Изобретение относится к сфере инженерной геодезии при строительстве, проведении геодезических работ на малых объектах, при проведении архитектурных работ по обмеру объектов с целью их реконструкции и реставрации, при прокладке коммуникаций на высокорасположенных объектах, изобретение может найти широкое распространение и в быту, на приусадебных и дачных участках.
В настоящее время имеется большой арсенал дистанционного определения расстояния от точки наблюдения (визирования) до заданного объекта. Как правило, это осуществляется различными типами дальномеров с активным и пассивным способом измерения. Обычно сейчас для проведения топографических работ в инженерной геодезии в основном используются дальномеры активного типа и чаще всего лазерные. Многообразие лазерных дальномеров различного назначения очень велико и их характеристики в значительной мере определяются их областью применения. Так в области инженерной геодезии используются лазерные линейки с диапазоном максимальной дальности замера от 20 до 1000 метров. При большой дальности измерения для визирования при наведении на необходимую точку такие дальномеры иногда снабжаются широкоугольным окуляром либо камерой с выходом на собственный дисплей с увеличение от 3 до 8 раз. Наибольшую дальностью и увеличение до 20 раз имеют лазерные целеуказатели-дальномеры в военном деле. Наоборот дальномеры (лазерные линейки, рулетки) для внутренних работ обычно ограничены в своем применении 20-60 метрами, но они снабжаются многочисленными дополнительными функциями, как то, определение площадей, высоты, расстояния между точками, если для таких вычислений можно применить теорему Пифагора. Такими возможностями обладают многие лазерные линейки, за исключением входящих в самую дешевую категорию. Для внешних работ в инженерной геодезии применяются лазерные линейки со значительно  диапазоном измерения вплоть до 1000 метров. В ряде достаточно дорогих профессиональных дальномеров типа Leica Disto D510 или высококачественных отечественных дальномеров Condtrol Х2 Plus, ХР4 Pro оснащены датчиками наклона, который существенно увеличивает дополнительные возможности по решению задач, стоящих в инженерной геодезии. Такими же возможностями обладают и лазерные дальномеры, линейки ряда ведущих фирм, таких как Bosch, Tesla, Makita, Carl Zeiss Victory и ряд других.
диапазоном измерения вплоть до 1000 метров. В ряде достаточно дорогих профессиональных дальномеров типа Leica Disto D510 или высококачественных отечественных дальномеров Condtrol Х2 Plus, ХР4 Pro оснащены датчиками наклона, который существенно увеличивает дополнительные возможности по решению задач, стоящих в инженерной геодезии. Такими же возможностями обладают и лазерные дальномеры, линейки ряда ведущих фирм, таких как Bosch, Tesla, Makita, Carl Zeiss Victory и ряд других.
Но, несмотря на наличие в современных лазерных дальномерах, рулетках, линейках, применяемых в инженерной геодезии, с различными дополнительными функциями, в них нет функции, позволяющей найти расстояние между двумя точками объекта произвольно расположенных в пространстве без контакта измерителя с одной из точек, между которыми необходимо определить расстояние. А необходимость в таких замерах возникает постоянно. Применение современных инструментов в таких случаях требует сооружение дополнительных конструкций, что бы добраться до одной из измеряемых точек и приложить к ней ручной дальномер либо проводить измерение из разных точек и в дальнейшем применять дополнительные расчетные методы. Можно так же применить методы фотограмметрии или провести замер с помощью теодолитов или тахеометров, что по стоимости будет на порядки дороже. Различные варианты обмеров в подобных случаях подробно описаны в учебнике по инженерной геодезии. Д.А. Кулешов, Г.Е. Стрельников «Инженерная геодезия для строителей».
