Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству, способу и компьютерной программе для локализации представляющего интерес объекта у субъекта.
Уровень техники изобретения
В одном аспекте документа US 2006/184006 A1 описано устройство для построения виртуальной «карты-схемы» анатомической структуры сосудистой системы пациента для применения хирургом при проведении процедуры на сосудистых анатомических структурах пациента, причем устройство включает: виртуальную 3D модель анатомической структуры организма пациента, где виртуальная 3D модель включает виртуальную 3D структуру, представляющую структуру костной системы пациента и виртуальную 3D структуру, представляющую структуру сосудистой системы пациента, причем виртуальная 3D структура, представляющая структуру костной системы пациента, должным образом совмещена с виртуальной 3D структурой, представляющей структуру сосудистой системы пациента; флюороскоп для получения в реальном времени изображений костной системы пациента и хирургического устройства, используемого в процедуре; совмещающее устройство для помещения виртуальной 3D модели в должное совмещение с пространством в теле пациента, где размещен флюороскоп; устройство для вычитания маскировки изображения за счет костной ткани для (i) генерирования маскировки изображения за счет костной ткани вследствие наложения на изображение костной структуры и (ii) вычитания указанной маскировки изображения из полученных в реальном времени изображений, обеспечиваемых флюороскопом, для создания посредством этого модифицированных флюороскопических изображений без включения изображения костной структуры; и генерирующее изображение устройство для построения виртуальной «карты-схемы», где виртуальная «карта-схема» включает составное изображение, комбинирующее (i) изображения виртуальной 3D структуры, представляющей структуру сосудистой системы пациента, и (ii) модифицированные флюороскопические изображения, без включения костной структуры, где изображения виртуальной 3D структуры, представляющие структуру сосудистой системы пациента, находятся в должном совмещении с модифицированными флюороскопическими изображениями без включения костной структуры.
Конкретная область, в которой часто требуется локализовать представляющий интерес объект, подобный катетеру, у субъекта, например, в теле человека, представляет собой электрофизиологию (EP). Так, существует определенная связь между настоящим изобретением и сердечной электрофизиологией (EP), а конкретнее, между процедурами деструкции ткани под рентгеновским контролем и размещением электростимулятора.
Для автоматической локализации EP катетеров в 3D (трехмерной пространственной системе координат) (например, для электроанатомического или деструкционного картирования), может быть необходимым проследить их ход на двумерных рентгеновских изображениях и экстраполировать 3D положение по данным 2D (двумерного изображения). Примеры такого подхода включают: прослеживание на двух одновременно полученных изображениях стерео или двухплоскостной рентгеновской системой, как описано в патенте США № 7050844, с тем, чтобы 3D положение можно было вывести из видов под двумя углами.
Однако прослеживание хода EP катетера на 2D рентгеновских изображениях в общем случае затруднено по нескольким причинам, включая следующие.
Для обеспечения возможности визуализации в реальном времени без воздействия избыточного количества радиации на пациента доза рентгеновского облучения при получении флюороскопических изображений в целом низкая, и, таким образом, качество изображения низкое.
Многие объекты, которые видны на флюороскопическом изображении, могут быть ошибочно приняты за EP катетеры (например, отведения и накладки ЭКГ, швы, инъекционные катетеры и т.д.).
Ряд EP катетеров могут использоваться одновременно (например, для картирования катетеров различных форм, деструкционного катетера и опорных катетеров), но ход не всех из них необходимо прослеживать, хотя они могут мешать прослеживанию хода катетеров, представляющих особый интерес.
Таким образом, поскольку обычно во время электрофизиологических процедур используются катетеры различных типов и форм (например, опорные, картирующие или деструкционные), то присутствуют дополнительные объекты, которые можно спутать с катетерами, и качество получаемых флюороскопических изображений достаточно низкое, и классические способы выявления и прослеживания хода, вероятно, не смогут правильно уловить представляющий(ие) интерес объект(ы).
Краткое описание сущности изобретения
Целью настоящего изобретения является предоставление устройства, способа и компьютерной программы, которые позволяют локализовать представляющий интерес объект у субъекта, которые являются более совершенными с точки зрения чувствительности для получения качественного изображения, выявления дезориентирующих и/или вызывающих помехи объектов. Предпочтительно, настоящее изобретение предоставляет средство для обеспечения более точной локализации без увеличения усилия, необходимого для обработки изображения или обеспечения желательной точности локализации при сниженной потребности в ресурсах, подобных мощности компьютера или времени расчетов.
В первом аспекте настоящего изобретения предоставлено устройство для локализации представляющего интерес объекта у субъекта, которое включает в себя блок совмещения для совмещения трехмерного отображения субъекта, которое включает множество сегментов, соответствующих множеству структурных областей субъекта с двумерным изображением, причем блок совмещения выполнен с возможностью определения множества зон в изображении, соответствующих множеству сегментов, так что, по меньшей мере, одна зона из множества зон связана с соответствующей областью из множества областей; и блок локализации для локализации объекта, причем блок локализации выполнен с возможностью извлечения индикации объекта из изображения путем обработки изображения, обработка изображения ограничена зоной объекта из множества зон, которая связана с заданной областью объекта.
