Настоящее изобретение находит применение в системах магнитно-резонансной визуализации (MRI), в частности, в отношении MRI с подавлением сигнала от жира и количественного определения жира с помощью MRI. Однако следует понимать, что описанные методы могут также найти применение в других визуализирующих системах, других сценариях магнитного резонанса, других методах сбора данных изображений и т.п.
При измерении «эхосигнала» в области исследования МР (магнитно-резонансного) сканера, параллельно ее продольной оси, формируется поле B1, которое вынуждает клеточные ядра в области исследования немедленно ориентироваться относительно поля B1. Ядра разных материалов (например, жира и воды) резонируют или «поворачиваются» обратно в их первоначальные положения с разными скоростями вращения. Эхосигнал вызывается и регистрируется МР сканером, например, посредством обращения поля B1. Ядра разных материалов находятся в разных положениях во время их соответствующих поворотов в момент, когда формируется эхосигнал (например, «время эха») из-за их разных скоростей вращения, и, следовательно, допускают их различение в процессе реконструкции изображения. Другие методы используют, например, сбор данных с импульсными последовательностями (ИП) градиентного эха вместо описанной ИП последовательности спинового эха.
Подавление сигнала от липидов является общим требованием многочисленных применений MRI. Кроме того, в последнее время возрастает заинтересованность в одновременной количественной оценке сигналов от воды и жира, например, в контексте заболеваний, связанных с ожирением и нарушениями обмена веществ. Одним из подходов для удовлетворения обоих требований является визуализация методом Диксона, который основан на разнице химических сдвигов протонов воды и липидов и вытекающих сдвигов по фазе между сигналами от них при разных временах эха, что допускает ретроспективное разделение во время реконструкции изображения.
В частности, при быстрой визуализации визуализация методом Диксона обычно выполняется только с двумя разными временами, чтобы обеспечить как можно меньшие периоды времени сканирования. Существующие двухточечные способы Диксона налагают ограничения на фазовый угол вода-жир при разных временах эха, используемых для сбора данных. Упомянутые ограничения приводят к уменьшению гибкости при разработке последовательностей и, следовательно, часто приводят к увеличению периодов времени сканирования.
Например, одно или оба времени эха имеют фиксированную фазу, что приводит к увеличению периодов времени сканирования. То есть при визуализации обычными методами Диксона используют, самое большее, только одно время эха с переменной или произвольной фазой, тогда как требуется одно время эха с фиксированной фазой.
Настоящая заявка предлагает новые и усовершенствованные системы и способы для различения материалов (например, жира и воды), имеющих разные резонансные характеристики, с использованием усовершенствованного метода Диксона для MRI, который устраняет вышеупомянутые и другие проблемы.
В соответствии с одним аспектом, способ определения отличий между водой и жировой тканью в данных MRI содержит этап измерения первого сигнала (I1) и второго сигнала (I2) с разными произвольными временами эха во время магнитно-резонансного (МР) сканирования и этап вычисления первой и второй составляющих из первого и второго сигналов. Способ дополнительно содержит этап получения двух возможных вариантов дифференциальной фазовой погрешности из первой и второй составляющих и этап выбора для каждого пикселя одного из полученных возможных вариантов дифференциальной фазовой погрешности на основании допущения о гладкости возмущающей неоднородности поля. Кроме того, способ содержит этап реконструкции изображения воды и изображения жира с использованием выбранного возможного варианта дифференциальной фазовой погрешности.
В соответствии с другим аспектом, система, которая использует модифицированный метод Диксона для различения между водой и жировой тканью в данных MRI (магнитно-резонансной визуализации), содержит процессор, запрограммированный с возможностью измерения первого сигнала (I1) и второго сигнала (I2) с разными произвольными временами эха во время магнитно-резонансного (МР) сканирования объекта исследования и вычисления первой и второй составляющих из первого и второго сигналов. Процессор дополнительно запрограммирован с возможностью получения двух возможных вариантов дифференциальной фазовой погрешности из первой и второй составляющих и выбора для каждого пикселя одного возможного варианта дифференциальной фазовой погрешности на основании допущения о гладкости возмущающей неоднородности поля. Система дополнительно содержит реконструирующий процессор, который реконструирует изображение воды и изображение жира, с использованием выбранного возможного варианта дифференциальной фазовой погрешности, и память, которая хранит реконструированные изображения.
Одно из преимуществ состоит в том, что сокращается время сканирования.
Другое преимущество состоит в том, что повышается качество изображения.
Дополнительное преимущество состоит в том, что повышается гибкость выбора параметров протокола.
Другие дополнительные преимущества настоящего изобретения станут очевидными специалистам со средним уровнем компетентности в данной области техники после прочтения и изучения нижеследующего подробного описания.
Чертежи предназначены только для иллюстрации различных аспектов и не подлежат истолкованию в ограничительном смысле.
Фигура 1 - схема системы, которая способствует смягчению ограничительных условий, налагаемых на времена эха, используемые при исполнении двухточечного метода Диксона во время МР сканирования, для повышения эффективности сканирования и повышения пространственно-временного разрешения и расширения зоны покрытия, в соответствии, по меньшей мере, с одним аспектом, описанным в настоящей заявке.
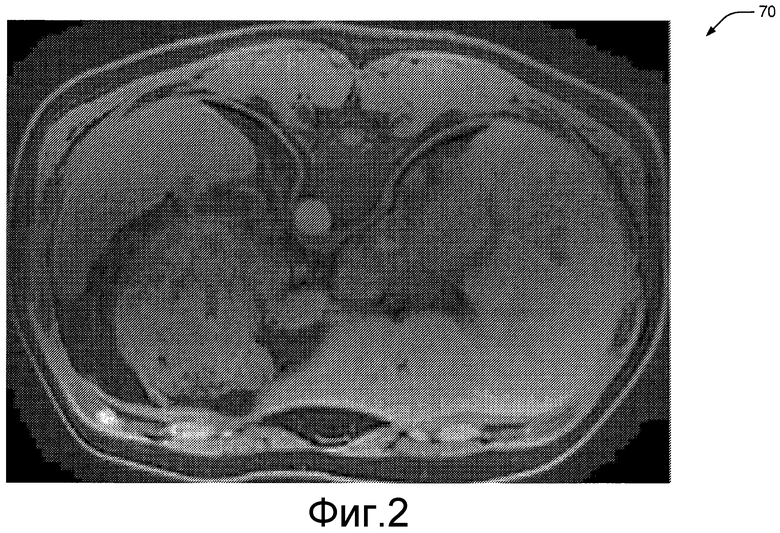
Фигура 2 - пример изображения воды (со слабым контрастом), вычисленного с использованием систем и способов, описанных в настоящей заявке, по данным, собранным с последовательностью с двумя эхо, при 3T, с временами эха 1,14 мс и 2,13 мс, соответствующими фазовым углам (Θ) вода-жир 179° и 333°.
