Данный способ относится к области геодезического контроля резервуаров вертикальных цилиндрических стальных и может быть использован при геодезических наблюдениях за деформациями стальных и железобетонных резервуаров вертикальных цилиндрических, предназначенных для хранения и проведения торговых операций с нефтью, нефтепродуктами и прочими жидкостями, а также при их техническом диагностировании и поверке.
Известен способ определения геометрических параметров резервуара геодезическими методами [ГОСТ 8.570-2000 «Резервуары стальные вертикальные цилиндрические. Методика поверки», утвержден Постановлением Государственного комитета РФ по стандартизации и метрологии от 23 апреля 2001 г. №185-ст., введен в действие с 1 января 2002 г.], взятый в качестве прототипа.
Сущность данного способа состоит в том, что определение величины отклонения образующих стенок резервуара вертикального цилиндрического от вертикали определяется при помощи шаблонов, отвесов и геодезическими методами с помощью измерительной каретки с теодолитом.
Недостатком этого способа является низкая точность и высокая трудоемкость, так как измерения необходимо выполнять вдоль каждого вертикального шва. Кроме того, данный способ предполагает контроль геометрических параметров в дискретных точках, что не позволяет достоверно оценить качество поверхности резервуара, а значит его состояние в целом. Также данный способ предполагает наличие человеческого фактора в процессе контроля, что также ведет к снижению достоверности и точности.
Задачей предлагаемого изобретения является повышение точности и достоверности определения величины отклонения образующих стенок резервуара вертикального цилиндрического от вертикали.
Поставленная задача достигается тем, что в способе определения величины отклонения образующих стенок резервуара вертикального цилиндрического от вертикали геодезическим методом по внешней поверхности вышеупомянутого резервуара согласно изобретению производят сканирование внешней поверхности резервуара при помощи наземного лазерного сканера с линейной дискретностью шага сканирования в пределах от 0,5 до 4 см не менее чем с четырех сканерных станций на расстоянии от 15 до 25 м от резервуара, определяют пространственные координаты по осям Χ, Υ, Ζ точек отражения лазерного луча от поверхности резервуара в условной системе координат. Выполняют регистрацию сканов между собой, производят обработку данных результатов наземного лазерного сканирования с помощью программного обеспечения, далее формируют образующие боковой поверхности резервуара с любым интервалом путем сечения цифровой векторной трехмерной (3D) модели внешней боковой поверхности резервуара вертикальной плоскостью, а на самой образующей формируют точки с любым шагом и получают цифровую векторную трехмерную (3D) модель образующей в местах сечения. Выполняют упомянутые действия по всем образующим. Передают полученную цифровую информацию в компьютерную программу, в этой же программе моделируют проектную цифровую трехмерную модель образующих стенок резервуара, используя их проектные значения. Совмещают ее с полученной фактической цифровой векторной трехмерной (3D) моделью образующих стенок резервуара. В автоматическом режиме определяют расхождения между фактическими и проектными значениями, получают величины отклонения образующих стенок вышеупомянутого резервуара от вертикали.
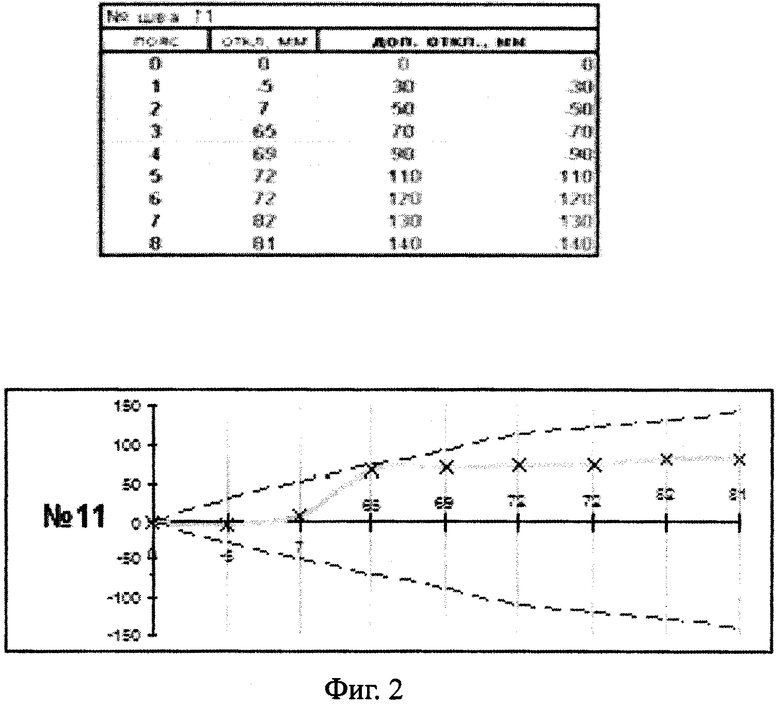
Способ поясняется чертежами. На фиг. 1 представлена общая схема работы предлагаемого способа. На фиг. 2 представлен пример оформления результатов в форме графиков и таблиц с указанием допустимых величин отклонений образующих от вертикали.