В еще одном аспекте настоящего изобретения, представлен способ локализации представляющего интерес объекта, включающий в себя этапы, на которых: совмещают трехмерное отображение субъекта, которое включает в себя множество сегментов, соответствующих множеству структурных областей субъекта с двумерным изображением, посредством этого, определяя множество зон на изображении, соответствующих множеству сегментов, так что, по меньшей мере, одна зона из множества зон связана с соответствующей областью из множества областей; и локализуют объект извлечением индикации объекта из изображения путем обработки изображения, причем обработка изображения ограничена зоной объекта из множества зон, которая связана с заданной областью объекта.
В еще одном аспекте настоящего изобретения представляется компьютерная программа, включающая средство в виде кода программы, которая вызывает выполнение компьютером этапов способа в соответствии с изобретением, причем указанная компьютерная программа выполняется компьютером.
В контексте электрофизиологии по настоящему изобретению используется анатомическая информация, полученная по 3D скану тела пациента для содействия пространственной локализации EP катетеров на флюороскопических изображениях и отсортировки большинства не представляющих интерес объектов и структур для осуществления более эффективного автоматического выявления, прослеживания хода и мечения катетера.
Изобретение основано, например, на понимании того, что 3D модель анатомии сердца (в качестве примера трехмерного отображения субъекта) может быть совмещена с 2D флюороскопическим изображением (являющемся конкретным примером двумерного изображения), где сегментация сердца (обеспечиваемая трехмерной моделью), спроецированная на двумерное рентгеновское изображение, ограничивает представляющие интерес области для различных анатомических частей. Такую идентификацию представляющих интерес областей можно затем использовать для содействия выявлению и прослеживанию хода представляющего интерес объекта, связанного с представляющей интерес областью, например, инструмента для вмешательства, такого как катетер, на последовательности двумерных флюороскопических изображений, при условии, что представляющий интерес объект располагается в известной анатомической структуре, т.е., в представляющей интерес области.
Извлеченную индикацию объекта можно получить различными средствами. Одна возможность состоит в том, что индикация указывает лишь на положение объекта (например, центральной точки или другого заданного признака объекта). Другая возможность состоит в том, что индикация включает информацию о контурах объекта или составлена контурами, которые могут, например, быть выделены на изображении. Далее, индикация может представлять собой сегментацию или суб-изображение изображения, показывающего объект. Кроме того, индикация может также включать комбинации некоторых или всех из указанных выше возможностей.
Примеры полезного осуществления настоящего изобретения могут включать следующие:
Во время процедуры, связанной с мерцательной аритмией (AF) выявление катетеров для картирования и деструкции может облегчаться отсортировкой всех объектов, выявленных вне проекции релевантной области, например, вне левого предсердия.
Отведения электростимулятора могут дифференцироваться от других катетеров (или автоматическим метиться) путем использования того обстоятельства, что они не отходят от одной и той же анатомической структуры (т.е., структурной области).
После завершения 2D-3D совмещения в данном виде, все изменения геометрии рентгеновской системы могут накладываться на матрицу совмещения. Путем такой адаптации, проецируемые области, представляющие интерес, всегда удерживаются согласованно с рентгеновским изображением, т.е., сохраняется правильная связь между сегментами трехмерного отображения и зонами двумерного изображения, показывающая соответствующие структурные области.
Предпочтительно, в частности, в контексте использования настоящего изобретения в целях EP, 3D данные регистрируются с 2D рентгеновскими изображениями так, что соответствующая проекция объема близко уравнивается с 2D изображениями. Это дает положение пациента в 3D пространстве рентгеновской системы и, посредством этого, всех анатомических структур, которые могут сегментироваться в 3D объеме. Например, автоматическое выявление опорного катетера в коронарном синусе может быть ограничено проекцией этой анатомической области на флюороскопическое изображение, которое представляет собой очень ограниченную область на виде спереди. Может осуществляться более детальный расчет, потому что область поиска уменьшается, и все другие катетеры, даже очень похожие, могут отсортировываться по той простой причине, что они находятся в другой анатомической области.
Настоящее изобретение иллюстрируется и объясняется в настоящем описании, в частности, ссылкой на осуществление в контексте электрофизиологии. Однако следует отметить, что настоящее изобретение не ограничивается только областью электрофизиологии. Настоящее изобретение также с пользой применимо в других областях, подобных, например, размещению стентов и минимально инвазивным хирургическим вмешательствам (например, игольной биопсии, радиочастотной деструкции). Кроме того, настоящее изобретение может также использоваться в не медицинском контексте, например, в технических областях, относящихся к робототехнике.
Хотя особенно полезный аспект настоящего изобретения связан с медицинской сферой и обеспечивает подспорье для медицинских работников во время инвазивных процедур вмешательств, субъект, у которого локализуется представляющий интерес объект, не ограничивается телом человека или животного. Таким образом, структурные области, которым соответствуют сегменты совмещения, могут включать, но необязательно ограничиваются анатомическими областями или структурами тела.
