Данный способ относится к области геодезического контроля в дорожно-строительной отрасли.
Известен способ определения геометрических параметров дорожного полотна с помощью нивелира и нивелирной рейки ГОСТ №30412-96 «Дороги автомобильные и аэродромы. Методы измерений неровностей оснований и покрытий», утвержден постановлением Минстроя РФ от 5 августа 1996 г. №18-60], взятый в качестве прототипа.
Сущность данного способа состоит в том, что на контролируемом участке проводят измерения с помощью нивелира, последовательно устанавливая нивелирную рейку в местах, обозначенных метками. По данным нивелирования вычисляют относительные отметки точек поверхности основания (покрытия) автомобильной дороги в местах разметки.
Недостатком этого способа является невозможность повторения измерений, так как точки измерений не закрепляются, поэтому невозможно произвести повторные измерения на контролируемом участке.
Кроме того, данный способ предполагает контроль геометрических параметров в дискретных точках автомобильной дороги, что не позволяет достоверно оценить качество поверхности дорожного полотна в целом. Также, данный способ предполагает наличие человеческого фактора в процессе контроля, что ведет к снижению достоверности и точности измерения.
Задачей предлагаемого изобретения является разработка способа определения состояния поверхности покрытия автомобильной дороги по ее геометрическим параметрам: земляного полотна, слоев щебеночного основания и слоев покрытия с применением наземного лазерного сканера.
Поставленная задача достигается тем, что в способе определения состояния поверхности покрытия автомобильной дороги по ее геометрическим параметрам вычисляют относительные отметки точек поверхности покрытия и, согласно изобретению, выполняют планово-высотное обоснование сканерной съемки на измеряемом участке автомобильной дороги, устанавливают наземный лазерный сканер на точку планово-высотного обоснования, выполняют сканирование участка с точек планово-высотного обоснования, в результате чего определяют пространственные координаты по осям X, Y, Z точек отражения лазерного луча от поверхности автомобильной дороги и ее элементов, где координаты оси Z соответствуют относительным высотным отметкам высотной сети, получают скан, выполняют вышеупомянутые действия на станциях, расположенных через 20-50 метров вдоль оси дороги, передают результаты сканирования (сканы) в компьютерную программу, регистрируют в ней сканы со всех станций и получают фактическую цифровую точечную трехмерную (3D) модель поверхности покрытия измеряемого участка автомобильной дороги, передают ее в ПЭВМ и с помощью специальной компьютерной программы получают фактическую цифровую векторную трехмерную (3D) модель поверхности покрытия измеряемого участка автомобильной дороги, в этой же программе моделируют проектную цифровую трехмерную модель поверхности измеряемого участка покрытия автомобильной дороги, используя проектные значения соответствующих геометрических параметров, совмещают ее с полученной фактической цифровой векторной трехмерной (3D) моделью поверхности покрытия измеряемого участка автомобильной дороги и формируют с заданной дискретностью поперечные сечения, в автоматическом режиме определяют расхождения между значениями измеряемых геометрических параметров на основе полученных пространственных координат по оси Z фактической цифровой векторной трехмерной (3D) модели и соответствующими значениями проектной цифровой векторной трехмерной (3D) модели поверхности покрытия измеряемого участка автомобильной дороги, сравнивая полученные данные с соответствующими требованиями нормативных документов делается вывод о состоянии поверхности покрытия автомобильной дороги, необходимый для комплексной оценки качества при строительстве или содержании автомобильных дорог.
Способ поясняется чертежами.