Предлагаемый способ осуществляется следующим образом. Для определения геометрических характеристик резервуара вертикального цилиндрического выбирают шаг сканирования, количество станций и место их расположения. Шаг сканирования должен быть подобран с учетом того, чтобы плотность точек, измеряемых на поверхности резервуара, позволяла с достаточной точностью и достоверностью определять его геометрию, учитывая деформацию стенок резервуара при его заполнении. Также цифровые точечные модели, полученные с разных станций, должны иметь достаточную плотность в зонах перекрытий, для качественного объединения их в единую модель (см. фиг. 1). Снаружи резервуара вертикального цилиндрического устанавливают наземный лазерный сканер и собственной программой обработки данных, принадлежащей данному оборудованию, и в соответствии с эксплуатационной документацией на прибор (ЭД) автоматически определяют координаты точек, принадлежащих внешней поверхности резервуара, выполняют измерение расстояний при помощи встроенного лазерного дальномера, при этом для каждого измерения фиксируют вертикальные и горизонтальные углы, шаг сканирования. Для выполнения сплошной сканерной съемки внешней поверхности резервуара сканирование выполняют с нескольких точек установки прибора (сканерных станций), передают результаты сканирования (сканы) в ПЭВМ, с помощью компьютерной программы регистрируют в ней сканы со всех станций и получают цифровую точечную трехмерную (3D) модель внешней поверхности резервуара. Результатом работ является «облако точек» лазерных отражений или «сканы» внешней поверхности резервуара. Производят обработку данных результатов наземного лазерного сканирования с помощью программного обеспечения, позволяющего выполнять привязку сканов к заданной системе координат, производят построение точечной трехмерной (3D) модели внешней поверхности резервуара, передают цифровую точечную трехмерную (3D) модель внешней поверхности резервуара в компьютерную программу и получают цифровую векторную трехмерную (3D) модель внешней поверхности резервуара, передают полученную цифровую информацию в компьютерную программу, в этой же программе моделируют проектную цифровую трехмерную модель образующих стенок резервуара, используя их проектные значения, совмещают ее с полученной фактической цифровой векторной трехмерной (3D) моделью образующих стенок резервуара, в автоматическом режиме определяют расхождения между фактическими и проектными значениями, получают величины отклонения образующих стенок вышеупомянутого резервуара от вертикали (см. фиг. 2).