Кроме того, множество сегментов может охватывать или не охватывать весь субъект или часть субъекта. Например, трехмерное отображение может включать сегменты только для определенных областей субъекта, например, только сегменты, соответствующие определенным элементам сердца. Тем не менее, даже в случае, когда предоставляется только один конкретный сегмент, например, сердца, он может рассматриваться как представляющий собой множество сегментов, включая первый сегмент, соответствующий сердцу, и дополнительный к первому сегменту второй сегмент, соответствующий остальному телу.
Кроме того, сегментация может также быть не исключающей, т.е., различные сегменты могут частично соответствовать одним и тем же структурным областям. Например, может быть предоставлен сегмент, соответствующий кругу кровообращения, и другой сегмент, соответствующий грудной клетке. Кроме того, сегмент может включать один или несколько дополнительных субсегментов, которые, в свою очередь, могут перекрывать или включать другие сегменты, например, сегмент, соответствующий кругу кровообращения, включающему субсегмент, соответствующий сердцу или определенной вене (области).
Для достижения благоприятного эффекта, трехмерное отображение необязательно должно быть совершенным или точным отображением субъекта, поскольку может использоваться даже аппроксимирующее отображение, проявляющее определенную степень ошибки между сегментацией и структурными областями субъекта. То же справедливо для совмещения отображения и изображения. Однако чем точнее отображение и совмещение, тем более точная обработка ограничения изображения может быть обеспечена.
В соответствии с предпочтительным аспектом настоящего изобретения, устройство, дополнительно включает в себя интерфейс, выполненный с обеспечением возможности выбора пользователем из множества областей субъекта целевой области в качестве заданной целевой области. Предпочтительно, устройство обеспечивает возможность более многостороннего определения области или областей и соответствующей зоны или зон объекта, которыми ограничивается обработка изображения, с целью локализации представляющего интерес объекта. Посредством интерфейса пользователь может вводить и/или манипулировать информацией, на основании которой одна из целевых областей субъекта идентифицируется в качестве заданной целевой области. Таким образом, пользователь может приспособить устройство в соответствии с настоящим изобретением к конкретным потребностям текущей ситуации, в которой находится пользователь.
В соответствии с другим предпочтительным аспектом настоящего изобретения, устройство, дополнительно включает в себя трехмерный сканер для получения трехмерного отображения субъекта. За счет включения в комплект оборудования устройства по настоящему изобретению трехмерного сканера, можно соединить получение данных, используемых для создания трехмерного отображения с аспектом локализации по настоящему изобретению. Такое соединение устраняет необходимость в проверке совместимости между трехмерным отображением и параметрами по настоящему изобретению, которая может возникнуть в случаях, когда трехмерное отображение, используемое устройством в соответствии с настоящим изобретением, обеспечивается внешним источником, подобным медицинской базе данных о подлежащем обследованию пациенте.
В соответствии с еще одним аспектом настоящего изобретения, устройство, дополнительно включает в себя блок сегментации для сегментации трехмерного отображения на множество сегментов, соответствующих множеству структурных областей субъекта. В соответствии с данным предпочтительным аспектом, блок сегментации может быть, в частности, приспособлен с учетом любых определенных потребностей настоящего изобретения, т.е., блок сегментации может представлять собой блок, предназначенный для соответствия определенным спецификациям, оптимизированным для настоящего изобретения.
Необходимо отметить, что даже в отношении аспектов настоящего изобретения, в соответствии с которыми предоставляется трехмерный сканер и/или блок сегментации, эти аспекты могут, тем не менее, включать опцию, состоящую в том, что соответствующие данные (т.е., трехмерное отображение и/или его сегментация) могут вводиться в устройство в соответствии с настоящим изобретением из какого-либо внешнего источника.
В соответствии с другим предпочтительным аспектом настоящего изобретения, устройство дополнительно включает в себя блок визуализации для получения двумерного изображения, причем блок визуализации представляет собой предпочтительно флюороскоп. Было обнаружено, что оказывает благоприятный эффект включение блока визуализации в состав устройства по настоящему изобретению, в частности, обеспечивающего возможность более непосредственной и происходящей в реальном времени связи между получением 2D изображения и локализацией представляющего интерес объекта.
В соответствии с предпочтительным аспектом настоящего изобретения, способ дополнительно включает в себя этапы, на которых получают трехмерное отображение субъекта и получают двумерное изображение.
Устройство и способ по настоящему изобретению могут быть также предоставлены отдельно от действительного получения данных для отображения, произведения сегментации и получения изображения (изображений). Однако если в устройстве по настоящему изобретению объединяется (объединяются) (например) сканер, например, в отношении компьютерной томографии или устройства для визуализации методом ядерно-магнитного резонанса, блока сегментации и/или флюороскопа, то блоки устройства и/или этапы способа могут приспосабливаться друг к другу для улучшения функции.
