Данный способ относится к области геодезического контроля в дорожно-строительной оценки. Известен способ оценки неровности поверхности основания (покрытия) автомобильной дороги с помощью нивелира и нивелирной рейки. [ГОСТ №30412-96 «Дороги автомобильные и аэродромы. Методы измерений неровностей оснований и покрытий», Москва. 1996 г.]. Сущность данного способа состоит в том, что на контролируемом участке проводят измерения с помощью нивелира, последовательно устанавливая нивелирную рейку в местах, обозначенных метками. По данным нивелирования вычисляют относительные отметки точек поверхности основания (покрытия) автомобильной дороги в местах разметки. Недостатком этого способа является невозможность повторения измерений, так как точки измерений не закрепляются, поэтому невозможно произвести повторные измерения на контролируемом участке. Также известен способ оценки неровности поверхности основания (покрытия) автомобильной дороги путем измерения просветов в контрольных точках под трехметровой рейкой [СНиП №3.06.03-85 «Автомобильные дороги», утвержден постановлением Госстроя СССР №133 от 20 августа 1985 г.], взятый в качестве прототипа. Данный способ заключается в том, что измерение просветов под трехметровой рейкой производят клиновым промерником в пяти контрольных точках, расположенных на расстоянии 0,5 м от концов рейки и друг от друга. При этом на контролируемом участке производят 100-130 измерений просветов (25-30 приложений рейки), обеспечивая при этом измерения только 10% длины контролируемого участка. Недостатком этого способа является то, что данный способ предполагает контроль геометрических параметров на небольших участках дороги, что не позволяет достоверно оценить качество поверхности дорожного полотна на других участках. Кроме того, данный способ предполагает наличие человеческого фактора в процессе контроля, что ведет к снижению достоверности и точности измерения. Задачей предполагаемого изобретения является разработка способа определения неровности поверхности покрытия дорожного полотна с применением наземного лазерного сканера. Техническим результатом изобретения является определение достоверных и точных значений геометрических параметров поверхности покрытия дорожного полотна с применением наземного лазерного сканера. Поставленная задача достигается тем, что в способе определения неровности поверхности покрытия дорожного полотна измеряют просветы под трехметровой рейкой и согласно изобретению устанавливают наземный лазерный сканер на станции на контролируемом участке дорожного полотна, выполняют сканирование участка дорожного полотна со станции, в результате чего определяют координаты точек отражения лазерного луча от поверхности дорожного полотна, получают скан, выполняют вышеупомянутые действия на станциях, расположенных через 20-50 м вдоль оси дороги, передают результаты сканирования (сканы) в ПЭВМ и с помощью специальной компьютерной программы регистрируют в ней сканы со всех станций и получают цифровую точечную трехмерную (3D) модель поверхности дорожного полотна, передают цифровую точечную трехмерную (3D) модель поверхности дорожного полотна в специальную компьютерную программу и получают цифровую векторную трехмерную (3D) модель поверхности дорожного полотна, в этой же программе виртуально моделируют вышеупомянутую трехметровую рейку и прикладывают ее к полученной цифровой векторной трехмерной (3D) модели поверхности дорожного полотна поочередно и непрерывно вдоль запланированного направления, причем эта рейка должна соприкасаться с поверхностью дорожного полотна в двух крайних точках, каждый раз определяют просветы между виртуальной трехметровой рейкой и цифровой, векторной трехмерной (3D) моделью поверхности дорожного полотна через заданные интервалы вдоль рейки, вычисляют неровность поверхности покрытия дорожного полотна по формуле (I):

где:
n - номер контролируемой точки,
δi - значение просвета под виртуальной рейкой,
H1…Hi - отметки контролируемых точек,
i=0…n - количество секций рейки (по умолчанию 6 секций по 0,5 м).
Способ поясняется чертежами. На Фиг.1 представлена схема создания цифровой векторной трехмерной (3D) модели поверхности покрытия контролируемого участка дорожного полотна. На Фиг.2 представлена схема измерения неровности поверхности покрытия контролируемого участка дорожного полотна с помощью виртуальной рейки.
Предлагаемый способ осуществляется следующим образом. На контролируемом участке автомобильной дороги устанавливают наземный лазерный сканер и собственной программой обработки данных, принадлежащей данному оборудованию, и в соответствии с эксплуатационной документацией на прибор (ЭД) автоматически определяют координаты точек, принадлежащих поверхности покрытия контролируемого участка дорожного полотна.