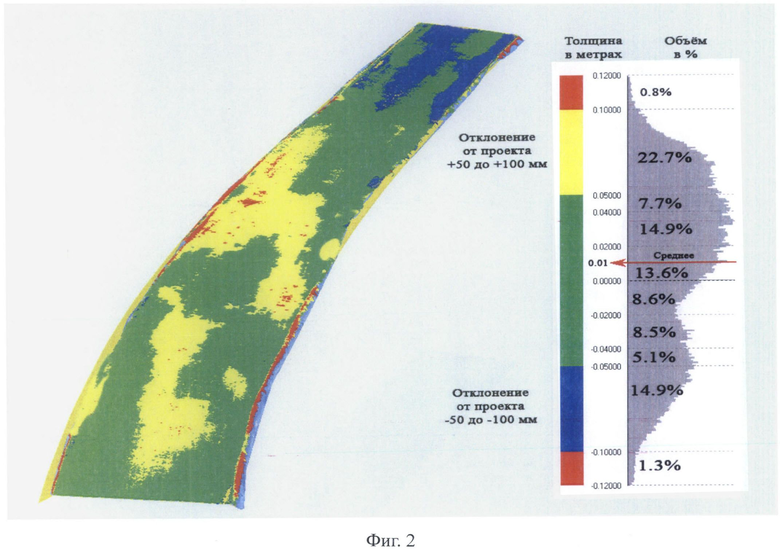
На Фиг.1 представлена схема создания фактической цифровой векторной трехмерной (3D) модели измеряемого участка автомобильной дороги и ее элементов. На Фиг.2 представлена схема сравнения геометрических параметров поверхности покрытия измеряемого участка автомобильной дороги и ее элементов с помощью проектной цифровой трехмерной модели.
Предлагаемый способ осуществляется следующим образом. Используя проектные данные измеряемых геометрических параметров, строят проектную цифровую трехмерную (3D) модель поверхности измеряемого участка автомобильной дороги и ее элементов. Построение указанной модели осуществляется посредством любого известного продукта, например AutoCAD. На измеряемом участке автомобильной дороги устанавливают наземный лазерный сканер и собственной программой обработки данных, принадлежащей данному оборудованию, и в соответствии с эксплуатационной документацией на прибор (ЭД) автоматически определяют координаты точек, принадлежащие поверхности покрытия измеряемого участка дорожного полотна. Выполняют измерение расстояний при помощи встроенного лазерного дальномера, при этом для каждого измерения фиксируют вертикальные и горизонтальные углы, шаг сканирования (расстояние между смежными точками) должен составлять не менее 100 мм на поверхности покрытия дорожного полотна. Для выполнения сплошной сканерной съемки измеряемого участка автомобильной дороги сканирование выполняют с нескольких точек установки прибора (сканерных станций), передают результаты сканирования (сканы) в ПЭВМ и с помощью специальной компьютерной программы, регистрируют (сшивают) в ней сканы со всех станций и получают фактическую цифровую точечную трехмерную (3D) модель поверхности автомобильной дороги или ее элементов. Расстояние между сканерными станциями должно составлять 20-50 метров. Результатом работ является «облако точек» лазерных отражений или «сканы» поверхности дорожного полотна. (Фиг.1). Производят обработку данных результатов наземного лазерного сканирования с помощью специального программного обеспечения, позволяющего выполнить привязку сканов к заданной системе координат, фильтрацию сканов для удаления измерений, полученных при отражении от посторонних предметов, разрежение сканов до плотности точек на поверхности покрытия автомобильной дороги не менее 25 точек на 1 кв. м, производят построение фактической цифровой точечной трехмерной (3D) модели поверхности покрытия дорожного полотна, передают фактическую цифровую точечную трехмерную (3D) модель поверхности покрытия автомобильной дороги и ее элементов в специальную компьютерную программу и получают цифровую векторную трехмерную (3D) модель поверхности автомобильной дороги и ее элементов, производят редактирование фактической цифровой векторной модели в программном продукте AutoCAD, строят проектную цифровую трехмерную модель поверхности автомобильной дороги и ее элементов, используя проектные значения геометрических параметров поверхности автомобильной дороги и ее элементов, совмещают ее с полученной фактической цифровой векторной 3D моделью, формируют с заданной дискретностью поперечные сечения, в автоматическом режиме распознают расхождения между значениями измеряемых геометрических параметров фактической цифровой векторной трехмерной модели и ее значениями в проектной цифровой трехмерной 3D моделью измеряемого участка поверхности автомобильной дороги и ее элементов, сравнивая полученные данные с соответствующими требованиями нормативных документов, делается вывод о состоянии поверхности покрытия автомобильной дороги, необходимый для определения фактического уровня качества выполненных работ при комплексной оценке содержания, строительства, ремонта и реконструкции автомобильных дорог. (Фиг.2).