В соответствии с еще одним предпочтительным аспектом настоящего изобретения, блок локализации выполнен с возможностью обработки флюороскопического изображения субъекта. Предпочтительной областью применения настоящего изобретения является область электрофизиологии, в которой обычно предоставляются флюороскопические изображения.
В соответствии с другим предпочтительным аспектом настоящего изобретения, получение двумерного изображения и локализация объекта выполняются в инвазивной процедуре, а получение трехмерного отображения субъекта выполняется в процедуре перед вмешательством. Например, для обеспечения прослеживания хода представляющего интерес объекта во время инвазивной процедуры, подобной радиочастотной деструкции для лечения мерцательной аритмии, получение двумерного изображения или проецирование действительной ситуации внутрь субъекта (тела) и локализация объекта выполняются предпочтительно в реальном времени, т.е., по существу одновременно и непрерывно. В таком случае, отображение, включая сегментацию, предпочтительно обеспечивается перед вмешательством. Таким образом, имеется меньше ограничений по времени, и любая подгонка к совмещению, которая может потребоваться для улучшения ее качества, может быть завершена до начала процедуры лечения или диагностики как таковой.
В соответствии с еще одним предпочтительным аспектом настоящего изобретения, представляющий интерес объект представляет собой инструмент для инвазивного вмешательства, в частности, катетер или электростимулятор-зонд. Как указано выше, настоящее изобретение в частности можно применять в сфере медицинских инвазивных процедур, в частности, включая подлежащие локализации катетеры.
В соответствии с еще одним предпочтительным аспектом настоящего изобретения, устройство дополнительно включает в себя блок мечения для мечения объекта, причем блок мечения выполнен с возможностью генерирования заданной индикации, подлежащей связи с объектом в случае, если объект локализуется в зоне из множества зон, которая связана с заданной меченой областью. В соответствии с данным аспектом, автоматическое мечение, например, одного или нескольких катетеров в соответствии с их положением может быть также выведено из проекции анатомических областей. Особенно полезным применением настоящего изобретения является возможность автоматического нанесения меток на устройства, выявленные при 2D флюороскопии, например, на катетер коронарного синуса (CS) при EP процедуре. Представляющая интерес область, соответствующая проекции области CS, не только помогает выявлению катетера, но также дает идентификацию выявленного катетера в данной области, которая может автоматически появляться в виде метки. Так, например, EP катетер, который располагается в опорном участке (например, коронарном синусе, легочных венах) может легче выявляться и метиться с использованием проекции соответствующего представляющего интерес объема, который достаточно мал. Следует отметить, что меченая область может отличаться от целевой области. Примером такой ситуации является локализация катетера с использованием целевой области/сегмента, соответствующего сердцу пациента, тогда как для областей сердца представляются дополнительные (суб)-сегменты для обеспечения возможности более детального мечения катетера в соответствии с его положением внутри сердца.
Предпочтительные варианты осуществления изобретения определяются, в частности, в прилагаемой формуле изобретения. Следует понимать, что устройство для локализации по п.1, способ локализации по п.8 и компьютерная программа по п.12 имеют аналогичные и/или идентичные предпочтительные варианты осуществления, как определено в зависимых пунктах формулы изобретения.
Кроме того, следует понимать, что любая комбинация зависимых пунктов формулы изобретения и/или другие признаки предпочтительных вариантов осуществления, описанных в настоящей заявке соответствующим независимым пунктом, может также составлять полезный вариант осуществления изобретения.
Краткое описание чертежей
Эти и другие аспекты изобретения будут очевидны и разъяснены со ссылкой на вариант(ы) осуществления, описанные ниже. На следующих чертежах:
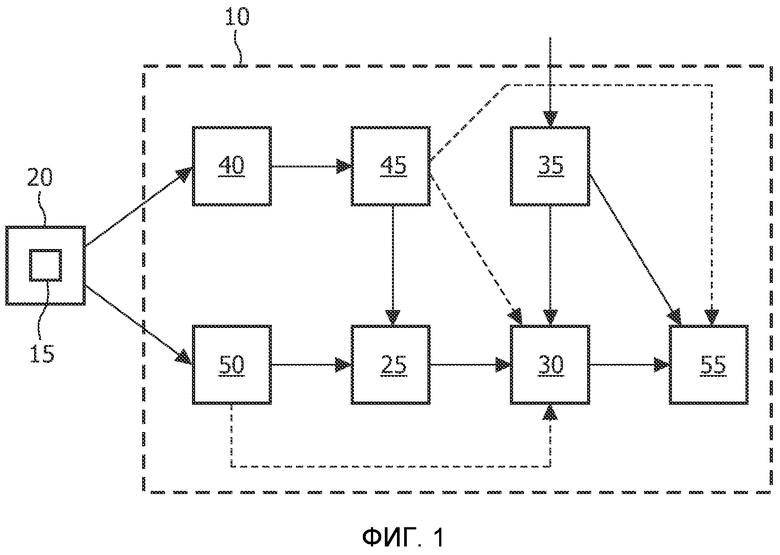
на фиг.1 схематически показано устройство в соответствии с настоящим изобретением для локализации представляющего интерес объекта у субъекта,
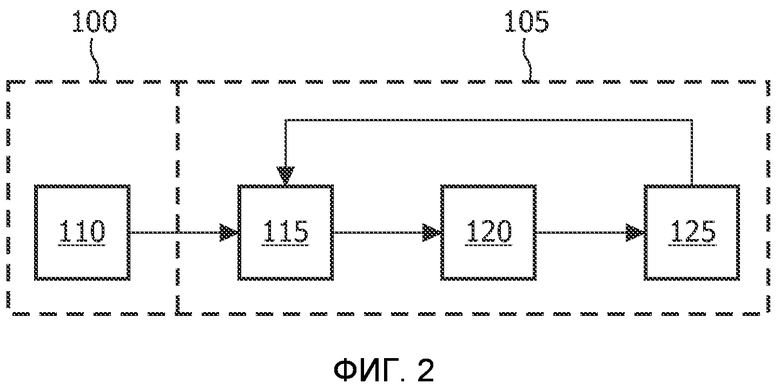
на фиг.2 показан график последовательности операций, схематически иллюстрирующий способ в соответствии с настоящим изобретением для локализации представляющего интерес объекта у субъекта, и
на фиг.3 показано изображение субъекта, включающее суб-изображения различных представляющих интерес объектов с обозначениями соответствующих зон, связанных с областями в субъекте.
