Родственные заявки
Для настоящей заявки приоритет испрашивается по предварительной патентной заявке США №62/617,062 «Переключение контроллера в реальном времени», поданной 12 января 2018 г., и по патентной заявке Нидерландов № N2020618 «Переключение контроллера в реальном времени», поданной 20 марта 2018 г. Все содержание вышеупомянутых заявок включено в настоящий документ посредством ссылки.
Уровень техники
Многочисленным достижениям в области биологии способствовали усовершенствования систем и способов получения изображений, например, используемых в оптических микроскопах и системах сканирования изображений. Для успешного получения изображений с использованием таких систем получения изображений большое значение имеет возможность точной фокусировки в ходе получения изображения. Для быстрого получения высококачественных изображений также важна возможность сканирования с высокой скоростью.
Операции фокусировки при формировании модели фокуса и при сканировании изображения часто связаны с перемещением предметного столика относительно оптического столика; целью этого перемещения является помещение образца в фокальную плоскость объектива или другой оптики, установленной на оптическом столике. Как правило, для перемещения оптического столика и/или предметного столика с целью фокусировки используется исполнительное устройство, например мотор, катушка или иная приводная система. Для точного управления исполнительным устройством может использоваться сервосистема.
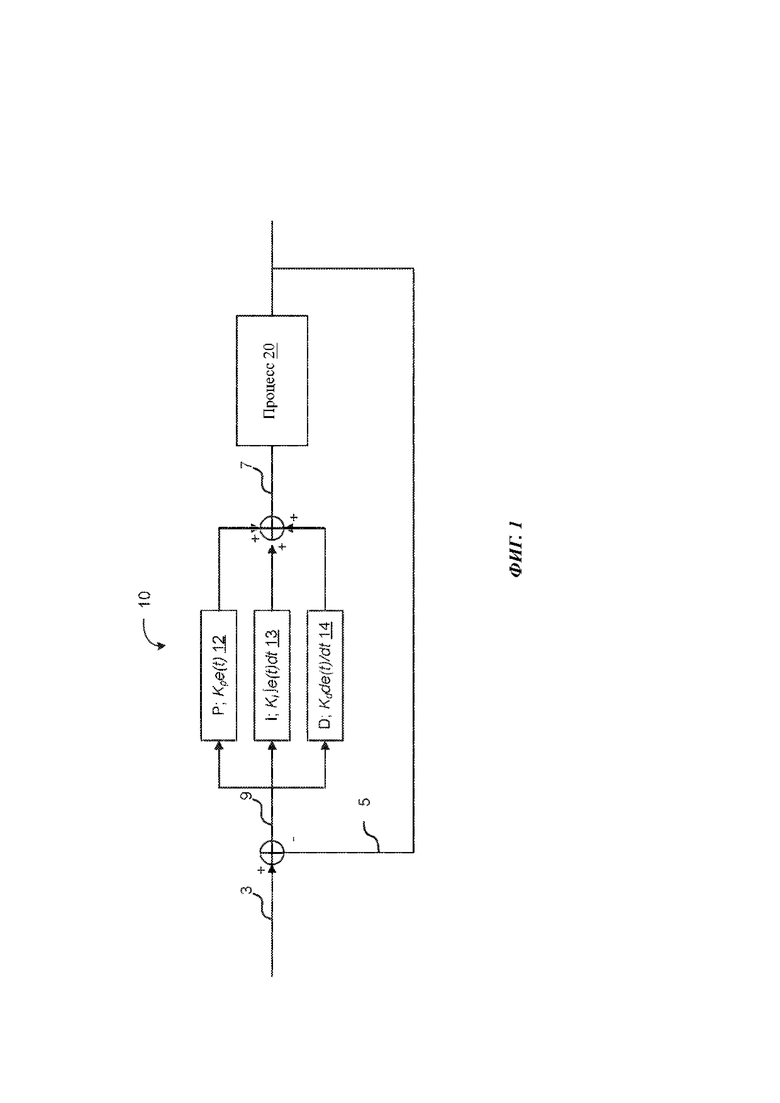
Фиг. 1 представляет пример сервосистемы, которая может быть использована для управления исполнительным устройством. В данном примере в сервосистему подан управляющий сигнал 3, задающий требуемое положение исполнительного устройства. Вычитанием сигнала 5 обратной связи от управляемого процесса 20 из управляющего сигнала 3 формируют сигнал 9 ошибки, указывающий ошибку фактического положения относительно требуемого положения. Сервоконтроллер 10 корректирует сигнал 7, выдаваемый для управления исполнительным устройством, на основании величины этой ошибки. В данном примере сервосистема представляет собой пропорциональный-интегрирующий-дифференцирующий регулятор (ПИД-регулятор), содержащий пропорциональный регулятор 12, интегрирующий регулятор 13 и дифференцирующий регулятор 14.
