Изобретение относится к измерительной технике и может быть использовано для измерения линейной компоненты перемещения объекта при воздействии на него различных силовых факторов. Преимущественное применение изобретение может найти при испытании или мониторинге строительных конструкций.
Известен способ измерения линейного перемещения объекта с помощью прогибомера. Прогибомер содержит ролик известной длины окружности, вращающийся на оси, установленной в корпусе прибора. С объектом ролик соединяют через гибкую связь - натянутую проволоку, охватывающую ролик одним витком. Через многозвенную зубчатую передачу ролик соединен со стрелкой прибора и счетчиком числа ее оборотов. Величину перемещения (прогиба) определяют по разности показаний прибора [Аистов Н.Н. Испытание сооружений. Л. - М.: Госстройиздат, 1960, с.69…72]. Способ имеет ограниченные функциональные возможности из-за сложности монтажа проволоки, подверженности результатов измерений воздействиям на проволоку ветра и изменений температуры воздуха.
Этих недостатков не имеет известный способ определения расстояния (дальности) до объекта с помощью лазерного дальномера (прототип). Способ включает зондирование объекта путем посылки на него серии лазерных импульсов и определения в каждом i-м зондировании временного интервала ti между моментами излучения лазерного импульса и приема отраженного объектом излучения. Для каждого зондирования определяют отсчеты дальности Ri=c·ti/2, где с - скорость света [Патент РФ №2385471].
Дальность, таким образом, измеряется как длина отрезка линии визирования дальномера (лазерного луча) от точки установки дальномера до точки отражения излучения от объекта. Если известно, что объект за время между зондированиями будет перемещаться в направлении линии визирования, то такое перемещение можно, очевидно, определить как разность двух дальностей: П=Ri+1-Ri. Если же известно, что объект перемещается в каком-либо ином направлении, то определить величину такого перемещения значительно сложнее - для этого надо знать форму, размеры и начальное положение относительно линии визирования дальномера той поверхности, от которой отражается зондирующий импульс, и применять для вычислений достаточно сложные математические формулы. Этот недостаток делает известный способ практически неприменимым для измерения перемещений объекта, не совпадающих по направлению с линией визирования дальномера, что ограничивает функциональные возможности указанного способа.
Технический результат изобретения состоит в расширении функциональных возможностей способа: расширении диапазона применения и упрощении обработки результатов измерения при несовпадении линии визирования с направлением перемещения объекта.
Лазерный луч (линию визирования дальномера) направляют на объект так, как удобно по условиям проведения измерений - под произвольным углом к линии направления перемещения объекта. Луч направляют на жестко связанную с объектом плоскую поверхность, которую выбирают или размещают на объекте таким образом, что она пересекает линию визирования дальномера и линию направления перемещения объекта. Благодаря этому перемещение объекта приводит к изменению дальности до него, причем, поскольку поверхность плоская, изменение дальности прямо пропорционально величине перемещения. Коэффициент этой пропорциональности (тарировочный коэффициент) определяют, проводя тарировку дальномера, основанную на принципе независимости перемещений: перемещение дальномера приводит к такому же изменению дальности, что и перемещение самого объекта в том же направлении. Для тарировки включают дальномер в режим измерений, перемещают дальномер в направлении перемещения объекта на заранее известное расстояние, определяют разность дальностей до и после перемещения дальномера и вычисляют тарировочный коэффициент по формуле
К-А/П
где А - перемещение дальномера;
П - разность дальностей до и после перемещения дальномера.
После этого можно проводить измерения перемещений объекта, считывая дальности до него и умножая их разности на К.
Неплоскостность поверхности, от которой отражается луч лазера, а также возможные угловые перемещения объекта приводят к погрешности определения К. Для повышения точности измерений следует использовать минимально возможный участок этой поверхности при тарировке и измерениях. С этой целью измерения проводят непосредственно после перемещения дальномера на расстояние А, причем величину А выбирают возможно более близкой к ожидаемой величине перемещения объекта.
