Перекрестная ссылка на родственную заявку
[0001] Настоящая заявка относится к заявке 12475.0058-00000, поданной 28 января 2015 г. под названием «Three Dimensional Localization of a Moving Target for Adaptive Radiation Therapy», содержание которой в полном объеме включено в настоящую заявку путем отсылки.
Область техники, к которой относится изобретение
[0002] Изобретение относится, в общем, к лучевой терапии или радиотерапии. В частности, настоящее изобретение относится к системам и способам трехмерного отслеживания опухоли для применения при разработке плана радиотерапевтического лечения, подлежащего использованию во время радиотерапии.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0003] Радиотерапию применяют для лечения раковых заболеваний и других заболеваний в ткани млекопитающих (например, людей и животных). Одним таким методом радиотерапии является гамма-нож, с помощью которого пациента облучают большим числом низкоинтенсивных гамма-лучей, которые сходятся с получением высокой интенсивности и с высокой точностью на мишени (например, опухоли). В другом варианте осуществления радиотерапия обеспечивается с помощью линейного ускорителя, в результате чего опухоль облучается высокоэнергетическими частицами (например, электронами, протонами, ионами и т.п.). Размещением и дозой пучка излучения следует точно управлять, чтобы обеспечивать получение опухолью прописанного излучения, и размещение пучка должно быть таким, чтобы минимизировать поражение окружающей здоровой ткани, часто называемой органом (органами) риска (OAR).
[0004] Пучок излучения можно сформировать для согласования с формой опухоли, например, с помощью многостворчатого коллиматора (например, многостворчатый коллиматор включает в себя несколько вольфрамовых створок, которые могут перемещаться независимо друг от друга для создания специализированных форм пучков излучения). (Излучение называется «прописанным» потому, что врач выписывает предварительно заданное количество излучения для опухоли и окружающих органов, подобно рецепту на лекарство).
[0005] По традиции, для каждого пациента, план радиотерапевтического лечения («план лечения») можно создать с использованием метода оптимизации с учетом клинических и дозиметрических целей и ограничений (например, максимальной, минимальной и средней доз излучения для опухоли и критических органов). Процедура планирования лечения может включать в себя использование трехмерного изображения пациента, чтобы идентифицировать целевую область (например, опухоль) и идентифицировать критические органы вблизи опухоли. Создание плана лечения может быть длительной процедурой, в рамках которой разработчик плана пробует достичь различных целей или соответствовать различным ограничениям лечения (например, целям гистограммы доза-объем (DVH)), с учетом их отдельной значимости (например, весовой), чтобы создать план лечения, который является клинически допустимым. Приведенная задача может быть длительной процедурой проб и ошибок, которая осложняется ввиду различных органов риска (OAR, поскольку, когда число OAR увеличивается (например, до тринадцати при лечении головы и шеи), что усложняет процедуру. OAR, удаленные от опухоли, можно легко уберечь от излучения, а OAR, соседние или совмещенные с целевой опухолью, возможно, уберечь сложно.
[0006] Компьютерно-томографическая (КТ) визуализация традиционно служит в качестве первичного источника данных изображения для планирования радиотерапевтического лечения. КТ изображения предлагают точное представление геометрии пациента, и КТ значения можно прямо преобразовать в электронные концентрации (например, единицы Хаунсфилда) для вычисления дозы излучения. Однако, применение КТ приводит к облучению пациента дополнительно дозой излучения. Кроме КТ изображений, в лучевой терапии можно использовать сканированные изображения, полученные методом магнитно-резонансной томографии (МРТ-изображения) благодаря высокому контрасту мягких тканей в этих изображениях по сравнению с КТ изображениями. МРТ не подвергает воздействию ионизирующего излучения и может применяться для сбора функциональной информации о человеческом теле, например, метаболизме и функции ткани.
[0007] Для определения местоположения или отслеживания мишени (например, органа, опухоли и т.п.) можно применять системы визуализации, например, компьютерной томографии (КТ), флюороскопии и магнитно-резонансной томографии (МРТ). МРТ обычно применяют потому, что она обеспечивает высокий контраст мягких тканей без использования ионизирующего излучения, используемого в КТ. Пример системы радиотерапевтического лечения, объединенной с системой визуализации, может включать в себя систему МРТ-Linac (линейный ускоритель), который может использовать трехмерные (3D) изображения мишени (например, опухоли). МРТ-устройство системы МРТ-Linac может обеспечивать множество изображений, которые соответствуют частной карте распределения ядер водорода в тканях пациента. Изображения пациента можно получать в двумерной (2D) плоскости или в 3D объеме. Поскольку органы и опухоли перемещаются внутри тела пациента, то важно быстро и точно 3D локализовать мишень. Например, целевой орган или опухоль могут перемещаться вследствие движения разных типов (например, дыхательного, сердечного, перистальтического или движения пациента других типов). Однако, 2D МРТ-срезы обычно получают в конкретном местоположении тела пациента, и 2D МРТ-срез может и не включать в себя опухоль/мишень из-за движения целевого органа или опухоли. Поэтому, требуется система и способ сбора данных о целевой опухоли и отслеживания структуры и движения опухоли таким образом, чтобы полученный 2D МРТ-срез по местоположению, ориентации и/или включал в себя целевую опухоль, и последняя была заметна на 2D МРТ-срезах в клинических условиях.
[0008] Приведенные общие сведения являются общими сведениями о некоторых принципах настоящей заявки и не предполагают исключительной или исчерпывающей трактовки предмета настоящего изобретения. Дополнительные сведения о предмете настоящего изобретения приведены в подробном описании и прилагаемой формуле изобретения. Другие аспекты изобретения будут очевидны специалистам в данной области техники после прочтения и изучения последующего подробного описания и просмотра чертежей, которые входят в настоящую заявку, ни один из которых нельзя толковать в смысле ограничения. Объем настоящего изобретения определяется прилагаемой формулой изобретения и ее правомерными эквивалентами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0009] Некоторые варианты осуществления настоящего изобретения относятся к способу обработки медицинских изображений. Способ может быть реализован процессорным устройством, выполняющим множество компьютерно-выполняемых команд. Способ может локализовать и отслеживать подвижную трехмерную (3D) мишень в пациенте, проходящем курс лучевой терапии с контролем по изображениям, и содержать: (a) прием модели адаптивного фильтра для области интереса в пациенте, при этом модель адаптивного фильтра основана на мишени, подлежащей отслеживанию; (b) получение посредством устройства получения изображений двумерного (2D) среза области интереса в пациенте; (c) применение, процессором, модели адаптивного фильтра к 2D срезу, причем модель адаптивного фильтра включает в себя величину смещения; (d) определение процессором местоположения мишени в 2D срезе на основании модели адаптивного фильтра; (e) оценку процессором потенциального местоположения мишени на основании величины смещения; и повторение процессором этапов (b)-(e) для отслеживания подвижной мишени во время лучевой терапии пациента с контролем по изображениям.
[0010] Некоторые варианты осуществления настоящего изобретения относятся к системе обработки медицинских изображений. Система может локализовать и отслеживать подвижную трехмерную (3D) мишень, подлежащую облучению с использованием устройства лучевой терапии (далее, радиотерапевтического устройства) с контролем по изображениям в соответствии с планом радиотерапевтического лечения, при этом система может содержать процессор и память, функционально соединенную с процессором. Память может хранить множество медицинских изображений, множество моделей адаптивного фильтра, протокол сбора данных и компьютерно-выполняемые команды, которые, при выполнении процессором, предписывают процессору выполнять способ. Способ может содержать (a) прием из памяти двумерного (2D) среза в соответствии с протоколом сбора данных; (b) преобразование процессором 2D среза в конкретную область обработки; (c) применение процессором модели адаптивного фильтра к 2D срезу, при этом модель адаптивного фильтра включает в себя величину смещения; (d) формирование процессором карты откликов для каждой модели адаптивного фильтра, причем карта откликов включает в себя степень достоверности для каждого местоположения 2D среза; (e) идентификацию процессором согласования между моделью адаптивного фильтра и одним или более местоположениями на 2D срезе на основании высокой степени достоверности; (f) определение процессором местоположения мишени в 2D срезе на основании высокой степени достоверности; (g) оценку процессором потенциального местоположения мишени на основании величины смещения; и прием из памяти последующего 2D МРТ-среза и повторение этапов (b)-(g), чтобы отслеживать подвижную мишень во время лучевой терапии пациента с контролем по изображениям.
[0011] Дополнительные цели и преимущества настоящего изобретения будут частично изложены в последующем подробном описании и частично будут очевидны из описания или могут быть изучены при практической реализации настоящего изобретения. Цели и преимущества настоящего изобретения будут реализоваться и достигаться с помощью элементов и комбинаций, указанных, в частности, в прилагаемой формуле изобретения.
[0012] Следует понимать, что вышеприведенное общее описание и последующее подробное описание являются всего лишь примерными и пояснительными и не ограничивают заявленное изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] На чертежах, которые не обязательно вычерчены в масштабе, похожие числовые позиции могут обозначать похожие компоненты на разных видах. Похожие числовые позиции, имеющие буквенные индексы или разные буквенные индексы могут представлять разные примеры одинаковых компонентов. Чертежи изображают в общем в качестве примера, но не ограничения, различные варианты осуществления и вместе с описанием и формулой изобретения служат для пояснения раскрываемых вариантов осуществления. В подходящем случае одинаковые числовые позиции применяются на всех чертежах для ссылки на одинаковые или похожие части. Приведенные варианты осуществления являются наглядными и не предполагают истолкования как исчерпывающие или исключительные варианты осуществления настоящих устройств, систем или способов.
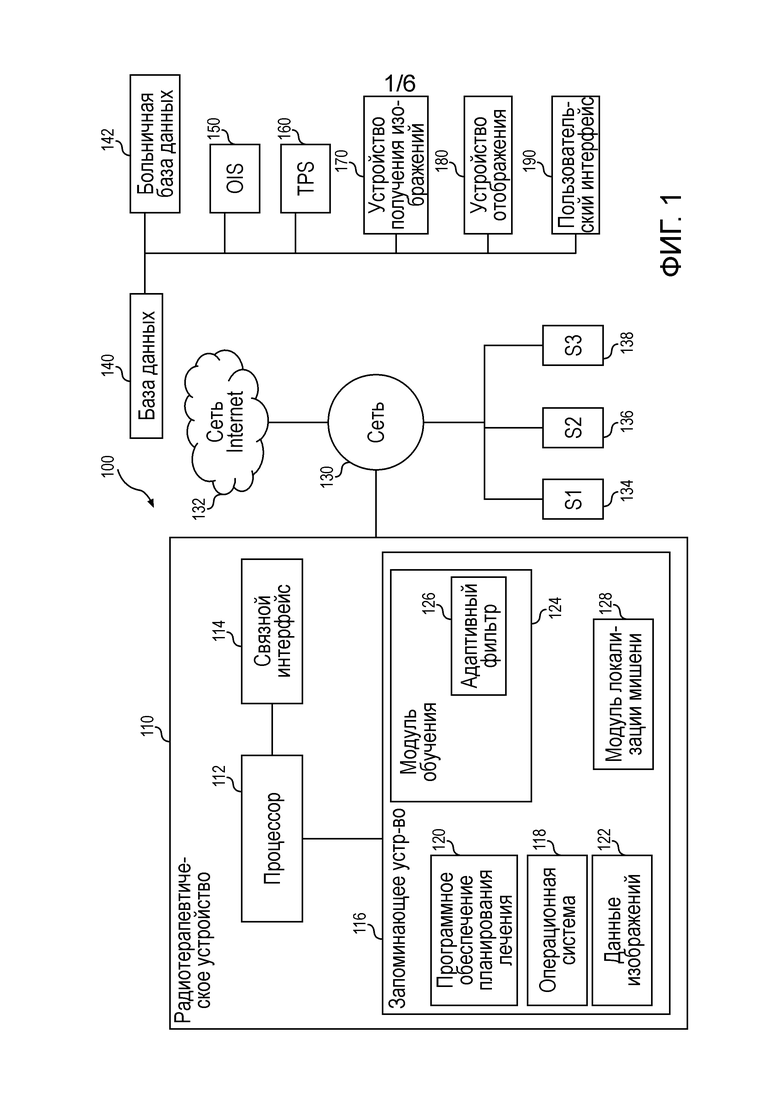
[0014] Фиг. 1 - изображение примерной радиотерапевтической системы для локализации и отслеживания трехмерной мишени для лучевой терапии.