Раскрытие изобретения
Системы и способы, раскрытые в настоящем документе, могут использоваться для оптимизации системы сервоуправления, применяемой для управления исполнительным устройством, используемым в операциях фокусировки в системе получения изображений. Эти способы оптимизации могут быть реализованы так, чтобы в ходе работы системы получения изображений было возможно распознавание текущего режима работы системы получения изображений. Таким режимом работы может быть, например, режим формирования модели фокуса и режим получения изображения или секвенирования. В некоторых реализациях для оптимизации системы сервоуправления в разных режимах работы могут использоваться разные наборы рабочих параметров системы сервоуправления. Соответственно, в вариантах осуществления может предусматриваться возможность определения набора рабочих параметров, оптимизирующих систему сервоуправления в распознанном режиме работы, и использования этого набора в сервосистеме. В различных реализациях это может выполняться в реальном времени в ходе работы системы получения изображений и переключения между режимами. Когда режим работы меняется, для оптимизации системы сервоуправления для нового режима работы могут выбирать и использовать новый набор рабочих параметров. Эти изменения тоже могут выполняться в реальном времени в ходе работы системы получения изображений.
Некоторые реализации технологии, описанной в настоящем документе, могут содержать систему получения изображений, содержащую предметный столик, содержащий поверхность для установки образца, подлежащего сканированию указанной системой получения изображений; оптический столик, содержащий объектив и выполненный с возможностью изменения положения относительно указанного предметного столика; исполнительное устройство, физически соединенное по меньшей мере с одним из предметного столика и оптического столика для перемещения предметного столика относительно оптического столика; сервосхему для управления указанным исполнительным устройством; первый набор параметров управления для управления сервосхемой; второй набор параметров управления для управления сервосхемой; и схему сервоуправления, выполненную с возможностью применения к сервосхеме первого набора параметров управления, когда система получения изображений работает в первом режиме работы, и применения к сервосхеме второго набора параметров управления, когда система получения изображений работает во втором режиме работы. В некоторых реализациях системой получения изображений может быть секвенирующее устройство, первым режимом работы может быть режим формирования модели фокуса, а вторым режимом работы может быть режим секвенирования. Параметры управления могут включать в себя коэффициенты передачи в сервоконтурах и значения фильтров.
Схема сервоуправления также может содержать схему распознавания режима, выполненную с возможностью распознавания режима работы системы получения изображений, и схему выбора параметра, выполненную с возможностью применения набора параметров управления, соответствующего распознанному режиму работы.
Схема сервоуправления может дополнительно быть выполнена с возможностью распознавания режима работы системы получения изображений и выбора набора параметров управления для использования в распознанном режиме работы. Схема сервоуправления выполнена с возможностью применения первого или второго набора параметров управления, определенных в качестве набора параметров управления для распознанного режима работы.
По меньшей мере один из первого и второго наборов параметров управления могут оптимизировать с учетом конструктивных характеристик системы получения изображений. Оптимизация по меньшей мере одного из первого и второго наборов параметров управления может содержать использование системы получения изображений, просмотр диапазона значений параметра управления из набора из первого и второго наборов параметров управления, измерение устойчивости сервосхемы в ходе указанного просмотра и выбор значения параметра управления. Оптимизация по меньшей мере одного из первого и второго наборов параметров управления может содержать использование системы получения изображений, просмотр диапазона значений множества параметров управления из набора из первого и второго наборов параметров управления, измерение устойчивости сервосхемы в ходе указанного просмотра и определение оптимальных значений для указанного множества параметров управления.
Система получения изображений может дополнительно содержать схему автоподстройки фокуса, электрически соединенную с оптическим столиком; при этом схема сервоуправления может быть выполнена с возможностью включения обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в сканирующем режиме и с возможностью выключения обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в режиме формирования модели фокуса.
Исполнительное устройство может быть физически соединено с предметным столиком для перемещения предметного столика с целью регулировки расстояния между предметным столиком и оптическим столиком. Как вариант, исполнительное устройство может быть физически соединено с оптическим столиком для перемещения оптического столика с целью регулировки расстояния между предметным столиком и указанным оптическим столиком. В еще одном примере для регулировки расстояния между предметным столиком и оптическим столиком исполнительные устройства могут быть соединены и с предметным столиком, и с оптическим столиком.
