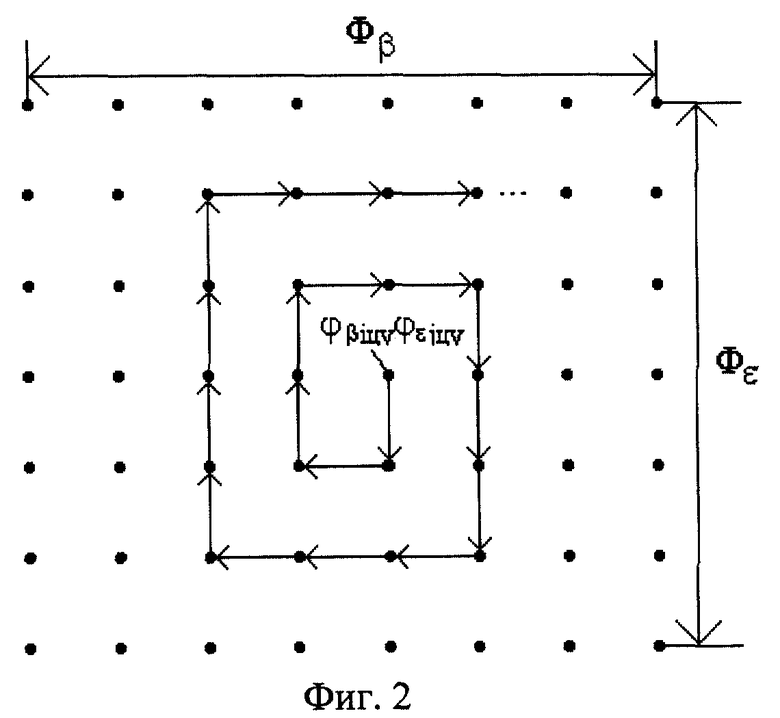
§18. Если на этой угловой позиции ДНА РКО не обнаружены, то следующую угловую позицию ϕ βiϕ ε j выбирают так, чтобы обзор пространства осуществлялся по спирали, показанной на фиг.2, в центре которой находится угловая позиция целеуказаний ϕ βiцуϕ ε jцу, и переходят к последующим тактам, выполняя последовательно §§17 и 18 до тех пор, пока не будут просмотрены все угловые позиции, или не произойдет обнаружение РКО. Если будут просмотрены все угловые позиции, что контролируется по наличию чисел в массиве М, то переходят к выполнению §16. Если на очередном такте при просмотре очередной угловой позиции ij обнаруживают РКО, то в дальнейшем порядок действий изменяют, переходя к выполнению действий, описанных в §§4-15, но в этом случае выбор очередной ячейки ij из массива М осуществляют так, чтобы обзор пространства выполнялся по спирали, показанной на фиг.2, в центре которой находится угловая позиция целеуказаний.
На фиг.1 показана ДН РЛС с размерами Θ β и Θ ε , площадь сечения которой плоскостью, перпендикулярной равносигнальному направлению ДНА, равна Sл. Заданная зона обзора РЛС определена плоскими углами Фβ и Фε . Площадь сечения заданной зоны обзора плоскостью, перпендикулярной равносигнальному направлению ДНА, равна Sзо. Символом Ω стр обозначена скорость перемещения ДНА по строке.
На фиг.2 точками условно показаны угловые позиции заданной области пространства, центром которой является угловая позиция целеуказаний ϕ βiцуϕ ε jцу, а стрелками - последовательность просмотра позиций.