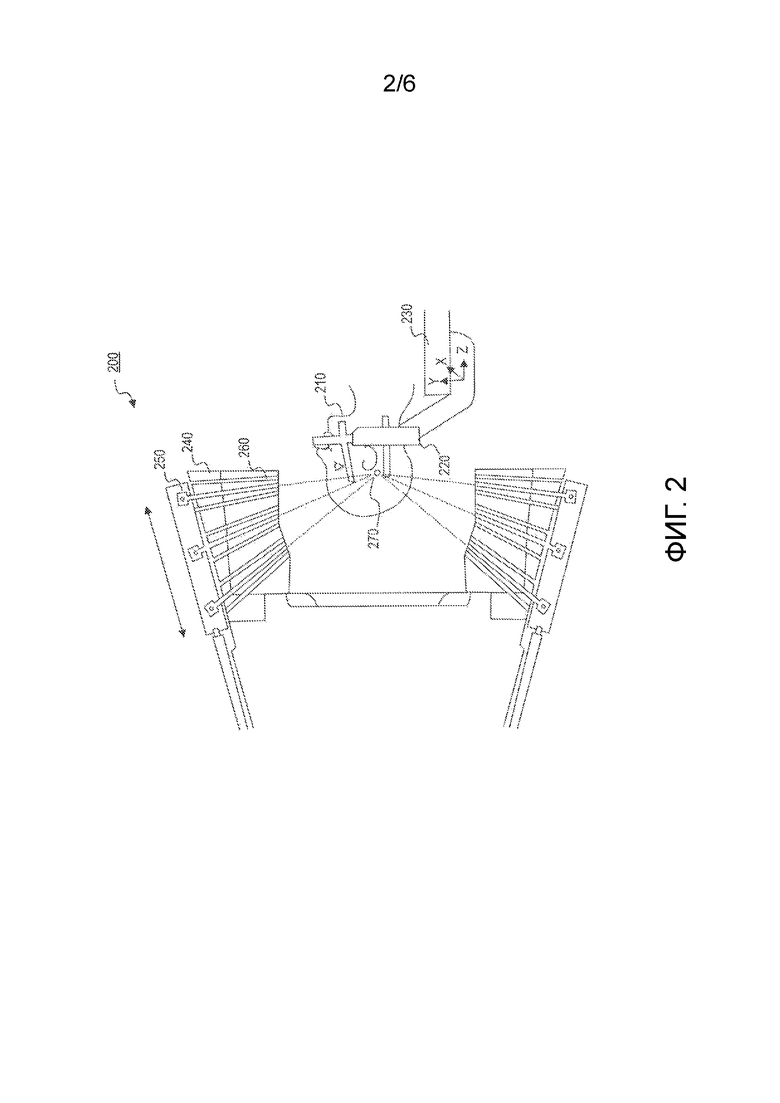
[0015] Фиг. 2 - изображение радиотерапевтического устройства, гамма-ножа, применяемых в радиотерапевтической системе, показанной на фиг. 1.
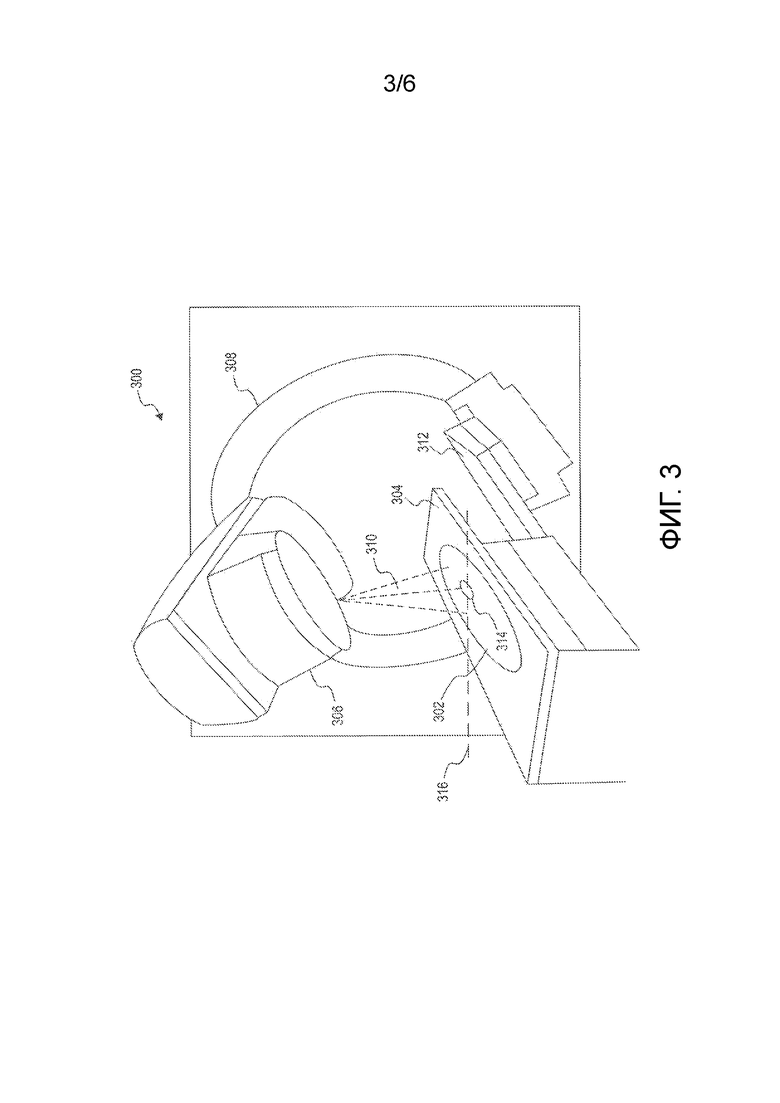
[0016] Фиг. 3 - изображение радиотерапевтического устройства, линейного ускорителя, применяемых в радиотерапевтической системе, показанной на фиг. 1.
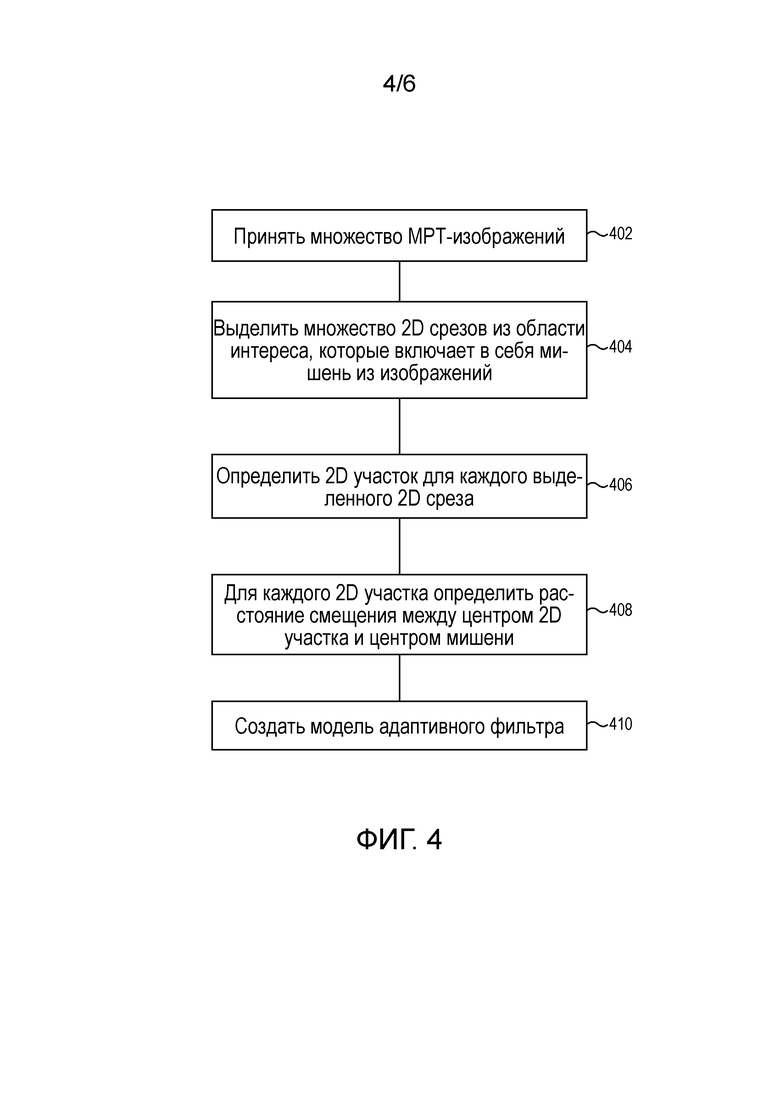
[0017] Фиг. 4 - примерная блок-схема последовательности операций модуля обучения для формирования модели адаптивного фильтра.
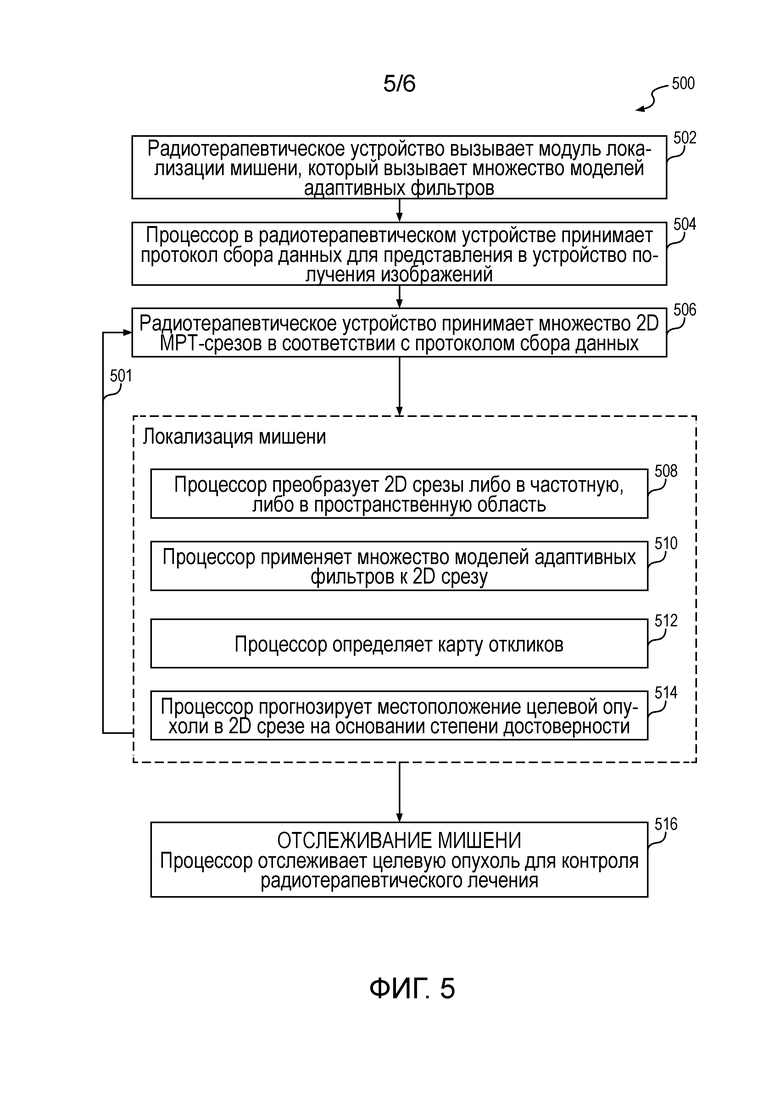
[0018] Фиг. 5 - примерная блок-схема последовательности операций способа применения одной или более обученных моделей адаптивного фильтра для локализации и отслеживания опухоли во время лучевой терапии пациента.