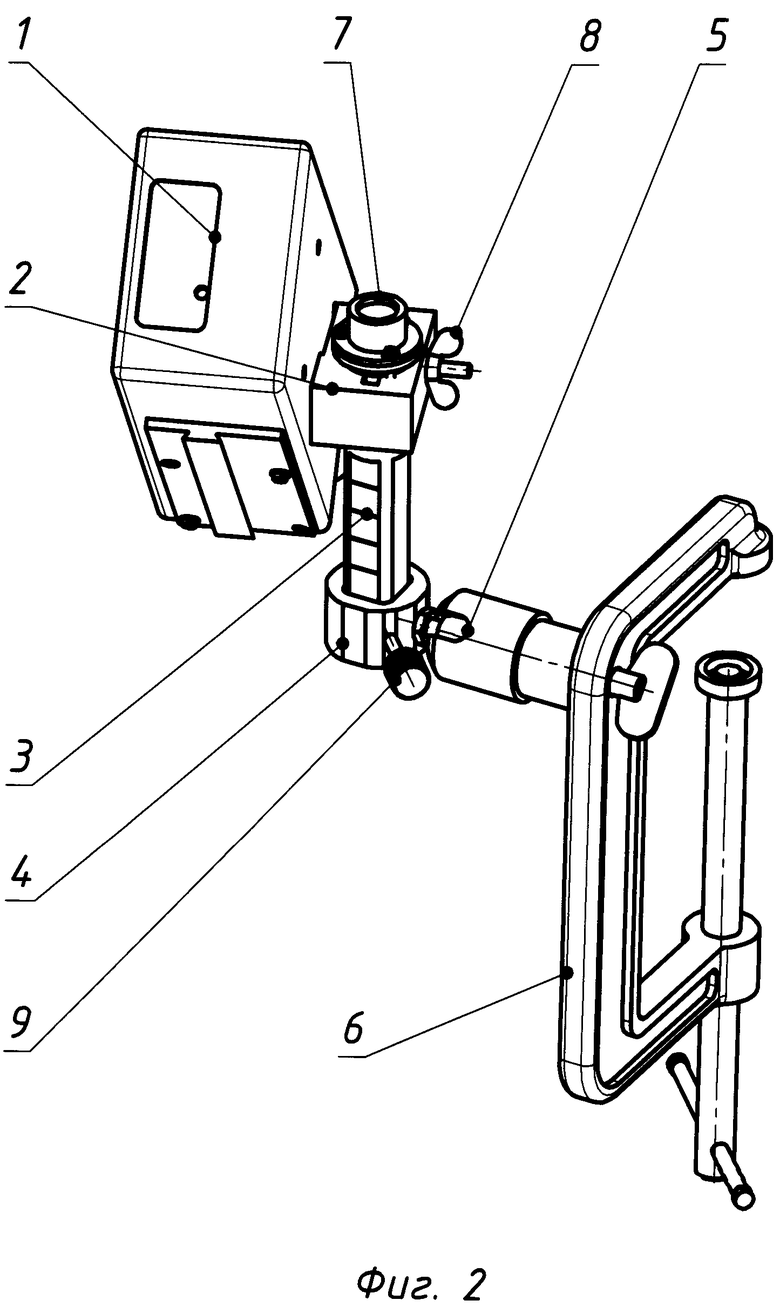
На фигуре 1 изображена схема проведения измерений прогиба моста. Ход луча лазера показан утолщенными линиями, начальное положения дальномера - пунктиром, конечное положение моста - штрихпунктирными линиями. На фигуре 2 показан пример установки дальномера на тарировочном приспособлении для измерения вертикальных перемещений (прогиба) объекта.
Реализация способа показана на примере измерения прогиба пролета моста, т.е. вертикального перемещения объекта 10. В качестве плоской поверхности выбран элемент пролета моста, образующий с вертикалью угол b. При начале работ лазерный луч дальномера 1 направляют на выбранную поверхность под некоторым углом а, и он отражается от нее в точке 1. Снимают отсчет дальности R1 и перемещают дальномер вниз на расстояние А, величина которого в данном примере выбрана несколько большей, чем ожидаемый прогиб моста. Луч перемещается по поверхности в точку 2 и дальность увеличивается до R2. Нагружаем мост, пролет прогибается на величину В=Н2-Н1. Луч лазера дальномера возвращается назад и останавливается в точке 3, дальность уменьшается до R3.