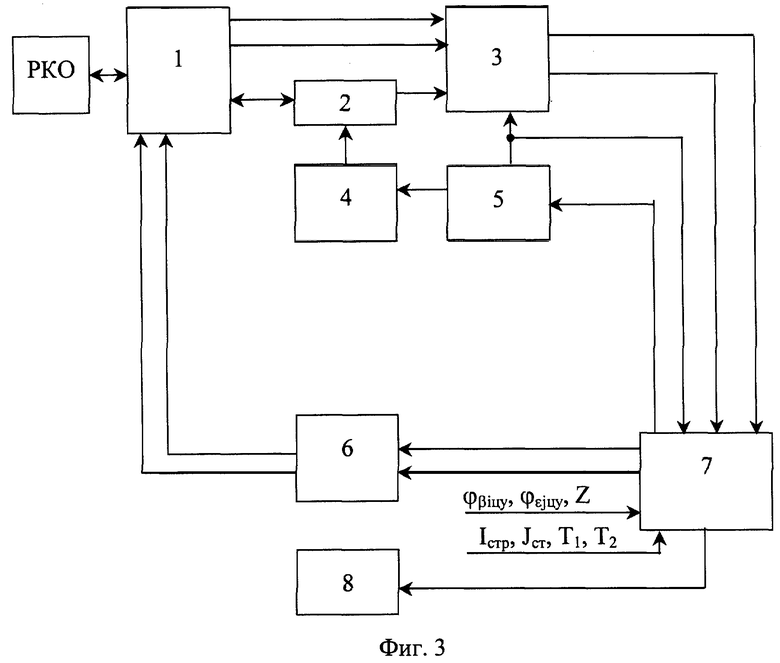
Для лучшего понимания предлагаемого способа как процесса выполнения действий над материальным объектом с помощью материальных средств и подтверждения возможности реализации заявленного изобретения на фиг.3 показана упрощенная структурная схема РЛС, в которой реализован заявленный способ обзора пространства, где:
1 - ФАР (фазированная антенная решетка, с входящими в ее состав моноимпульсным устройством суммарно-разностной обработки сигналов и приводом антенны);
2 - антенный переключатель;
3 - приемное устройство (ПРМ);
4 - передатчик;
5 - синхронизатор;
6 - устройство управления лучом ДНА;
7 - вычислитель с запоминающим устройством (ЗУ), в который от системы управления РЛС подают значения Icтр, Jст, T1, Т2, Z, ϕ βiцуϕ ε jцу;
8 - потребители информации;
РКО - радиоконтрастный объект.
За основу рассматриваемой РЛС взята РЛС, приведенная в [12].
В Приложении приведена блок-схема последовательности действий заявленного способа обзора пространства.
РЛС, в которой реализован заявленный способ обзора пространства, работает следующим образом.
Непосредственно перед началом обзора пространства из системы управления РЛС в ЗУ вычислителя 7 вводят: значения временных интервалов T1 и T2; значения Iстр и Jст, определяя тем самым заданный телесный угол, в котором будет осуществляться обнаружение РКО. В ЗУ вычислителя 7 отводят область памяти размером Iстр× Jст, называемую далее массивом М, где в каждой ячейке ij, расположенной на пересечении i-ой строки и j-го столбца, записывают два действительных числа в соответствии с данными, приведенными в массиве М (3).
Обзор пространства начинают с проверки в вычислителе 7 значения признака Z: если Z=0, то переходят к выполнению действий, начиная с описанных ниже в §1, если Z=1, то выполняют действия, начиная с описанных ниже в §16.
§1. В ЗУ вычислителя 7 проверяют наличие чисел в массиве М - в случае их отсутствия его заполняют действительными числами.
§2. Из ЗУ вычислителя 7 из одной случайным образом выбранной ячейки ij массива М считывают два числа, которые удаляют из этого массива, и передают их в устройство управления 6 лучом ДНА, где, в соответствии с этими числами, которые интерпретируются в нем как заданные угол места и азимут луча ДНА, формируют сигналы управления лучом ФАР в угломестной и азимутальной плоскостях, которые подают в ФАР 1. С помощью ФАР 1, в соответствии с этими сигналами управления, выставляют луч ДНА в выбранное направление.
В ЗУ вычислителя 7 считывают значение временного интервала T1 и передают его в синхронизатор 5. Синхронизатор 5 запускает передатчик 4, который в течение временного интервала T1 формирует сверхвысокочастотный (СВЧ) сигнал, передаваемый через антенный переключатель 2 в ФАР 1 и излучаемый ей в пространство. ФАР 1 принимает отраженные с этого направления сигналы, селектирует их и формирует известным способом суммарный и два разностных сигнала. Суммарный сигнал через антенный переключатель 2, а разностные сигналы напрямую передают из ФАР 1 в ПРМ 3. В ПРМ 3 эти сигналы усиливают, преобразуют в цифровую форму и передают в вычислитель 7, где их фильтруют от шумов и по ним обнаруживают РКО.
§3. Если в вычислителе 7 на этой угловой позиции ДНА РКО не обнаружены, то на каждом последующем такте последовательно выполняют действия, описанные в §§ 1 и 2.