В целях повышения точности и достоверности при оценке качества всех основных элементов, параметров и характеристик автомобильных дорог, определяющих их транспортно-эксплуатационное состояние, целесообразно автоматизировать весь процесс мониторинга состояния покрытия и обустройства автодороги. Геодезические измерения, выполненные методом наземного лазерного сканирования, позволяют получить объективную оценку измеряемого участка автомобильной дороги и ее элементов:
- земляного полотна;
- слоев щебеночного основания;
- и покрытия с точностью, соответствующей действующим международным нормативным документам.
Полученные лазерным сканированием результаты, представленные в виде «облака точек» всего объекта измерений, интерпретируются в контролируемые по нормативным документам параметры автодороги по требуемым сечениям (реперам):
- продольные и поперечные уклоны;
- высотные отметки;
- ширина полотна и ее ось;
- и другие (откосы, обочины, дорожные знаки и инженерные сооружения).
Полученные лазерным сканированием результаты методом наложения на проектные величины (ширина, высотные отметки, ровность, уклоны и другие) сравниваются с ними и выявляются в автоматическом режиме имеющаяся погрешность и ее соответствие проектным и нормативным значениям.
Предлагаемый инновационный способ позволяет повысить достоверность оценки геометрических параметров поверхности покрытия дорожного полотна при контроле качества строительства и эксплуатации автомобильных дорог.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ АВТОМОБИЛЬНОЙ ДОРОГИ И ХАРАКТЕРИСТИК ПРИДОРОЖНОЙ ПОЛОСЫ | 2016 |
|
RU2614082C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ РОВНОСТИ (КОЛЕЙНОСТИ) ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА АВТОМОБИЛЬНОЙ ДОРОГИ | 2016 |
|
RU2625091C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТИ ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА | 2012 |
|
RU2509978C1 |
| Способ мониторинга дорожного полотна автомобильных дорог | 2021 |
|
RU2762538C1 |
| СПОСОБ ТРЁХМЕРНОГО (3D) КАРТОГРАФИРОВАНИЯ | 2014 |
|
RU2562368C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ ОТКЛОНЕНИЯ ОБРАЗУЮЩИХ СТЕНОК РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ВЕРТИКАЛИ | 2014 |
|
RU2572502C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ВОССТАНОВЛЕНИЯ ПОЛОЖЕНИЯ ГОРИЗОНТАЛЬНОЙ ОСИ ЛИНЕЙНОГО ИНЖЕНЕРНОГО ОБЪЕКТА | 2015 |
|
RU2591585C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ ОТКЛОНЕНИЯ НАРУЖНОГО КОНТУРА ДНИЩА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ГОРИЗОНТАЛИ | 2015 |
|
RU2590342C1 |
| СПОСОБ ПОЛУЧЕНИЯ, ОБРАБОТКИ И ОТОБРАЖЕНИЯ ГЕОПРОСТРАНСТВЕННЫХ ДАННЫХ В ФОРМАТЕ 3D С ПРИМЕНЕНИЕМ ТЕХНОЛОГИИ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2591173C1 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2013 |
|
RU2521212C1 |
Изобретение относится к области геодезического контроля в дорожно-строительной отрасли. Техническим результатом изобретения является определение достоверных и точных значений геометрических параметров поверхности покрытия автомобильной дороги с помощью наземного лазерного сканера. Согласно способу определения состояния поверхности покрытия автомобильной дороги по ее геометрическим параметрам, вычисляют относительные отметки точек поверхности покрытия и выполняют планово-высотное обоснование на измеряемом участке автомобильной дороги. Определяют пространственные координаты по осям X, Y, Z точек отражения лазерного луча от поверхности автомобильной дороги и ее