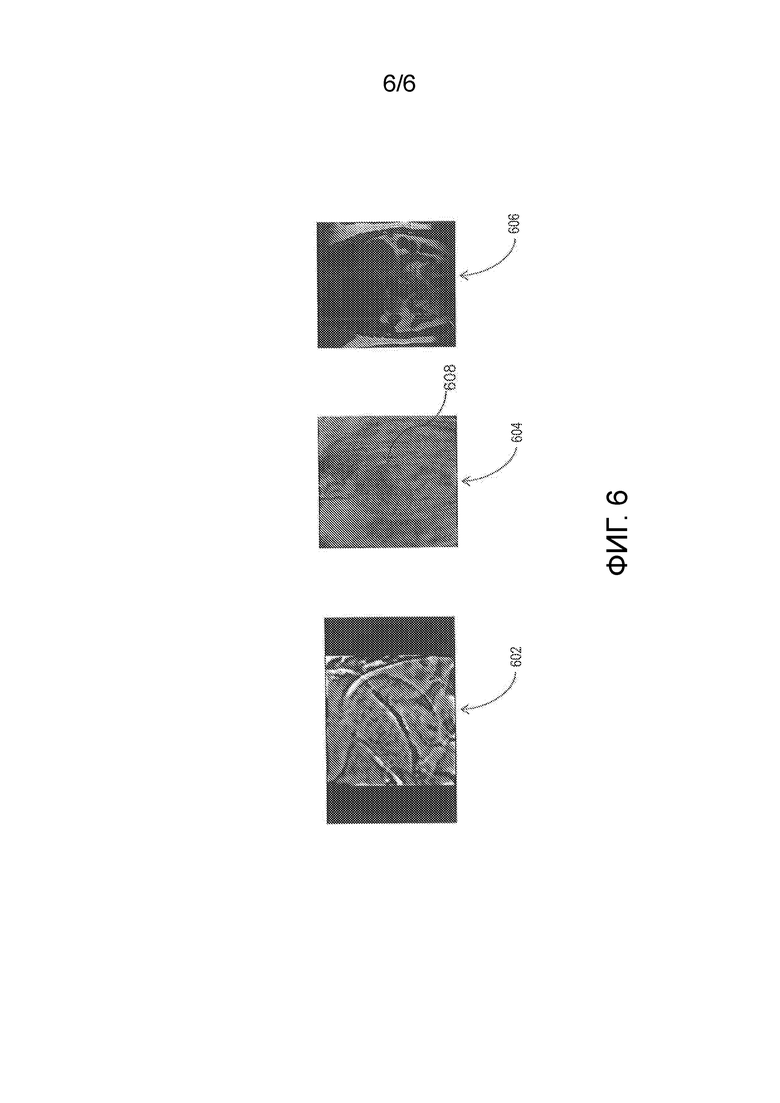
[0019] FIG. 6 - наглядное представление модели адаптивного фильтра, карты откликов и изображения отслеживания мишени в пациенте.
ПОДРОБНОЕ ОПИСАНИЕ
[0020] В настоящем описании предлагаются к рассмотрению радиотерапевтическая система и соответствующий способ локализации и отслеживания опухоли в анатомических структурах пациента, проходящего курс лучевой терапии. В частности, во время планирования радиотерапевтического лечения получают множество магнитно-резонансных 3D изображений (3D МРТ-изображений) или 4D (4-мерных) МРТ-изображений. Точное местоположение мишени, например, опухоли в анатомических структурах пациента может определяться радиотерапевтической системой с использованием методов сегментации, известных в данной области техники. После того, как определено местоположение опухоли, система может формировать множество участков и может определять смещение от центра участка к опухоли. Радиотерапевтической системой может применяться множество различных способов, например, методы корреляции или использования наглядной модели, чтобы усиливать выбранные признаки множества участков, которые приводят к множеству моделей адаптивного фильтра. Затем упомянутые модели адаптивного фильтра могут применяться радиотерапевтической системой во время фактического «интерактивного» лечения пациента.
[0021] Одно преимущество данного подхода состоит в том, что целевую опухоль можно локализовать и отслеживать во время радиотерапевтического лечения. Поскольку опухоль обычно перемещается внутри анатомических структур пациента вследствие множества разнотипных движений, например, движения, обусловленного дыханием, движением сердца, перистальтикой, непроизвольного движения пациента (например, кашля, чихания и т.п.) или произвольного движения, обусловленного нахождением пациента на процедурном столе во время радиотерапии. При использовании лучевой терапии с контролем по МРТ-изображениям, доступны только 2D срезы изображений анатомических структур пациента. Данный подход позволяет определять, какой(ие) 2D срез(ы) включает(ют) в себя опухоль и дополнительно эффективно обеспечивает способность отслеживать опухоль посредством оценки потенциального будущего местоположения.
[0022] Фиг. 1 изображает примерную радиотерапевтическую систему 100 для выполнения локализации и отслеживания мишени во время радиотерапевтического лечения. Радиотерапевтическая система 100 может включать в себя радиотерапевтическое устройство 110, подсоединенное к сети 130, которая соединена с сетью Internet 132. Сеть 130 может соединять радиотерапевтическое устройство 110 с базой данных 140, больничной базой данных 142, онкологической информационной системой (OIS) 150 (например, которая может представлять информацию о пациенте), системой 160 планирования лечения (TPS) (например, для формирования планов радиотерапевтического лечения, подлежащих использованию радиотерапевтическим устройством 110), устройством 170 получения изображений, устройством 180 отображения и пользовательским интерфейсом 190.
[0023] Радиотерапевтическое устройство 110 может включать в себя процессор 112, запоминающее устройство 116 и связной интерфейс 114. Запоминающее устройство 116 может хранить компьютерно-выполняемые команды, например, операционную систему 118, программное обеспечение 120 планирования лечения, модуль 124 обучения, который формирует адаптивный фильтр 126, и модуль 128 локализации мишени и любые другие компьютерно-выполняемые команды, подлежащие выполнению процессором 112.
[0024] Процессор 112 может быть соединен с возможностью информационного обмена с запоминающим устройством 116, и процессор 112 может быть выполнен с возможностью выполнения компьютерно-выполняемых команд, хранящихся в данном устройстве. Например, процессор 112 может выполнять модуль 124 обучения, чтобы реализовать функции как модуля 124 обучения, так и функции модуля 128 локализации мишени для определения местоположения мишени в пациенте во время осуществления радиотерапии. Кроме того, процессор 112 может выполнять программное обеспечение 120 планирования лечения (например, программное обеспечение Monaco® компании Elekta), которое может взаимодействовать с модулем 124 обучения и модулем 128 локализации мишени.
[0025] Процессор 112 может быть процессорным устройством, включать в себя одно или более универсальных процессорных устройств, например, микропроцессор, центральный процессор (CPU), графический процессор (GPU), ускоренный процессор (APU) или подобное устройство. В частности, процессор 112 может быть микропроцессором с комплексным набором команд (CISC-микропроцессором), микропроцессором с сокращенным набором команд (RISC-микропроцессором), микропроцессором со сверхдлинным командным словом (VLIW-микропроцессором), процессором, исполняющим другие наборы, или процессорами, исполняющими комбинацию наборов команд. Процессор 112 может быть также одним или более специальными процессорными устройствами, например, специализированной интегральной схемой (ASIC), вентильной матрицей, программируемой пользователем, (FPGA), цифровым сигнальным процессором (DSP), Системой на микросхеме (SoC) или чем-то подобным. Как будет очевидно специалистам в данной области техники, в некоторых вариантах осуществления процессор 112 может быть специальным процессором, а не универсальным процессором. Процессор 112 может включать в себя одно или более известных процессорных устройств, например, микропроцессор из семейства Pentium™, Core™, Xeon™ или Itanium®, выпускаемого компанией Intel™, семейства Turion™, Athlon™, Sempron™, Opteron™, FX™, Phenom™, выпускаемого компанией AMD™, или любой из различных процессоров, выпускаемых компанией Sun Microsystems. Процессор 112 может также включать в себя графические процессоры, например, GPU из семейства GeForce®, Quadro®, Tesla®, выпускаемого компанией Nvidia™, семейства GMA, Iris™, выпускаемого компанией Intel™, или семейства Radeon™, выпускаемого компанией AMD™. Процессор 112 может также включать в себя ускоренные процессоры, например, серии Desktop A-4(6,8), выпускаемой компанией AMD™, семейства Xeon Phi™, выпускаемого компанией Intel™. Раскрытые варианты осуществления не ограничены какими-либо типами процессоров, иначе сконфигурированных с возможностью удовлетворения требований к вычислительным ресурсам для идентификации, анализа, ведения, формирования и/или обеспечения больших объемов данных визуализации или для манипулирования данными визуализации, чтобы локализовать и отслеживать мишень, или для манипулирования данными любого другого типа, соответствующими раскрываемым вариантам осуществления. Кроме того, термин «процессор» может включать в себя по меньшей мере два процессора, например, многоядерную конструкцию или множество процессор, имеющих каждый многоядерную конструкцию. Процессор 112 может выполнять последовательности компьютерных программных команд, хранящихся в запоминающем устройстве 116, чтобы выполнять различные операции, процедуры, способы, которые будут подробно поясняться ниже.
[0026] Запоминающее устройство 116 может хранить данные 122 изображений (например, 3D МРТ-, 4D МРТ-, 2D срезов и т.п.), принятые из устройства 170 получения изображений, или данные/информацию любого другого типа в любом формате, который радиотерапевтическое устройство 110 может использовать для выполнения операций, соответствующих раскрываемым вариантам осуществления. Запоминающее устройство 116 может включать в себя постоянную память (ROM), флэш-память, оперативную память (RAM), динамическую оперативную память (DRAM), синхронную DRAM (SDRAM) или DRAM компании Rambus, статическую память (например, флэш-память, статическую оперативную память) и т.п., в которых хранятся компьютерно-выполняемые команды в любом формате. Компьютерные программные команды могут выбираться процессором 112, считываться из ROM или любой другой подходящей области памяти и загружаться в RAM для выполнения процессором 112. Например, запоминающее устройство 116 может хранить одно или более программных приложений. Программные приложения, хранящиеся в запоминающем устройстве 116, могут включать в себя, например, операционную систему 118 для обычных компьютерных систем, а также для программно-управляемых устройств. Кроме того, запоминающее устройство 116 может хранить все программное приложение или только часть программного приложения, которое может выполняться процессором 112. Например, запоминающее устройство 116 может хранить один или более планов радиотерапевтического лечения в виде программного обеспечения 120 планирования лечения, созданного системой 160 планирования лечения.