Детальное описание вариантов осуществления изобретения
На фиг.1 схематически показано иллюстративное устройство 10 для локализации представляющего интерес объекта 15 у субъекта 20 в соответствии с предпочтительным вариантом осуществления настоящего изобретения. Объект 15 представлен внутри субъекта 20, где предстоит локализовать объект 15 внутри субъекта 20, по меньшей мере, относительно одной или нескольких определенной области (областей) субъекта 20.
Устройство 10 включает в себя устройство 40 для визуализации методом ядерно-магнитного резонанса (MRI) (другие варианты осуществления настоящего изобретения могут быть связаны, например, с компьютерной томографией (CT) или ротационной ангиографией), действующее как трехмерный сканер, блок 45 сегментации, соединенный с устройством 40 для 3D визуализации, флюороскоп 50 (другим примером устройства для 2D визуализации является ультразвуковое устройство), выступающий в качестве блока визуализации, блок 25 совмещения, соединенный с блоком 45 сегментации и флюороскопом 50 (в соответствии с другим вариантом осуществления, блок совмещения может быть альтернативно или дополнительно соединен с устройством для 3D визуализации, подобным устройству MRI 40), блок 30 локализации, соединенный с блоком 25 совмещения, интерфейс 35, соединенный с блоком 30 локализации, и блок 55 мечения, который соединен с блоком 30 локализации и интерфейсом 35. Для обеспечения возможности осуществления вносимых пользователем коррекций на других этапах, интерфейс, в соответствии с модифицированным вариантом осуществления (не показан) также соединен с блоком сегментации и/или блоком совмещения.
Могут использоваться несколько способов совмещения: При совмещении может использоваться сегментированная модель, но она может также быть основана на изображении (как в случае, когда сердце не визуализируется на рентгеновских изображениях, результат в последующем накладывается на сегментированные зоны) или может также использоваться один или несколько маркеров внутри или, предпочтительно, вне тела пациента.
Устройство 40 MRI получает трехмерный скан субъекта 20, предпочтительно, перед введением объекта 15 в тело субъекта 20, и передает скан в блок 45 сегментации, который обрабатывает скан для создания модели или отображения субъекта 20, включая один или несколько сегментов, показывающих одну или несколько структурных областей субъекта 20, для передачи в блок 25 совмещения.
Флюороскоп 50 обеспечивает получение, по меньшей мере, одного двумерного изображения субъекта 20, показывающего внутреннее строение субъекта 20, где изображение включает суб-изображение в виде индикации представляющего интерес объекта 15. Флюороскоп передает изображение или серию изображений в блок 25 совмещения.
Блок 25 совмещения принимает трехмерное отображение (оно может быть объемным от устройства 40 3D визуализации и/или результатом его сегментации от блока 45 сегментации) и, по меньшей мере, одно изображение от флюороскопа 50, и выполняет совмещение отображения с изображением, при котором на изображении определяется множество зон, соответствующих множеству сегментов, предоставленных на отображении из блока 45 сегментации, которые, в свою очередь, отображают соответствующие области у субъекта 20. Затем данные, указывающие эти зоны, и 2D изображение передается в блок локализации. В случае, когда блок 25 совмещения принимает множество изображений, т.е., серию меняющихся изображений по порядку во времени, то блок 25 совмещения адаптирует данные совмещения и/или данные зоны изображения, предпочтительно, для каждого кадра, для обновления результатов корреляции между зонами изображений дополнительного/нового изображения (изображений) и отображением.