§4. Если на очередном такте при просмотре очередной угловой позиции в вычислителе 7 произошло обнаружение РКО, то по принятым сигналам в вычислителе 7 осуществляют измерение дальности Д1 до РКО, скорости сближения Vсб1 с ним и его пеленгов ϕ βi1 и ϕ εj1. Измеренные значения Д1, Vсб1, ϕ βi1 и ϕ εj1 запоминают в ЗУ.
§5. После этого в ЗУ вычислителя 7 проверяют наличие чисел в массиве М - в случае их отсутствия его заполняют, как и ранее, действительными числами.
§6. В ЗУ вычислителя 7 из одной случайным образом выбранной ячейки ij массива М считывают два числа, которые удаляют из этого массива, и передают их в устройство управления 6 лучом ДНА, где в соответствии с этими числами формируют сигналы управления лучом ФАР в угломестной и азимутальной плоскостях, которые подают в ФАР 1 и выставляют луч ДНА в заданном направлении.
В ЗУ вычислителя 7 считывают значение временного интервала t1 и передают его в синхронизатор 5. Синхронизатор 5 запускает передатчик 4, который в течение временного интервала t1 формирует СВЧ-сигнал, который передают через антенный переключатель 2 в ФАР 1 и излучают в пространство. ФАР 1 принимает отраженные с этого направления сигналы, селектирует их и формирует суммарный и два разностных сигнала. Суммарный сигнал через антенный переключатель 2, а разностные сигналы напрямую передают из ФАР 1 в ПРМ 3, где их усиливают, преобразуют в цифровую форму и передают в вычислитель 7, где их фильтруют от шумов и по ним осуществляют обнаружение РКО.
§7. Далее, если РКО обнаружен, то выполняют действия, описанные в §8, в противном случае - выполняют действия, описанные в §9.
§8. В вычислителе 7 по принятым сигналам, осуществляют измерение дальности Д2 до второго РКО, скорости сближения Vсб2 с ним и его пеленгов ϕ βi2 и ϕ εj2. Измеренные значения Д2, Vcб2, ϕ βi2 и ϕ εj2 запоминают в ЗУ.
§9. Из ЗУ вычислителя 7 считывают числа, соответствующие угловой позиции ϕ βi1 и ϕ εj1, то есть те, где был обнаружен первый РКО, и передают их в устройство управления 6 лучом ДНА, где в соответствии с этими числами формируют сигналы управления лучом ФАР в угломестной и азимутальной плоскостях, которые подают в ФАР 1 и выставляют луч ДНА в заданном направлении.
Из ЗУ вычислителя 7 считывают значение временного интервала Т2 и передают его в синхронизатор 5, запускающий передатчик 4, который в течение временного интервала Т2 формирует СВЧ-сигнал, который передают через антенный переключатель 2 в ФАР 1 и излучают в пространство. ФАР 1 принимает отраженные с этого направления сигналы, селектирует их и формирует суммарный и два разностных сигнала, которые передают из ФАР 1 в ПРМ 3, где их усиливают, преобразуют в цифровую форму и передают в вычислитель 7. В вычислителе 7 сигналы фильтруют от шумов и по ним более точно измеряют Д1, Vcб1, ϕ βi1 и ϕ εj1, а также измеряют угловые скорости линии визирования РКО ω βi1 сори в азимутальной и ω εj1 в угломестной плоскостях. Измеренные значения Д1, Vсб1, ϕ βi1, ϕ εj1, ω βрi1 и ω εj1 запоминают в ЗУ вычислителя 7, а также передают потребителям информации 8.
Кроме этого в вычислителе 7 вычисляют период Тобсm обслуживания m-го PKO по формуле (4), и вычисляют время toбcm его очередного обслуживания по формуле (5).
Значение toбcm и Тобсm запоминают в ЗУ вычислителя 7. §10. В вычислителе 7 проверяют: был или не был обнаружен PKO на предыдущем такте. Если PKO был обнаружен, то выполняют действия, описанные в §11, в противном случае, переходят к выполнению действий, описанных в §12.
§11. Из ЗУ вычислителя 7 считывают числа, соответствующие угловой позиции ϕ βim и ϕ ε1jm m-ого PKO, то есть той, где был обнаружен m-ый PKO на предыдущем такте, и передают их в устройство управления 6 лучом ДНА, где в соответствии с этими числами формируют сигналы управления лучом ФАР, по которым в ФАР 1 выставляют луч ДНА в заданном направлении.