[0027] В некоторых вариантах осуществления запоминающее устройство 116 может включать в себя машиночитаемый носитель данных. Хотя машиночитаемый носитель данных в варианте осуществления может быть единственным носителем, следует понимать, что термин «машиночитаемый носитель данных» включает в себя единственный носитель или несколько носителей (например, централизованную или распределенную базу данных и/или связанные кэши и серверы), которые хранят один или более наборов компьютерно-выполняемых команд или данных. Следует также понимать, что термин «машиночитаемый носитель данных» включает в себя любой носитель, который способен хранить или кодировать набор команд для выполнения машиной, и которое назначает машине выполнять любые один или более методов по настоящему изобретению. Соответственно, следует понимать, что термин «машиночитаемый носитель данных» включает в себя, но без ограничения, твердотельные запоминающие устройства, оптические и магнитные носители. Например, память/запоминающее устройство 116 может быть одним или более энергозависимыми, долговременными или энергонезависимыми материальными компьютерно-читаемыми носителями.
[0028] Радиотерапевтическое устройство 110 может обмениваться информацией с сетью 130 через связной интерфейс 114, который соединен с возможностью информационного обмена с процессором 112 и запоминающим устройством 116. Связной интерфейс 114 может включать в себя, например, сетевой адаптер, кабельный соединитель, последовательный соединитель, соединитель USB, параллельный соединитель, адаптер для высокоскоростной передачи данных (например, такой, как волокно, USB 3.0, интерфейс Thunderbolt и т.п.), беспроводной сетевой адаптер (например, такой как адаптер WiFi), телекоммуникационный адаптер (например, стандартов 3G, 4G/LTE и т.п.) и т.п. Связной интерфейс 114 может включать в себя одно или более цифровых и/или аналоговых устройств связи, которые позволяют радиотерапевтическому устройству 110 обмениваться информацией с другими машинами и устройствами, например, дистанционно расположенными компонентами, по сети 130.
[0029] Сеть 130 может обеспечивать функции локальной сети (LAN), беспроводной сети, облачной вычислительной среды (например, программного обеспечения как сервиса, платформы как сервиса, инфраструктуры как сервиса и т.п.), клиент-серверной среды, глобальной вычислительной сети (WAN) и т.п. Поэтому сеть 130 может допускать передачу данных между радиотерапевтическим устройством 110 и рядом различных других систем и устройств, например: системой 160 планирования лечения, онкологической информационной системой 150 и устройством 170 получения изображений. Кроме того, данные, формируемые системой 160 планирования лечения, системой OIS 150 и устройством 170 получения изображений могут храниться в запоминающем устройстве 116, базе данных 140 или больничной базе данных 142. Данные могут передаваться/приниматься по сети 130 посредством связного интерфейса 114, чтобы выбираться процессором 112 при необходимости.
[0030] Кроме того, сеть 130 может соединяться с сетью Internet 132 для информационного обмена с серверами или клиентами, которые находятся удаленно и соединены с сетью Internet. Как описано, сеть 130 может включать в себя другие системы S1 (134), S2 (136), S3 (138). Системы S1, S2 и/или S3 могут быть идентичными системе 100 или могут быть отличающимися системами. В некоторых вариантах осуществления одна или более систем, соединенных с сетью 130 могут формировать распределенную вычислительную/моделирующую среду, которая совместно выполняет получение изображений, определение местонахождения мишени и отслеживание мишени, а также другие аспекты обеспечения радиотерапии пациента.
[0031] Дополнительно, радиотерапевтическая система 100 может обмениваться информацией с базой данных 140 или больничной базой данных 142 для выполнения одной или нескольких программ, хранящихся удаленно. Например, база данных 140, больничная база данных 142 или и та и другая могут включать в себя реляционные базы данных, например, базы данных Oracle™, базы данных Sybase™ или другие и могут включать в себя нереляционные базы данных, например, последовательные файлы Hadoop, HBase, Cassandra или другие. Такие удаленные программы могут включать в себя, например, программное обеспечение онкологической информационной системы (OIS) или программное обеспечение для планирования лечения. Программное обеспечение OIS, например, может храниться в больничной базе данных 142, базе данных 140 или системе OIS 150. Программное обеспечение для планирования лечения, например, может храниться в базе данных 140, больничной базе данных 142, системе 160 планирования лечения или системе OIS 150. Таким образом, например, радиотерапевтическое устройство 110 может обмениваться информацией с больничной базой данных 142 для реализации функций онкологической информационной системы 150.
[0032] Однако системы и способы раскрываемых вариантов осуществления не ограничены отдельными базами данных. В одном аспекте радиотерапевтическая система 100 может включать в себя базу данных 140 или больничную базу данных 142. В качестве альтернативы, база данных 140 и/или больничная база данных 142 могут располагаться удаленно от радиотерапевтической системы 100. База данных 140 и больничная база данных 142 могут включать в себя вычислительные компоненты (например, систему управления базами данных, сервер баз данных и т.п.), выполненные с возможностью приема и обработки запросов на данные, хранящиеся в запоминающих устройствах базы данных 140 или больничной базы данных 142, и представления данных из базы данных 140 или больничной(ых) баз(ы) данных 142. Специалисту в данной области техники будет очевидно, что базы данных 140, 142 могут включать в себя множество устройств, расположенных либо в централизованном, либо распределенном порядке.
[0033] Кроме того, радиотерапевтическое устройство 110 может обмениваться информацией с базой данных 140 по сети 130, чтобы посылать/принимать множество различных типов данных, хранящихся в базе данных 140. Например, в некоторых вариантах осуществления база данных 140 может быть выполнена с возможностью хранения множества изображений (например, изображений 3D МРТ-, 4D МРТ-, 2D МРТ-срезов, КТ изображений, флюороскопических 2D изображений, рентгеновских изображений, необработанных данных из магнитно-резонансных (МР) томограмм или КТ томограмм, данных в формате DICOM (формирования, хранения и передачи цифровых изображений) и т.п.)) из устройства 140 получения изображений. База данных 140 может хранить данные, подлежащие использованию модулем 128 локализации мишени, модулем 124 обучения и программным обеспечением 120 планирования лечения. Радиотерапевтическое устройство 110 может принимать данные визуализации (например, 3D МРТ-изображения, 4D МРТ-изображения) из базы данных 120, чтобы формировать множество моделей адаптивных фильтров, как описано ниже.
[0034] Кроме того, радиотерапевтическая система 100 может включать в себя устройство 170 получения изображений, которые могут получать медицинские изображения (например, изображения магнитно-резонансной томографии (МРТ-изображения), 3D МРТ-, 2D потоковые МРТ-, 4D объемные МРТ-изображения, компьютерно-томографические (КТ) изображения, изображения конусно-лучевой КТ, позитронно-эмиссионной томографии (ПЭТ), функциональные МРТ-изображения (например, изображения фМРТ, динамической контрастной МРТ и диффузионной МРТ), рентгеновские изображения, флюороскопические изображения, ультразвуковые изображения, радиотерапевтические портальные изображения, изображения однофотонной эмиссионной компьютерной томографии (ОФЭКТ) и т.п.) пациента. Устройство 170 получения изображений может быть, например, устройством МРТ-визуализации, устройством КТ-визуализации, устройством ПЭТ-визуализации, ультразвуковым устройством, флюороскопическим устройством, устройством ОФЭКТ-визуализации или другим устройством медицинской визуализации для получения одного или более медицинских изображений пациента. Изображения, полученные устройством 170 получения изображений, могут сохраняться в базе данных 140 в виде данных визуализации и/или тестовых данных. Например, изображения, полученные устройством 170 получения изображений, могут также сохраняться радиотерапевтическим устройством 110 в запоминающем устройстве 116.
[0035] В варианте осуществления, например, устройство 170 получения изображений может быть объединено с радиотерапевтическим устройством 110 в виде одного устройства (например, МРТ-устройства, объединенного с линейным ускорителем, называемым также «МРТ-Linac», или в виде интегрированного МРТ-устройства, объединенного с гамма-ножом). Упомянутое устройство МРТ-Linac можно определять, например, для определения местоположения целевого органа или целевой опухоли в пациенте, например, чтобы направлять лучевую терапию в соответствии с планом радиотерапевтического лечения на предварительно заданную мишень.
[0036] Устройство 170 получения изображений может быть выполнено с возможностью получения одного или более изображений анатомических структур пациента для области интереса (например, целевого органа, целевой опухоли или и того и другого). Каждый 2D срез может включать в себя один или более параметров (например, толщину, ориентацию и местоположение и т.п. 2D среза). Один или более параметров можно регулировать с использованием процессора 112, чтобы включить в него мишень. Например, выбранными признаками 2D среза можно манипулировать, например, посредством регулировки свойств колебательных РЧ сигналов. Например, положение среза можно изменять путем изменения основной частоты РЧ импульса и выдерживания одинаковой величины градиента. Кроме того, ориентацию среза можно изменять, например, с помощью физически отличающейся оси градиента (например, выбранный срез может быть ортогонален прикладываемому градиенту). В примере, устройство 170 получения изображений (например, МРТ или МРТ-Linac) может получать 2D срез в любой ориентации. Например, ориентация 2D среза может включать в себя сагиттальную ориентацию, корональную ориентацию или аксиальную ориентацию. Приведенные ориентации могут соответствовать градиенту магнитного поля (например, Gx, Gy или Gz, соответственно), связанному с МРТ или МРТ-Linac. Процессор 112 может регулировать параметр, например, толщину 2D среза, чтобы включить в него целевой орган или целевую опухоль. В примере, толщину среза можно вычислять и регулировать, например, с использованием уравнения 1:
[0037]  . (уравнение 1)
. (уравнение 1)
[0038] В уравнении 1 T может представлять толщину 2D среза, например, измеряемую в единицах расстояния (например, миллиметрах). Δ может представлять ширину полосы возбуждения, соответствующую радиочастотному импульсу, прикладываемому на заданной частоте, (например, в Герцах, «Гц»). Символ γ может представлять постоянную величину, называемую гиромагнитным отношением (например, для фотонов, γ имеет значение 267,54 МГц/Тесла).
может представлять ширину полосы возбуждения, соответствующую радиочастотному импульсу, прикладываемому на заданной частоте, (например, в Герцах, «Гц»). Символ γ может представлять постоянную величину, называемую гиромагнитным отношением (например, для фотонов, γ имеет значение 267,54 МГц/Тесла).  может представлять градиент магнитного поля (например, измеряемый в единицах Тесла/метр). В примере 2D срезы могут определяться из такой информации, как объемное 3D МРТ-изображение. Такие 2D срезы могут быть получены устройством 170 получения изображений в «реальном времени», а пациент проходит радиотерапевтическое лечение, например, при использовании радиотерапевтического устройства 110.
может представлять градиент магнитного поля (например, измеряемый в единицах Тесла/метр). В примере 2D срезы могут определяться из такой информации, как объемное 3D МРТ-изображение. Такие 2D срезы могут быть получены устройством 170 получения изображений в «реальном времени», а пациент проходит радиотерапевтическое лечение, например, при использовании радиотерапевтического устройства 110.
[0039] Система 160 планирования лечения может создавать и хранить планы радиотерапевтического лечения для конкретных пациентов, подлежащих лечению, планы радиотерапевтического лечения для других пациентов, в также другую радиотерапевтическую информацию (например, углы пучков, информацию гистограмм доза-объем, число пучков излучения, подлежащих использованию во время терапии, углы пучков, величину дозы на пучок и т.п.). Например, система 160 планирования лечения может обеспечивать информацию о конкретной дозе излучения, подлежащей подаче в пациента, и другую информацию, касающуюся радиотерапии, (например, тип терапии: такой как лучевая терапия с контролем по изображениям (IGRT), лучевая терапия с модуляцией интенсивности (IMRT), стереотаксическая радиотерапия; и т.п.).