Блок 30 локализации принимает данные, указывающие описанные выше зоны и 2D изображение (или множество изображений). Блок 30 локализации может принимать изображение либо от блока 25 совмещения (вместе с данными о зоне), либо непосредственно от флюороскопа 50 (как указано пунктирной стрелкой). Далее, блок 30 локализации принимает индикацию из интерфейса 35 (вводимую пользователем (не показан)) относительно области объекта, в которой должен локализоваться представляющий интерес объект 15 (В соответствии с другим вариантом осуществления, индикация может не применяться, когда блок локализации выполнен с возможностью проверки одного или нескольких заданных областей объекта без необходимости дальнейшей индикации). На основании предоставленных вводимых данных (т.е., изображения, данных о зоне и выбора области объекта), блок 30 локализации выполняет обработку изображения, посредством этого извлекая суб-изображение в виде индикации представляющего интерес объекта 15 из изображения (В соответствии с другими вариантами осуществления, индикация может, например, представлять собой сегментацию, контур и/или положение). Данная обработка изображения ограничивается зоной объекта, соответствующей выбранной области объекта.
Ввиду этого ограничения подлежащих обработке данных, обработка изображения может быть более быстрой и/или точной и/или эффективной без необходимости наращивания мощности компьютера.
Кроме того, в соответствии с альтернативным вариантом осуществления (не показан), интерфейс соединен с блоком совмещения, и блок совмещения передает только уменьшенное изображение в блок локализации, в соответствии с ограничением обработки изображения по настоящему изобретению.
В соответствии с другим альтернативным вариантом осуществления, блок совмещения обеспечивает набор параметров в качестве определения зон на изображении и передает этот набор параметров в блок локализации, в то время как блок локализации принимает отображение из блока сегментации (указанного пунктирной линией) и обеспечивает ограниченную обработку на основании предоставленного набора параметров, отображения и 2D изображения. В соответствии с этим альтернативным вариантом осуществления, блок совмещения обеспечивает получение виртуального совмещения, т.е., данных, описывающих совмещение, тогда как действительное совмещение обеспечивается блоком локализации.
После локализации представляющего интерес объекта 15, данные о локализации передаются в блок 55 мечения, который может быть соединен с блоком 45 сегментации для получения данных сегментации, относящихся к отображению.
На фиг.2 показан график последовательности операций, схематически иллюстрирующий способ локализации у субъекта, представляющего интерес объекта в соответствии с изобретением.
Способ локализации, иллюстрируемый на фиг.2, включает две общие фазы, т.е., фазу 100 перед инвазивным вмешательством перед процедурой лечения и/или диагностики и фазу 105 инвазивного вмешательства, при которой выполняется локализация в реальном масштабе времени во время процедуры лечения и/или диагностики. На этапе 110, получается и обрабатывается (включая сегментацию) трехмерное отображение субъекта. На последующем этапе, этапе 115, получается двумерное изображение субъекта, показывающее представляющий интерес объект внутри субъекта.
На следующем этапе, этапе 120, трехмерное отображение субъекта, которое включает множество сегментов, соответствующих множеству структурных областей субъекта, накладывается на двумерное изображение, посредством этого определяя множество зон на изображении, соответствующих множеству сегментов, так что, по меньшей мере, одна зона из множества зон связана с соответствующей областью из множества областей.
На основании полученного таким образом совмещения отображения и изображения, локализация представляющего интерес объекта осуществляется на этапе 125, на котором блок локализации выполнен с возможностью извлечения суб-изображения объекта из изображения путем обработки изображения, причем обработка изображения ограничивается одной зоной объекта из множества зон, которая связана с заданной областью объекта.
Последовательность этапов 115-125 может повторяться непрерывно или в заданные точки времени во время процедуры инвазивного вмешательства.
На фиг.3 показано изображение субъекта, включающее суб-изображения различных представляющих интерес объектов с индикациями соответствующих зон, связанных с областями субъекта. В соответствии с одним вариантом осуществления настоящего изобретения, система сконструирована для получения 2D флюороскопических изображений анатомической области, также содержащей инструменты для инвазивных вмешательств, такие как катетеры и/или отведения электростимулятора. Такое флюороскопическое изображение 200 иллюстрируется на фиг.3. Еще одна система получения изображения сконструирована для получения 3D объема той же анатомической области, в данном случае, сердца. Производится сегментация данного сердца или его части (предсердия, коронарных вен...), и получается 3D модель. Производится наложение наборов данных 3D и 2D, и сегментация 3D может затем проецироваться на 2D изображения, как иллюстрируется зонами 205, 210 и 215 на фиг.3. Зона 205 соответствует домену левого предсердия, зона 210 указывает домен коронарного синуса, и зона 215 связана с доменом нижней полой вены. Кроме того, на фиг.3 также видно множество катетеров 220, 225 и 230. Расположение модели в одном кадре обеспечивает возможность выявления опорного катетера или отведения в данном анатомическом участке. Этот участок может представлять собой коронарный синус с длинным катетером/отведением в нем или в устье одной или нескольких легочных вен с катетером «лассо» в нем, как представлено на фиг.3.