Фигура 3 - пример изображения жира (со слабым контрастом), вычисленного с использованием систем и способов, описанных в настоящей заявке, по данным, собранным с последовательностью с двумя эхо, при 3T, с временами эха 1,14 мс и 2,13 мс, соответствующими фазовым углам (Θ) вода-жир 179° и 333°.
Фигура 4 - схема способа различения молекул жира и воды в объекте исследования с использованием данных, собранных с последовательностью с произвольными двумя эхо во время МР сканирования, в соответствии, по меньшей мере, с одним аспектом, описанным в настоящей заявке.
Фигура 5 - схема способа различения молекул жира и воды в объекте исследования с использованием данных, собранных с последовательностью с произвольными двумя эхо во время МР сканирования, при этом в соответствии, по меньшей мере, с одним аспектом, описанным в настоящей заявке, используют расчетную дифференциальную фазовую погрешность Δφ, чтобы определить, которая из большой составляющей B и малой составляющей S измеренных сигналов соответствует воде и которая соответствует жиру.
Фигура 6 - схема примерной больничной системы, содержащей устройство MRI, которое формирует данные визуализации, которые реконструируются реконструирующим процессором для формирования отображаемых трехмерных изображений.
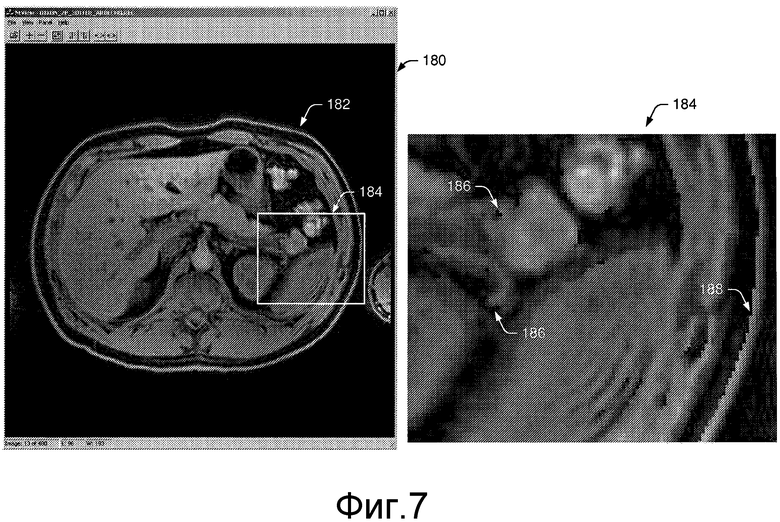
Фигура 7 - пример изображения поперечного сечения пациента, сформированного с использованием уравнений (12)-(14), при этом область изображения увеличена для демонстрации артефактов.
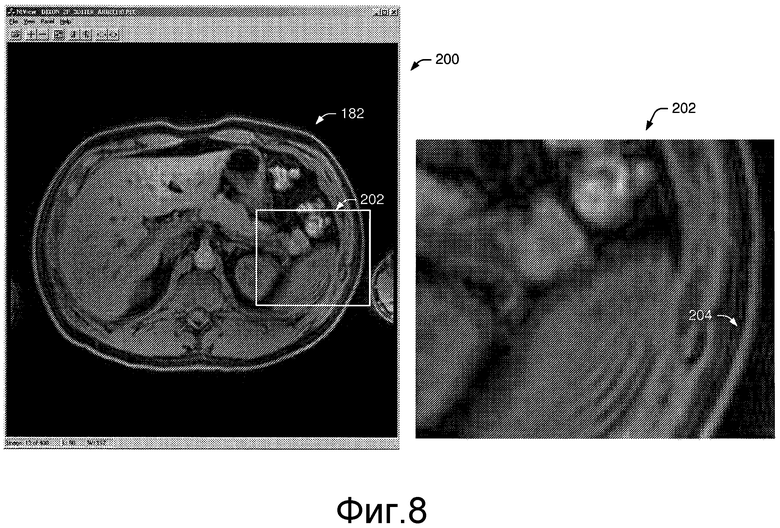
Фигура 8 - пример изображения поперечного сечения пациента, сформированного с использованием уравнений (15)-(17) для уменьшения артефактов и сглаживания контурных линий в изображении.
Фигура 9 - схема способа различения молекул жира и воды в объекте исследования с использованием данных, собранных с последовательностью с произвольными двумя эхо во время МР сканирования, при этом в соответствии, по меньшей мере, с одним аспектом, описанным в настоящей заявке, используют расчетную дифференциальную фазовую погрешность Δφ, чтобы определить, которая из большой составляющей B и малой составляющей S измеренных сигналов соответствует воде и которая соответствует жиру, причем принято допущение, что составляющие воды и жира являются комплексными величинами.
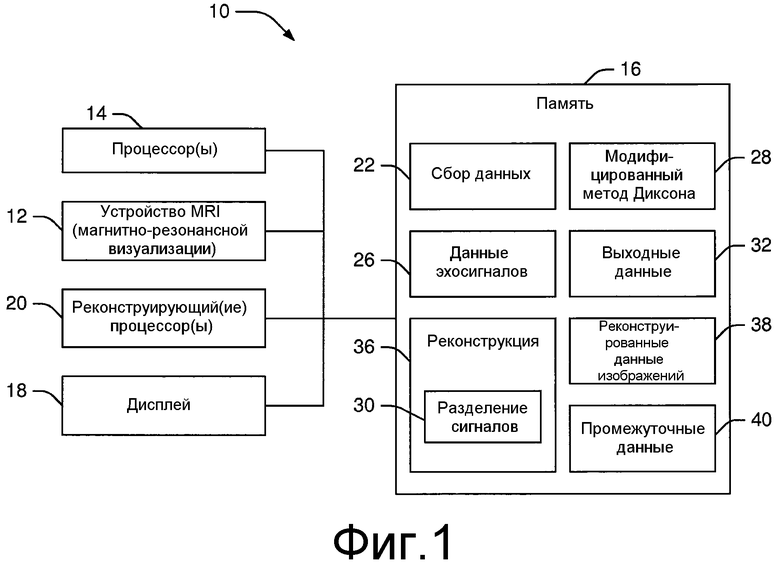
На фигуре 1 представлена система 10, которая способствует смягчению ограничительных условий, налагаемых на времена эха, используемые при исполнении двухточечного метода Диксона во время МР сканирования, для повышения эффективности сканирования и повышения пространственно-временного разрешения и расширения зоны покрытия, в соответствии, по меньшей мере, с одним аспектом, описанным в настоящей заявке. Система содержит устройство MRI 12, которое связано с процессором 14, который исполняет, и память 16, которая хранит, по меньшей мере, один набор исполняемых компьютером команд или алгоритмов для выполнения МР сканирования для сбора данных, в соответствии с описанием настоящей заявки. Устройство MRI, процессор и память дополнительно связаны с дисплеем 18 и, по меньшей мере, одним реконструирующим процессором 20, который реконструирует собранные и/или обработанные данные МР сканирования в МР изображение для вывода на дисплей 18.
