Изобретение относится к области радиотехники, а именно к устройствам наведения, ориентирования и навигации движущихся объектов, предназначенных для управления траекторией перемещения объекта, движущегося к заданной точке пространства, и может быть использовано в военной технике, в том числе и для наведения самодвижущихся управляемых боеприпасов на бронированные цели по их собственному тепловому излучению (по отраженному от цели лазерному лучу).
В настоящее время в большинстве систем наведения управляемых боеприпасов объект поражения представляется как «точечная цель». Современные системы наведения ориентированы на наведение боеприпаса в контур цели [1]. Практика показывает, что при подлете боеприпаса к объекту поражения (при уменьшении расстояния между ними) это расстояние соизмеримо с размерами объекта поражения (цели). В этом случае цель надо полагать «протяженной» как по направлению, так и по дальности.
Для повышения точности наведения в перспективных управляемых боеприпасах целесообразно применение устройств измерения дальности. Измерение дальности между управляемым боеприпасом и объектом поражения может быть использовано для селекции цели, выбора времени начала маневра не только по направлению, но и по дальности.
Измерение дальности осуществляется активными и пассивными устройствами.
В основу применения активных устройств измерения дальности положен оптический (квантовый) дальномер. Использование активных устройств измерения дальности в управляемых боеприпасах имеет следующие недостатки:
- увеличиваются массогабаритные характеристики системы управления, так как в боеприпасе должны находиться источник и приемник излучения подсветки, то есть снижается масса взрывчатого вещества;
- повышается вероятность обнаружения подлетающего к объекту поражения боеприпаса, так как на нем размещен источник излучения.
Зрение двумя глазами (стереоскопическое зрение) позволяет человеку измерять расстояние пассивным способом на основе стереоскопического базового метода. Этот же способ положен в основу работы оптических дальномеров, например, состоящих на вооружении в качестве дублирующих (выносных и др.) артиллерийских стереоскопических дальномеров ДСП-30, ДС-0,9, ДС-1, ДС-2 и зенитных дальномеров типа ЗДН и др. База приборов значительно увеличена по сравнению с базой глаз и составляет, например, один метр для ДС-1.
Сущность измерения расстояния с помощью оптических дальномеров лежит в решении измерительного треугольника Δ 123 (фиг.1). На фиг.1 приведен стереоскопический базовый метод измерения дальности. Дальность D до объекта 1 определяется по величине параллактического угла γ и по величине базы прибора Б, определяемой положением приемных зеркал 2 и 3
В приборе угол γ определяется исходя из величины линейного параллакса Р, измеренного по прибору как
где f - фокусное расстояние объективов прибора.
Значения Б и f являются постоянными величинами для прибора. Поэтому достаточно измерить Р, чтобы вычислить дальность до объекта D.
Данный способ пассивен, то есть не демаскирует процесс измерения, однако данный метод требует значительной базы, что не позволяет его реализовать в обычном виде в малогабаритных управляемых боеприпасах. Кроме того, большая длительность процесса измерения дальности и участие в нем оператора-человека полностью исключает автоматизацию данного процесса.
Для пространственной селекции целей в существующих управляемых боеприпасах применяется при сканировании поля зрения один или несколько приемных датчиков. В перспективных головках самонаведения используются мозаичные датчики, в том числе и на приборах с зарядовой связью - ПЗС. Матрицы ПЗС используются в системах разведки и в управляемых боеприпасах армии США, разработанных на основе "Системы общих модулей" (Commen Modules-CM).