В соответствии с настоящим изобретением, мощность компьютера и/или время, необходимые для обработки изображения для локализации данного объекта, подобного катетерам 220, 225, 230, уменьшается, по сравнению с обычной обработкой, поскольку зона изображения, подлежащая обработке, уменьшается до (зоны объекта, соответствующей) представляющей интерес области, в которой находится представляющий интерес объект. Локализация также облегчается, потому что другие катетеры, которые не находятся в рассматриваемой зоне, могут не учитываться во время локализации.
После того как катетер/отведение выявлен на одном кадре, его ход может прослеживаться на последовательности 2D флюороскопических изображений.
Специалисту в данной области знакомы процедуры (включая алгоритмы) и оборудование, требуемые или используемые для осуществления настоящего изобретения, в частности для получения трехмерного отображения, включая его разделение на сегменты, для получения двумерного изображения субъекта, для совмещения трехмерного отображения с двумерным изображением для извлечения индикации представляющего интерес объекта из изображения. Поэтому в настоящее описание не включено детальное объяснение этих аспектов.
Дополнительные данные, явившиеся предпосылками настоящего изобретения и относящиеся к процедурам вмешательств при мерцательной аритмии, можно найти, например, в статье "Mapping Techniques for Atrial Fibrillation Ablation" (Методики картирования для деструкции ткани по поводу мерцательной аритмии) Jasbir Sra и Masood Akhtar в журнале Curr Probl Cardiol, December 2007, стр. 669 - 767. Дополнительные данные, явившиеся предпосылками настоящего изобретения и относящиеся к совмещению изображений, можно найти, например, в статье "Registration of Three-Dimensional Left Atrial Computed Tomographic Images With Projection Images Obtained Using Fluoroscopy" (Совмещение трехмерных изображений левого предсердия, полученных с помощью компьютерной томографии, с проекционными изображениями, полученными с использованием флюороскопии) Jasbir Sra, David Krum, Angela Malloy, Melissa Vass, Barry Belanger, Elisabeth Soubelet, Regis Vaillant и Masood Akhtar (опубликованной в журнале Circulation. 2005;l12:3763-3768).
Электрофизиология (EP) представляет собой особый домен инвазивной кардиологии, где врачи применяют внутрисердечные катетеры для локализации и излечения электрических нарушений сердечного ритма, обычно под контролем рентгеновской флюороскопии. Очень проблематичной EP процедурой является радиочастотная деструкция для лечения мерцательной аритмии, также называемой AF. Другой важной процедурой является размещение электрокардиостимулятора для сердечной ресинхронизационной терапии (CRT), во время которой отведение электростимулятора необходимо поместить в коронарную вену. В частности, в контексте обычных устройств и способов электрофизиологам требуется специальная подготовка для совершенного знания анатомии и путей доступа ко всем представляющим интерес участкам и некоторая практика для выбора и коррекции устройств и манипулирования ими с продвижением к участку-мишени.
Анатомия тела пациента может регистрироваться устройствами для трехмерной (3D) визуализации (например, CT, MRI или инъекцией контрастного агента местно непосредственно в начале вмешательства (левое предсердие (LA) и устье легочных вен (PV) для AF и коронарные вены и синус для CRT), но врач должен в уме выполнять совмещение для продвижения во флюороскопических изображениях, полученных в живом организме, где эти данные больше не видны.
Для процедур, связанных с AF, знание точных положений катетеров при измерении электрических потенциалов является ключевым для поиска источников, которые вызывают фибрилляцию (эктопические очаги, петля рециркуляции возбуждения). Еще более важным является анатомическое картирование участков деструкции для выполнения желательных типов деструкции (таких как выделение PV или линейная деструкция верхней стенки LA).
Обычные EP процедуры, в настоящее время контролируемые флюороскопией, и, в частности AF, часто занимают несколько часов. Основной задачей таких процедур является определение пути электрического потенциала внутри предсердия для определения участка деструкции. Точная локализация EP катетеров на 3D изображении и представление зарегистрированных электрических потенциалов или участков деструкции, наложенных на 3D изображение анатомии предсердия (которое также называется электроанатомическим картированием или картированием участков деструкции) оказывает большую помощь электрофизиологу.
Хотя изобретение было проиллюстрировано и детально описано на чертежах и в предшествующем описании, такую иллюстрацию и описание следует считать иллюстративным и приведенным в качестве примера, а не ограничивающим; изобретение не ограничивается описанными вариантами осуществления.
Специалистам в данной области в результате изучения чертежей, описания и прилагаемой формулы изобретения могут стать понятны и осуществлены другие изменения описанных вариантов осуществления при реализации заявленного изобретения.
В формуле изобретения слово «включающий(ая)(ее)» не исключает другие элементы или этапы, а единственное число не исключает множественное число. Один процессор или другой блок может выполнять функции нескольких пунктов, указанных в формуле изобретения. То, что определенные меры приведены в различных зависимых пунктах, не указывает на то, что комбинация этих мер не может использоваться для достижения благоприятного эффекта.