Программное обеспечение для сбора МР данных записано в память 16 и исполняется процессором(ами) 14, чтобы собирать МР данные 26 в процессе сканирования объекта исследования, расположенного в области исследования устройства MRI 12 во время МР сканирования. В память записано программное обеспечение 28 для дискретизации эхосигнала по модифицированному методу Диксона для исполнения процессором и облегчает сбор данных 26 двухточечного эхосигнала при гибких произвольных временах эхо, без требования к тому, чтобы каждое время эхо имело фиксированную фазу, в соответствии с различными аспектами, описанными в настоящей заявке.
После того как МР данные 26 получают в результате исполнения программного обеспечения 22 для сбора МР данных с программным обеспечением 28 модифицированного метода Диксона, выполняется разделение 30 сигналов. В одном примере сбор МР данных является получением эхосигналов (например, спинового эха, градиентного эха и т.п.). Разделение сигналов достигается решением множества математических уравнений, которые используют данные 26 в качестве входных данных и обеспечивают в качестве выходных данных интенсивность сигнала от каждой из фракций, подлежащих разделению. Упомянутые выходные данные 32 интенсивности сигналов записываются в память 16 и применяются во время исполнения алгоритмов 36 реконструкции реконструирующим(и) процессором(ами) 20 для формирования реконструированного МР изображения с тканями выделенных различных типов. Разделение является формой реконструкции, при которой сигнал для каждого пикселя разбивается (или разделяется) на составляющие, исходящие от разных фракций, например, воды и жира.
Нижеследующее описание приведено для дополнительно пояснения функции алгоритма(ов) 36 разделения, использующих модифицированный метод Диксона, для конкретного примера жира (например, липида) и воды (например, в нежировой ткани) в объекте исследования при его МР сканировании. При использовании модифицированного метода Диксона два сигнала I1 и I2, измеренных с двумя разными временами эха, имеют следующее математическое описание:


 (1)
(1)



 (2)
(2)
где W и F являются вкладом воды и жира, соответственно, в полный сигнал (то есть W и F являются положительными действительными числами), Θ1 и Θ2 являются известными фазовыми углами вода-жир при двух временах эхо, и φ1 и φ2 представляют фазовые погрешности (например, для соответствующих сигналов), обусловленные такими несовершенствами системы, как неоднородности основного магнитного поля и т.п. Поскольку значения фазовых погрешностей не известны, то прямое определение W и F из уравнений (1) и (2) оказывается невозможным. Следовательно, в данном случае процессор оценивает «большую» составляющую B и «малую» составляющую S соответствующих сигналов из уравнений (1) и (2). Составляющие B и S сигналов могут записываться в память 16 в виде промежуточных данных 40. Одна из составляющих B и S представляет W, а другая представляет F, но распределение не известно, пока не выполнена дополнительная обработка. Поэтому для решения упомянутой задачи распределения определяются фазовые погрешности.
В существующих подходах к разделению воды и жира двухточечным методом Диксона, оценка фазовых погрешностей основана на допущении, что данные погрешности являются пространственно сглаженными функциями, т.е. подвержены лишь медленным изменениям по полю сканирования. Пределы справедливости упомянутого допущения зависят от величины фазовых погрешностей. Поскольку φ2 можно разложить на фазовую погрешность φ1 и менее значительную дифференциальную фазовую погрешность Δφ, которая удовлетворяет допущению о гладкости намного лучше, чем φ2, то оценка упрощается при выборе Θ1=0, что приводит к следующей модификации уравнений (1) и (2):

 (3)
(3)


 (4)
(4)
В данном случае фаза I1 равна фазовой погрешности φ1, которую можно скорректировать следующим образом:
 (5)
(5)
 (6)
(6)
В таком случае остается найти дифференциальную фазовую погрешность Δφ (например, разность между φ1 и φ2). С использованием уравнения (6) вычисляются два возможных варианта Δφ: один возможный вариант вычисляется в предположении, что «большая» составляющая B является водой и «малая» составляющая S является жиром, и другой возможный вариант вычисляется в предположении, что S является водой и B является жиром, так что

 (7)
(7)
 (8)
(8)
Правильное распределение B и S между W и F пространственно изменяется, т.е. упомянутое распределение может изменяться от пикселя к пикселю. Следовательно, Δφ выбирают из двух возможных вариантов отдельно для каждого пикселя, чтобы общее решение было как можно более гладким. Приведенный подход, согласно которому предполагается, что Θ2 mod π≠0 (остаток от деления Θ2 на π не равен нулю), известен (смотри, например, Xiang QS. Two-point water-fat imaging with partially-opposed-phase (POP) acquisition: an asymmetric Dixon method. Magn Reson Med 2006; 56:572-584.). После получения оценки Δφ полученную оценку можно исключить из уравнения (6), и W и F можно вычислить из уравнений (5) и (6).