Из ЗУ вычислителя 7 считывают значение временного интервала T2 и передают его в синхронизатор 5, запускающий передатчик 4, который в течение временного интервала Т2 формирует СВЧ-сигнал, который передают через антенный переключатель 2 в ФАР 1 и излучают в пространство. ФАР 1 принимает отраженные с этого направления сигналы, по которым, как и ранее, после преобразований осуществляют более точное измерение Дm, Vcбm, ϕ βim, ϕ εjm, ω βim и ω εjm, которые запоминают в ЗУ вычислителя 7. Кроме этого, измеренные значения Дm, Vсбm, ϕ βim, ϕ εjm, ω βim и ω εj передают потребителям информации 8.
В вычислителе 7 по формуле (4) вычисляют период Тобсm обслуживания m-ого РКО, по которому по формуле (5) вычисляют время tобсm очередного обслуживания данного РКО.
Значения toбcm и Тобсm запоминают в ЗУ вычислителя 7.
§12. В вычислителе 7 сравнивают значение текущего времени tтек с временем tобсm очередного обслуживания m-го РКО. Если наступило время обслуживания m-ых РКО, т.е. tтек>tобсm, то для каждого из них выполняют действия, описанные в §13, в противном случае переходят к выполнению действий, описанных в § 14.
§13. В вычислителе 7 по формуле (6) вычисляют временной интервал Δ T, прошедший после последнего обслуживания m-ого РКО. Здесь же по запомненным значениям ϕ βim, ϕ εjm, ω βim, ω εjm, и Δ T по формулам (7) определяют экстраполированное значение угловой позиции ϕ βimϕ эε jm m-го РКО и соответствующие ему числа этой угловой позиции, которые передают в устройство управления 6 лучом ДНА, где, в соответствии с этими числами, формируют сигналы управления лучом ФАР, по которым в ФАР 1 выставляют луч ДНА в заданном направлении.
Из ЗУ вычислителя 7 считывают значение временного интервала Т1 и передают его в синхронизатор 5, запускающий передатчик 4, который в течение временного интервала Т1 формирует СВЧ-сигнал, передает его через антенный переключатель 2 в ФАР 1 и излучает в пространство. ФАР 1 принимает отраженные с этого направления сигналы, по которым, как и ранее после преобразований, в вычислителе 7 осуществляют более точное измерение Дm, Vcбm, ϕ βim, ϕ εjm, ω βim и ω εjm, которые запоминают в ЗУ вычислителя 7. Кроме этого, измеренные значения Дm, Vсбm, ϕ βim, ϕ εjm, ω βim и ω εj передают потребителям информации 8.
Также в вычислителе 7, как и ранее, вычисляют период Тобсm очередного обслуживания m-ого РКО и время toбcm очередного обслуживания данного РКО, значения которых запоминают в ЗУ вычислителя 7.
§14. С помощью вычислителя 7 в ЗУ проверяют наличие чисел в массиве М - в случае их отсутствия его, как и ранее, заполняют.
§15. Из ЗУ вычислителя 7 из одной случайным образом выбранной ячейки ij массива М считывают два числа, которые удаляют из этого массива, и передают их в устройство управления 6 лучом ДНА, где, в соответствии с этими числами, формируют сигналы управления лучом ФАР, по которым в ФАР 1 выставляют луч ДНА в заданном направлении..
Из ЗУ вычислителя 7 считывают значение временного интервала t1 и передают его в синхронизатор 5, запускающий передатчик 4, который в течение временного интервала T1 формирует СВЧ-сигнал, передает его через антенный переключатель 2 в ФАР 1 и излучает в пространство. ФАР 1 принимает отраженные с этого направления сигналы, по которым, как и ранее, в вычислителе 7 осуществляют обнаружение РКО.
После выполнения действий, описанных в §15, переходят к выполнению действий, описанных в §10, и процесс просмотра заданной зоны обзора начинают вновь, выполняя действия, описанные в §§10-15.
§16. С помощью вычислителя 7 считывают значения ϕ βiцуϕ ε jцу целеуказаний, подаваемые из системы управления РЛС на его вход, и в ЗУ формируют массив М размером Iстр× Jст, в центр которого записывают числа ij, соответствующие угловой позиции ϕ βiцуϕ ε jцу целеуказаний, а остальные ячейки заполняют так, чтобы влево и вверх относительно центра числа убывали, а вправо и вниз - возрастали с шагом 1.