элементов. Передают результаты сканирования в компьютерную программу. Регистрируют в ней сканы со всех станций и получают фактическую цифровую точечную трехмерную (3D) модель поверхности покрытия измеряемого участка автомобильной дороги и с помощью специальной компьютерной программы получают фактическую цифровую векторную трехмерную (3D) модель поверхности покрытия измеряемого участка автомобильной дороги. Моделируют проектную цифровую трехмерную модель поверхности покрытия измеряемого участка автомобильной дороги, совмещают ее с полученной фактической цифровой векторной трехмерной (3D) моделью поверхности покрытия измеряемого участка автомобильной дороги и формируют с заданной дискретностью поперечные сечения. Определяют расхождения между значениями измеряемых геометрических параметров и соответствующими значениями проектной цифровой векторной трехмерной (3D) модели поверхности покрытия измеряемого участка автомобильной дороги. 2 ил.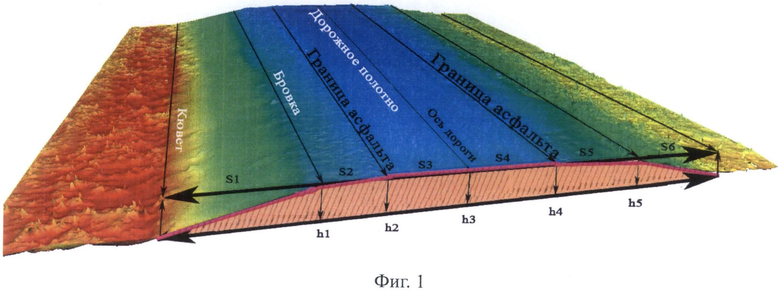
Способ определения состояния поверхности покрытия автомобильной дороги по ее геометрическим параметрам, при котором вычисляют относительные отметки точек поверхности покрытия, отличающийся тем, что выполняют планово-высотное обоснование сканерной съемки на измеряемом участке автомобильной дороги, устанавливают наземный лазерный сканер на точку планово-высотного обоснования, выполняют сканирование участка с точек планово-высотного обоснования, в результате чего определяют пространственные координаты по осям X, Y, Z точек отражения лазерного луча от поверхности автомобильной дороги, где координаты оси Z соответствуют относительным высотным отметкам высотной сети, получают скан, выполняют вышеупомянутые действия на станциях, расположенных через 20-50 метров вдоль оси дороги, передают результаты сканирования (сканы) в компьютерную программу, регистрируют в ней сканы со всех станций и получают фактическую цифровую точечную трехмерную (3D) модель поверхности покрытия измеряемого участка автомобильной дороги, передают ее в ПЭВМ и с помощью специальной компьютерной программы получают фактическую цифровую векторную трехмерную (3D) модель поверхности покрытия измеряемого участка автомобильной дороги, в этой же программе моделируют проектную цифровую трехмерную модель поверхности измеряемого участка автомобильной дороги, используя проектные значения соответствующих геометрических параметров, совмещают ее с полученной фактической цифровой векторной трехмерной (3D) моделью поверхности покрытия измеряемого участка автомобильной дороги и формируют с заданной дискретностью поперечные сечения, в автоматическом режиме определяют расхождения между значениями измеряемых геометрических параметров на основе полученных пространственных координат по оси Z фактической цифровой векторной трехмерной (3D) модели и соответствующими значениями проектной цифровой векторной трехмерной (3D) модели поверхности покрытия измеряемого участка автомобильной дороги, сравнивая полученные данные с соответствующими требованиями нормативных документов, делается вывод о состоянии поверхности покрытия автомобильной дороги.
| Способ возведения перегородки | 1931 |
|
SU30412A1 |
| Методы измерений неровностей оснований и покрытий" | |||
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ПРОЕКЦИОННЫХ РАЗМЕРОВ ОБЪЕКТА И ПОЛУЧЕНИЯ ЕГО ТРЕХМЕРНОЙ МОДЕЛИ | 2005 |
|
RU2311615C2 |
| Электростатический микрофон | 1930 |
|
SU24003A1 |
| Конденсационное устройство для паровых машин | 1926 |
|
SU8402A1 |