В соответствии с, по меньшей мере, одним аспектом, описанным в настоящей заявке, вышеприведенный подход обобщен в отношении уравнений (1)-(6) таким образом, что Θ1≠0. Например, B и S вычисляются по уравнениям (1) и (2), как изложено выше, с единственным ограничивающим условием Θ1≠±Θ2. Проблемой становится оценка фазовых погрешностей и вычисление W и F. Кроме того, следует дополнительно отметить, что для вычисления W и F оценка φ1 оказывается не обязательной. Например, если I1 умножать на величину, сопряженную I2, то полученное уравнение зависит только от W, F, Θ1, Θ2 и Δφ так, что
 (9)
(9)
Вновь вычисляют B и S, но в данном случае в обобщенной форме, в соответствии с уравнениями 1 и 2 в упомянутой статье Ксианга (Xiang). Из уравнения (9) можно вывести два возможных варианта дифференциальной фазовой погрешности, как из уравнений (7) и (8), так что
 (10)
(10)
 (11)
(11)
Из двух приведенных возможных вариантов выбирается фактическая дифференциальная фазовая погрешность Δφ обычно с учетом допущения гладкости, либо как описано выше, либо любым другим подходящим способом. Поскольку φ1 не известно, то уравнения (5) и (6) нельзя применить для вычисления W и F. Однако можно вывести три уравнения, которые не зависят от φ1 и φ2:
 (12)
(12)
 (13)
(13)
 (14)
(14)
Уравнение (12) представляет квадрат величины первого эхосигнала I1, и уравнение (13) представляет квадрат величины второго эхосигнала I2. Уравнение (14) приведено, чтобы можно было найти решение для W и F. В одном примере решение для W и F получается применением метода наименьших квадратов (например, применением метода Ньютона). Из одних уравнений (12) и (13) можно вычислить только B и S, но при получении оценки Δφ вышеописанным методом из уравнений (12-(14) можно однозначно вычислить W и F, как можно видеть на изображениях в клиническом примере, представленном на фигурах 2 и 3. В альтернативном варианте относительно всех неизвестных можно решить уравнение сигнала (уравнения (3)-(4)).
В соответствии с одним вариантом осуществления, процессор 14 взвешивает сигнал I2 перед решением трех уравнений (12-14), чтобы скомпенсировать затухание сигнала между двумя временами эхо, с использованием априорного знания постоянных времени релаксации.
В соответствии с другим вариантом осуществления, процессор 14 применяет двухточечный метод Диксона, описанный в настоящей заявке (или любой другой), к поднабору данных, собранных с использованием трехточечного метода Диксона, чтобы воспользоваться избыточностью, обеспечить непротиворечивость и повысить надежность и точность трехточечного метода Диксона.
Следует понимать, что процессор 14 исполняет и память 16 хранит исполняемые компьютером команды для выполнения различных функций и/или способов, описанных в настоящей заявке. Память 16 может быть машиночитаемым носителем информации, на котором хранится управляющая программа, например диском, жестким диском и т.п. Широко распространенные формы машиночитаемых носителей информации содержат, например, флоппи-диски или дискеты, жесткие диски, магнитную ленту или любой магнитный носитель для хранения информации, CD-ROM (постоянную память на компакт-дисках), DVD (универсальные цифровые диски) или любой другой оптический носитель информации, RAM (оперативное запоминающее устройство), ROM (постоянное запоминающее устройство, PROM (программируемое постоянное запоминающее устройство), EPROM (перепрограммируемое постоянное запоминающее устройство), FLASH-EPROM (перепрограммируемое постоянное запоминающее устройство флэш-типа), варианты вышеперечисленных устройств, другую микросхему или кассету памяти или любой другой физический носитель информации, с которого процессор 14 может считывать и исполнять команды. В таком контексте систему 10 можно выполнить в составе или в виде, по меньшей мере, одного универсального компьютера, специализированного компьютера, программируемого микропроцессора или микроконтроллера и периферийных элементов на интегральных схемах, ASIC (специализированной интегральной схемы) или другой интегральной схемы, цифрового процессора сигналов, аппаратно-реализованной электронной или логической схемы, например схемы на дискретных элементах, программируемого логического устройства, например PLD (программируемой логической интегральной схемы), PLA (программируемой логической матрицы), FPGA (программируемой вентильной матрицы), графического центрального процессора (GPU (графического процессора) или PAL (программируемой матричной логики) и т.п.
На фигуре 2 представлен пример изображения 70 воды (со слабым контрастом), вычисленного с использованием систем и способов, описанных в настоящей заявке, по данным, собранным с последовательностью с двумя эхо, при 3T, с временами эха 1,14 мс и 2,13 мс, соответствующими фазовым углам (Θ) вода-жир 179° и 333°.
На фигуре 3 представлен пример изображения 80 жира (со слабым контрастом), вычисленного с использованием систем и способов, описанных в настоящей заявке, по данным, собранным с последовательностью с двумя эхо, при 3T, с временами эха 1,14 мс и 2,13 мс, соответствующими фазовым углам (Θ) вода-жир 179° и 333°.
На фигуре 4 представлен способ различения молекул жира и воды в объекте исследования с использованием данных, собранных с последовательностью с произвольными двумя эхо во время МР сканирования, в соответствии, по меньшей мере, с одним аспектом, описанным в настоящей заявке. На этапе 110 два сигнала I1 и I2 измеряют во время МР сканирования с использованием модифицированного метода Диксона. На этапе 112 вычисляют большую и малую составляющие B и S сигналов I1 и I2. На этапе 114 из вычисленных сигналов выводят возможные варианты дифференциальной фазовой погрешности. На этапе 116 выбирают один возможный вариант дифференциальной фазовой погрешности и выполняют определение относительно того, которая из составляющих B и S соответствует воде (W) и которая из составляющих соответствует жиру или липиду (F). На этапе 118 реконструируют МР изображения для отображения на этапе 120 селективного содержания воды и жира в сигнале.