Выполняют измерение расстояний при помощи встроенного лазерного дальномера, при этом для каждого измерения фиксируют вертикальные и горизонтальные углы, шаг сканирования (расстояние между смежными точками) должен составлять не менее 100 мм на поверхности покрытия дорожного полотна. Для выполнения сплошной сканерной съемки контролируемого участка автомобильной дороги сканирование выполняют с нескольких точек установки прибора (сканерных станций), передают результаты сканирования (сканы) в ПЭВМ и с помощью специальной компьютерной программы сшивают в ней сканы со всех станций и получают цифровую точечную трехмерную (3D) модель поверхности дорожного полотна. Расстояние между сканерными станциями должно составлять 20-50 м. Результатом работ является «облако точек» лазерных отражений или «сканы» поверхности дорожного полотна. (Фиг.1). Производят обработку данных результатов наземного лазерного сканирования с помощью специального программного обеспечения, позволяющего выполнить привязку сканов к заданной системе координат, фильтрацию сканов для удаления измерений, полученных при отражении от посторонних предметов, разрежение сканов до плотности точек на поверхности покрытия дорожного полотна не менее 25 точек на 1 кв. м, производят построение цифровой точечной трехмерной (3D) модели поверхности покрытия дорожного полотна, передают цифровую точечную трехмерную (3D) модель поверхности покрытия дорожного полотна в специальную компьютерную программу и получают цифровую векторную трехмерную (3D) модель поверхности покрытия дорожного полотна, в этой же программе виртуально моделируют вышеупомянутую трехметровую рейку и прикладывают ее к полученной цифровой векторной трехмерной (3D) модели поверхности покрытия дорожного полотна поочередно и непрерывно вдоль заданного направления, причем эта рейка должна соприкасаться с поверхностью покрытия дорожного полотна в двух крайних точках, каждый раз определяют просветы между виртуальной трехметровой рейкой и цифровой векторной трехмерной (3D) моделью поверхности покрытия дорожного полотна через заданные интервалы вдоль рейки, вычисляют неровность поверхности покрытия
дорожного полотна по формуле (I):
где:
n - номер контролируемой точки,
δi - значение просвета под виртуальной рейкой,
H1…Hi - отметки контролируемых точек,
i=0…n - количество секций рейки (по умолчанию 6 секций по 0,5 м).
Учитывая значительный рост международных автомобильных перевозок, целесообразно оценивать ровность автомобильных дорог в соответствии с международными стандартами. Предлагаемый инновационный способ позволяет повысить достоверность оценки ровности поверхности покрытия дорожного полотна при контроле качества строительства и эксплуатации автомобильных дорог.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ РОВНОСТИ (КОЛЕЙНОСТИ) ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА АВТОМОБИЛЬНОЙ ДОРОГИ | 2016 |
|
RU2625091C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
| Устройство для оценки состояния дорожного покрытия | 2020 |
|
RU2732728C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ АВТОМОБИЛЬНОЙ ДОРОГИ И ХАРАКТЕРИСТИК ПРИДОРОЖНОЙ ПОЛОСЫ | 2016 |
|
RU2614082C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОНТРОЛЬНОЙ ТОЧКИ ОБЪЕКТА С ПРИМЕНЕНИЕМ НАЗЕМНОГО ЛАЗЕРНОГО СКАНЕРА | 2013 |
|
RU2540939C2 |
| СПОСОБ ТРЁХМЕРНОГО (3D) КАРТОГРАФИРОВАНИЯ | 2014 |
|
RU2562368C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ ОТКЛОНЕНИЯ НАРУЖНОГО КОНТУРА ДНИЩА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ГОРИЗОНТАЛИ | 2015 |
|
RU2590342C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ВОССТАНОВЛЕНИЯ ПОЛОЖЕНИЯ ГОРИЗОНТАЛЬНОЙ ОСИ ЛИНЕЙНОГО ИНЖЕНЕРНОГО ОБЪЕКТА | 2015 |
|
RU2591585C1 |
| Способ мониторинга дорожного полотна автомобильных дорог | 2021 |
|
RU2762538C1 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2013 |