В настоящее время не существует достоверного геометрического способа определения величины отклонения образующих стенок резервуара вертикального цилиндрического от вертикали. Предлагаемый инновационный способ позволит проводить техническое диагностирование и поверку резервуаров вертикальных цилиндрических с относительной погрешностью измерений 0,07%. Кроме того, данный способ, основанный на бесконтактном дистанционном методе, не требует предварительного освобождения его от нефтепродуктов, зачистку, определение объема внутренних элементов конструкций и других затратных мероприятий, связанных с простоем, а значит - с упущенной коммерческой прибылью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ ОТКЛОНЕНИЯ НАРУЖНОГО КОНТУРА ДНИЩА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ГОРИЗОНТАЛИ | 2015 |
|
RU2590342C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИН ДЕФОРМАЦИЙ СТЕНКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО | 2015 |
|
RU2581722C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ КРЕНА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО | 2014 |
|
RU2597958C2 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2013 |
|
RU2521212C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ АВТОМОБИЛЬНОЙ ДОРОГИ И ХАРАКТЕРИСТИК ПРИДОРОЖНОЙ ПОЛОСЫ | 2016 |
|
RU2614082C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ РОВНОСТИ (КОЛЕЙНОСТИ) ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА АВТОМОБИЛЬНОЙ ДОРОГИ | 2016 |
|
RU2625091C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТИ ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА | 2012 |
|
RU2509978C1 |
| СПОСОБ ТРЁХМЕРНОГО (3D) КАРТОГРАФИРОВАНИЯ | 2014 |
|
RU2562368C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ВОССТАНОВЛЕНИЯ ПОЛОЖЕНИЯ ГОРИЗОНТАЛЬНОЙ ОСИ ЛИНЕЙНОГО ИНЖЕНЕРНОГО ОБЪЕКТА | 2015 |
|
RU2591585C1 |
Изобретение относится к области геодезического контроля резервуаров вертикальных цилиндрических стальных и может быть использовано при поверке стальных и железобетонных резервуаров вертикальных цилиндрических. Технический результат - повышение точности и достоверности определения величины отклонения образующих стенок резервуара вертикального цилиндрического от вертикали. Cпособ определения величины отклонения образующих стенок резервуара вертикального цилиндрического от вертикали геодезическим методом по внешней поверхности вышеупомянутого резервуара заключается в том, что производят сканирование внешней поверхности резервуара при помощи наземного лазерного сканера не менее чем с четырех сканерных станций на расстоянии от 15 до 25 м от резервуара. Определяют пространственные координаты по осям Χ, Υ, Ζ точек отражения лазерного луча от поверхности резервуара в условной системе координат. Выполняют регистрацию сканов между собой, производят обработку данных результатов. Формируют образующие боковой поверхности резервуара с любым интервалом путем сечения цифровой векторной трехмерной (3D) модели внешней боковой поверхности резервуара вертикальной плоскостью, а на самой образующей формируют точки с любым шагом. Получают цифровую векторную трехмерную (3D) модель образующей в местах сечения. Выполняют упомянутые действия по всем образующим. Передают полученную цифровую информацию в компьютерную программу, в этой же программе моделируют проектную цифровую трехмерную модель образующих стенок резервуара, используя их проектные значения. Совмещают ее с полученной фактической цифровой векторной трехмерной (3D) моделью образующих стенок резервуара. В автоматическом режиме определяют расхождения между фактическими и проектными значениями, получают величины отклонения образующих стенок вышеупомянутого резервуара от вертикали. 2 ил.
Способ определения величины отклонения образующих стенок резервуара вертикального цилиндрического от вертикали геодезическим методом по внешней поверхности вышеупомянутого резервуара, отличающийся тем, что производят сканирование внешней поверхности резервуара при помощи наземного лазерного сканера с линейной дискретностью шага сканирования в пределах от 0,5 до 4 см, не менее чем с четырех сканерных станций на расстоянии от 15 до 25 м от резервуара, определяют пространственные координаты по осям X, Y, Z точек отражения лазерного луча от поверхности резервуара в условной системе координат, выполняют регистрацию сканов между собой, производят обработку данных результатов наземного лазерного сканирования с помощью программного обеспечения, формируют образующие боковой поверхности резервуара с любым интервалом путем сечения цифровой векторной трехмерной (3D) модели внешней боковой поверхности резервуара вертикальной плоскостью, а на самой образующей формируют точки с любым шагом и получают цифровую векторную трехмерную (3D) модель образующей в местах сечения, выполняют упомянутые действия по всем образующим, передают полученную цифровую информацию в компьютерную программу, в этой же программе моделируют проектную цифровую трехмерную модель образующих стенок резервуара, используя их проектные значения, совмещают ее с полученной фактической цифровой векторной трехмерной (3D) моделью образующих стенок резервуара, в автоматическом режиме определяют расхождения между фактическими и проектными значениями, получают величины отклонения образующих стенок вышеупомянутого резервуара от вертикали.
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Методика поверки" | |||
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2010 |
|
RU2442112C1 |
| Сдвоенный двигатель для морских и речных судов | 1929 |
|
SU18103A1 |
| US 4676102 А1, 30.06.1987. | |||