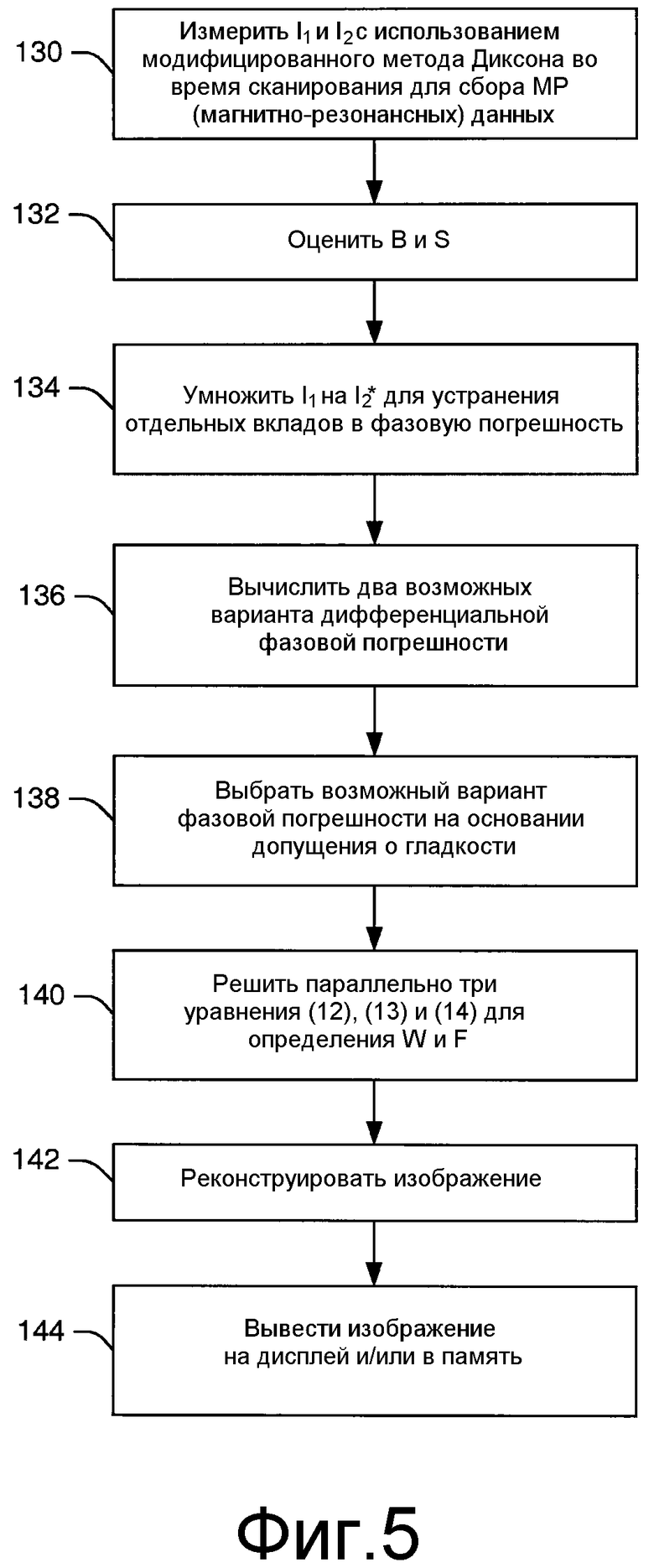
На фигуре 5 представлен способ различения молекул жира и воды в объекте исследования с использованием данных, собранных с последовательностью с произвольными двумя эхо во время МР сканирования, при этом в соответствии, по меньшей мере, с одним аспектом, описанным в настоящей заявке, используют расчетную дифференциальную фазовую погрешность Δφ, чтобы определить, которая из большой составляющей B и малой составляющей S измеренных сигналов соответствует воде и которая соответствует жиру. На этапе 130 используют модифицированный метод Диксона для измерения двух сигналов, I1 и I2, с двумя разными временами эхо во время сбора МР данных. На этапе 132 оценивают «большую» составляющую B и «малую» составляющую S соответствующих сигналов (например, по уравнениям (1) и (2)) с единственным ограничительным условием, что Θ1≠±Θ2. На этапе 134 сигнал I1 умножают на величину, сопряженную I2, при этом полученное уравнение зависит только от W, F, Θ1, Θ2 и Δφ, как указано в уравнении (9).
На этапе 136 выводят два возможных варианта дифференциальной фазовой погрешности, как указано в уравнениях (10) и (11). На этапе 138 из двух возможных вариантов выбирают фактическую дифференциальную фазовую погрешность Δφ, как пояснялось выше, с учетом допущения о гладкости. На этапе 140 выводят три следующих уравнения, которые не зависят от φ1 и φ2:
(12)
(13)
 (14)
(14)
На этапе 142 три уравнения параллельно решают для определения W и F.
Затем на этапе 144 данные МР сканирования MR реконструируют в изображение. Изображение выводится для пользователя (например, на дисплей 18, показанный на фигуре 1) или на этапе 146 записывается в память (например, в память 16, показанную на фигуре 1).
В одном варианте осуществления способы, описанные в настоящей заявке, дополнительно содержат взвешивание сигнала I2 перед решением трех уравнений (12-14) для компенсации затухания сигнала между двумя временами эхо, с использованием априорного знания постоянных времени релаксации.
В другом варианте осуществления способы, описанные в настоящей заявке, содержат применение двухточечного метода Диксона (например, любого подходящего двухточечного метода Диксона) к поднаборам данных, собранных в процессе сбора данных по трехточечному методу Диксона, чтобы воспользоваться избыточностью, обеспечить непротиворечивость и повысить надежность и точность трехточечных методов Диксона.
Как показано на фигуре 6, примерная больничная система 150 может содержать устройство визуализации, например устройство MRI 12 или подобное устройство, которое формирует данные визуализации, которые реконструируются реконструирующим процессором 152 для формирования отображаемых трехмерных изображений. Отображаемые изображения передаются по сети 154 в центральную память 156 или местную память 158.
На станции 160, соединенной с сетью, оператор использует пользовательский интерфейс 162 для перемещения выбранного трехмерного МР изображения пациента в центральную память 156 или местную память 158 или между ними. Видеопроцессор 166 отображает выбранное МР изображение в первой области 118 1 просмотра дисплея 18. Второе МР изображение можно отображать во второй области 118 2 просмотра. Например, изображение 70 воды, показанное на фигуре 2, можно отображать в первой области просмотра, и изображение 80 жира, показанное на фигуре 3, можно отображать во второй области просмотра. Третья область 118 3 просмотра может отображать совмещенные изображения из первой и второй областей просмотра. По желанию пользователь может манипулировать совмещенным изображением в третьей области просмотра в пределах диапазона относительных весовых коэффициентов данных изображений жира и воды. В одном варианте осуществления пользовательский интерфейс содержит кнопку или скользящий указатель (не показан), который пользователь может использовать для настройки совмещенного изображения в промежутке от данных одного изображения жира до данных одного изображения и в любое положение между упомянутыми пределами.
Данные изображения жира, изображения воды и/или совмещенного изображения можно использовать для других применений. Например, станция 170 планирования терапии может использовать данные изображения для планирования сеанса терапии. После планирования соответственно требованиям оператора план терапии можно, в соответствии с автоматизированной процедурой, переносить в лечебное устройство 172, которое реализует запланированный сеанс. Другие станции могут использовать данные изображения жира и/или воды в различных других процессах планирования.
Фигуры 7-8 относятся к варианту осуществления, в котором члены для воды и жира, которые вычисляют по входным данным, использующим вычисленную карту дифференциальных фаз, принято считать комплексными величинами, для уменьшения артефактов, которые могут возникать при использовании уравнений (12)-(14). В результате получается линейная система уравнений (15), (16), которая допускает несложное решение и уменьшает или устраняет артефакты, которые могут возникать в результате решения уравнений (12)-(14). В соответствии с одним вариантом осуществления, системы и способы выполняются, как описано в настоящей заявке со ссылкой на фигуры 1-6, за исключением того, что вместо уравнений (12)-(14) (например, описанных со ссылкой на фигуры 1 и 5) подставляют и соответственно решают уравнения (15)-(16).