[0040] Создание плана лечения может включать в себя обмен информацией с устройством 170 получения изображений (например, КТ устройством, МРТ-устройством, ПЭТ-устройством, рентгеновским устройством, ультразвуковым устройством и т.п.), чтобы выбирать изображения пациента и определять границы мишени, например, опухоли. В некоторых вариантах осуществления может потребоваться определение границ одного или более органов риска (OAR), например, здоровой ткани, окружающей опухоль или расположенной в непосредственной близости от опухоли. Поэтому, когда OAR находится вблизи целевой опухоли, может выполняться сегментация OAR. Кроме того, если целевая опухоль находится вблизи OAR (например, предстательная железа находится в непосредственной близости от мочевого пузыря и прямой кишки), то, при сегментации OAR, система 160 планирования лечения может допускать исследование распределения дозы не только в мишени, но также в OAR.
[0041] Для разграничения целевого органа или целевой опухоли с OAR, устройством 170 получения изображений можно неинвазивно получать медицинские изображения, например, МРТ-изображения, КТ изображения, ПЭТ-изображения, фМРТ-изображения, рентгеновские изображения, ультразвуковые изображения, радиотерапевтические портальные изображения, ОФЭКТ-изображения и т.п., пациента, проходящего курс радиотерапии, чтобы выявить внутреннюю структуру части тела. На основании информации из медицинских изображений можно получить 3D структуру. Кроме того, в ходе процедуры планирования лечения можно учитывать много параметров, чтобы достигнуть баланса между эффективным лечением целевой опухоли (например, с таким расчетом, чтобы целевая опухоль получала достаточную дозу излучения для эффективной терапии) и низким облучением органов OAR (например, получением органом(ами) OAR как можно меньшей дозы излучения), местоположение целевого органа и целевой опухоли, местоположение OAR и перемещение мишени относительно OAR. Например, 3D структуру можно получить оконтуриванием мишени или оконтуриванием OAR внутри каждого 2D слоя или среза МРТ- или КТ изображения и объединением контура каждого 2D слоя или среза. Контур может создаваться вручную (например, врачом, дозиметристом или медицинским работником) или автоматически (например, с помощью такой программы, как программное обеспечение для автосегментации на базе Atlas, ABAS®, выпускаемое компанией Elekta, AB, Стокгольм, Швеция). В некоторых вариантах осуществления 3D структура целевой опухоли или OAR может создаваться автоматически системой 160 планирования лечения.
[0042] После того как целевая опухоль и орган(ы) OAR локализованы и оконтурены, дозиметрист, врач или медицинский работник может определить дозу излучения, подлежащую подведению в целевую опухоль и любой OAR вблизи опухоли (например, левую или правую околоушную железу, зрительные нервы, глаза, хрусталик, внутренние уши, спинной мозг, ствол головного мозга и т.п.). После того, как определяют дозу излучения для каждой анатомической структуры (например, целевой опухоли, OAR), можно выполнять процедуру, известную как обратное планирование, чтобы определить один или более параметров плана лечения, например, границы объема (например, задать объемы мишени, оконтурить чувствительные структуры), зазоры вокруг целевой опухоли и OAR, граничные дозы (например, полную дозу для целевой опухоли и нулевую дозу для любого OAR; 95% дозы для планируемого объема мишени (PTV), при этом принимаемые дозы равны для спинного мозга≤45 Гр, ствола головного мозга≤55 Гр и зрительных структур <54 Гр), выбрать угол пучка, настройки коллиматора и времена включения пучка. Результат обратного планирования может составлять план радиотерапевтического лечения, который может сохраняться в системе 160 планирования лечения или базе данных 140. Некоторые из приведенных параметров лечения могут коррелироваться. Например, настройка одного параметра (например, весовых коэффициентов разных целей, например, повышения дозы для целевой опухоли) с целью изменения плана лечения может повлиять на по меньшей мере один другой параметр, что, в свою очередь, может привести к разработке отличающегося плана лечения. Таким образом, система 160 планирования лечения может создать специальный план радиотерапевтического лечения, имеющий приведенные параметры, чтобы радиотерапевтическое устройство 110 обеспечивало радиотерапевтическое лечение пациента.
[0043] Кроме того, радиотерапевтическая система 100 включает в себя устройство 180 отображения и пользовательский интерфейс 190. Устройство отображения 180 может включать в себя один или более дисплейных экранов, которые отображают медицинские изображения, интерфейсную информацию, параметры планирования лечения (например, контуры, дозировки, углы пучков и т.п.), планы лечения, мишень, локализацию мишени и/или отслеживание мишени или любую соответствующую информацию для пользователя. Пользовательский интерфейс 190 может быть клавиатурой, малой клавиатурой, сенсорным экраном или устройством любого типа, с помощью которого пользователь может вводить информацию в радиотерапевтическую систему 100.
[0044] Чтобы радиотерапевтическое устройство 110 локализовало и отслеживало целевую опухоль в анатомической области интереса, например, процессор 112 может выполнять модуль 128 локализации мишени. Модуль 128 локализации мишени может использовать модель 126 адаптивного фильтра, созданную модулем 124 обучения, как поясняется в дальнейшем в настоящем описании. Кроме того, модель адаптивного фильтра может включать в себя информацию в конкретной области (например, пространственной области или частотной области), информацию о местоположении (например, 3D местоположение в объеме, информацию о 3D смещении или информацию о 2D смещении). Модуль 128 локализации мишени использует по меньшей мере одну модель 126 адаптивного фильтра, созданную модулем 124 обучения, как описано ниже.
[0045] Кроме того, любые и все компоненты радиотерапевтической системы 100 в варианте осуществления могут быть реализованы в виде виртуальной машины (например, VMWare, Hyper-V и т.п.). Например, виртуальная машина может быть программным обеспечением, которое функционирует как аппаратное обеспечение. Поэтому виртуальная машина может включать в себя по меньшей мере один или более виртуальных процессоров, одну или более виртуальных памятей, и один или более виртуальных связных интерфейсов, которые совместно функционируют как аппаратное обеспечение. Например, OIS 150, TPS 160, устройство 170 получения изображений можно реализовать как виртуальную машину. При условии, что имеются в наличии возможности по обработке данных, память и вычислительная мощность, всю радиотерапевтическую систему можно реализовать как виртуальную машину.
[0046] Фиг. 2 представляет пример одного типа устройства 200 для радиотерапевтического лечения, например, гамма-нож Leksell, изготавливаемый компанией Elekta, AB, Стокгольм, Швеция. Гамма-нож может быть выполнен с возможностью использования модуля 128 локализации мишени (показанного на фиг.1), который может дистанционно выбирать МРТ-изображения (например, из устройства 170 получения изображений), чтобы локализовать целевую опухоль в головном мозге. В варианте осуществления МРТ-устройство, например, устройство 170 получения изображений, может быть объединено с гамма-ножом. Как показано на фиг. 2, во время сеанса радиотерапии на пациента 210 может быть надета координатная рамка 220, чтобы обеспечивать стабильность части тела пациента (например, головы), подвергающегося хирургическому вмешательству или радиотерапии. Координатная рамка 220 и система 230 позиционирования пациента могут устанавливать систему пространственных координат, которая может служить при формировании изображения пациента, или во время лучевой хирургии. Радиотерапевтическое устройство 200 может включать в себя защитный корпус 240 для заключения в него множества источников 250 излучения. Источники 250 излучения могут создавать множество пучков излучения (например, элементарных пучков) через каналы 260 пучков. Множество пучков излучения может быть сформировано с возможностью фокусировки в изоцентре 270 с разных направлений. Хотя каждый отдельный пучок излучения может иметь относительно низкую интенсивность, изоцентр 270 может получать излучение относительно высокого уровня, когда несколько доз от разных пучков излучения аккумулируются в изоцентре 270. В некоторых вариантах осуществления изоцентр 270 может соответствовать мишени, подвергаемой хирургическому или лечебному воздействию, например, опухоли.
[0047] Фиг. 3 представляет другой примерный тип радиотерапевтического устройства 300 (например, линейного ускорителя, называемого LINAC, изготавливаемого компанией Elekta, AB, Стокгольм, Швеция). При применении линейного ускорителя 300, пациент 302 может располагаться на столе 304 для пациента, чтобы получать дозу излучения, заданную планом радиотерапевтического лечения, созданным системой 160 планирования лечения (показанной на фиг. 1). План радиотерапевтического лечения можно использовать для локализации и отслеживания 3D мишени в объеме, например, целевого органа или целевой опухоли, расположенных внутри анатомических структур пациента 302.
[0048] Линейный ускоритель 300 может включать в себя головку 306 излучателя, присоединенную к гентри 308, который поворачивается вокруг пациента 302. Головка 306 излучателя создает пучок 310 излучения, который направляется к целевому органу или целевой опухоли. По мере того, как гентри 308 поворачивается, головка 306 излучателя может поворачиваться вокруг пациента 302. Во время поворота головка 306 излучателя может подавать в пациента 302 множество доз излучения, изменяющихся в зависимости от угла и форму и размера опухоли, в соответствии с планом лечения, созданным системой 160 планирования лечения (показанной на фиг. 1). Поскольку органы и опухоли перемещаются внутри тела пациента, важна быстрая и точная 3D локализация мишени. Например, целевой орган или опухоль могут перемещаться вследствие движения различных типов (например, дыхательного, сердечного, перистальтического или движения пациента других типов). Поэтому, линейный ускоритель 300 может быть выполнен с возможностью локализации мишени (например, органа или опухоли) и отслеживания мишени во время радиотерапевтического лечения с помощью модуля 128 локализации мишени.
[0049] Кроме того, под столом 304 для пациента может быть обеспечен плоскопанельный сцинтилляционный детектор 312, который может поворачиваться синхронно с головкой 306 излучателя вокруг изоцентра 314, расположенного на целевом органе или целевой опухоли на теле пациента 32. Плоскопанельный сцинтиллятор может получать изображения с максимально достижимым отношением сигнала к шуму и может служить для верификации количества излучения, получаемого пациентом 302 во время любого конкретного сеанса радиотерапевтического лечения (например, радиотерапевтическое лечение может потребовать несколько сеансов лучевой терапии, при этом каждый сеанс обычно называется «фракцией»). Кроме того, упомянутые изображения используются для определения геометрической точности позиционирования пациента относительно головки 306 излучателя.
[0050] Пересечение оси 316 с центром пучка 310, создаваемого головкой 306 излучателя, обычно называется «изоцентром». Стол 304 для пациента может быть снабжен электроприводом, так что пациента 302 можно позиционировать так, чтобы место опухоли находилось в изоцентре 314 или вблизи него. Например, стол 304 для пациента может изменять положения относительно одного или более других компонентов линейного ускорителя 300, чтобы приподнимать, изменять продольное положение или поперечное положение пациента 302 относительно терапевтического источника излучения, расположенного в головке 306 излучателя.
[0051] В варианте осуществления линейный ускоритель 300 может быть объединен с устройством 170 получения изображений (показанным на фиг. 1) таким образом, что устройство магнитно-резонансной визуализации представляет собой отдельное устройство (например, МРТ-Linac). В таком случае, МРТ-Linac может включать в себя «виртуальный стол», который может «виртуально» регулировать выравнивание пациента 302 относительно источника излучения, когда стол 304 для пациента выполнен без возможности перемещения вследствие ограниченных размеров туннеля, по которому стол 304 для пациента вводят во время радиотерапевтического лечения. В данном варианте осуществления МРТ-Linac можно применять для определения местоположения мишени и отслеживания мишени в пациенте 302 с использованием модуля 128 локализации мишени, например, чтобы направлять лучевую терапию на предварительно заданную мишень.
