Данный способ относится к области геодезического контроля.
Известен способ, который заключается в определении координат контролируемых точек объекта с использованием специальной светоотражающей марки [В.А. Середович, Наземное лазерное сканирование, Новосибирск, СГГА, 2009 г.], взятый в качестве прототипа.
Данный способ предполагает определение координат контрольной точки объекта с использованием специальных светоотражающих марок, которые закрепляются на поверхности контрольного элемента объекта и координируются при помощи встроенной в наземный лазерный сканер (НЛС) функции автоматического распознавания специальных марок.
Недостатком этого способа является то, что он основан на использовании ручного способа закрепления марок, в результате чего снижается точность измерений за счет увеличения влияния человеческого фактора и недостатков алгоритма автоматического определения координат, а также увеличение трудозатрат и снижение уровня безопасности проведения работ.
Задачей предлагаемого изобретения является повышение точности измерения координат контрольных точек объекта и снижение влияния человеческого фактора, а также общее повышение уровня безопасности проведения измерительных работ.
Поставленная задача достигается за счет того, что в предлагаемом изобретении для определения координат контрольной точки объекта с применением наземного лазерного сканера определяют элемент конструкции объекта, который характеризует собой пересечение не менее трех физических плоскостей, устанавливают наземный лазерный сканер на станции, выполняют сканирование контролируемого элемента конструкции объекта при помощи наземного лазерного сканера с линейной дискретностью шага сканирования в пределах от 1 до 10 мм, в результате чего определяют координаты точек отражения лазерного луча от поверхности контролируемого элемента конструкции объекта, передают результаты сканирования (скан) в ПЭВМ, с помощью специальной компьютерной программы регистрируют в ней скан и получают цифровую точечную трехмерную (3D) модель поверхности контролируемого элемента конструкции объекта, производят обработку данных результатов наземного лазерного сканирования с помощью специального программного обеспечения, позволяющего выполнить привязку скана к заданной системе координат, фильтрацию скана для удаления «шумовых» измерений, полученных при отражении от посторонних предметов, в этой же программе моделируют трехмерную виртуальную марку, автоматически апроксимируя векторный геометрический примитив «плоскость» в данные НЛС для каждой из физических плоскостей, виртуально находят точку их пересечения и определяют трехмерные координаты данной точки, при этом средняя квадратическая погрешность аппроксимации векторного геометрического примитива «плоскость» должна быть в соответствии с эксплуатационной документацией (ЭД).
Способ поясняется чертежом. На Фиг.1 представлена схема создания цифровой векторной трехмерной (3D) модели виртуальной марки, образованной за счет пересечения трех аппроксимированных в данные НЛС векторных геометрических примитивов «плоскость».
Предлагаемый способ осуществляется следующим образом.
НЛС устанавливается на расстоянии от 10 до 150 м от контролируемого объекта, визуально определяют область с наличием физического пересечения не менее трех плоскостей конструкции контролируемого объекта и в соответствии с эксплуатационной документацией на прибор (ЭД), производят сканирование этой области и определяют координаты трехмерной виртуальной марки. Выполняют измерение расстояний при помощи встроенного лазерного дальномера, при этом для каждого измерения фиксируют вертикальные и горизонтальные углы. Шаг сканирования или разрешение (расстояние между смежными точками) должен быть в пределах от 1 до 10 мм на поверхности контролируемого объекта. После чего передают результаты сканирования (скан) в ПЭВМ и с помощью специальной компьютерной программы получают цифровую точечную трехмерную (3D) модель поверхности объекта. Результатом работ является «облако точек» лазерных отражений или «скан» поверхности объекта, производят обработку данных результатов наземного лазерного сканирования с помощью специального программного обеспечения, позволяющего выполнить привязку скана к заданной системе координат, фильтрацию скана для удаления «шумовых» измерений, полученных при отражении от посторонних предметов, в этой же программе моделируют трехмерную виртуальную марку, автоматически аппроксимируя векторный геометрический примитив «плоскость» в данные НЛС для каждой из физических плоскостей, являющихся элементами конструкции объекта, виртуально находят точку их пересечения и определяют трехмерные координаты данной точки, при этом средняя квадратическая погрешность аппроксимации векторного геометрического примитива «плоскость» должна быть в соответствии с эксплуатационной документацией (ЭД).