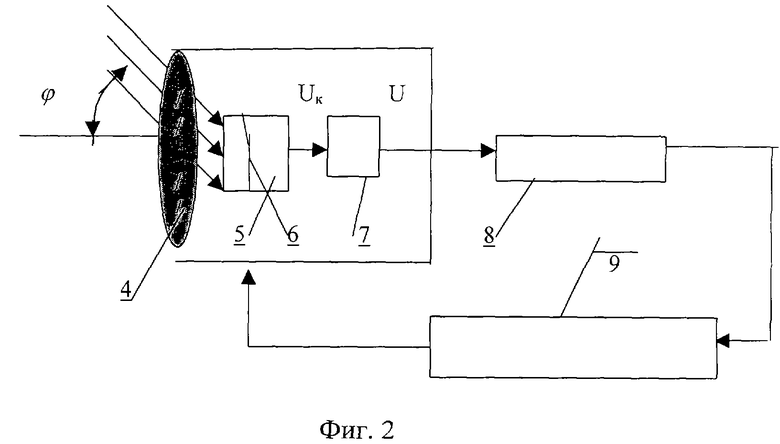
На фиг.2 приведена структурная схема современного управляемого боеприпаса. На фиг.2 обозначено: 4 - объектив; 5 - приемное устройство; 6 - линейный фотоприемник; 7 - электронный блок; 8 - исполнительное устройство (рули); 9 - управляемый боеприпас (ракета).
Использование ПЗС позволит решать задачи пространственной и временной селекции. Плоская матрица способна регистрировать перемещение объекта в двух плоскостях - «вправо-влево» и «вверх-вниз». Однако использование плоских линеек и матриц фотоприемников, плоскость которых перпендикулярна линии визирования снаряд-цель, не позволит измерить дальность до объекта поражения - «цели».
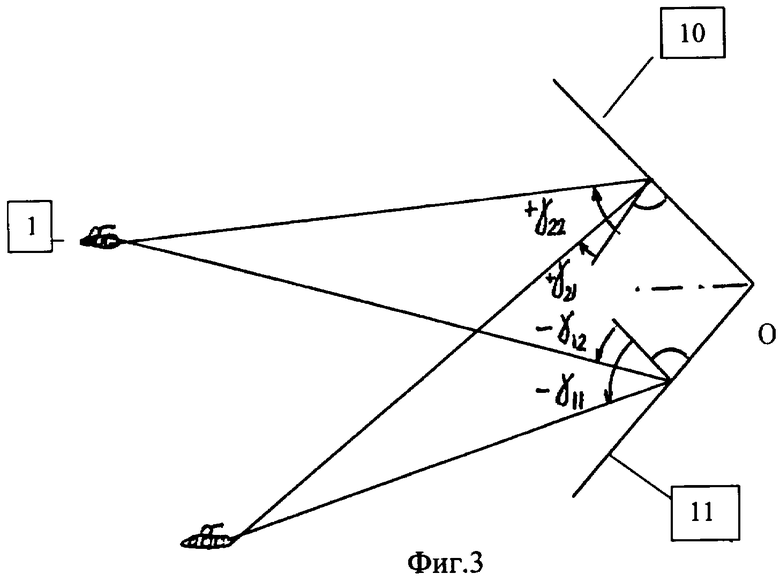
В основу предлагаемого устройства пассивного дальнометрирования объектов в управляемых боеприпасах положен тот же способ решения измерительного треугольника Δ 123 (фиг.1), однако роль разнесенных на базу Б глаз человека или зеркал 2 и 3 оптического дальномера выполняют две линейки или два мозаичных приемника 10 и 11 на основе приборов с зарядовой связью (ПЗС), приемные площадки которых наклонены под углом 90° к линии визирования снаряд-цель (фиг.3). В качестве источника излучения от объекта 1 может быть использовано тепловое (инфракрасное) излучение, при этом должны использоваться ПЗС, работающие в инфракрасной области спектра.
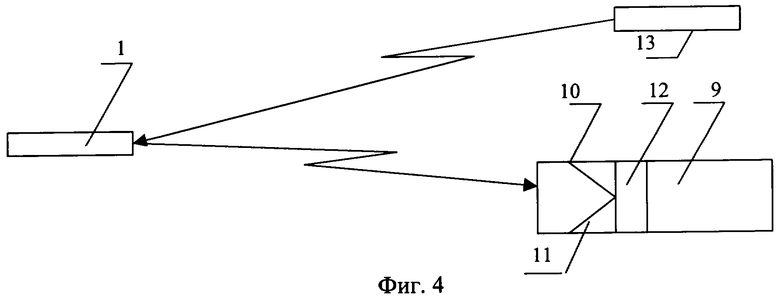
При полуактивном способе измерения дальности до объекта приемники ПЗС, работающие в диапазоне лазера подсветки, фиксируют отраженное от объекта лазерное излучение (фиг.4). На фиг.4 обозначено: 1 - объект поражения (цель); 9 - управляемый боеприпас (ракета); 10 и 11 - фотоприемники на основе ПЗС, наклоненные под углом 90° к линии визирования «фотоприемник-объект»; 12 - фотоприемное устройство; 13 - излучатель полуактивной лазерной подсветки.