[0052] Фиг. 4 представляет процедуру 400 создания модели 126 адаптивного фильтра посредством модуля 124 обучения. Модель 126 адаптивного фильтра (показанная на фиг. 1) может использоваться модулем 128 локализации мишени для определения местоположения мишени и затем для отслеживания мишени.
[0053] На этапе 402, модуль 124 обучения (показанный на фиг. 1) принимает из устройства 170 получения изображений множество изображений (например, 3D МРТ-, 4D МРТ- и т.п. изображения) области интереса для конкретного пациента. Множество изображений, например, могут быть 3D МРТ-изображениями или 4D МРТ-изображениями области интереса, которые содержат мишень (например, целевой орган, целевую опухоль и т.п.).
[0054] На этапе 404, модуль 124 обучения, использующий процессор 112 выполняет выделение множества срезов (например, 2D срезов), которые могут включать в себя мишень (например, целевой орган, целевую опухоль и т.п.) в области интереса из множества МРТ-изображений. Толщина, например, 2D срезов может быть предварительно заданной (например, установленной по информации, основанной на 3D МРТ-объеме или 4D МРТ-объеме) до начала радиотерапевтического лечения. Информация может включать в себя указание, в какой области, частотной области или пространственной должны быть 2D срезы. В качестве альтернативы, модуль 124 обучения может принимать информацию о 2D срезах, когда пациент 402 проходит курс лучевой терапии (например, в реальном времени). Например, установку МРТ-Linac можно применять для радиотерапевтического лечения пациента 402. В процессе радиотерапии, МРТ-Linac может снимать множество 3D МРТ-изображений или 4D МРТ-изображений во время облучения. Выделенные срезы представляют собой 2D срезы анатомических структур пациента, которые окружают мишень. Кроме того, выделенные 2D срезы могут быть либо параллельны, либо ортогональны движению мишени.
[0055] На этапе 406 процессор 112 определяет один или более 2D участков для каждого выделенного 2D среза. В примере, 2D участок может соответствовать зоне изображения 2D среза, которая может включать в себя мишень. 2D участок может быть выбран любой формы (например, квадратной, прямоугольной, круглой, многоугольной формы и т.п.) и может изменяться по размеру (например, 32×32-пиксельный участок, 64×64-пиксельный участок и т.п.). Для иллюстрации, квадратный участок может иметь размер, например, 32×32 пикселей, соответствующий мишени в 2D срезе, который равен 512×512 пикселям. В примере, 2D участок может включать в себя информацию о мишени и информацию, соответствующую зоне, которая не включает в себя мишень (например, фоновую информацию).
[0056] На этапе 408 процессор 112 определяет величину смещения. Величина смещения является, например, расстояние от центра 2D участка до центра мишени, которую следует отслеживать. 2D участки могут включать в себя информацию об области (например, информацию о пространственной области или частотной области 2D участков). Кроме того, информация о смещении может включать в себя такую информацию, как смещение 2D участка от опорной точки (например, опорной точки, соответствующей мишени в объеме), и информацию об изменении формы мишени (например, деформации). В примере, опорная точка может включать в себя вычисленный центр мишени (например, центроид опухоли). Величина смещения определяется для каждого 2D участка, содержащего мишень. Поэтому каждый 2D участок имеет соответствующую ему собственную величину смещения. Множество величин смещений и соответствующие им участки сохраняются в запоминающем устройстве 116.
[0057] Для примера предположим, что центр 2D участка имеет координаты (например, [xp, yp, zp]), и центр целевой опухоли имеет координаты (например, [xt, yt, zt)), тогда смещение центра 2D участка по отношению к 3D местоположению целевой опухоли может быть вектором (например, [ox,oy, oz]=[xt-xp, yt-yp, zt-zp]). Следовательно, процессор 112 может отслеживать целевую опухоль. Во время отслеживания, процессор 112 может определять местоположение центра 2D участка для нового расположения пациента (например, «оперативно/в реальном времени», например, как [xpnew, ypnew, zpnew]). Затем процессор 112 может определять местоположение опухоли (например, [xtnew, ytnew, ztnew]=[xpnew+ox, ypnew+oy, zpnew+oz]).
[0058] На этапе 410 процессор 112 может применить методы расчета адаптивных фильтров одного или более типов для преобразования каждого из участков в модель 126 адаптивного фильтра. Например, можно применить следующие типы расчетов адаптивных фильтров: согласованные фильтры, корреляционные фильтры максимальных зазоров, фильтры синтетических дискриминантных функций, фильтры наименьшей среднеквадратической ошибки и т.п. Кроме того, модель 126 адаптивного фильтра может включать в себя информацию об области и информацию о смещении, найденную из 2D участков, соответствующих мишени в объеме.
[0059] В общем, модели 126 адаптивных фильтров «моделируют», например, объект (например, опухоль), подлежащий локализации. Можно создать множество моделей 126 адаптивных фильтров. Например, могут быть модель адаптивного фильтра 126 для верха опухоли, модель 126 адаптивного фильтра для средней части опухоли и модель адаптивного фильтра 126 для нижней части опухоли. Дополнительно можно создать модели 126 адаптивных фильтров для различных частей анатомии человека (например, одного или более представляющих интерес целевых органов, например, предстательной железы, молочной железы, легкого, сердца, головного мозга и т.п.). Кроме того, можно создать модель 126 адаптивного фильтра для каждой представляющей интерес мишени (например, одной или более опухолей в конкретном органе, например, нескольких опухолей в легком; или, в случае, когда рак метастазировался, и в одном или более органов присутствует одна или более опухолей, и т.п.).
[0060] Кроме того, модель 126 адаптивного фильтра может рассчитываться либо в пространственной области, либо в частотной области. В примере, применение модели 126 адаптивного фильтра к 2D срезам может быть эффективнее в вычислительном отношении в частотной области. Модель 126 адаптивного фильтра может храниться в запоминающем устройстве 116 (показанном на фиг. 1) и выбираться процессором 112 для применения к последовательно получаемым 2D срезам (например, 2D срезам, получаемым «в реальном времени»/«оперативно»), чтобы прогнозировать местоположение мишени во время радиотерапевтического лечения пациента.
[0061] Фиг. 5 представляет примерную блок-схему последовательности операций рабочей процедуры 500 применения одной или более моделей 126 адаптивных фильтров для отслеживания мишени во время радиотерапевтического лечения пациента «в реальном времени»/«оперативно».
[0062] На этапе 502 процедура 500 начинается с того, что радиотерапевтическое устройство 110 (показанное на фиг. 1), использующее процессор 112, вызывает модуль 128 локализации мишени, который вызывает множество моделей 126 адаптивных фильтров, рассчитанных для области интереса (например, предстательной железы, молочной железы, легких и т.п.), включающей в себя целевую опухоль для конкретного пациента.
[0063] На этапе 504 процессор 112 принимает протокол сбора данных, чтобы обеспечить создание исходного набора 2D срезов устройством 170 получения изображений. Протокол может включать в себя, например, местоположение срезов, подлежащих получению (например, легкое, предстательную железу, головной мозг, почки и т.п.), ориентацию среза (например, на основании предварительно заданного потенциального движения органа, например, параллельно или ортогонально срезу, подлежащему получению) и толщину среза (например, 5-мм срез, 10-мм срез, 15-мм срез и т.п.). Пользователь может обеспечить первоначальную оценку местоположения мишени, которую можно представить посредством пользовательского интерфейса 190. Процессор 112 может использовать данную первоначальную оценку как первоначальное местоположение, с которого следует начинать получение 2D срезов. В качестве альтернативы, данная информация о местоположении может определяться автоматически процессором 112.
[0064] На этапе 506 радиотерапевтическое устройство дополнительно принимает множество 2D МРТ-срезов в соответствии с протоколом из устройства 170 получения изображений (например, МРТ-устройства или устройства МРТ-Linac). 2D изображения могут соответствовать области интереса, содержащей опухоль. 2D срезы могут быть параллельны или ортогональны опухоли. 2D срезы могут окружать опухоль. Кроме того, 2D срезы могут быть областью вокруг опухоли. Обычно МРТ-устройство обеспечивает 2D срезы в частотной области.
[0065] На этапах 508-514, описанных ниже, процессор 112 определяет местоположение опухоли на 2D срезе и ее местоположение в 3D объеме.
[0066] На этапе 508 процессор 112 может преобразовать 2D срезы либо в частотную область, либо в пространственную область. 2D срезы преобразуют для согласования с областью модели 126 адаптивного фильтра. Например, если модель 126 адаптивного фильтра 126 создавалась в пространственной области 2D срезов, то, например, процессор 116 может преобразовать 2D срезы в пространственную область. В качестве альтернативы, если модель 126 адаптивного фильтра создавалась в частотной области, то процессор 112 может преобразовать 2D срезы в частотную область.
[0067] На этапе 510 процессор 112 может применить модель 126 адаптивного фильтра. Как описано выше, модель адаптивного фильтра 126 является множеством моделей, созданных из множества 2D участков, которые были обучены модулем 124 обучения. Процессор 112 применяет множество моделей 126 адаптивных фильтров к 2D срезам. 2D срез и модель адаптивного фильтра, например, могут иметь одинаковую ориентацию (например, ортогональную направлению движения, параллельную направлению движения или и ту и другую). В примере, применение модели 126 адаптивного фильтра к 2D срезам может быть эффективнее в вычислительном отношении в частотной области. Пример того, как модель 126 адаптивного фильтра можно применить к 2D срезам, приведен в дальнейшем:
[0068] Модель 126 адаптивного фильтра 126 можно выразить 2D маской  в пространственной области, и 2D срез (например, 2D изображение) можно выразить как
в пространственной области, и 2D срез (например, 2D изображение) можно выразить как  . Применение модели 126 адаптивного фильтра к конкретному местоположению 2D среза может обеспечить корреляционную «степень достоверности». Степень достоверности обеспечивает, например, показание того, насколько конкретная модель адаптивного фильтра согласуется с конкретным местоположением 2D среза.
. Применение модели 126 адаптивного фильтра к конкретному местоположению 2D среза может обеспечить корреляционную «степень достоверности». Степень достоверности обеспечивает, например, показание того, насколько конкретная модель адаптивного фильтра согласуется с конкретным местоположением 2D среза.
[0069] В примере, чем точнее модель 126 адаптивного фильтра согласуется с конкретным местоположением 2D среза, тем выше степень достоверности. Степень достоверности можно использовать для прогнозирования того, расположена ли целевая опухоль и в каком месте внутри 2D среза. Для определения степени достоверности можно использовать ряд различных типов корреляции, в зависимости от обстоятельств. Например, можно использовать следующие типы корреляции: кросс-корреляцию, нормированную кросс-корреляцию или коэффициент корреляции, которые можно определить следующим образом:
[0070] Кросс-корреляция:  ;
;
[0071] Нормированная кросс-корреляция:  ; или
; или
[0072] Коэффициент корреляции:
[0073]  (например, коэффициент корреляции эквивалентен нормированной кросс-корреляции маски и изображения с поправкой на среднее).
(например, коэффициент корреляции эквивалентен нормированной кросс-корреляции маски и изображения с поправкой на среднее).
[0074] В вышеупомянутых уравнениях: P обозначает пространственную область маски;  и
и  обозначают среднее значение маски T и среза I, соответственно. Кроме того, как
обозначают среднее значение маски T и среза I, соответственно. Кроме того, как  , так и
, так и  связаны, например, условием
связаны, например, условием  , так что их значения можно интерпретировать как степень достоверности относительно идеального результата +1 согласования. Степень достоверности может включать в себя такую информацию, как, например, вышеопределенные R, N или C.
, так что их значения можно интерпретировать как степень достоверности относительно идеального результата +1 согласования. Степень достоверности может включать в себя такую информацию, как, например, вышеопределенные R, N или C.
