Изобретение относится к области радиопеленгации и предназначено для измерения пространственно-частотного распределения систематической ошибки пеленгования (СОП) в ходе испытаний, экспериментальных исследований, эксплуатации радиопеленгаторных систем (РИС).
Известен динамический способ измерения пространственно-частотного распределения СОП, предусматривающий размещение носителя РПС на вращающейся платформе и его облучение из одной точки тестовым источником радиоизлучения (ИРИ) одновременно на нескольких частотах, заданных с необходимой дискретностью, при этом на каждой частоте может быть получена временная диаграмма измеряемого значения пеленга, отражающая зависимость СОП от направления прихода радиоволны. (Динамический метод измерения пространственно-частотного распределения систематической ошибки пеленгования в ходе экспериментальных исследований радиопеленгаторных систем. А.А.Сирота и др. «Информационный конфликт в спектре электромагнитных волн». М.: «Радиотехника», 2003 г., №12, стр.19…20).
Недостатками данного способа являются:
- возникновение дополнительных ошибок измерения при усреднении измеряемого пеленга за счет вращения носителя РПС;
- наличие дополнительных ошибок измерения вызванных интерференцией переотраженных радиоволн от металлической поверхности вращающейся платформы (Современная радиоэлектронная борьба. Под ред. В.Г.Радзиевского, М.: «Радиотехника», 2006 г., стр.31…33);
- сложность конструкции вращающейся платформы и обеспечение электропитанием носителя РПС.
Наиболее близким к предлагаемому способу измерения по технической сущности и достигаемому положительному результату является способ измерения пространственно-частотного распределения СОП путем «обноса», предусматривающий многократное последовательное облучение РПС с различных направлений с помощью одного ИРИ тестовыми сигналами на различных частотах, задаваемых с равномерным шагом, что дает возможность на основе обработки результатов пеленгования ИРИ определить пространственно-частотное распределение СОП в виде таблиц «девиационных поправок». (Динамический метод измерения пространственно-частотного распределения систематической ошибки пеленгования в ходе экспериментальных исследований радиопеленгаторных систем. А.А.Сирота и др. «Информационный конфликт в спектре электромагнитных волн». М.: «Радиотехника», 2003 г., №12, стр.19…20).
Недостатком данного способа является длительная процедура измерения пространственно-частотного распределения СОП за счет «обноса» одного ПРИ с различных направлений на РПС и многократного облучения его тестовым сигналом с подготовительными операциями до 3 час.
Технический результат предлагаемого изобретения заключается в сокращении времени проведения измерения пространственно-частотного распределения СОП при сохранении точностных характеристик измерения.
Технический результат достигается тем, что в известном способе измерения пространственно-частотного распределения систематической ошибки пеленгования, включающем облучение радиопеленгаторной системы с разных направлений тестовыми сигналами на различных частотах, задаваемых с равномерным шагом, определения пеленгов на данные направления и вычисления систематических ошибок пеленгования радиопеленгаторную систему облучают одновременно A-тестовыми сигналами вида  с соответствующих направлений - α=1,2…A длительностью - T
j, частоты - ω
i которых с каждым последующим циклом измерения - j=1,2…J изменяют свои значения дискретно, однозначно по всем направлениям до полной реализации множества частот, выделенных для измерения ω
i
∈{ω
1
; ω
2
…ω
J
}, за время T
Σ=J·T
j, определяют пеленги на данные направления и вычисляют систематические ошибки пеленгования, где t - текущее время.
с соответствующих направлений - α=1,2…A длительностью - T
j, частоты - ω
i которых с каждым последующим циклом измерения - j=1,2…J изменяют свои значения дискретно, однозначно по всем направлениям до полной реализации множества частот, выделенных для измерения ω
i
∈{ω
1
; ω
2
…ω
J
}, за время T
Σ=J·T
j, определяют пеленги на данные направления и вычисляют систематические ошибки пеленгования, где t - текущее время.
Способ реализует параллельно-последовательные измерения пространственно-частотного распределения СОП за время T Σ=J·T j, которое по сравнению со временем измерения в прототипе TΣ=J·Тj·А сокращается А раз.
Число циклов измерения пространственно-частотного распределения СОП определяется числом частот тестовых сигналов, выделенных для измерения J, и не зависит от числа направлений на УИРИ.
Длительность тестового сигнала устанавливают из необходимости накопления результатов измерения пеленга на одном известном направлении, необходимого для статистической обработки результатов T j =m·T n,
где m - число измерений пеленга на одном известном направлении;
T n - время пеленгования ИРИ является тактико-технической характеристикой РПС.
Тогда суммарное время измерения пеленгов на известные направления и на выделенных частотных каналах РПС составит T Σ =m·J·T n.
Заявленный способ позволяет измерить пространственно-частотное распределение СОП современных РПС за время 20…30 мин, включая подготовительные операции, в прототипе - до 3 часов.
За счет изменения длительности тестового группового сигнала (m=1, T=T n) способ позволит дополнительно измерить важную тактико-техническую характеристику РПС - время пеленгования ИРИ.
