Данный способ относится к измерительной технике и может быть использован для определения вместимости и градуировки резервуаров вертикальных цилиндрических.
Известен способ определения вместимости цилиндрических резервуаров, в котором в центре резервуара устанавливают лазерный теодолит и на базовом расстоянии от него - второй теодолит, формируют на внутренней стенке резервуара световую марку от лазерного теодолита, наводят на нее оптическую ось зрительной трубы второго теодолита, последовательно перемещают световую марку вдоль образующей резервуара, определяют для каждого положения световой марки радиус резервуара и оценивают его вместимость [Авторское свидетельство SU 1415059, G01В 11/00, 07.08.1988].
Недостатком данного способа является то, что надо освобождать резервуар от имеющейся в нем жидкости для установления теодолита в его центре, а также большая погрешность в определении вместимости резервуара.
Известен способ, который заключается в определении площадей горизонтальных сечений поясов резервуаров и посредством расчетных методов определения его вместимости [Патент №(11) 2286549. Способ градуировки резервуара для определения вместимости, соответствующей высоте его наполнения. Фторов А.Ю., 2005]. Данный способ предполагает предварительную горизонтальную разбивку исходного сечения резервуара путем измерения длины периметра первого пояса резервуара, с последующим делением периметра на отрезки. Выполняют вертикальную разбивку исходного сечения резервуара методом технического нивелирования. Вертикальной проекцией точек предварительной горизонтальной разбивки на уровень вертикальной разбивки определяют опорные точки исходного горизонтального сечения резервуара. Электронным тахеометром с функцией измерения расстояний в безотражательном режиме и электронной регистрацией данных осуществляют измерение высот поясов резервуара, наклонных расстояний, горизонтальных и вертикальных углов при координировании точек. С учетом полученных данных определяют пространственные координаты опорных точек на периметрах горизонтальных сечений резервуара. Строят трехмерную математическую модель резервуара. На основе построенной модели с использованием математических методов интерполяции определяют площади горизонтальных сечений проверяемого резервуара, по которым рассчитывают вместимость резервуара.
Недостатком этого способа является то, что он основан на интерполяции между измерениями. В результате чего не учитываются изменения вместимости из-за неровности стенок резервуара.
Задачей предлагаемого изобретения является повышение достоверности и точности градуировки резервуара вертикального цилиндрического для определения вместимости, соответствующей высоте его наполнения.
Поставленная задача достигается тем, что согласно изобретению производят построение цифровой векторной трехмерной (3D) модели внешней поверхности резервуара вертикального цилиндрического при наполнении его поверочной жидкостью отдельными фиксированными дозами путем сканирования внешней поверхности резервуара при помощи наземного лазерного сканера с линейной дискретностью шага сканирования в пределах от 2 до 5 мм не менее чем с четырех сканерных станций и в соответствии с эксплуатационной документацией (ЭД) на прибор выполняют объединение сканов между собой, при этом качество объединения полученных данных контролируют путем выполнения следующих условий:
- средняя квадратическая погрешность единицы веса объединения сканов не должна превышать ±3 мм;
- расхождение координат расположения специальных марок не должно превышать ±5 мм;
- средняя квадратическая ошибка определения элементов внешнего ориентирования для линейных величин не должна превышать ±2 мм, а для угловых величин - ±15",
производят обработку данных результатов наземного лазерного сканирования с помощью специального программного обеспечения, позволяющего выполнить привязку сканов к заданной системе координат, причем сканирование и обработку производят каждый раз при заполнении резервуара поверочной жидкостью отдельными фиксированными дозами, передают полученную цифровую информацию в специальную компьютерную программу, в которой, сравнивая полученные модели внешней поверхности резервуара для каждого измерения, получают градуировочную характеристику резервуара в виде цифровой векторной трехмерной (3D) модели внешней поверхности резервуара, соответствующей высоте его наполнения поверочной жидкостью.
Способ поясняется чертежами. На Фиг.1 представлена схема определения углового шага сканирования, на Фиг.2 представлена схема определения зон перекрытия между сканерными станциям, на Фиг.3 представлена схема расположения сканерных станций и связующих марок.
Предлагаемый способ осуществляется следующим образом. Для определения геометрических характеристик резервуара вертикального цилиндрического выбирают шаг сканирования, количество станций и место их расположения. Шаг сканирования должен быть подобран с учетом того, чтобы плотность точек, измеряемых на поверхности резервуара, позволяла с достаточной точностью и достоверностью определять его геометрию, учитывая деформацию стенок резервуара при наполнении его поверочной жидкостью отдельными фиксированными дозами. Также цифровые точечные модели, полученные с разных станций, должны иметь достаточную плотность в зонах перекрытий для качественного объединения их в единую модель. Для выбора необходимого количества станций сканирования и определения зон перекрытия точечных моделей (фиг.1) необходимо определить угловой шаг сканирования ей, при котором расстояние между наиболее близкими к сканеру точками на поверхности резервуара d будет составлять заданное значение:



где: α1· - угловой шаг сканирования;
R - радиус резервуара;
S1 - расстояние от сканера;
φ1 - угловой сектор поверхности резервуара;
D - расстояние от сканера до стенок резервуара.
d1 - расстояние между наиболее близкими к сканеру точками на внешней поверхности резервуара.
Определяют угловой сектор на внешней поверхности резервуара (р max, в пределах которого плотность измеряемых точек будет достаточна, вводят коэффициент k, определяющий максимально допустимую степень разрежения измеряемых точек, определяют допустимый линейный шаг сканирования dmax:

Угол φmax равен двойному углу φi для последнего i-го шага сканирования, для которого должно соблюдаться условие (di-di-1)≤dik.
Определяют расстояние di по формулам:




где αi - угловой шаг сканирования;
i - измеряемая точка.
Кроме φmax определяют угловой сектор резервуара φv, видимый со станции сканирования. Для границы видимого сектора всегда будет соблюдаться условие Av=90°:


где φv - угловой сектор резервуара;
Av - угол между направлениями на крайнюю точку области сканирования и радиуса резервуара;
αv - угол области сканирования.
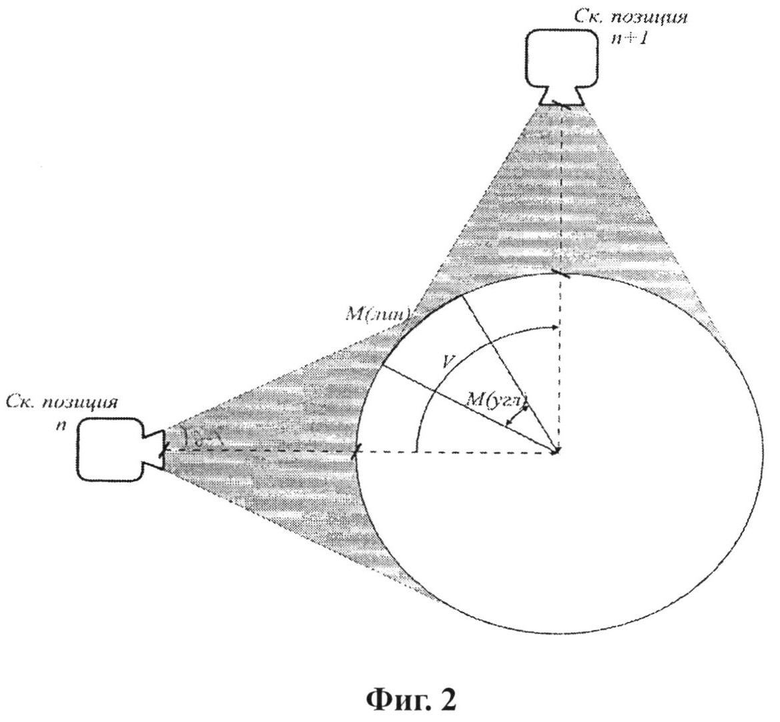
Имея значение φmax, определяют количество станций N (значение округляют вперед до ближайшего целого) и величину перекрытия между станциями М как в угловых величинах mугл, так и в линейных mлин: (Фиг.2):



Вычисляя зоны перекрытия между станциями, можно проектировать места их положения еще до начала полевых работ, что позволяет выбрать оптимальную конфигурацию станций. Величину угловой зоны перекрытия между двумя станциями Мугл вычисляют по формуле:

где φmax (n) - угловой сектор резервуара с достаточным шагом сканирования,
V - угол между осями сканирования в линейном выражении на поверхности резервуара перекрытия
В линейном выражении на поверхности резервуара перекрытие Млин будет равно:

где Mлин - выражение углового сектора резервуара;
R - радиус резервуара, м.
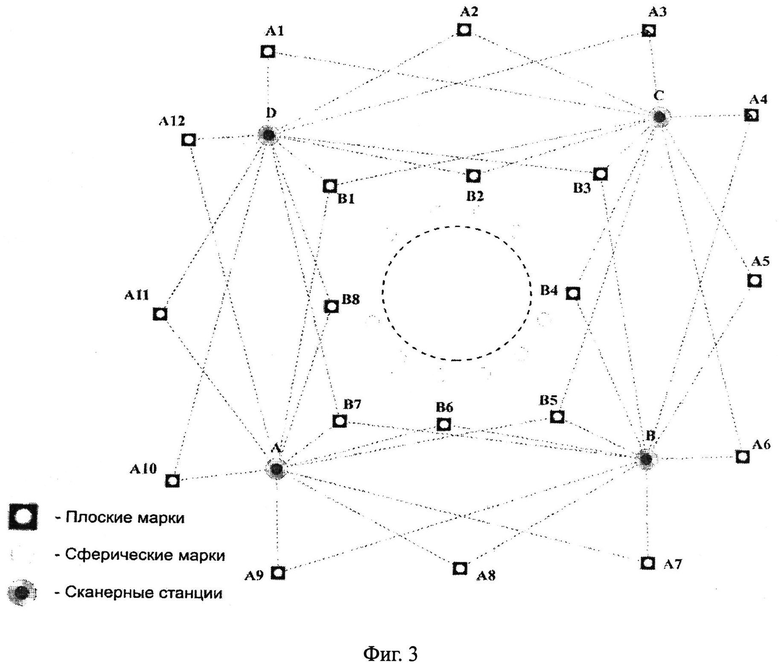
На Фиг.3 приведена оптимальная схема расположения сканерных станций и количество используемых связующих марок при проведении работ по градуировке резервуара вертикального цилиндрического для определения вместимости, соответствующей высоте его наполнения. Снаружи резервуара вертикального цилиндрического устанавливают наземный лазерный сканер и собственной программой обработки данных, принадлежащей данному оборудованию, и в соответствии с эксплуатационной документацией на прибор (ЭД) автоматически определяют координаты точек, принадлежащих внешней поверхности резервуара, выполняют измерение расстояний при помощи встроенного лазерного дальномера, при этом для каждого измерения фиксируют вертикальные и горизонтальные углы, шаг сканирования (расстояние между смежными точками) должен соответствовать вышеизложенным условиям (Фиг.1). Для выполнения сплошной сканерной съемки внешней поверхности резервуара сканирование выполняют с нескольких точек установки прибора (сканерных станций), соответствующих вышеизложенным условиям (Фиг.2), передают результаты сканирования (сканы) в ПЭВМ и с помощью специальной компьютерной программы регистрируют в ней сканы со всех станций и получают цифровую точечную трехмерную (3D) модель внешней поверхности резервуара. Результатом работ является «облако точек» лазерных отражений или «сканы» внешней поверхности резервуара. Производят обработку данных результатов наземного лазерного сканирования с помощью специального программного обеспечения, позволяющего выполнять привязку сканов к заданной системе координат (Фиг.3), производят построение точечной трехмерной (3D) модели внешней поверхности резервуара, передают цифровую точечную трехмерную (3D) модель внешней поверхности резервуара в специальную компьютерную программу и получают цифровую векторную трехмерную (3D) модель внешней поверхности резервуара, при наполнении ее поверочной жидкостью отдельными фиксированными дозами для определения вместимости передают полученную цифровую информацию в специальную компьютерную программу, в которой, сравнивая полученные модели внешней поверхности резервуара для каждого измерения, получают градуировочную характеристику резервуара в виде цифровой векторной трехмерной (3D) модели внешней поверхности резервуара, соответствующей высоте его наполнения поверочной жидкостью.
В настоящее время не существует достоверного геометрического способа определения вместимости резервуара вертикального цилиндрического. Предлагаемый инновационный способ позволит проводить калибровку и градуировку резервуаров вертикальных цилиндрических с относительной погрешностью измерений вместимости резервуара 0,07%. Кроме того, данный способ, основанный на бесконтактном дистанционном методе не требует предварительного освобождения его от нефтепродуктов, зачистку, определение объема внутренних элементов конструкций и других затратных мероприятий, связанных с простоем, а значит - с упущенной коммерческой прибылью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ КРЕНА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО | 2014 |
|
RU2597958C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИН ДЕФОРМАЦИЙ СТЕНКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО | 2015 |
|
RU2581722C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ ОТКЛОНЕНИЯ ОБРАЗУЮЩИХ СТЕНОК РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ВЕРТИКАЛИ | 2014 |
|
RU2572502C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ ОТКЛОНЕНИЯ НАРУЖНОГО КОНТУРА ДНИЩА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ГОРИЗОНТАЛИ | 2015 |
|
RU2590342C1 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ШАРОВОГО (СФЕРИЧЕСКОГО) ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2011 |
|
RU2470266C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТИ ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА | 2012 |
|
RU2509978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ РОВНОСТИ (КОЛЕЙНОСТИ) ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА АВТОМОБИЛЬНОЙ ДОРОГИ | 2016 |
|
RU2625091C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОНТРОЛЬНОЙ ТОЧКИ ОБЪЕКТА С ПРИМЕНЕНИЕМ НАЗЕМНОГО ЛАЗЕРНОГО СКАНЕРА | 2013 |