В качестве дополнительного примера способ сервоуправления для системы получения изображений может содержать: в ходе работы системы получения изображений, определение схемой распознавания режима факта работы системы получения изображений в первом режиме работы; определение схемой сервоуправления первого набора параметров управления, выбранного для первого режима работы; применение схемой сервоуправления указанного определенного первого набора параметров управления к сервосхеме системы получения изображений, при этом сервосхема управляет работой исполнительного устройства, физически соединенного по меньшей мере с одним из предметного столика и оптического столика системы получения изображений, для перемещения предметного столика относительно оптического столика; и в случае обнаружения схемой распознавания режима во время работы системы получения изображений перехода системы получения изображений во второй режим работы, определение схемой сервоуправления второго набора параметров управления, выбранного для второго режима работы, и применение второго набора параметров управления к севросхеме. Указанный способ может дополнительно включать распознавание режима работы системы получения изображений схемой сервоуправления и выбор набора параметров управления для использования в распознанном режиме работы.
Примерные способы могут дополнительно включать распознавание режима работы системы получения изображений схемой сервоуправления и выбор набора параметров управления для использования в распознанном режиме работы. Схема сервоуправления выполнена с возможностью применения первого или второго набора параметров управления, определенных в качестве набора параметров управления для распознанного режима работы.
Некоторые способы могут дополнительно включать оптимизацию по меньшей мере одного из первого и второго наборов параметров управления для учета конструктивных характеристик системы получения изображений. Оптимизация по меньшей мере одного из первого и второго наборов параметров управления может включать использование системы получения изображений, просмотр диапазона значений параметра управления из набора из первого и второго наборов параметров управления, измерение устойчивости сервосхемы в ходе указанного просмотра и выбор значения указанного параметра управления. Оптимизация по меньшей мере одного из первого и второго наборов параметров управления может включать использование системы получения изображений, просмотр диапазона значений множества параметров управления из набора из первого и второго наборов параметров управления, измерение устойчивости сервосхемы в ходе указанного просмотра и определение оптимальных значений для указанного множества параметров управления.
В некоторых реализациях системой получения изображений может быть секвенирующее устройство, первым режимом работы может быть режим формирования модели фокуса, а вторым режимом работы может быть режим секвенирования. Схема сервоуправления дополнительно может быть выполнена с возможностью включения обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в сканирующем режиме и с возможностью выключения обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в режиме формирования модели фокуса.
В еще одном примере система получения изображений может содержать: предметный столик, содержащий поверхность для установки образца, подлежащего сканированию системой получения изображений; оптический столик, содержащий объектив и выполненный с возможностью изменения положения относительно предметного столика; схему автоподстройки фокуса, соединенную с оптическим столиком; исполнительное устройство, физически соединенное по меньшей мере с одним из предметного столика и оптического столика для перемещения предметного столика относительно оптического столика на основании информации из схемы автоподстройки фокуса; сервосхему для управления указанным исполнительным устройством; и схему сервоуправления для включения обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в сканирующем режиме работы и для выключения обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в режиме формирования модели фокуса.
Способ сервоуправления в системе получения изображений может включать: в ходе работы системы получения изображений, распознавание схемой распознавания режима того, в каком режиме работает система получения изображений - сканирующем режиме или режиме формирования модели фокуса; посредством сервосхемы, управление движением оптического столика относительно предметного столика в системе получения изображений; и посредством схемы сервоуправления, включение обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в сканирующем режиме работы и выключение обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в режиме формирования модели фокуса.
Другие отличительные признаки и аспекты раскрытой технологии должны стать очевидными из следующего подробного описания при его рассмотрении совместно с сопровождающими чертежами, которые посредством примера иллюстрируют эти отличительные признаки в соответствии с реализациями раскрытой технологии. Настоящее краткое раскрытие не предназначено для ограничения объема любых изобретений, описанных в настоящем документе, которые определены пунктами формулы и эквивалентами.
Следует понимать, что все комбинации вышеизложенных концепций (при условии отсутствия их взаимной несовместимости) считаются частью изобретательского предмета, раскрытого в настоящем документе. Конкретнее, все комбинации заявленного объекта изобретения, представленного в конце настоящего раскрытия, считаются частью объекта изобретения, раскрытого в настоящем документе.
Краткое описание чертежей
Технология, раскрытая в настоящем документе, в соответствии с одним или более примерами подробно описывается со ссылкой на следующие чертежи. Эти чертежи приведены, чтобы облегчить читателю понимание раскрываемой технологии, и не предназначены для того, чтобы быть исчерпывающими или ограничивать настоящее раскрытие конкретно раскрытыми формами. Более того, чертежи на фигурах представлены лишь с целью пояснения и изображают лишь типовые или примерные примеры раскрытой технологии. Кроме того, следует отметить, что для ясности и упрощения пояснения элементы на чертежах не обязательно изображены с соблюдением масштаба.