Иногда для измерения таких расстояний, когда невозможен контакт ни с одной из точек, между которыми необходимо определить расстояние, применяют нахождение координат всех точек объекта в декартовой или сферической системе координат и затем переходят к определению их взаиморасположения. Так в патенте RU 97517 U1, принятому за прототип настоящему изобретению, приведена блок схема для снятия характеристик рабочего места, в частности, в кабине летательного аппарата, когда с помощью сферического шарнира, закрепленного на штативе, регистрируются расстояния, величины углов объекта в азимутальной и угломестной плоскостях, в центре которых находится дальномер. Иными словами расположение всех объектов ведется в сферической стстеме координат. Однако, определяя с большой точностью положения каждой точки обследуемого пространства, ИДУ-01, так названо устройство авторами, не предполагает определение расстояния между двумя точками в процессе измерений. Эти величины вычисляются потом при компьютерной обработке всех измеренных данных, которые поступают в расчетный блок непосредственно с цифровых датчиков в процессе обследования. В патенте РУ 2173445 разработан метод бесконтактного определения пространственных координат точек объекта с помощью фотограмметрии. Однако способ достаточно сложный в реализации даже при современных методах обработки фотоснимков объекта, сделанных с разных точек съемки, тем более без координатных меток на снимках, что предполагается при применении способа автором.
Вместе с тем из геометрии известно, что если в треугольнике даны две стороны и угол между ними, то определить третью сторону, в нашем случае расстояние между заданными точками не представляет труда.
На фиг. показано устройство, которое позволяет реализовать предлагаемый способ нахождения расстояния между двумя точками без контактным способом с измерением из одной точки и использованием на конечном этапе путем вычисления по упомянутой выше формуле, нахождения третьей стороны по замеренным двум другим и углу между ними. Устройство для реализации способа состоит из штатива 1 с шарнирной головкой, цифрового угломера 9, лазерного дальномера (рулетки) 8, двойной скобы (петли) 11, нижняя часть которой скоба 2 с помощью винтов крепится к платформе шарнира штатива 1. Двойная скоба 11 имеет продольную ось 5, вокруг которой вращается верхняя скоба 4 относительно нижней 2, с возможностью фиксации рукояткой 3 положения верхней скобы 4. К верхней плоской поверхности скобы 4 крепится нижняя линейка 6 угломера 9. На второй верхней линейке 7 угломера 9 жестко закреплен лазерный дальномер 8, лазерный луч которого строго параллелен продольной оси 5 двойной скобы 11.
Применение способа происходит в следующей последовательности. Выбрав удобную точку, откуда хорошо видны обе точки, между которыми нужно определить расстояние даже, если между ними имеется препятствие, в этой точке устанавливается штатив, выставлять его по уровню не обязательно. Затем к платформе шарнира штатива крепится двойная скоба 11 вместе с угломером и установленным на нем лазерным дальномером (рулеткой) 8. Крепление осуществляется за нижнею скобу 2. Установив угломер 9 в нулевое положение, с помощью сферического шарнира штатива выставляется прибор так, чтобы луч лазера попадал на первую заданную точку при этом снимается показание дальномера расстояние до первой точки.. Сферический шарнир фиксируется в этом положении, имеющейся на штативе рукояткой 10. При этом две точки плоскости, в которой должно происходить визирование, становятся закрепленными, благодаря фиксации оси 5, которая теперь лежит в этой плоскости, поскольку эта ось практически совпадает с линией визирования на первую точку. С табло лазерного дальномера (рулетки) снимается показание - расстояние а от точки визирования до первой точки. Теперь остается две степени свобод, что бы совместить луч лазера со второй точкой. Поворачивая весь угломер вокруг продольной оси скобы 5 и, изменяя собственный угол второй линейки угломера, на которой закреплен лазерный дальномер 8, добиваемся, что бы луч лазера попал на вторую точку. При этом, затянув стопорный винт 3, фиксируем все измерители и положение плоскости измерения относительно оси 5.