|
RU2521212C1 |

Изобретение относится к области геодезического контроля в дорожно-строительной отрасли. В способе определения неровности поверхности покрытия дорожного полотна измеряют просветы под трехметровой рейкой и согласно изобретению устанавливают наземный лазерный сканер на станции на контролируемом участке дорожного полотна. Выполняют сканирование участка дорожного полотна со станции, в результате чего определяют координаты точек отражения лазерного луча от поверхности дорожного полотна; получают скан, выполняют вышеупомянутые действия на станциях, расположенных через 20-50 м вдоль оси дороги. Потом передают результаты сканирования (сканы) в ПЭВМ и с помощью специальной компьютерной программы регистрируют в ней сканы со всех станций и получают цифровую точечную трёхмерную (3D) модель поверхности дорожного полотна, передают цифровую точечную трёхмерную (3D) модель поверхности дорожного полотна в специальную компьютерную программу и получают цифровую векторную трёхмерную (3D) модель поверхности дорожного полотна, в этой же программе виртуально моделируют вышеупомянутую трехметровую рейку и прикладывают ее к полученной цифровой векторной трехмерной (3D) модели поверхности дорожного полотна, поочередно и непрерывно вдоль запланированного направления, причем эта рейка должна соприкасаться с поверхностью дорожного полотна в двух крайних точках, каждый раз определяют просветы между виртуальной трёхметровой рейкой и цифровой векторной трехмерной (3D) моделью поверхности дорожного полотна через заданные интервалы вдоль рейки и вычисляют неровность поверхности покрытия дорожного полотна по формуле. Технический результат - определение достоверных и точных значений геометрических параметров поверхности дорожного полотна с применением наземного лазерного сканера. 2 ил.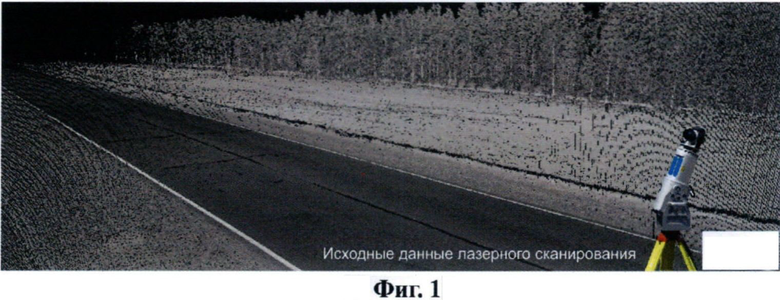
Способ определения неровности поверхности покрытия дорожного полотна, при котором измеряют просветы под трехметровой рейкой, отличающийся тем, что устанавливают наземный лазерный сканер на станции на контролируемом участке дорожного полотна, выполняют сканирование участка дорожного полотна со станции, в результате чего определяют координаты точек отражения лазерного луча от поверхности дорожного полотна, получают скан, выполняют вышеупомянутые действия на станциях, расположенных через 20-50 м вдоль оси дороги, передают результаты сканирования (сканы) в компьютерную программу, регистрируют в ней сканы со всех станций и получают цифровую точечную трехмерную (3D) модель поверхности дорожного полотна, передают цифровую точечную трехмерную (3D) модель поверхности дорожного полотна в ПЭВМ и с помощью специальной компьютерной программы получают цифровую векторную трехмерную (3D) модель поверхности дорожного полотна, в этой же программе виртуально моделируют вышеупомянутую трехметровую рейку и прикладывают её к полученной цифровой векторной трехмерной (3D) модели поверхности дорожного полотна поочередно и непрерывно вдоль запланированного направления, причем эта рейка должна соприкасаться с поверхностью дорожного полотна в двух крайних точках, каждый раз определяют просветы между виртуальной трёхметровой рейкой и цифровой векторной трехмерной (3D) моделью поверхности дорожного полотна через заданные интервалы вдоль рейки, вычисляют неровность поверхности покрытия дорожного полотна по формуле:

где:
n - номер контролируемой точки,
δi - значение просвета под виртуальной рейкой,
H1…Hi - отметки контролируемых точек,
i=0…n - количество секций рейки (по умолчанию 6 секций по 0,5 м).
| СПОСОБ МОНИТОРИНГА АВТОМОБИЛЬНОЙ ДОРОГИ | 2002 |
|
RU2226673C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373324C1 |
| Щипцовый захват для подъемного крана | 1948 |
|
SU72981A1 |
| US 6044698 A, 04.04.2000. | |||