Компьютерная программа может храниться/распространяться на подходящей среде, такой как оптическая среда хранения или твердая среда, поставляемая вместе или в качестве части другого аппаратного обеспечения, но может также распространяться в других формах, таких как через интернет или другие проводные или беспроводные телекоммуникационные системы.
Любые обозначения в формуле изобретения не следует рассматривать как ограничивающие объем изобретения.
Настоящее изобретение относится к области электрофизиологии. Техническим результатом является обеспечение возможности более точно определять положение объекта, тем самым повышая качество локализации. Устройство включает блок (25) совмещения для совмещения (120) 3D отображения субъекта, которое включает множество сегментов, соответствующих множеству структурных областей субъекта, с 2D изображением (200), причем блок совмещения выполнен с возможностью определения множества зон (205, 210, 215) на изображении с тем, чтобы, по меньшей мере, одна зона из множества зон была связана с соответствующей областью из множества областей, и блок (30) локализации для локализации (125) объекта, извлекая индикацию объекта из изображения путем обработки изображения, причем обработка изображения ограничивается зоной объекта из множества зон, которая связана с заданной областью объекта. 3 н. и 9 з.п. ф-лы, 3 ил.
1. Устройство (10) для локализации представляющего интерес объекта (15, 220, 225, 230) у субъекта (20), включающее в себя:
- блок (25) совмещения для совмещения (120) трехмерного отображения субъекта, которое включает множество сегментов, соответствующих множеству структурных областей субъекта, с двумерным изображением (200), причем блок совмещения выполнен с возможностью определения множества зон (205, 210, 215) в изображении, соответствующих множеству сегментов так, что, по меньшей мере, одна зона из множества зон связана с соответствующей областью из множества областей, и
- блок (30) локализации для локализации (125) объекта, причем блок локализации выполнен с возможностью извлечения индикации объекта из изображения путем обработки изображения, при этом обработка изображения ограничена зоной объекта из множества зон, которая связана с заданной областью объекта.
2. Устройство по п.1,
дополнительно, включающее в себя интерфейс (35), выполненный с обеспечением возможности выбора пользователем из множества областей субъекта целевой области в качестве заданной целевой области.
3. Устройство по п.1,
дополнительно, включающее в себя трехмерный сканер (40) для получения (110) трехмерного отображения субъекта.
4. Устройство по п.1,
дополнительно, включающее в себя блок (45) сегментации для сегментации (110) трехмерного отображения на множество сегментов, соответствующих множеству структурных областей субъекта.
5. Устройство по п.1,
дополнительно, включающее в себя блок (50) визуализации для получения (115) двумерного изображения, причем блок визуализации предпочтительно представляет собой флюороскоп.
6. Устройство по п.1,
в котором блок локализации выполнен с возможностью обработки флюороскопического изображения субъекта.
7. Устройство по п.1, дополнительно включающее в себя:
блок (55) мечения для мечения объекта, причем блок мечения выполнен с возможностью генерирования заданной индикации, предназначенной для связи с объектом в случае, если объект локализован в зоне из множества зон, которая связана с заданной меченой областью.
8. Способ локализации представляющего интерес объекта (15, 220, 225, 230) у субъекта (20), включающий в себя этапы, на которых:
совмещают (120) трехмерное отображение субъекта, которое включает в себя множество сегментов, соответствующих множеству структурных областей субъекта, с двумерным изображением (200), посредством чего определяют множество зон (205, 210, 215) на изображении, соответствующих множеству сегментов, так что, по меньшей мере, одна зона из множества зон связана с соответствующей областью из множества областей, и
локализуют (125) объект извлечением индикации объекта из изображения путем обработки изображения, причем обработка изображения ограничена зоной объекта из множества зон, которая связана с заданной областью объекта.
9. Способ по п.8, дополнительно включающий в себя этапы, на которых:
получают (110) трехмерное отображение субъекта и
получают (115) двумерное изображение.
10. Способ по п.9,
в котором получение двумерного изображения и локализацию объекта выполняют при инвазивной процедуре (105) вмешательства, и
получение трехмерного отображения субъекта выполняют перед инвазивной процедурой (100) вмешательства.
11. Способ по п.8,
в котором представляющий интерес объект является инструментом для инвазивного вмешательства, в частности катетером (205, 210, 215) или зондом электрокардиостимулятора.
12. Машиночитаемый носитель, содержащий компьютерную программу, включающую средство в виде кода программы, которая вызывает выполнение компьютером этапов способа по п.8 при выполнении указанной компьютерной программы компьютером.
| US20060079759 A1, 13.04.2006 | |||
| US2006023840 A1, 02.02.2006 | |||
| US2008037843 A1, 14.02.2008 | |||
| US20080075343 A1, 27.03.2008 | |||
| ПОВЫШЕНИЕ КАЧЕСТВА ИНТРАВАСКУЛЯРНОГО УЛЬТРАЗВУКОВОГО ИЗОБРАЖЕНИЯ И ОБРАБОТКИ СИГНАЛОВ | 1998 |
|
RU2238041C2 |