Фиг. 1 представляет пример сервосистемы, которая может быть использована для управления исполнительным устройством.
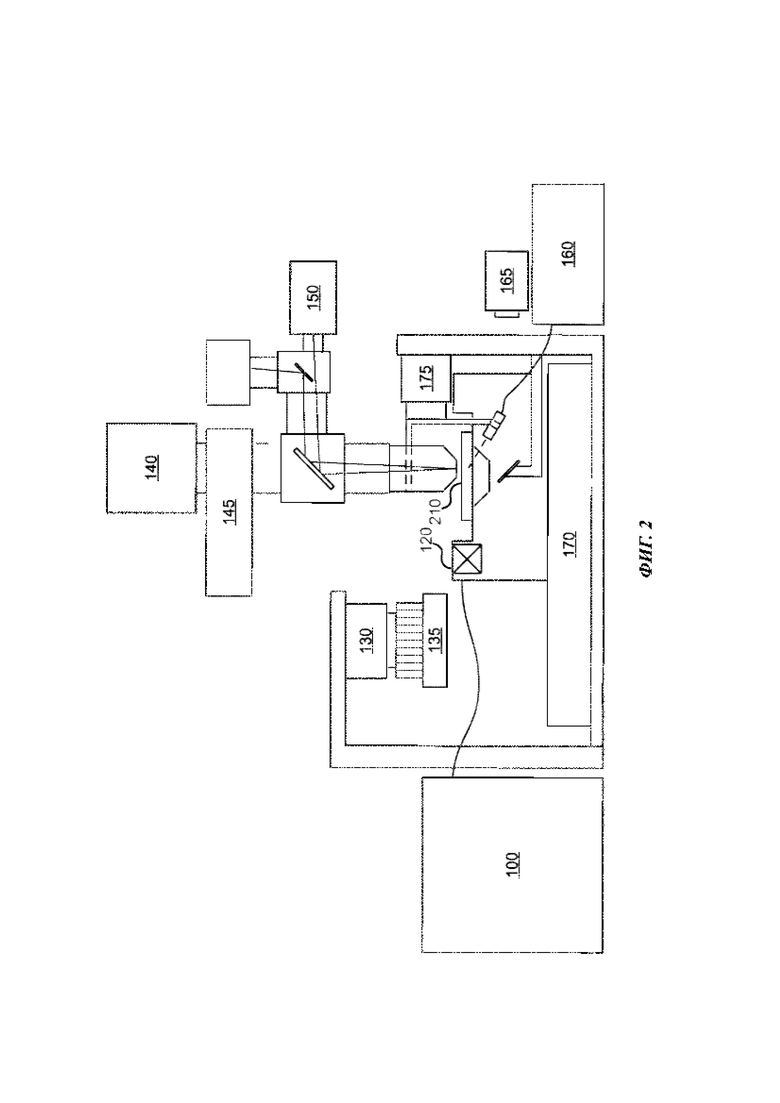
Фиг. 2 представляет упрощенную функциональную схему одного примера системы сканирования изображения, с использованием которой могут быть реализованы системы и способы, раскрытые в настоящем документе.