§17. В вычислителе 7 из массива М считывают два числа, соответствующие угловой позиции ϕ βiцуϕ ε jцу, удаляют их из массива, а считанные числа передают в устройство управления 6 лучом ДНА, где, в соответствии с этими числами, формируют сигналы управления лучом ФАР в угломестной и азимутальной плоскостях, которые подают в ФАР 1. С помощью ФАР 1, в соответствии с этими сигналами управления, выставляют луч ДНА в направление ЦУ.
Из ЗУ вычислителя 7 считывают значение временного интервала T1 и передают его в синхронизатор 5, запускающий передатчик 4, который в течение временного интервала T1 формирует СВЧ-сигнал, передаваемый через антенный переключатель 2 в ФАР 1 и излучаемый ею в пространство. С помощью ФАР 1 принимают отраженные с этого направления сигналы и, после преобразования их в ней и в ПРМ 3, передают в вычислитель 7, где по ним осуществляют обнаружение РКО.
§18. Если на этой угловой позиции ДНА РКО не обнаружены, то с помощью вычислителя 7 из массива М следующие числа ij выбирают так, чтобы обзор пространства осуществлялся по спирали, показанной на фиг.2, в центре которой находится угловая позиция целеуказаний ϕ βiцуϕ ε jцу, и переходят к последующим тактам, выполняя последовательно пункты 17 и 18 до тех пор, пока не будут просмотрены все угловые позиции, или не произойдет обнаружение РКО. Если будут просмотрены все угловые позиции, что контролируется вычислителем 7 по наличию чисел в матрице М, то переходят к выполнению §16. Если на очередном такте при просмотре очередной угловой позиции ij обнаруживают РКО, то в дальнейшем порядок действий изменяют, переходя к выполнению действий, описанных в §4-15, но в этом случае выбор очередной ячейки ij из массива М осуществляют так, чтобы обзор пространства выполнялся по спирали, показанной на фиг.2, в центре которой находится угловая позиция целеуказаний.
Предлагаемый способ обзора пространства, по сравнению с прототипом, позволяет осуществлять обзор пространства, при котором обращение к каждому отдельному РКО осуществляется через рассчитанный для каждого РКО период. Кроме этого, за счет того, что после обнаружения РКО длительность зондирующего СВЧ-сигнала для измерения его координат увеличивается при заданном периоде обращения к нему, фактически для обнаруженного РКО реализуется режим непрерывного сопровождения при высокой точности оценивания его координат, соответствующей такому режиму.
Реализация заявленного способа не предъявляет дополнительных требований к радиолокационной системе, к блокам, входящим в ее состав, а также к быстродействию и объему памяти используемых в ней вычислителей.
Литература
1. Васильев О.В., Карев В.В. Управляемый радиолокационный поиск воздушных целей, оптимизированный по информационному критерию. -Радиотехника, 2000, №3, с.84-88.
2. Теребулин С.Ю., Юрчик И.А. Совместная оптимизация алгоритмов обзора пространства и процедур обработки радиолокационной информации. -Радиотехника, 1996, №10, с.71-75.
3. Татарский Б.Г., Романенко Г.С., Дыморец Р.З. Оптимизация процедуры обзора пространства радиолокационной системой на основе методов искусственного интеллекта. - Радиотехника, 1998, №4, с.87-91.
4. Василевич Л.Ф., Ежов С.А. Управление обзором локационных средств в режиме поиска и обнаружения целей. - Радиоэлектроника, 1993, №9.
5. Розанов Б.А., Форштер А.А. Оптимальное управление обзором при старении приобретаемой информации. - Радиотехника и электроника, 1973, т. 18, №6.
6. Морозов И.А., Сныткин Ю.В. Управление радиолокационными наблюдениями по информационному критерию. - Радиоэлектроника, 1993, №9.
7. Кулебаев А.М., Синдлер Ю.Б. О некоторых свойствах последовательных многоканальных процедур поиска. - Радиотехника и электроника, 1983, т. 28, №10.
8. Бухалева Л. В., Кулебаев А. М., Синдлер Ю. Б. О процедуре многоканального двухэтапного поиска сигнала с когерентным накоплением на этапах. - Радиотехника и электроника, 1989, т. 34, №5.