Затем снимаем показания о расстоянии b от точки визирования до второй точки, а с табло угломера снимаем показание величины угла между двумя визированиями α. Далее находим третью сторону при известных двух а и b и угле между ними α по формуле:
L=(а2+b2-2*a*b*cos α)1/2,
где L - расстояние между заданными точками. Вводим данные полученных измерений в калькулятор и получаем расстояние между этими точками
Для облегчения прицеливания лазера на конкретную точку вместе с лазерным дальномером (рулеткой) целесообразно применять и оптический визир, (прицел, видоискатель). У некоторых дальномеров подобные устройства есть и встроенные. При промышленном изготовление прибора устройство ввод данных в калькулятор и вычисление полученного расстояния между точками должно происходить автоматически. Способ применим и в случае использования двух дальномеров на нижней и верхней линейках угломера. При этом за счет размещения лазера на нижней линейке впереди оси 5 двойной скобы можно точно совместить ось вращения и луч лазера, как ее продолжение Возможно, с той же целью ось двойной скобы выполнить в виде корпуса дальномера, тогда это совмещение будет наиболее точным. Неизменным остается только принцип применения фиксируемой оси вращения от точки визирования до первой точки, совпадающей с осью луча лазера, направленного на туже точку. В противном случае провести нацеливание сразу двух лучей на две точки будет чрезвычайно сложно.
В обоих последних случаях применение способа с использованием двойной скобы и шаровой опоры штатива остаются предпочтительными. При определенных доработках возможно совмещение дальномера с буссолью и шаровой головкой штатива, хотя позже это вызовет затруднение с автоматизацией способа. Наиболее точный вариант применения способа мог бы быть с использованием тахеометра, однако, существующие подставки с тремя регулировочными винтами можно применить лишь для малых превышений одной точки над другой, да и по техническим условиям вертикальная ось тахеометра должна выставляться с большой точностью и при работе не допустим ее перекоса..
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
| Способ высокоточного определения параметров поверхности и осей вращающихся агрегатов | 2016 |
|
RU2650418C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧКИ ПАДЕНИЯ МАКЕТА БОЕПРИПАСА ЛАЗЕРНЫМ ИЗМЕРИТЕЛЬНЫМ УСТРОЙСТВОМ | 2019 |
|
RU2708705C1 |
| Оптико-электронный тахеометр | 2021 |
|
RU2782509C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫДЕЛА ЛЕСА ДЛЯ ЭЛЕКТРОННОЙ ТЕМАТИЧЕСКОЙ ЛЕСНОЙ КАРТЫ | 2007 |
|
RU2378823C2 |
| СПОСОБ ИЗМЕРЕНИЯ УЧЕТНОГО ДЕРЕВА | 2002 |
|
RU2224418C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧКИ ПАДЕНИЯ МАКЕТА БОЕПРИПАСА | 2019 |
|
RU2707976C1 |
| Способ дистанционного геометрического нивелирования | 2015 |
|
RU2610049C2 |