При данном подходе W и F считаются комплексными величинами. Их заменяют величинами  и
и  в уравнениях (1) и (2) сигнала для исключения
в уравнениях (1) и (2) сигнала для исключения  и
и  , что приводит к системе из двух линейных комплексных уравнений
, что приводит к системе из двух линейных комплексных уравнений
 (15)
(15)
 ,
,  (16)
(16)
где W' и F' являются комплекснозначными членами для воды и жира, и θ1 и Θ2 являются известными фазовыми углами вода-жир при двух временах эха, φ представляет фазовые погрешности, обусловленные несовершенствами системы, например неоднородностью основного поля и т.п., и, следовательно, Δφ является подобным фазовым членом, но представляющим разность по фазе между двумя эхо. С учетом того, что данные и дифференциальная фаза в комплексной амплитуде формируют eiΔφ, можно несложно вычислить комплекснозначные члены для воды и жира. Для окончательных изображений принимаются абсолютные величины членов для воды и жира.
После того как оценка eiΔφ получена описанным способом, приведенная система уравнений решается аналитически (например, процессором 14, показанным на фигуре 1) посредством уравнения
 , (17)
, (17)
и дает непосредственно величину сигнала воды и жира, так как |W|=|W'| и |F|=|F'|.
В одном варианте осуществления сигнал I2 умножается на весовые коэффициенты (например, в процессоре 14) перед решением трех уравнений для компенсации затухания сигнала между двумя временами эхо, с использованием априорного знания постоянных времени релаксации.
Соответственно, на фигуре 7 представлен пример изображения 180 поперечного сечения 182 пациента, сформированного с использованием уравнений (12)-(14), при этом область 184 изображения увеличена для демонстрации артефактов 186. Показаны также ступенчатые контурные линии 188. Данное изображение можно сформировать с использованием систем и способов, описанных в настоящей заявке, с помощью уравнений (12)-(14). Однако чтобы уменьшить артефакты и сгладить контурные линии, вместо уравнений (12)-(14) можно воспользоваться уравнением (17), как показано для изображения, представленного на фигуре 8.
На фигуре 8 представлен пример 200 изображения поперечного сечения 182 пациента, сформированного с использованием уравнения (17) для уменьшения артефактов и сглаживания контурных линий в изображении. Область 202 изображения увеличена для демонстрации отсутствия артефактов 186, наблюдаемых на фигуре 7. Кроме того, контурные линии 204 являются значительно более гладкими, чем контурные линии 188 в изображении на фигуре 7.
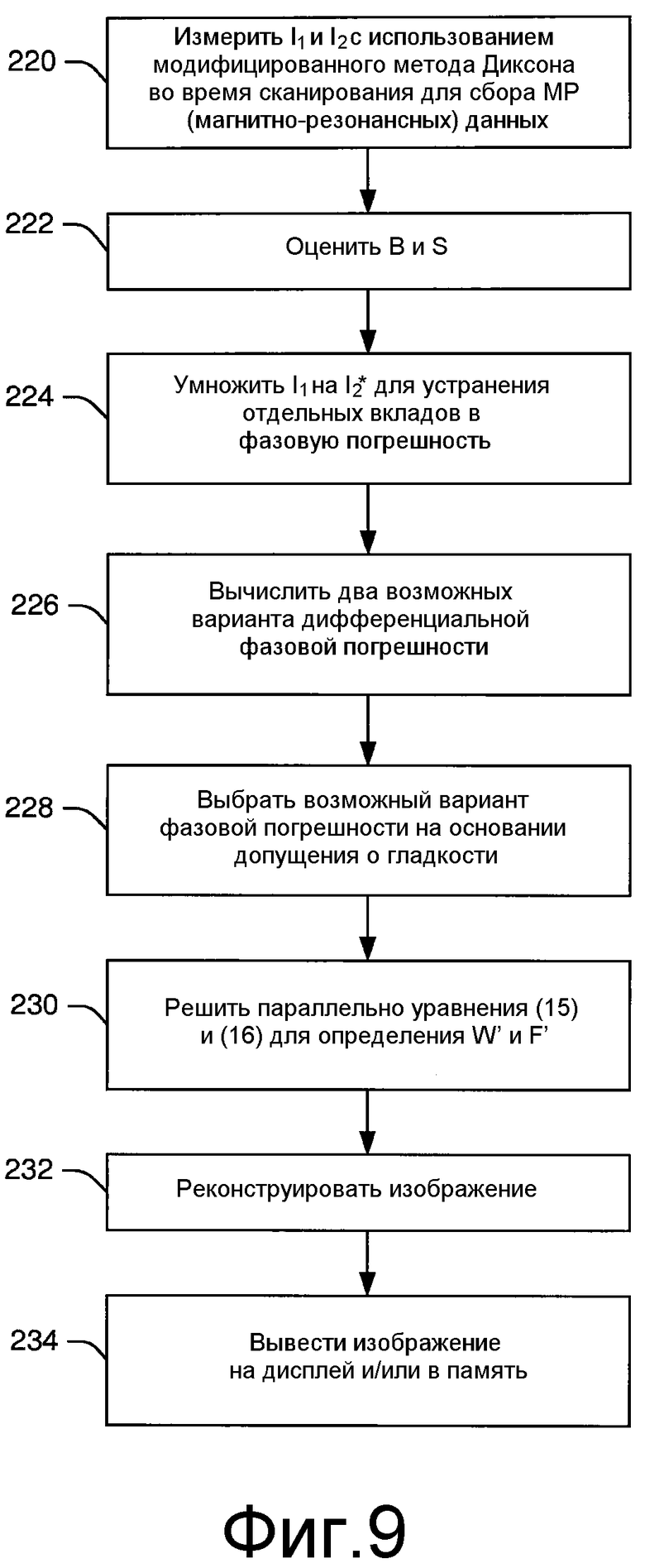
На фигуре 9 представлен способ различения молекул жира и воды в объекте исследования с использованием данных, собранных с последовательностью с произвольными двумя эхо во время МР сканирования, при этом в соответствии, по меньшей мере, с одним аспектом, описанным в настоящей заявке, используют расчетную дифференциальную фазовую погрешность Δφ, чтобы определить, которая из большой составляющей B и малой составляющей S измеренных сигналов соответствует воде и которая соответствует жиру, и причем принято допущение, что составляющие воды и жира являются комплексными величинами. На этапе 220 применяется модифицированный метод Диксона для измерения двух сигналов, I1 и I2, при двух разных временах эхо, во время сбора МР данных. На этапе 222 выполняется оценка, например, по уравнениям (1) и (2)) «большой» составляющей B и «малой» составляющей S соответствующих сигналов, с единственным ограничительным условием, что Θ1≠±Θ2. На этапе 224 сигнал I1 умножается на величину, сопряженную I2, при этом полученное уравнение зависит только от W, F, Θ1, Θ2 и Δφ, как показано в уравнении (9).