[0075] Три корреляционных вычисления могут также выполняться в частотной области посредством применения теоремы свертки, например:  , где
, где  и
и  означают прямое и обратное преобразования Фурье, соответственно.
означают прямое и обратное преобразования Фурье, соответственно.
[0076] На этапе 512 процессор 112 может определять карту откликов, в результате применения модели 126 адаптивного фильтра к 2D срезу. Для единственного 2D среза может быть создано множество карт откликов, так как каждая карта откликов может соответствовать конкретной модели адаптивного фильтра. Модель адаптивного фильтра и 2D срез могут иметь одинаковую ориентацию. Карта откликов может быть создана в пространственной области или частотной области. Как 2D срез, так и модель 126 адаптивного фильтра должны находиться в пространственной области, чтобы сформировать карту откликов в пространственной области. Аналогично, как 2D срез, так и модель 126 адаптивного фильтра должны находиться в частотной области, чтобы сформировать карту откликов в частотной области. Карта откликов может быть сформирована для каждого 2D среза. Сформированная карта откликов может быть изображением, которое указывает на степень, в которой конкретная модель 126 адаптивного фильтра согласуется с различными местоположениями в данном 2D срезе.
[0077] Например, модель A адаптивного фильтра (не показанная) может быть применена процессором 112 к каждому местоположению на 2D срезе. Для каждого местоположения процессор 112 может определить степень достоверности, которая указывает, насколько точно, например, адаптивный фильтр A согласуется с конкретным местоположением 2D среза. Чем точнее согласование между моделью A адаптивного фильтра и местоположением на 2D срезе, тем выше степень достоверности (например, ближе к +1) для данного конкретного местоположения. Более яркие зоны на изображении карты откликов могут указывать на более точное согласование и, следовательно, более высокую степень достоверности (например, модели A адаптивного фильтра в конкретном местоположении 2D среза), чем более темные зоны. Более яркие зоны могут иметь более высокие степени достоверности, чем более темные зоны на карте откликов. После того, как модель A адаптивного фильтра применяют к 2D срезу, может быть сформирована карта A откликов. Процессор 112 может вызвать другую модель B адаптивного фильтра (не показанную), например, и повторить процедуру применения модели B адаптивного фильтра к каждому местоположению на 2D срезе для формирования карты B откликов. Таким образом, процессор, использующий модуль локализации мишени может применять множество моделей адаптивных фильтров к 2D срезу для формирования множества карт откликов, которые могут сохраняться в запоминающем устройстве 116. В каждом местоположении 2D среза составляется степень достоверности, соответствующая используемой модели адаптивного фильтра. Высокая степень достоверности может соответствовать местоположению на 2D срезе, в котором может находиться целевая опухоль.
[0078] На этапе 514 процессор 112 может прогнозировать местоположение целевой опухоли на 2D срезе на основании степени достоверности. Например, для конкретного местоположения на карте откликов может быть несколько значений степени достоверности, при этом каждая степень достоверности может соответствовать конкретной модели адаптивного фильтра. Для прогнозирования местоположения опухоли процессор 112 может выбрать максимальное значение степени достоверности для конкретного местоположения на 2D срезе. В качестве альтернативы, процессор 112 может использовать взвешенное среднее значение всех степеней достоверности для конкретного местоположения на 2D срезе. В примере, процессор 112 может вычислять взвешенное среднее значение самых высоких N степеней достоверности, где N является предварительно заданным числом. Использование степеней достоверности, составленных с помощью нескольких моделей адаптивных фильтров, может повышать точность прогнозирования. Следовательно, высокая степень достоверности для конкретного местоположения может указывать на местоположение мишени на 2D срезе, и низкая степень достоверности может указывать, что в данном местоположении нет опухоли. Степень достоверности, ближайшая к +1, может указывать, что на 2D срезе расположена часть опухоли или вся опухоль.
[0079] Если процессор 112 определяет, что 2D срез не содержит опухоли, то процедура 500 возвращается по пути 501 обратно на этап 506 для получения другого 2D среза. Процедура 500 может назначить процессору 112 настроить протокол сбора данных на получение следующего 2D среза. В качестве альтернативы опухоль может содержаться в одном или более 2D срезах в зависимости от толщины среза, размера опухоли, ориентации опухоли и других факторов. Например, если нижняя часть опухоли содержится в имеющемся 2D срезе, процессор 112 может использовать информацию о смещении, чтобы определять, какой 2D срез следует получать в дальнейшем (например, 2D срез, содержащий центроид опухоли, или, возможно, 2D срез, содержащий верхнюю часть опухоли).
[0080] Например, по информации из конкретной модели адаптивного фильтра и соответствующей ему карты откликов, процессор 112 может определить местоположение опухоли на предыдущем 2D срезе. Кроме того, с использованием информации о смещении, связанной с моделью адаптивного фильтра, процессор 112 может также оценить местоположение (например, центр) опухоли в 3D пространстве. Например, процессор 112 может определять, что опухоль пересекает 2D срез в местоположении, например, (5,10)-х пикселей, и центр опухоли может на 5 мм отстоять от центра 2D среза в направлении, нормальном срезу. Для оценки следующего положения опухоли (например, отслеживания опухоли по мере ее движения), или для сбора более полной информации о форме опухоли (например, изменилась ли форма опухоли), процессор 112 может отрегулировать различные параметры (например, местоположение, в котором будет получен 2D срез, получение последующего 2D среза, который параллелен предыдущему срезу, но в другом положении, получение 2D среза, который ортогонален предыдущему срезу, регулировка толщины последующего среза и т.п.). Кроме того, с использованием информации о смещении из предыдущей модели адаптивного фильтра, процессор 112 может также оценить следующее положение опухоли. Таким образом, процессор 112 может отслеживать перемещение опухоли в реальном времени, когда пациент проходит курс лучевой терапии.
[0081] На этапе 516 процессор 112 может отслеживать опухоль, когда пациент проходит «в реальном времени» радиотерапевтическое лечение. Кроме того, процессор 112 может оценить форму опухоли, когда используется несколько 2D срезов.
[0082] Фиг. 6 изображает примерную модель адаптивного фильтра в применении к 2D МРТ-срезу для определения местоположения мишени (например, почек). На рисунке 602 изображен пример модели адаптивного фильтра в пространственной области. Процессор 112 (показанный на фиг. 1) может использовать модуль 128 локализации мишени для применения модели адаптивного фильтра, показанного на рисунке 602, к конкретному 2D срезу, который также находится в пространственной области. Посредством применения примерной модели 602 адаптивного фильтра к 2D срезу, процессор 112 может определять для каждого местоположения 2D среза, насколько точно примерная модель 602 адаптивного фильтра согласуется с конкретным местоположением 2D среза. В подходящем случае процессор 112 может вычислить каждый 2D срез приблизительно за 300 мс. Модуль 128 локализации мишени создает примерную карту откликов, которая изображена на рисунке 604. Примерная карта 604 откликов может представлять, насколько точно модель 602 адаптивного фильтра согласуется с каждым местоположением 2D среза. Более яркие зоны, представленные на примерной карте 604 откликов, показывают более точное согласование и, следовательно, более высокую степень достоверности модели 602 адаптивного фильтра в конкретном местоположении 2D среза, чем более темные зоны. Более яркие зоны могут иметь более высокие степени достоверности, чем более темные зоны на карте 604 откликов. Как показано, карта 604 откликов показывает яркую зону 608, которая может соответствовать наибольшей степени достоверности для данного 2D среза, вычисленной процессором 112. Поэтому яркая зона 608 на карте 604 откликов может соответствовать местоположению мишени на данном конкретном 2D срезе. Следовательно, процессор 112 определил местоположение мишени 608, которая находится на данном конкретном 2D срезе. Кроме того, поскольку местоположение анатомических структур пациента, из которых устройством 170 получения изображений создавался 2D срез, процессор 112 может определить местоположение мишени 608 в анатомических структурах пациента, как показано на рисунке 606. Красная зона на рисунке 606 соответствует, например, модели 602 адаптивного фильтра, наложенного на анатомические структуры пациента. В другом варианте осуществления, например, мишень может представлять опухоль.
[0083] В качестве альтернативы, карта откликов, например, может быть представлена в частотной области, в зависимости от того, находятся ли 2D срезы и модель адаптивного фильтра в частотной области. Для создания карты откликов в частотной области процессор 112 может выполнять быстрое преобразование Фурье (БПФ) 2D среза. Процессор 112 применяет модель адаптивного фильтра посредством поточечного перемножения в частотной области. Для создания карты откликов процессор 112 может выполнять обратное быстрое преобразование Фурье.
Дополнительные замечания
[0084] Все публикации, патенты и патентные документы, упомянутые в настоящем документе, полностью включены в настоящую заявку путем отсылки, как если бы отдельно включались путем отсылки. В случае несогласованности применений настоящего документа и документов, включенных в него путем отсылки, применение включенной(ых) ссылки(ок) следует считать дополнительным к применению настоящего документа; в случае противоречивых расхождений, применение в настоящем документе имеет преимущественную силу.
[0085] Примерные раскрытые варианты осуществления описывают системы и способы для отслеживания мишени (например, опухоли) в анатомических структурах пациента в то время, когда пациент проходит радиотерапевтическое лечение. Вышеприведенное описание приведено с целью пояснения. Оно не является ни исчерпывающим и ни ограниченным точными раскрытыми формами или вариантами осуществления. Модификации и видоизменения вариантов осуществления будут очевидны из рассмотрения описания и практического применения раскрытых вариантов осуществления.
[0086] В настоящем документе признаки единственного числа применяются, как принято в патентных документах, для содержания одного или более, чем одного, независимо от любых других случаев или применений выражений «по меньшей мере, один» или «один или более». В настоящем документе союз «или» применяется как неисключающее или, так что «A или B» включает в себя «A, но не B», «B, но не A», и «A и B», если не указано иначе. В настоящем документе выражение «включающее в себя» и «в котором» применяются как прямые английские эквиваленты соответствующих выражений «содержащий» и «где». Кроме того, в последующей формуле изобретения выражения «включающий в себя» и «содержащий» являются неограничивающими, то есть считается, что устройство, система, изделие, композиция, состав, или процедура, которые включают в себя элементы, дополнительные к тем, которые перечислены после упомянутого выражения в пункте формулы изобретения, по-прежнему находятся в пределах объема данного пункта формулы изобретения. Более того, в последующей формуле изобретения прилагательные «первый», «второй», «третий» и т.д. применяются просто как обозначения и не предусматривают никаких нумерационных требований к их объектам.
[0087] Примеры способов, описанные в настоящей заявке, могут быть реализованы по меньшей мере частично аппаратно или в компьютере. Некоторые примеры могут включать в себя компьютерно-читаемый носитель или машиночитаемый носитель, кодированный командами, функционально предназначенными, чтобы настраивать конфигурацию электронного устройства для выполнения способов, описанных в вышеприведенных примерах. Реализация таких способов может включать в себя программный код, например, микрокод, ассемблерный код, код высокоуровневого языка и т.п. Различные программные или программные модули могут быть созданы с использованием множества различных методов программирования программного обеспечения. Например, сегменты программ или программные модули можно разрабатывать в или посредством Java, Python, C, C++, ассемблера или любых известных языков программирования. Один или более таких сегментов или модулей программного обеспечения могут быть интегрированы в компьютерную систему и/или компьютерно-читаемые среды. Упомянутый программный код может включать в себя компьютерно-читаемые команды для выполнения различных способов. Программный код может формировать участки компьютерных программных продуктов или компьютерных программных модулей. Кроме того, в примере программный код может физически на одном или более энергозависимых, долговременных или энергонезависимых компьютерно-читаемых носителях, например, во время выполнения или в другое время. Примеры упомянутых физических компьютерно-читаемых носителей могут включать в себя, но без ограничения, жесткие диски, съемные магнитные диски, съемные оптические диски (например, компактные диски и цифровые видеодиски), магнитные кассеты, карты или флэш накопители, оперативные запоминающие устройства (RAM), постоянные запоминающие устройства (ROM) и т.п.