9. Васильев О.В., Меркулов В.И., Карев В.В. Управляемый радиолокационный поиск воздушных целей. - Зарубежная радиоэлектроника. Успехи современной радиоэлектроники. 2002, №1.
10. Патент РФ №2052834, МКИ6 G 01 S 13/00. Опубликован 20.01.96.
11. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. - М.: Радио и связь, 1997.
12. Патент США №5014064, кл. G 01 S 13/00 или 342-152, 07.05.1991.
13. Тузов Г.И., Сивов В.А., Прытков В.И., и др. Помехоустойчивость радиосистем со сложными сигналами/Под ред. Г.И.Тузова. - М.: Радио и связь, 1985, с.142-164.
14. Патент RU №2052834, кл. G 01 S 13/00, 20.01.1996.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ | 2003 |
|
RU2249232C2 |
| СПОСОБ ЗОНДИРОВАНИЯ КОНТРОЛИРУЕМОГО ПРОСТРАНСТВА РАДИОЛОКАЦИОННОЙ СИСТЕМОЙ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2009 |
|
RU2408032C2 |
| Способ мониторинга пространства | 2023 |
|
RU2816986C1 |
| Способ хаотического обзора пространства в оптической локационной системе | 2016 |
|
RU2626245C1 |
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА, ОБЛУЧАЕМОГО ВНЕШНИМИ ИСТОЧНИКАМИ ИЗЛУЧЕНИЯ, И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285939C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ ОТ ПАССИВНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2237906C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И АНАЛИЗА РАДИОСИГНАЛОВ | 2005 |
|
RU2296349C9 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
Изобретение относится к радиолокации и заключается в том, что область пространства, в которой осуществляют поиск радиоконтрастных объектов (РКО), задают в виде телесного угла, разделенного на N угловых позиций. Проверяют наличие целеуказаний об угловой позиции, где предположительно находится РКО - если их нет, то выбор очередной угловой позиции для просмотра из заданной области осуществляют случайным образом, в противном случае так, чтобы просмотр области выполнялся по спирали, в центре которой находится угловая позиция целеуказаний. Если целеуказаний нет, то луч антенны направляют в случайно выбранную угловую позицию и в ней осуществляют обнаружение РКО. Если РКО не обнаруживают, то случайным образом выбирают следующую угловую позицию и в ней осуществляют обнаружение РКО и т.д. до тех пор, пока не будет обнаружен РКО. После обнаружения РКО измеряют дальность до него, скорость сближения с ним и его пеленги, которые запоминают. Также вычисляют интервал времени, через который будет осуществлена локация угловой позиции, где по расчетам будет находиться данный РКО. После этого продолжают просмотр следующих угловых позиций. После того, как будет установлено, что наступило время обслуживания очередного обнаруженного РКО, луч антенны направляют в угловую позицию, где по расчетам должен находиться этот РКО и осуществляют локацию этой угловой позиции, причем в этом случае время локации увеличивают. За счет того, что время локации увеличивается, точность измерения координат РКО приближается фактически к точности режима непрерывного сопровождения, тем самым реализуется режим дискретного сопровождения РКО. В случае наличия целеуказаний изменяется лишь логика выбора очередной угловой позиции, по которой просмотр заданной области выполняют по спирали, в центре которой находится угловая позиция целеуказаний. Достигаемым техническим результатом является возможность динамического управления очередностью зондирования угловых направлений. 3 ил.