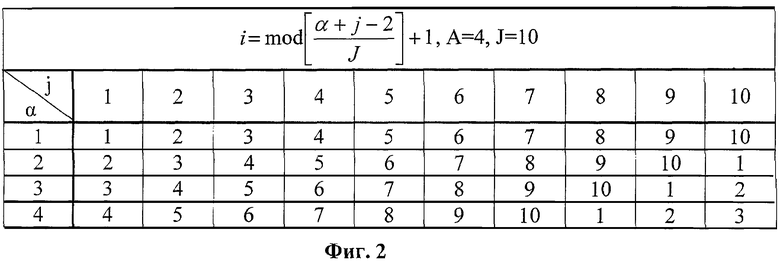
Однозначность значений частот - ω i облучаемых тестовых сигналов по всем направлениям α=1, 2…А определяется алгоритмом управления УИРИ

где mod[…] - остаток от деления.
Алгоритм (2) исключает одновременное облучение РПС с различных направлений одним и тем же групповым тестовым сигналом, не допускает образование многосигнального приема (на одной частоте) и не ухудшает точности пеленгования РПС.
Алгоритм (2) вычислен для случая А=4, J=10 и подтвержден практическим исследованием (фиг.2).
По результатам измеренных пеленгов - αн(ωi,) на УИРИ с известных направлений - α на частотах, предназначенных для измерения - ωi, определяют по известным формулам простанственно-частотное распределение СОП в виде таблицы «девиационных поправок» (М.Е.Старик, И.С.Кукес. Основы радиопеленгации. Л.: 1953 г., стр.250…253)

где  - среднее значение измеренного пеленга, град.
- среднее значение измеренного пеленга, град.
Компенсация СОП путем введения «девиационных поправок» повышает точность пеленгования реальных ИРИ.
Сопоставительный анализ заявленного решения с прототипом показывает, что предложенный способ отличается от известного наличием многопозиционных управляемых ИРИ, структурой тестовых сигналов и алгоритмом управления УИРИ, что позволяет использовать достоинства прототипа и устранить его недостатки.
По совокупности измерений пространственно-частотного распределения систематической ошибки пеленгования заявленный способ является параллельно-последовательный.
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными признаками заявленного способа, показали, что в общедоступных источниках информации они отсутствуют.
Из уровня техники также не подтверждена известность влияния отличительных признаков заявленного изобретения на указанный заявителем технический результат. Следовательно, заявленное изобретение соответствует условию «изобретательский уровень».
Предлагаемый способ промышленно применим, так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособности и воспроизводимости, а для реализации способа могут быть использованы известные материалы и оборудование.
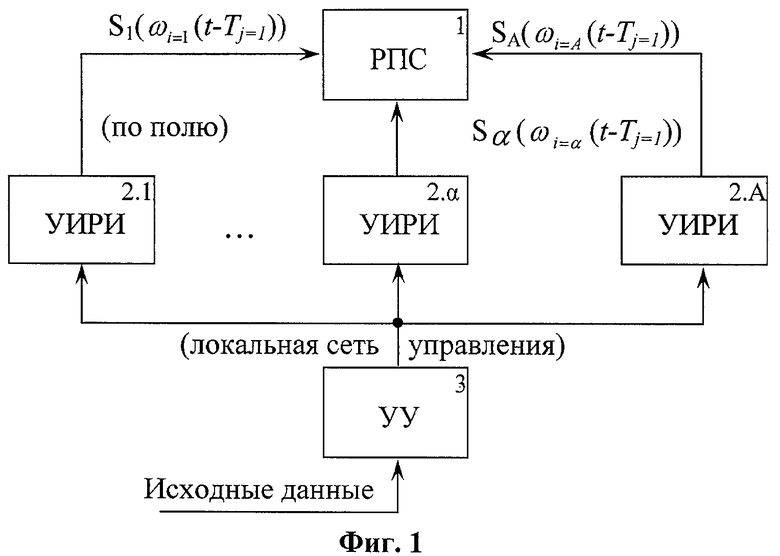
На фиг.1 приведена структурная схема системы, реализующей способ, на фиг.2 - таблица алгоритма изменения значений частот тестовых сигналов при А=4, J=10, на фиг.3 - внешний вид устройств системы, реализующей способ.
Система, реализующая данный способ (фиг.1), содержит радиопеленгаторную систему с программным модулем оценки и компенсации «девиационных поправок» 1, к входу которого по полю параллельно с известных направлений подключены выходы управляемых источников радиоизлучения (УИРИ) 2.1…2.А, управляющие входы которых дистанционно соединены с выходом устройства управления (УУ) 3, на вход которого вводят исходные данные.
В зависимости от назначения РПС 1 УИРИ 2.1…1.А равномерно, равноудалено (100 м) размещают на заранее известных направлениях по окружности или в рабочем секторе относительно РПС 1. Для оперативности испытаний УУ 3 размещают на рабочем месте оператора РПС 1.
Согласно предлагаемому способу измерения пространственно-частотного распределения СОП последовательность работы системы следующая.