Так как на участке 1-2 поверхность плоская и угловое положение дальномера и объекта не изменилось, по теореме синусов получаем:
A/(R2-R1)=sin(a)/sin(b)=B/(R3-R2)=К, откуда В=K(R3-R2).
Перемещение дальномера в приведенном выше примере может быть осуществлено с помощью тарировочного устройства (фиг.2). Лазерный дальномер 1 крепится на клемме 2 с возможностью поворота в вертикальной плоскости. Клемма 2, в свою очередь, закреплена на штоке 3 с возможностью поворота вокруг оси штока. Шток 3 может перемещаться внутри хомута 4, в котором он базируется по своим цилиндрической и плоской поверхностям и фиксируется в нужном положении винтом 9. Шток 3 через шаровую головку 5 крепится к струбцине 6, которая служит для закрепления всего устройства на репере (неподвижных элементах строительных конструкций, штативе и т.п.). Пузырьковый уровень 7 крепится на клемме 2. Гайка 8 фиксирует от поворота клемму 2 и дальномер 1 в нужном положении.
Закрепив устройство на репере струбциной 6, устанавливают и фиксируют с помощью шаровой головки 5 шток 3 в вертикальном положении по показаниям уровня 7. Включают в режим непрерывных измерений дальномер 1, направляют его луч на поверхность объекта (моста) и фиксируют гайкой 8. Включают запись отсчетов дальности и, отпустив винт 9, перемещают шток 3 вместе с дальномером 1 вниз на нужную величину А. Снова затягивают винт 9 и контролируют неизменность показаний уровня 7: дальномер оттарирован и готов к измерению прогиба.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2015 |
|
RU2596774C1 |
| СИСТЕМА ПАССИВНОГО ДАЛЬНОМЕТРИРОВАНИЯ ОБЪЕКТОВ В УПРАВЛЯЕМЫХ БОЕПРИПАСАХ | 2004 |
|
RU2295103C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
| Способ бесконтактного определения расстояния между двумя точками | 2018 |
|
RU2711165C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1994 |
|
RU2082090C1 |
| СПОСОБ ДОСТАВКИ НА ТОЧЕЧНУЮ ЦЕЛЬ ИЗЛУЧЕНИЯ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2019 |
|
RU2724240C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2011 |
|
RU2486467C1 |
| Способ выявления и компенсации ошибки прицеливания ствольного оружия | 2022 |
|
RU2787320C1 |
| Способ защиты лазерных средств дальнометрирования от оптических помех с фиксированной задержкой по времени | 2018 |
|
RU2697868C1 |
| Устройство для прокладки маршрута адаптивного промышленного робота | 1980 |
|
SU882734A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения линейной компоненты перемещения объекта при воздействии на него различных силовых факторов. Техническим результатом является расширение диапазона применения и упрощение обработки результатов измерения при несовпадении линии визирования с направлением перемещения объекта. Способ измерения линейных перемещений объекта заключается в том, что лазерным дальномером проводят не менее двух измерений дальности до объекта. Линию визирования дальномера направляют на жестко связанную с объектом плоскую поверхность, которую выбирают или размещают на объекте таким образом, что она пересекает линию визирования дальномера и линию направления перемещения объекта, и тарируют дальномер, определяют разность дальностей до и после перемещения дальномера, вычисляют тарировочный коэффициент по формуле
К=А/П,
где А - перемещение дальномера;
П - разность дальностей до и после перемещения дальномера.
Измеряют перемещения объекта, величину которых определяют по формуле
B=K(R -R
-R ),
),
где R и R
и R соответственно предыдущая и последующая дальности до объекта. 1 з.п. ф-лы, 2 ил.