Способ обзора пространства в радиолокационной системе с фазированной антенной решеткой, заключающийся в том, что область пространства, в которой осуществляют поиск, обнаружение и сопровождение радиоконтрастных объектов (РКО), задают в виде значений телесного угла Фβ Фε , где Фβ и Фε - размеры этого угла соответственно по азимуту и углу места, которые запоминают, делят этот телесный угол на N угловых позиций луча диаграммы направленности антенны (ДНА), количество которых определяют по формуле
где Sзо и Sзл - площадь зоны обзора и площадь луча ДНА соответственно;
К=1, 2... 1,6 - коэффициент перекрытия,
положение угловой позиции ϕ βiϕ ε j ДНА задают i-м азимутом ϕ βi и j-м углом места ϕ εj луча ДНА, где


а

количество строк и столбцов соответственно в заданной зоне обзора, в соответствии с количеством угловых позиций N=Iстр·Jст создают и запоминают массив М угловых позиций, размером Iстр·Jст, следующего вида
где в каждой ячейке ij, расположенной на пересечении i-й строки и j-го столбца, записывают два действительных числа, первое из которых (от 1 до Iстр c шагом 1) определяет номер угловой позиции по углу места ϕ βi, а второе (1 до Jcт c шагом 1) - по азимуту ϕ βj1, цикл обзора заданного телесного угла, в течение которого будет осуществлен просмотр всех N его угловых позиций разбивают на такты, причем количество тактов не фиксируют, а последним в цикле считают тот такт, в котором просмотрена последняя угловая позиция, что определяют по факту отсутствия чисел в массиве М, задают временной интервал Т1, в течение которого осуществляют зондирование угловой позиции ϕ βiϕ ε j исходя из времени, необходимого для обнаружения РКО с заданной вероятностью на максимальной дальности действия РЛС, временной интервал Т2=3Т1, в течение которого осуществляют зондирование угловой позиции, на которой произошло обнаружение РКО, признак наличия целеуказаний Z, значение которого равно 1, при наличии целеуказаний, и 0 - при их отсутствии, по значению признака Z проверяют: есть или отсутствуют целеуказания об угловой позиции ϕ βiцуϕ ε jцу, если Z=0, то выполняют действия, описанные ниже в § § 1-15, если Z=1, то выполняют действия описанные в § § 16-18, § 1) проверяют наличие чисел в массиве М - в случае их отсутствия его заполняют действительными числами, § 2) из одной, случайным образом, выбранной, ячейки ij массива М считывают два числа, которые используют для задания положения угловой позиции ϕ βiϕ ε j ДНА, а сами числа из массива удаляют, луч ДНА направляют в эту угловую позицию, в течение времени Т1 излучают радиосигналы, принимают отраженные радиосигналы с этого направления и по принятым радиосигналам осуществляют обнаружение РКО, § 3) если на этой угловой позиции ДНА РКО не обнаружены, то переходят к последующим тактам, выполняя последовательно § § 1 и 2, если при просмотре очередной угловой позиции ij обнаруживают РКО, то в дальнейшем порядок действий изменяют, переходя к выполнению действий, начиная с описанных в § 4, § 4) по принятым отраженным сигналам, после обнаружения РКО, осуществляют измерение дальности Д1 до РКО, скорости сближения Vсб1 с ним и его пеленгов ϕ βi 1 и ϕ εj1, которые запоминают, § 5) проверяют наличие чисел в массиве М - в случае их отсутствия, как и ранее, заполняют действительными числами, § 6) повторяют последовательность действий, описанных в § 3, § 7) если РКО обнаружен, то выполняют действия, описанные в § 8, в противном случае выполняют действия, описанные в § 9, § 8) по принятым отраженным сигналам осуществляют измерение дальности Д2 до второго РКО, скорости сближения Vсб2 с ним и его пеленгов ϕ βi2 и ϕ εj2, которые запоминают, § 9) луч ДНА направляют в угловую позицию ϕ βi1 и ϕ εj1, где был обнаружен первый РКО, в эту угловую позицию излучают радиосигналы и принимают отраженные радиосигналы в течение временного интервала Т2, по принятым отраженным от РКО радиосигналам вновь измеряют Д1, Vсб1, ϕ βi1 и ϕ εj1, а также измеряют угловые скорости линии визирования ω βi1 и ω εj1 РКО соответственно в азимутальной и в угломестной плоскостях, измеренные значения Д1, Vсб1, ϕ βi1,ϕ εj1, ω βi1, ω εj1 запоминают и передают их потребителям информации, а также вычисляют период обслуживания m-го РКО Тобсm (для первого РКО m=1, для второго m=2 и т.д.) - интервал времени, через который луч ДНА направляют на ту угловую позицию, где по расчетам находится m-й РКО, по рассчитанному периоду обслуживания Тобсm m-го РКО определяют время его очередного обслуживания tобсm по формуле