| Комплекс для определения пространственных координат удаленного объекта, расположенного на местности | 2020 |
|
RU2744427C1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |

Способ бесконтактного определения расстояния между двумя точками относится к сфере строительства, архитектуры, геодезических работ на небольших участках, а также при бытовых домашних и хозяйственных работах. Способ основан на совмещении с помощью шаровой головки штатива и специальной двойной скобы плоскости работы угломера и дальномера с плоскостью, в которой лежат точка визирования и обе заданные точки. Измерив в этой плоскости расстояние до обеих точек дальномером и измерив в той же плоскости угол между обеими линиями визирования, можно вычислить расстояние между заданными точками по формуле:
L=(а2+b2-2*a*b*cos α)1/2,
где L - расстояние между заданными точками, а - расстояние от точки визирования до первой точки, b - расстояние от точки визирования до второй точки, α - угол между линиями визирования на первую и вторую точку. Технический результат – упрощение определения расстояния между двумя точками. 1 ил.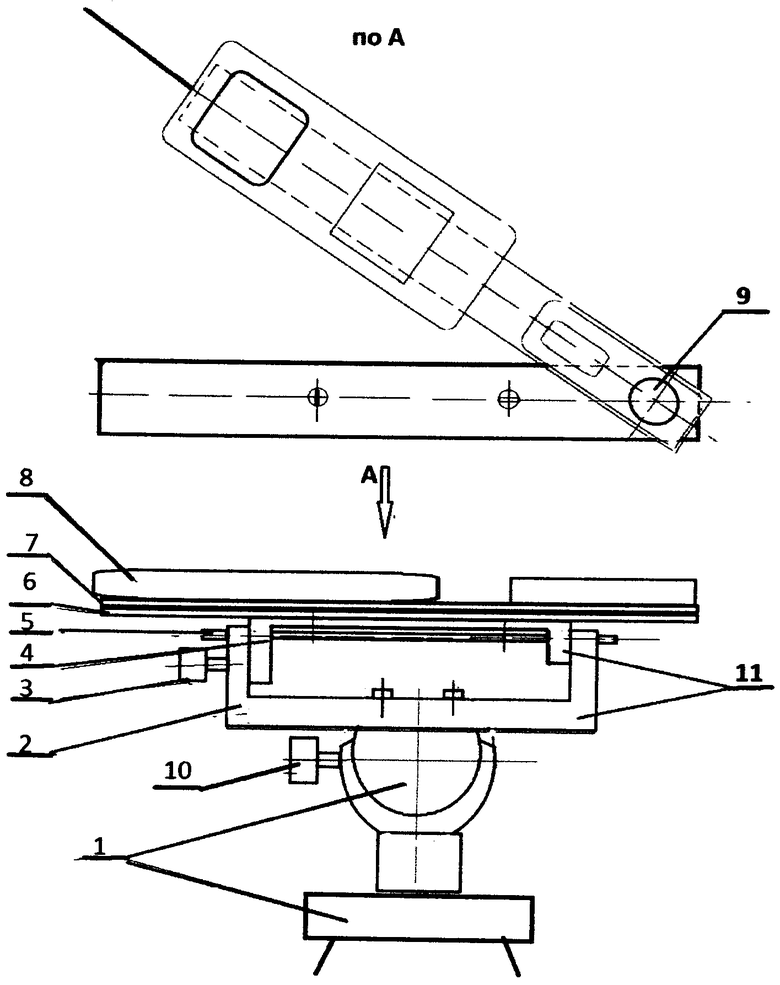
Способ бесконтактного определения расстояния между двумя точками, основанный на расположении рабочей плоскости угломера и жестко с ним связанного дальномера в точке визирования (наблюдения) таким образом, чтобы эта плоскость совпадала с плоскостью, проходящей через эту точку и заданные две точки, между которыми нужно определить расстояние, для чего сначала производится фиксация оси визирования (луча визирования) от точки визирования (наблюдения) до одной из заданных точек, далее путем поворота плоскости угломера вращением относительно этой оси и поворотом дальномера, лазерный луч которого лежит в плоскости угломера и зафиксированной в пространстве оси, визируют луч лазера на вторую точку, что выполняется с использованием двойной скобы с продольной осью вращения, на верхней скобе которой жестко закреплен угломер с дальномером, а нижняя скоба жестко связана с шаровой опорой штатива, с помощью которой выставляется и механически фиксируется положение продольной оси и вместе с ней линии луча лазера от точки визирования к первой заданной точке, затем поворотом угломера относительно этой оси и поворотом в плоскости угломера луч лазера направляется на вторую точку, найденные значения расстояний до каждой из точек и угол между линиями визирования, измеренный угломером, позволяют вычислить расстояние между заданными точками по формуле
L=(а2+b2-2*a*b*cos α)1/2,
где L - расстояние между заданными точками, а - расстояния от точки визирования до первой точки, b - расстояние от точки визирования до второй точки, α - угол между линиями визирования на первую и вторую точку.
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2004 |
|
RU2269093C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| US 20150090244 A1, 02.04.2015. | |||