На этапе 226 выводят два возможных варианта дифференциальной фазовой погрешности, как показано уравнениями (10) и (11). На этапе 228 из двух возможных вариантов выбирается фактическая дифференциальная фазовая погрешность Δφ, как изложено выше, с учетом допущения гладкости. На этапе 230, выводятся следующие два уравнения, которые не зависят от φ1 и φ2:
 (15)
(15)
(16)
На этапе 232 два уравнения параллельно решаются для определения W' и F'

 (17)
(17)
Затем данные МР сканирования реконструируются в изображение на этапе 234. Изображение выводится для пользователя (например, на дисплее 18, показанном на фигуре 1) или записываются в память (например, память 16, показанную на фигуре 1) на этапе 236.
В одном варианте осуществления способы, описанные в настоящей заявке, дополнительно содержат этап взвешивания сигнала I2 перед решением трех уравнений (15)-(17), чтобы компенсировать затухание сигнала между двумя временами эха, с использованием априорного знания постоянных времени релаксации.

Использование: для магнитно-резонансной визуализации. Сущность изобретения заключается в том, что при проведении различия между жиром и водой в собранных МР (магнитно-резонансных) данных модифицированный метод Диксона содержит получение первого и второго сигналов, I1 и I2, вычисление первой и второй составляющих, B и S сигналов I1 и I2, при этом одна из первой и второй составляющих соответствует жиру, и другая соответствует воде, получение двух возможных вариантов дифференциальной фазовой погрешности из упомянутых составляющих и выбор возможного варианта фазовой погрешности на основании допущения о гладкости возмущающей неоднородности поля. Затем выполняется точное определение абсолютных значений составляющих воды и жира посредством решения трех уравнений сигналов относительно двух переменных параметров, которые, соответственно, относятся к воде и жиру, с применением, например, метода наименьших квадратов с минимизацией по методу Ньютона. Технический результат: обеспечение возможности сокращения времени сканирования, повышения качества изображения, а также повышение гибкости выбора параметров протокола. 3 н. и 12 з.п. ф-лы, 9 ил.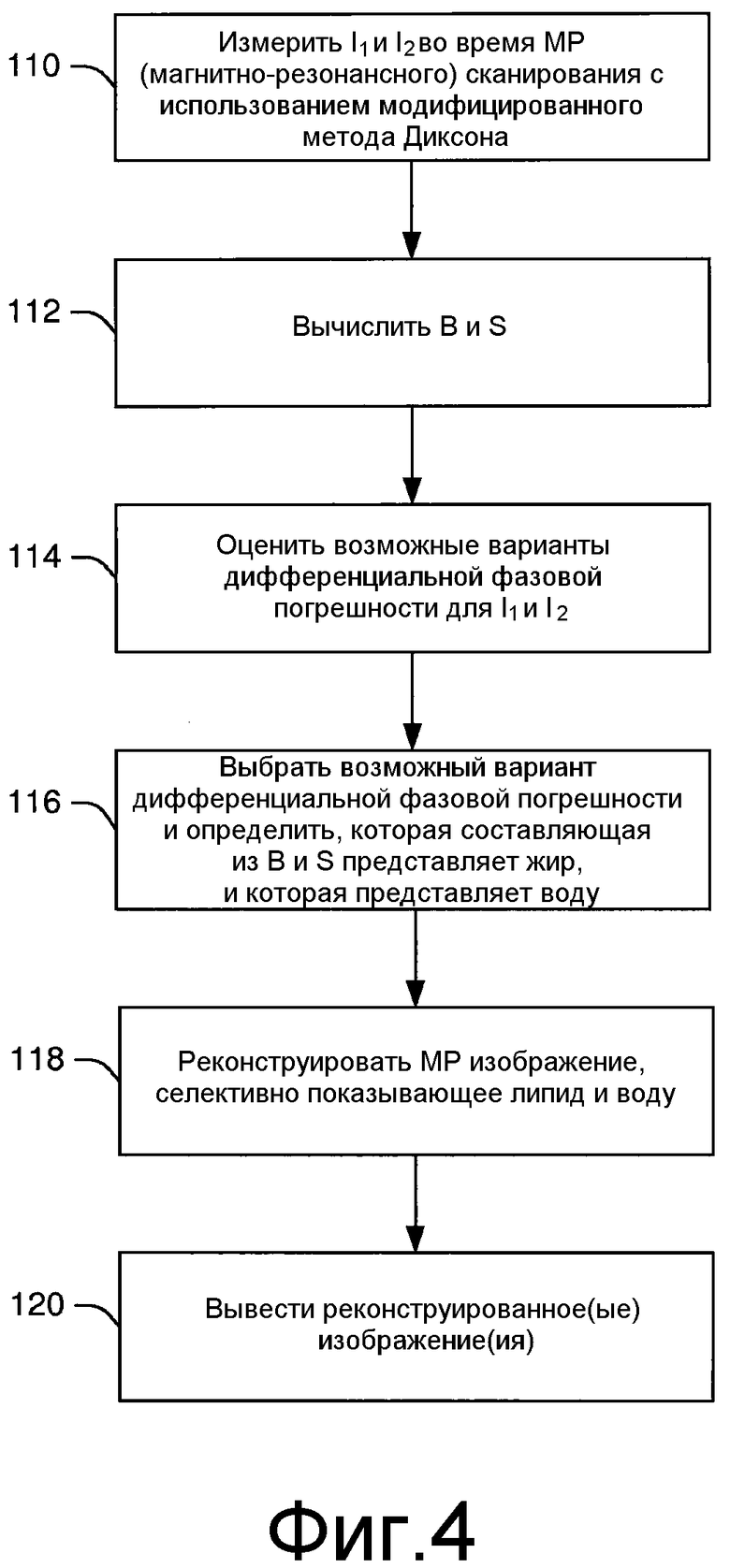
1. Способ дифференциации между водой и жировой тканью в данных магнитно-резонансного изображения (MRI), содержащий следующие этапы:
измеряют первый сигнал (I1) и второй сигнал (I2) с разными произвольными временами эха во время магнитно-резонансного (МР) сканирования объекта исследования;
вычисляют первую и вторую составляющие (В, S) из первого и второго сигналов;
получают два возможных варианта (Δφ1, Δφ2) дифференциальной фазовой погрешности из первой и второй составляющих (В, S);
выбирают для каждого пикселя один из полученных возможных вариантов дифференциальной фазовой погрешности (Δφ) на основании допущения о гладкости возмущающей неоднородности поля;
реконструируют изображение (70) воды и изображение (80) жира с использованием выбранного возможного варианта дифференциальной фазовой погрешности (Δφ).