Фотоприемное устройство 12 (фиг.4), в отличие от фотоприемного устройства 5 (фиг.2), обрабатывает сигнал не от одного линейного фотоприемника 6, а от двух матриц 10 и 11 (фиг.3 и 4), что позволяет осуществить измерение дальности до объекта поражения пассивным способом на основе стереоскопического базового метода. Это дает возможность при наведении управляемого боеприпаса, дополнительно к существующему методу пространственной селекции цели, определять закон распределения угла встречи боеприпаса с преградой, а исходя из этого, выбирать время задержки срабатывания взрывателя для повышения эффективности действия кумулятивной струи или выбирать время начала маневра (например, маневр типа «горка») для поражения цели в наиболее уязвимое место (например, сверху).
Дальнометрирование с использованием двух мозаик когерентных фотодетекторов позволит также использовать сформированные голограммы, восстанавливающие трехмерное изображение объектов, а затем сравнивать с эталоном, что приведет к снижению влияние помех, вплоть до последней коррекции перед "мертвой зоной" полета управляемого боеприпаса. Трехмерный облик бронированной цели позволит повысить вероятность наведения на него управляемого боеприпаса.
Целью изобретения является измерение дальности пассивным или полуактивным способом для совершения маневра самодвижущимся управляемым боеприпасом при наведении в уязвимые места для повышения эффективности поражения бронированного объекта.
Эта цель достигается тем, что для измерения дальности пассивным или полуактивным способом на основе стереоскопического базового метода используется фотоприемное устройство в виде двух матриц приборов зарядовой связи, наклоненных под углом 90° к линии визирования «фотоприемник-объект», и размещенное на управляемом боеприпасе.
Литература
1. Пархоменко В.А., Устинов Е.М. Способ поражения управляемыми боеприпасами бронированных объектов в местах размещения оптико-электронных приборов. - Федеральный институт промышленной собственности: Решение о выдаче патента на изобретение. Заявка №2003130383/02(032612), МПК 7 F 41 G 7/00 от 14.10.2003 г.
2. Пархоменко В.А. и др. Пассивное дальнометрирование в управляемых боеприпасах при поражении оптико-электронных приборов бронированных объектов. Сборник тезисов докладов 31 НТК. - Пенза: АИИ. 2001.
3. Проектирование оптико-электронных приборов: Учебник. Изд.2-е, перераб. и доп. / Ю.Б.Парвулюсов и др.; Под ред Ю.Г.Якушенкова. - М.: Логос, 2000. - 488 с.
4. Патент 323 925. GO 1 S 1/70. Бюллетень №1 за 1972 г.
5. Заявка №2367291 от 5.10.1976. Франция. МКИ G 01 S 9/62, F 42 В 15/02. Устройство угловой локации световых объектов и система автоматического наведения, включающая такое устройство. - Опубл. в РЖ Радиотехника. Свод. том 8, 1979. 8Е350П.