Предлагаемый инновационный способ позволяет определять координаты контрольной точки любых сложных конструкций, используя в качестве геодезической марки любой участок, принадлежащий этим конструкциям. Данный способ, основанный на бесконтактном дистанционном методе наземного лазерного сканирования, позволяет производить геодезический контроль инженерных объектов с высокой точностью, а также повысить безопасность проводимых измерительных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ И ВОССТАНОВЛЕНИЯ ПОЛОЖЕНИЯ ГОРИЗОНТАЛЬНОЙ ОСИ ЛИНЕЙНОГО ИНЖЕНЕРНОГО ОБЪЕКТА | 2015 |
|
RU2591585C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ ОТКЛОНЕНИЯ НАРУЖНОГО КОНТУРА ДНИЩА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ГОРИЗОНТАЛИ | 2015 |
|
RU2590342C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТИ ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА | 2012 |
|
RU2509978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
| Способ количественной оценки эрозионных потерь почвы с применением наземного лазерного сканера | 2018 |
|
RU2700930C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ ОТКЛОНЕНИЯ ОБРАЗУЮЩИХ СТЕНОК РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ВЕРТИКАЛИ | 2014 |
|
RU2572502C1 |
| СПОСОБ ТРЁХМЕРНОГО (3D) КАРТОГРАФИРОВАНИЯ | 2014 |
|
RU2562368C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИН ДЕФОРМАЦИЙ СТЕНКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО | 2015 |
|
RU2581722C1 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2013 |
|
RU2521212C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ РОВНОСТИ (КОЛЕЙНОСТИ) ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА АВТОМОБИЛЬНОЙ ДОРОГИ | 2016 |
|
RU2625091C1 |
Изобретение относится к области геодезического контроля и может быть использовано для определения координат контрольной точки любых сложных конструкций, используя в качестве геодезической марки любой участок, принадлежащий этим конструкциям. Поставленная задача достигается за счет того, что в способе определения координат контрольной точки объекта с применением наземного лазерного сканера, согласно изобретению, предлагается основанный на использовании пересечения трех аппроксимированных в данные наземного лазерного сканирования геометрических примитивов «плоскость». Для этого при помощи НЛС выполняют сканирование заранее визуально определенного контролируемого элемента конструкции объекта с наличием физического пересечения трех плоскостей, с линейной дискретностью шага сканирования в пределах от 1 до 10 мм и средней квадратической погрешностью аппроксимации геометрических примитивов «плоскость» в соответствии с эксплуатационной документацией (ЭД). Далее на основе пересечения трех геометрических примитивов «плоскость» определяют трехмерные координаты точки геометрического центра образованной фигуры, после чего производят построение цифровой векторной трехмерной (3D) модели точки, в пространстве, далее называемой трехмерной виртуальной маркой. Технический результат - повышение точности измерения координат контрольных точек объекта. 1 ил.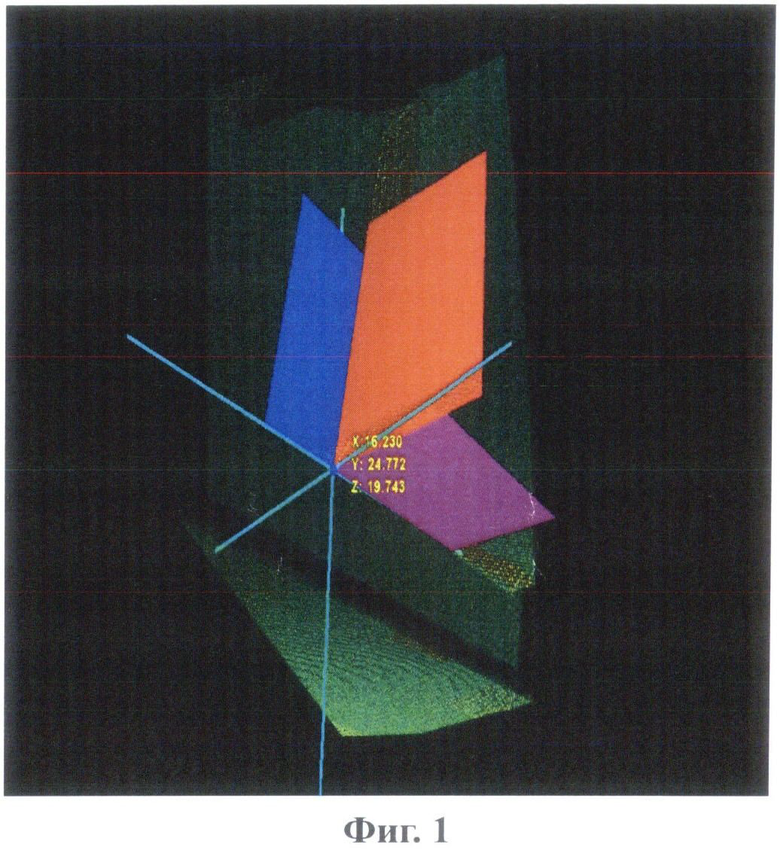
Способ определения координат контрольной точки объекта с применением наземного лазерного сканера, при котором используют специальные геодезические марки, отличающийся тем, что определяют элемент конструкции объекта, который характеризует собой пересечение не менее трех физических плоскостей, устанавливают наземный лазерный сканер на станции, выполняют сканирование контролируемого элемента конструкции объекта при помощи наземного лазерного сканера с линейной дискретностью шага сканирования в пределах от 1 до 10 мм, в результате чего определяют координаты точек отражения лазерного луча от поверхности контролируемого элемента конструкции объекта, передают результаты сканирования (скан) в ПЭВМ, с помощью компьютерной программы регистрируют в ней скан и получают цифровую точечную трехмерную (3D) модель поверхности контролируемого элемента конструкции объекта, производят обработку данных результатов наземного лазерного сканирования, выполняют привязку скана к заданной системе координат, определяют параметры фильтрации для удаления из облака точек лазерных отражений не подлежащих измерению посторонних объектов, производят их фильтрацию в автоматическом режиме, в этой же программе моделируют трехмерную виртуальную марку, автоматически аппроксимируя векторный примитив «плоскость» в данные наземного лазерного сканирования для каждой из физических плоскостей, являющихся элементами конструкции объекта, виртуально находят точку их пересечения и определяют трехмерные координаты данной контрольной точки.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК И ОРИЕНТАЦИИ УЧАСТКОВ ПОВЕРХНОСТИ ТЕЛА СЛОЖНОЙ ФОРМЫ | 1999 |
|
RU2162591C1 |
| RU 2058546 C1, 20.04.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УГЛОВ НАЗЕМНЫМ ЛАЗЕРНЫМ СКАНЕРОМ | 2010 |
|
RU2429449C1 |
| US 20060265177 A1, 23.11.2006 | |||