|
RU2540939C2 |
| СПОСОБ ТРЁХМЕРНОГО (3D) КАРТОГРАФИРОВАНИЯ | 2014 |
|
RU2562368C1 |
Изобретение относится к измерительной технике и может быть использовано для определения вместимости и градуировки резервуаров вертикальных цилиндрических. Способ заключается в том, что производят построение цифровой векторной трехмерной (3D) модели внешней поверхности резервуара при наполнении его поверочной жидкостью отдельными фиксированными дозами путем сканирования внешней поверхности резервуара при помощи наземного лазерного сканера с линейной дискретностью шага сканирования в пределах от 2 до 5 мм не менее чем с четырех сканерных станций и в соответствии с эксплуатационной документацией на прибор. Выполняют объединение сканов между собой, при этом качество объединения полученных данных контролируют путем выполнения следующих условий: средняя квадратическая погрешность единицы веса объединения сканов не должна превышать ±3 мм; расхождение координат расположения специальных марок не должно превышать ±5 мм; средняя квадратическая ошибка определения элементов внешнего ориентирования для линейных величин не должна превышать ±2 мм, а для угловых величин - ±15". Производят обработку данных результатов наземного лазерного сканирования с помощью специального программного обеспечения, позволяющего выполнить привязку сканов к заданной системе координат, причем сканирование и обработку производят каждый раз при заполнении резервуара поверочной жидкостью отдельными фиксированными дозами, передают полученную цифровую информацию в специальную компьютерную программу, где, сравнивая полученные модели внешней поверхности резервуара для каждого измерения, получают градуировочную характеристику резервуара в виде цифровой векторной трехмерной (3D) модели внешней поверхности резервуара, соответствующей высоте его наполнения поверочной жидкостью. Технический результат - повышение достоверности и точности градуировки резервуара вертикального цилиндрического для определения вместимости, соответствующей высоте его наполнения. 3 ил.
Способ градуировки резервуара вертикального цилиндрического для определения вместимости, соответствующей высоте его наполнения, включающий построение трехмерной (3D) модели поверхности вышеупомянутого резервуара, отличающийся тем, что производят построение цифровой векторной трехмерной (3D) модели внешней поверхности резервуара вертикального цилиндрического, при наполнении его поверочной жидкостью отдельными фиксированными дозами путем сканирования внешней поверхности резервуара при помощи наземного лазерного сканера с линейной дискретностью шага сканирования в пределах от 2 до 5 мм не менее чем с четырех сканерных станций и в соответствии с эксплуатационной документацией (ЭД) на прибор выполняют объединение сканов между собой, при этом качество объединения полученных данных контролируют путем выполнения следующих условий:
- средняя квадратическая погрешность единицы веса объединения сканов не должна превышать ±3 мм;
- расхождение координат расположения специальных марок не должно превышать ±5 мм;
- средняя квадратическая ошибка определения элементов внешнего ориентирования для линейных величин не должна превышать ±2 мм, а для угловых величин - ±15",
производят обработку данных результатов наземного лазерного сканирования с помощью специального программного обеспечения, позволяющего выполнить привязку сканов к заданной системе координат, причем сканирование и обработку производят каждый раз при заполнении резервуара поверочной жидкостью отдельными фиксированными дозами, передают полученную цифровую информацию в специальную компьютерную программу, в которой, сравнивая полученные модели внешней поверхности резервуара для каждого измерения, получают градуировочную характеристику резервуара в виде цифровой векторной трехмерной (3D) модели внешней поверхности резервуара, соответствующей высоте его наполнения поверочной жидкостью.
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2005 |
|
RU2286549C1 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2178153C2 |
| УСТРОЙСТВО ГРАДУИРОВКИ РЕЗЕРВУАРОВ | 1999 |
|
RU2174219C2 |
| RU 93007362 A, 30.04.1995 | |||
| WO 2007078221 A1, 12.07.2007 | |||