6. Авт. свидетельство SU 1172374 A1 от 26.03.84. Оптическая система наведения подвижного объекта. МКИ G 01 S 3/78.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАШЛЕМНАЯ РАЗВЕДЫВАТЕЛЬНАЯ СИСТЕМА ПАССИВНОГО ДАЛЬНОМЕТРИРОВАНИЯ ОБЪЕКТОВ | 2007 |
|
RU2349864C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА ПО ОТРАЖЕННОМУ ОТ ОБЪЕКТА ПОРАЖЕНИЯ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2005 |
|
RU2293942C2 |
| ПРИЦЕЛ НА ВНУТРЕННЕЙ БАЗЕ | 2016 |
|
RU2638625C2 |
| ТРЁХКООРДИНАТНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ МОНОКУЛЯРНЫМИ ОПТИКО-ЭЛЕКТРОННЫМИ ПРИБОРАМИ НАЗЕМНЫХ И ВОЗДУШНЫХ РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСОВ НА ОСНОВЕ СТЕРЕОСКОПИЧЕСКОГО 3D-МОНИТОРИНГА | 2021 |
|
RU2789117C2 |
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2013 |
|
RU2573709C2 |
| ПРИБОР НАБЛЮДЕНИЯ-ПРИЦЕЛ СО ВСТРОЕННЫМ ПАССИВНЫМ ДАЛЬНОМЕРОМ | 2021 |
|
RU2785957C2 |
| УСТРОЙСТВО ЛУЧЕВОГО НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 2003 |
|
RU2267733C2 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2123165C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2122699C1 |
Изобретение относится к способам наведения самодвижущихся управляемых боеприпасов по отраженному лазерному лучу и может быть использовано в военной технике. Сущность изобретения заключается в том, что на управляемом снаряде размещают излучатель полуактивной лазерной подсветки и фотоприемное устройство. Для измерения дальности на основе стереоскопического базового метода при наведении управляемых боеприпасов с полуактивной системой наведения на объекты используют две матрицы приборов зарядовой связи приемника системы наведения, которые наклонены под углом 90° к линии визирования "фотоприемник-объект". Реализация изобретения позволяет повысить точность наведения самодвижущегося управляемого боеприпаса и эффективность поражения объекта. 4 ил.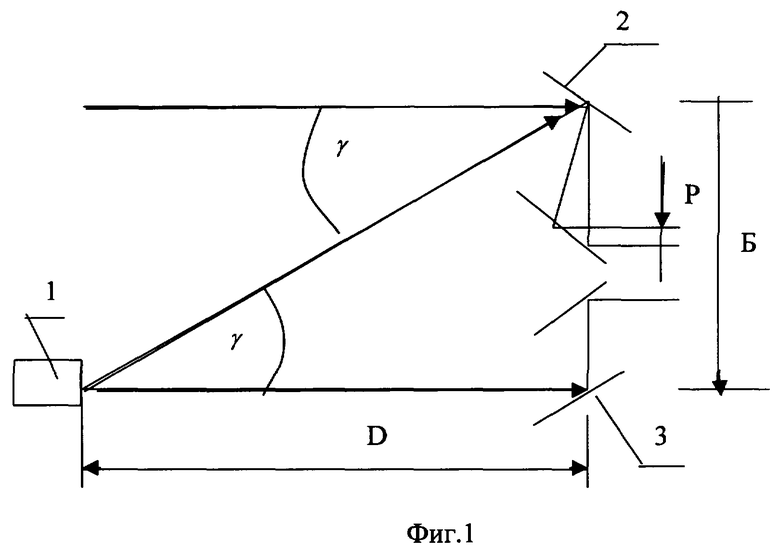
Система пассивного дальнометрирования объектов, содержащая фотоприемное устройство, размещенное на управляемом боеприпасе, отличающаяся тем, что для измерения дальности до объекта на основе стереоскопического базового метода при наведении управляемого боеприпаса она включает две матрицы фотоприемников на основе приборов зарядовой связи, наклоненные под углом 90° к линии визирования "фотоприемник - объект".
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ СНАРЯДА ПО ОТРАЖЕННОМУ ОТ ЦЕЛИ ЧАСТОТНОМУ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2003 |
|
RU2231735C1 |
| СПОСОБ УПРАВЛЕНИЯ СНАРЯДОМ | 1992 |
|
RU2021577C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОНАВОДЯЩИМСЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ | 2001 |
|
RU2210717C2 |
| US 4589610 A, 20.05.1986 | |||
| СПОСОБ КОРРЕКЦИИ ЭНДОТЕЛИАЛЬНОЙ ДИСФУНКЦИИ КОМБИНАЦИЕЙ РОЗУВАСТАТИНА И ТИОКТОВОЙ КИСЛОТЫ ПРИ ГИПОЭСТРОГЕН-L-NAME-ИНДУЦИРОВАННОМ ДЕФИЦИТЕ ОКСИДА АЗОТА | 2014 |
|
RU2568365C1 |
| DE 3338191 A1, 04.02.1988. | |||