2. Способ по п.1, в котором первая составляющая (В) больше чем или равна второй составляющей (S), и при этом два возможных варианта дифференциальной фазовой погрешности получают с использованием следующих уравнений:


где В означает первую составляющую, S означает вторую составляющую, Θ1 означает фазовый угол вода-жир первого сигнала I1, Θ2 означает фазовый угол вода-жир второго сигнала I2, и Δφ1 и Δφ2 означают возможные варианты дифференциальной фазовой погрешности; и
причем способ дополнительно содержит применение ограничительного условия Q1≠Θ2.
3. Способ по любому из п.1 или 2, дополнительно содержащий следующий этап:
определяют, которая из первой и второй составляющих представляет вклад в сигнал от жировой ткани и которая из первой и второй составляющих представляет вклад в сигнал от ткани с водой.
4. Способ по любому из п.1 или 2, дополнительно содержащий следующий этап:
для каждого пикселя параллельно решают три уравнения для вычисления сигнала от жира и воды из данных MRI, при этом три уравнения имеют вид:



где W означает вклад в сигнал от воды, и F означает вклад в сигнал от жира; и
причем способ дополнительно содержит этап взвешивания сигнала I2 перед решением трех уравнений, чтобы компенсировать затухание сигнала между двумя временами эха, с использованием априорного знания ожидаемых постоянных времени релаксации.
5. Способ по любому из п.1 или 2, в котором применяют двухточечный метод Диксона к поднаборам данных из данных, собранных, по меньшей мере, трехточечным методом Диксона, чтобы воспользоваться избыточностью, обеспечить непротиворечивость и повысить надежность и точность, по меньшей мере, трехточечного метода Диксона.
6. Способ по любому из п.1 или 2, дополнительно содержащий следующие этапы:
реконструируют МР данные в МР изображение (38) и
выводят МР изображение на дисплей (18) или в память (16).
7. Машиночитаемый носитель (16) информации, содержащий программное обеспечение для управления процессором (14) с тем, чтобы выполнять способ по любому из предыдущих пунктов.
8. Система, которая использует модифицированный метод Диксона для дифференциации между водой и жировой тканью в данных магнитно-резонансной визуализации (MRI), при этом система содержит:
процессор (14), запрограммированный с возможностью
измерения первого сигнала (I1) и второго сигнала (I2) с разными произвольными временами эха во время магнитно-резонансного (МР) сканирования объекта исследования,
вычисления первой и второй составляющих (В, S) из первого и второго сигналов,
получения двух возможных вариантов (Δφ1, Δφ2) дифференциальной фазовой погрешности из первой и второй составляющих, и
выбор для каждого пикселя одного возможного варианта дифференциальной фазовой погрешности (Δφ) на основании допущения о гладкости возмущающей неоднородности поля;
реконструирующий процессор (20), который реконструирует изображение (70) воды и изображение (80) жира, с использованием выбранного возможного варианта дифференциальной фазовой погрешности; и
память (16), которая хранит реконструированные изображения (38).
9. Система по п.8, в которой первая составляющая больше чем или равна второй составляющей, и при этом процессор (14) получает два возможных варианта дифференциальной фазовой погрешности с использованием следующих уравнений:
где В означает первую составляющую, S означает вторую составляющую, Θ1 означает фазовый угол вода-жир первого сигнала I1, Θ2 означает фазовый угол вода-жир второго сигнала I2, и Δφ1 и Δφ2 означают возможные варианты дифференциальной фазовой погрешности; и
причем процессор применяет ограничительное условие Q1≠Θ2.
10. Система по любому из п.8 или 9, дополнительно содержащая
выполнение определения относительно того, которая из первой и второй составляющих (В, S) представляет вклад в сигнал от жировой ткани и которая из первой и второй составляющих представляет вклад в сигнал от ткани с водой.
11. Система по п.8, в которой процессор (14) параллельно решает три уравнения для вычисления сигнала от жира и воды, при этом три уравнения имеют вид:
где W означает вклад в сигнал от воды, и F означает вклад в сигнал от жира; и
причем процессор (14) взвешивает сигнал I2 перед решением трех уравнений, чтобы компенсировать затухание сигнала между двумя временами эха, с использованием априорного знания ожидаемых постоянных времени релаксации.
12. Система по п.8, в которой процессор (14) применяет двухточечный метод Диксона к поднаборам данных из данных, собранных, по меньшей мере, трехточечным методом Диксона, чтобы воспользоваться избыточностью, обеспечить непротиворечивость и повысить надежность и точность, по меньшей мере, трехточечного метода Диксона.
13. Система по п.8, дополнительно содержащая
дисплей (18), на котором отображается, по меньшей мере, какое-то одно из изображения (70) воды и изображения (80) жира или объединение обоих упомянутых изображений.
14. Система по п.13, дополнительно содержащая
первую и вторую области (1181, 1182) просмотра на дисплее (18), в которых отображаются, соответственно, изображение (70) воды и изображение (80) жира.
15. Система по п.14, дополнительно содержащая
третью область (1183) просмотра на дисплее (18), в которой изображение (70) воды и изображение (80) жира совмещаются или объединяются между собой, с возможностью настройки.
| XIANG QING-SAN, Two-point water-fat imaging with partially-opposed-phase (POP) acquisition: an asymmetric Dixon method, MAGNETIC RESONANCE IN MEDICINE, 20060901 ACADEMIC PRESS, DULUTH, MN, US - ISSN 0740-3194, vol 56, no | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для выпуска сточных вод в реки | 1923 |
|
SU572A1 |
| US 2003062900A1, 03.04.2003 | |||
| Сигнатурный анализатор | 1989 |
|
SU1635184A1 |
| JP 2000135206A, 16.05.2000 | |||
| WO 9954751A1, 28.10.1999 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ЖИРА В МАРГАРИНЕ | 2006 |
|
RU2308709C1 |