1. В устройство управления 3 вводят исходные данные:
- α=1, 2…А - известные направления на УИРИ;
- ω i ∈{ω 1 ; ω 2 …ω J } - множество частот с равномерным шагом, выделенных для измерния;
- Т n - время пеленгования одного ИРИ;
- m - число измерений одного пеленга на ИРИ, необходимое для статистической обработки.
2. Алгоритм управления (2): УУ 3 преобразуется в цифровой управляющий сигнал и с помощью одноканальной локальной радиомодемной сети передается на УИРИ 2.1…2.4.
3. УИРИ 2.1…2.А реализуют излучения тестовых сигналов вида (1) с известных направлений.
4. РПС 1 производит измерение текущего пеленга на ИРИ, усредняя его, а с помощью программного модуля - оценку и компенсацию «девиационных поправок» по формулам (3).
Для практической реализации заявленного способа могут быть использованы известные материалы и узлы.
Современные РПС 1 имеют программные модули оценки и компенсации «девиационных поправок». УИРИ 2.1…2.А представляют управляемые радиопередатчики, способные формировать синхронные тестовые сигналы вида 1.
Устройство управления 3 выполнено на базе управляющей ПЭВМ (ноутбук) со специальным программным обеспечением и локальной радиомодемной сетью управления. Специальное программное обеспечение реализовано в соответствии с алгоритмом (2).
Система, реализующая предлагаемый способ, практически выполнена (фиг.3), а достижение технического результата подтверждено проведением натурного эксперимента.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2258941C1 |
| СПОСОБ ИМИТАЦИИ МНОГОПОЗИЦИОННОЙ РАДИОЭЛЕКТРОННОЙ ОБСТАНОВКИ | 2007 |
|
RU2326399C1 |
| СПОСОБ ВЫЯВЛЕНИЯ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ РАДИОВОЛНЫ ПРИ ПЕЛЕНГОВАНИИ | 2004 |
|
RU2300778C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2603356C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2327181C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ РАДИОИЗЛУЧАТЕЛЕЙ | 1993 |
|
RU2072524C1 |
| Способ автоматизированного контроля источников радиоизлучений | 2017 |
|
RU2659813C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |
| Способ определения координат источников радиосигналов с взаимно перекрывающимися спектрами | 2024 |
|
RU2834966C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2325666C2 |

Изобретение относится к области радиопеленгации и предназначено для измерения пространственно-частотного распределения систематической ошибки пеленгования (СОП) в ходе испытаний, экспериментальных исследований, эксплуатации радиопеленгаторных систем (РПС). Достигаемый технический результат изобретения - сокращение времени проведения измерения пространственно-частотного распределения СОП при сохранении точностных характеристик измерения. Технический результат достигается тем, что в известном способе измерения пространственно-частотного распределения систематической ошибки пеленгования, включающем облучение радиопеленгаторной системы с разных направлений тестовыми сигналами на различных частотах, задаваемых с равномерным шагом, определение пеленгов на данные направления и вычисление систематических ошибок пеленгования, радиопеленгаторную систему облучают одновременно А-тестовыми сигналами вида Sα(ωi, (t-Tj)) с соответствующих направлений - α=1, 2…А длительностью - Tj, частоты - ωi которых с каждым последующим циклом измерения j=1, 2,…J изменяют свои значения дискретно, однозначно по всем направлениям до полной реализации множества частот, выделенных для измерения ωi∈{ω1; ω2…ωJ}, за время TΣ=J·Tj, определяют пеленги на данные направления и вычисляют СОП, где t - текущее время. 3 ил.
Способ измерения пространственно-частотного распределения систематической ошибки пеленгования, включающий облучение радиопеленгаторной системы с разных направлений тестовыми сигналами на различных частотах, задаваемых с равномерным шагом, определение пеленгов на данные направления и вычисление систематических ошибок пеленгования, отличающийся тем, что радиопеленгаторную систему облучают одновременно A-тестовыми сигналами вида Sα(ωi,(t-Tj)) с соответствующих направлений α=1, 2…А, длительностью Tj, частоты ωi которых с каждым последующим циклом измерения j=1, 2,…J изменяют свои значения дискретно, однозначно по всем направлениям до полной реализации множества частот, выделенных для измерения ωi∈{ω1; ω2…ωJ}, за время TΣ=J·Tj, определяют пеленги на данные направления и вычисляют систематические ошибки пеленгования, где t - текущее время.
| Динамический метод измерения пространственно-частотного распределения систематической ошибки пеленгования в ходе экспериментальных исследований радиопеленгаторных систем | |||
| СИРОТА А.А | |||
| и др | |||
| Информационный конфликт в спектре электромагнитных волн | |||
| - М.: Радиотехника, 2003, №12, с.19, 20 | |||
| RU 2007146164 A, 20.06.2009 | |||
| СПОСОБ ИМИТАЦИИ МНОГОПОЗИЦИОННОЙ РАДИОЭЛЕКТРОННОЙ ОБСТАНОВКИ | 2007 |
|
RU2326399C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР СО СКВОЗНЫМИ ФАЗОВЫМИ КАНАЛАМИ | 2002 |
|
RU2232403C1 |
| US 7119739 B1, 10.10.2006. | |||