соответственно предыдущая и последующая дальности до объекта. 1 з.п. ф-лы, 2 ил.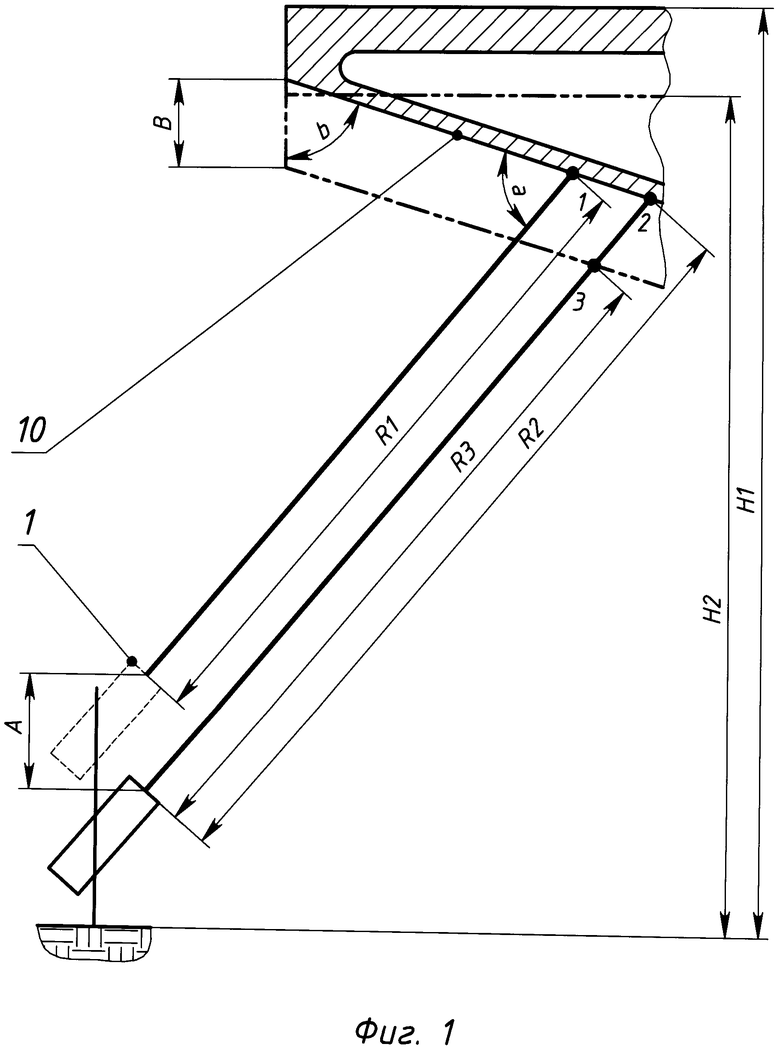
1. Способ измерения линейных перемещений объекта, состоящий в том, что лазерным дальномером проводят не менее двух измерений дальности до объекта, отличающийся тем, что линию визирования дальномера направляют на жестко связанную с объектом плоскую поверхность, которую выбирают или размещают на объекте таким образом, что она пересекает линию визирования дальномера и линию направления перемещения объекта, и тарируют дальномер, для чего включают дальномер в режим измерений дальности, перемещают дальномер в направлении перемещения объекта на заранее известное расстояние, определяют разность дальностей до и после перемещения дальномера, вычисляют тарировочный коэффициент по формуле
К=А/П,
где А - перемещение дальномера;
П - разность дальностей до и после перемещения дальномера,
после чего начинают измерения перемещения объекта, величину которых определяют по формуле
B=K(R-R),
где R и R соответственно предыдущая и последующая дальности до объекта.
2. Способ измерения линейных перемещений объекта по п.1, отличающийся тем, что величину А выбирают возможно более близкой к ожидаемой величине перемещения объекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И/ИЛИ СКОРОСТИ УДАЛЕННОГО ОБЪЕКТА | 2008 |
|
RU2385471C2 |
| RU 98116919 А, 27.06.2000 | |||
| US 20120133917 А1, 31.05.2012 | |||
| WO 1981002628 А1, 17.09.1981 | |||