где tтек - текущее время,
значения tобсm и Тобсm запоминают,
§ 10) проверяют: был ли обнаружен РКО на предыдущем такте - если РКО был обнаружен, то выполняют действия, описанные в § 11, в противном случае - описанные в § 12, § 11) луч ДНА направляют в угловую позицию ϕ βimϕ ε jm, где был обнаружен m-й РКО на предыдущем такте, излучают радиосигналы и принимают отраженные радиосигналы в течение временного интервала Т2, по принятым радиосигналам измеряют Дm, Vсбm, ϕ βim, ϕ εjm, ω βim, 4/ω εjm, которые запоминают, а также передают потребителям информации, вычисляют период Тобсm обслуживания РКО и время tобсm его очередного обслуживания по формуле (4), которые запоминают, § 12) сравнивают значение текущего времени tтек с временем tобсm очередного обслуживания m-го РКО - если наступило время обслуживания m-х РКО, то для каждого из них выполняют действия, описанные в § 13, в противном случае - описанные в § 14, § 13) вычисляют временной интервал Δ Т, прошедший после последнего обслуживания m-го РКО по формуле

по запомненным значениям ϕ βim, ϕ εjm, ω βim, ω εjm и вычисленному значению Δ Т определяют экстраполированное значение угловой позиции m-го РКО ϕ эβ im, ϕ эε jm по формулам


луч ДНА направляют в угловую позицию ϕ эβ imϕ эε jm, где по расчетам находится m-й РКО, излучают радиосигналы и принимают отраженные радиосигналы в течение временного интервала Т2, по которым измеряют Дm, Vсбm, ϕ βim,ϕ εjm, ω βim и ω εjm, запоминают их, а также передают потребителям информации, вычисляют период Тобсm обслуживания данного РКО, и время tобсm его очередного обслуживания tобсm, которые запоминают, § 14) повторяют действия, описанные в § 1, § 15) повторяют действия, описанные в § 2, после выполнения действий, описанных в § 15, переходят к выполнению действий описанных в § 10 и процесс просмотра заданной зоны обзора продолжают в течение заданного времени, выполняя действия § § 10-15, § 16) в центр массива М записывают числа ij, соответствующие угловой позиции ϕ βiцу, ϕ εjцу целеуказаний, а остальные ячейки заполняют так, чтобы влево и вверх относительно центра числа убывали, а вправо и вниз - возрастали с шагом 1, считывают два числа, соответствующие угловой позиции ϕ βiцу, ϕ εjцу, и удаляют их из массива числа, § 17) луч ДНА направляют в угловую позицию ϕ βiцу, ϕ εjцу, в течение времени Т1 излучают радиосигналы, принимают отраженные радиосигналы с этого направления, по принятым радиосигналам осуществляют обнаружение РКО, § 18) если на этой угловой позиции ДНА РКО не обнаружены, то следующую угловую позицию ϕ βiϕ ε j выбирают такую, чтобы обзор пространства осуществить по спирали, в центре которой находится угловая позиция целеуказаний ϕ βiцуϕ ε jцу, и выполняют последовательно действия § § 17 и 18 до тех пор, пока будут просмотрены все угловые позиции, или произойдет обнаружение РКО, после просмотра всех угловых позиций, контролируемого по отсутствию чисел в матрице М, выполняют § 16, причем если обнаруживают РКО, то выполняют действия § § 4-15, выбирая очередную ячейку ij из массива М в соответствии с § 18, и просмотр заданной зоны обзора продолжают в течение заданного времени.
| Зарубежная радиоэлектроника | |||
| Успехи современной радиоэлектроники, 2002, №1, с.50 и 51 | |||
| СПОСОБ ОБЗОРА ВОЗДУШНОГО ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ПЛОСКИМИ ЛУЧАМИ ДИАГРАММ НАПРАВЛЕННОСТИ АНТЕНН | 1996 |
|
RU2117313C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ САМОЛЕТНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2001 |
|
RU2188436C1 |
| СПОСОБ ОПТИМАЛЬНОГО ДОСТУПА К АБДОМИНАЛЬНОМУ ОТДЕЛУ ПИЩЕВОДА ИММУНОДЕФИЦИТНЫХ МЫШЕЙ ПРИ ОРТОТОПИЧЕСКОЙ ТРАНСПЛАНТАЦИИ ФРАГМЕНТА ОПУХОЛИ ПИЩЕВОДА ЧЕЛОВЕКА | 2018 |
|
RU2709835C1 |
| Сошник пневматической сеялки | 1973 |
|
SU490423A1 |
| US 4292635 А, 29.09.1981. | |||