[0088] Кроме того, хотя выше были описаны наглядные варианты осуществления, объем изобретения включает в себя всевозможные варианты осуществления, содержащие эквивалентные элементы, модификации, изъятия, комбинации (например, аспектов различных вариантов осуществления), видоизменения или изменения, основанные на настоящем описании. Элементы в формуле изобретения подлежат интерпретации в широком смысле на основании языка, используемого в формуле изобретения, и не ограничены примерами, приведенными в настоящем описании или во время подачи заявки, то есть упомянутые примеры следует истолковывать как неисключительные. Кроме того, этапы раскрытых способов можно модифицировать каким угодно образом, в том числе посредством изменения порядка этапов или вставкой, или исключением этапов. Следовательно, предполагается, что описание и примеры следует рассматривать только как примерные, при этом реальные объем и сущность определяются нижеследующей формулой изобретение и всеми ее эквивалентами.
[0089] Вышеприведенное описание предназначено для наглядности, а не для ограничения. Например, вышеописанные примеры (или их один или более аспектов) можно использовать в комбинации друг с другом. Например, специалистом со средним уровнем компетентности в данной области техники, после изучения вышеприведенного описания, могут применяться другие варианты осуществления. Реферат представлен в соответствии с параграфом 1.72(b) статьи 37 Кодекса законов США, чтобы дать читателю возможность быстро понять характер технического сообщения. Реферат представлен в предположении, что его не будут использовать для интерпретации или ограничения объема, или смысла формулы изобретения. Кроме того, в вышеприведенном подробном описании различные признаки могут быть сгруппированы для упрощения описания. Такую группировку нельзя интерпретировать как предполагающую, что незаявленный раскрытый признак является существенным для какого-либо пункта формулы изобретения. Наоборот, предмет изобретения может заключаться не во всех признаках конкретного раскрытого варианта осуществления. Соответственно, нижеследующая формула изобретения входит в подробное описание в виде примеров или вариантов осуществления, при этом каждый пункт формулы изобретения занимает самостоятельное положение как отдельный вариант осуществления, и предполагается, что такие варианты осуществления можно объединять друг с другом в различных комбинациях или с перестановками. Объем изобретения следует определять со ссылкой на прилагаемую формулу изобретения вместе с полным объемом эквивалентов, на которые вправе распространить данную формулу изобретения.
Группа изобретений относится к лучевой терапии или радиотерапии, а именно к системам и способам трехмерного отслеживания опухоли для применения при разработке плана радиотерапевтического лечения, подлежащего использованию во время радиотерапии. Способ локализации и отслеживания подвижной трехмерной (3D) мишени в пациенте, проходящем курс лучевой терапии, с контролем по изображениям, содержит следующие этапы: (a) принимают модель адаптивного фильтра для области интереса в пациенте, при этом модель адаптивного фильтра основана на мишени, подлежащей отслеживанию; (b) получают посредством устройства получения изображений двумерный (2D) срез области интереса в пациенте; (c) применяют посредством процессора модель адаптивного фильтра к 2D срезу, причем модель адаптивного фильтра включает в себя величину смещения; (d) определяют посредством процессора местоположение мишени в 2D срезе на основании модели адаптивного фильтра; (e) оценивают посредством процессора потенциальное местоположение мишени на основании величины смещения; и повторяют посредством процессора этапы (b) - (e) для отслеживания подвижной мишени во время лучевой терапии пациента с контролем по изображениям. Система содержит процессор и память, функционально соединенную с процессором, причем память хранит множество медицинских изображений, множество моделей адаптивных фильтров, протокол сбора данных и компьютерно-выполняемые команды, которые, при выполнении процессором, предписывают процессору выполнять способ. Использование группы изобретений позволяет быстро и точно локализовать подвижную трехмерную мишень. 2 н. и 17 з.п. ф-лы, 6 ил.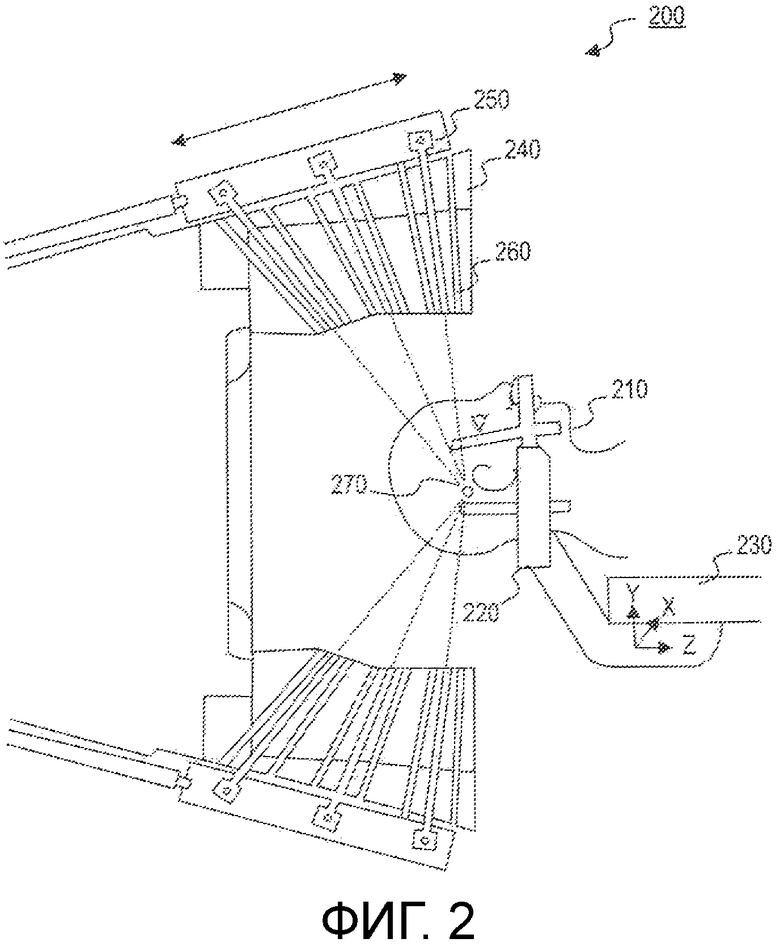
1. Способ локализации и отслеживания подвижной трехмерной (3D) мишени в пациенте, проходящем курс лучевой терапии, с контролем по изображениям, при этом способ содержит следующие этапы:
(a) принимают модель адаптивного фильтра для области интереса в пациенте, при этом модель адаптивного фильтра основана на мишени, подлежащей отслеживанию;
(b) получают посредством устройства получения изображений двумерный (2D) срез области интереса в пациенте;
(c) применяют посредством процессора модель адаптивного фильтра к 2D срезу, причем модель адаптивного фильтра включает в себя величину смещения;
(d) определяют посредством процессора местоположение мишени в 2D срезе на основании модели адаптивного фильтра;
(e) оценивают посредством процессора потенциальное местоположение мишени на основании величины смещения; и
повторяют посредством процессора этапы (b) - (e) для отслеживания подвижной мишени во время лучевой терапии пациента с контролем по изображениям.
2. Способ по п. 1, в котором получение 2D среза основано на предварительно заданном протоколе сбора данных, обеспеченном пользователем.
3. Способ по п. 1, в котором получение 2D среза основано на установленном местоположении мишени.
4. Способ по п. 2, в котором протокол сбора данных включает в себя регулируемый параметр.
5. Способ по п. 4, в котором регулируемый параметр содержит по меньшей мере один из параметра местоположения мишени, параметра ориентации среза, параметра толщины среза и направления движения мишени в пациенте.
6. Способ по п. 1, дополнительно содержащий этап приема прогнозируемого 3D местоположения мишени в пациенте.
7. Способ по п. 1, в котором применение модели адаптивного фильтра содержит применение модели адаптивного фильтра к множеству местоположений в 2D срезе.
8. Способ по п. 1, в котором получение 2D среза дополнительно содержит получение посредством устройства получения изображений множества 2D срезов, при этом каждый 2D срез либо параллелен движению мишени, либо ортогонален движению мишени.
9. Способ по п. 1, в котором 2D срез находится либо в частотной области, либо в пространственной области.
10. Способ по п. 9, в котором как модель адаптивного фильтра, так и 2D срез находятся в частотной области.
11. Способ по п. 9, в котором как модель адаптивного фильтра, так и 2D срез находятся в пространственной области.
12. Способ по п. 1, дополнительно содержащий следующий этап, на котором:
создают посредством процессора карту откликов, при этом карта откликов включает в себя степень достоверности для каждого местоположения 2D среза.
13. Способ по п. 12, в котором степень достоверности указывает, насколько точно модель адаптивного фильтра согласуется с конкретным местоположением 2D среза.
14. Способ по п. 13, в котором более высокая степень достоверности указывает на более высокую степень согласования между моделью адаптивного фильтра и местоположением в 2D срезе.
15. Способ по п. 13, в котором степень достоверности обеспечивает прогнозирование местоположения, в котором расположена мишень в пределах 2D среза.
16. Способ по п. 12, в котором процессор создает одну или более карт откликов для 2D среза, при этом каждая карта откликов соответствует отличающейся модели адаптивного фильтра.
17. Система для локализации и отслеживания подвижной трехмерной (3D) мишени, подлежащей облучению с использованием устройства лучевой терапии с контролем по изображениям в соответствии с планом радиотерапевтического лечения, при этом система содержит:
процессор; и
память, функционально соединенную с процессором, причем память хранит множество медицинских изображений, множество моделей адаптивных фильтров, протокол сбора данных и компьютерно-выполняемые команды, которые, при выполнении процессором, предписывают процессору выполнять способ, содержащий следующие этапы:
(a) принимают из памяти двумерный (2D) срез в соответствии с протоколом сбора данных;
(b) преобразуют посредством процессора 2D срез в конкретную область обработки данных;
(c) применяют посредством процессора модель адаптивного фильтра к 2D срезу, причем модель адаптивного фильтра включает в себя величину смещения;
(d) создают посредством процессора карту откликов для каждой модели адаптивного фильтра, причем карта откликов включает в себя степень достоверности для каждого местоположения 2D среза;
(e) идентифицируют посредством процессора согласование между моделью адаптивного фильтра и одним или более местоположениями в 2D срезе на основании высокой степени достоверности;
(f) определяют посредством процессора местоположение мишени в 2D срезе на основании высокой степени достоверности;
(g) оценивают посредством процессора потенциальное местоположение мишени на основании величины смещения; и вызывают из памяти последующий 2D МРТ-срез и повторяют этапы (b) - (g), чтобы отслеживать подвижную мишень во время лучевой терапии пациента с контролем по изображениям.
18. Система по п. 17, в которой создается множество карт откликов, при этом каждая карта откликов соответствует отличающейся модели адаптивного фильтра.
19. Система по п. 17, в которой степень достоверности указывает, насколько точно модель адаптивного фильтра согласуется с конкретным местоположением 2D среза.
| US 2008159478 A1, 03.07.2008 | |||
| Черный С.А., Частотные и пространственные методы цифровой фильтрации изображений - Молодежный научно-технический вестник, 05.05.2012, сс.1-7 | |||
| WO 2011133606 A2, 27.10.2011 | |||
| WO 2005030330 A1, 07.04.2005 | |||
| US 2012071758 A1, 22.03.2012. |