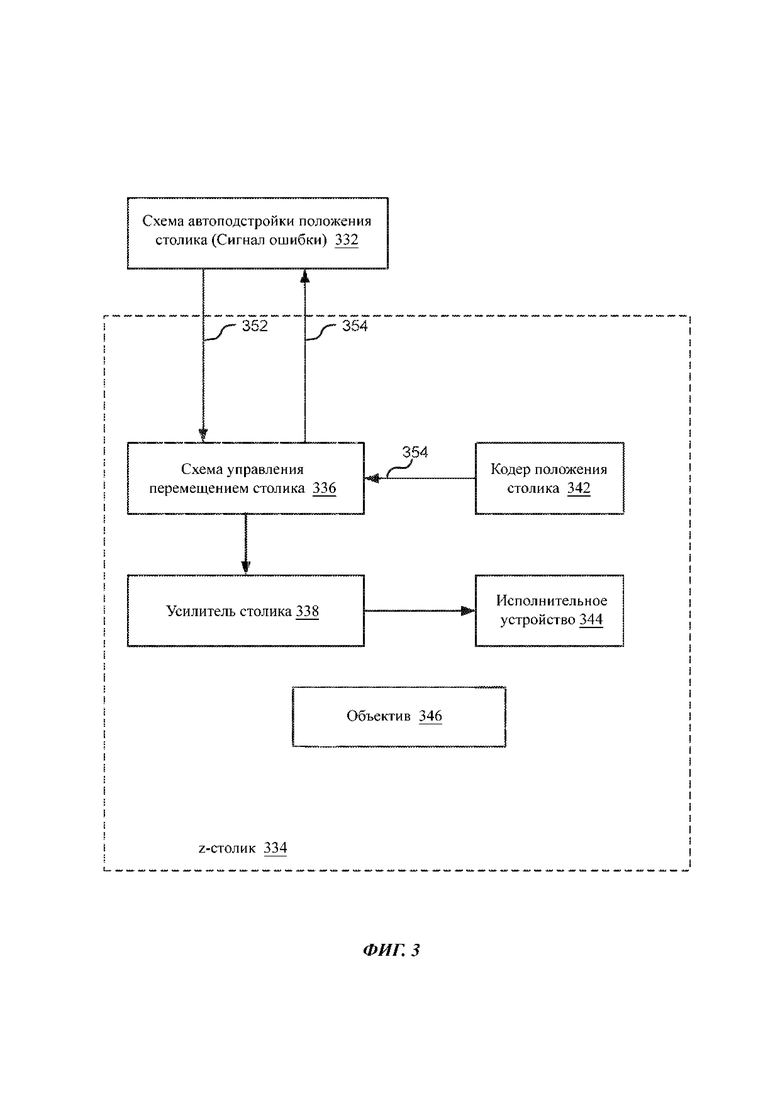
Фиг. 3 представляет функциональную схему примерной системы управления фокусировкой для операций фокусировки в соответствии с одним примером систем и способов, описанных в настоящем документе.
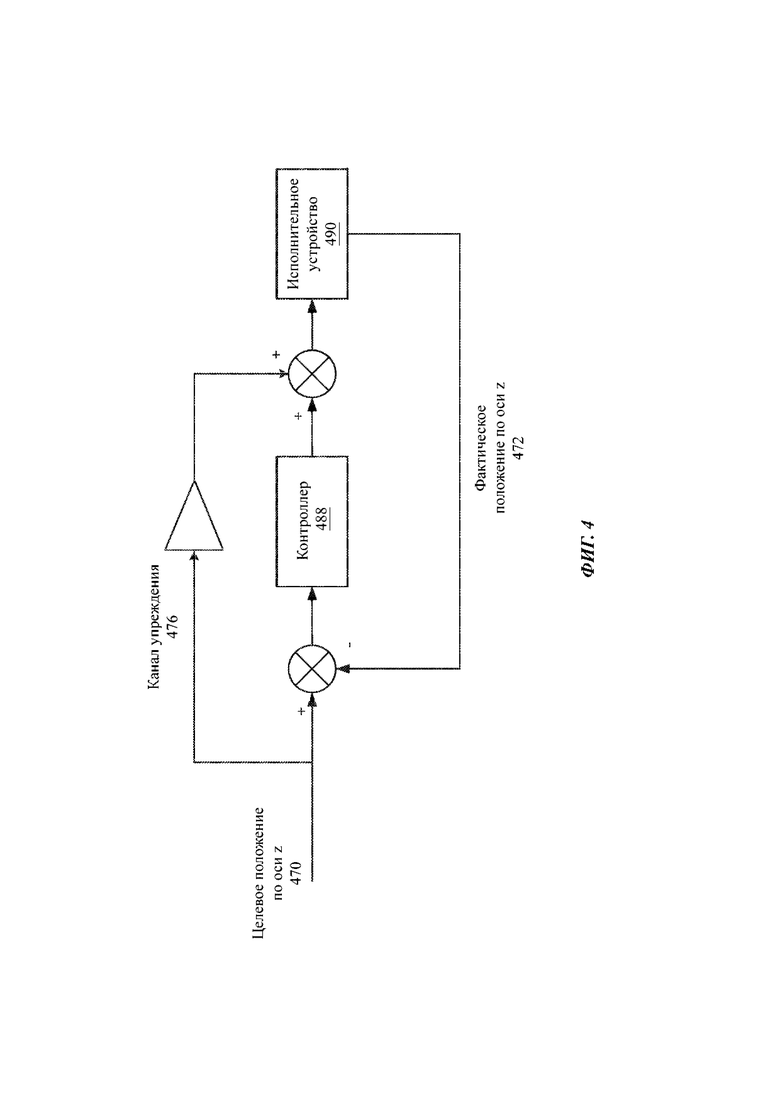
Фиг. 4 представляет схему примерной архитектуры для контроллера z-столика в соответствии с одним примером систем и способов, описанных в настоящем документе.
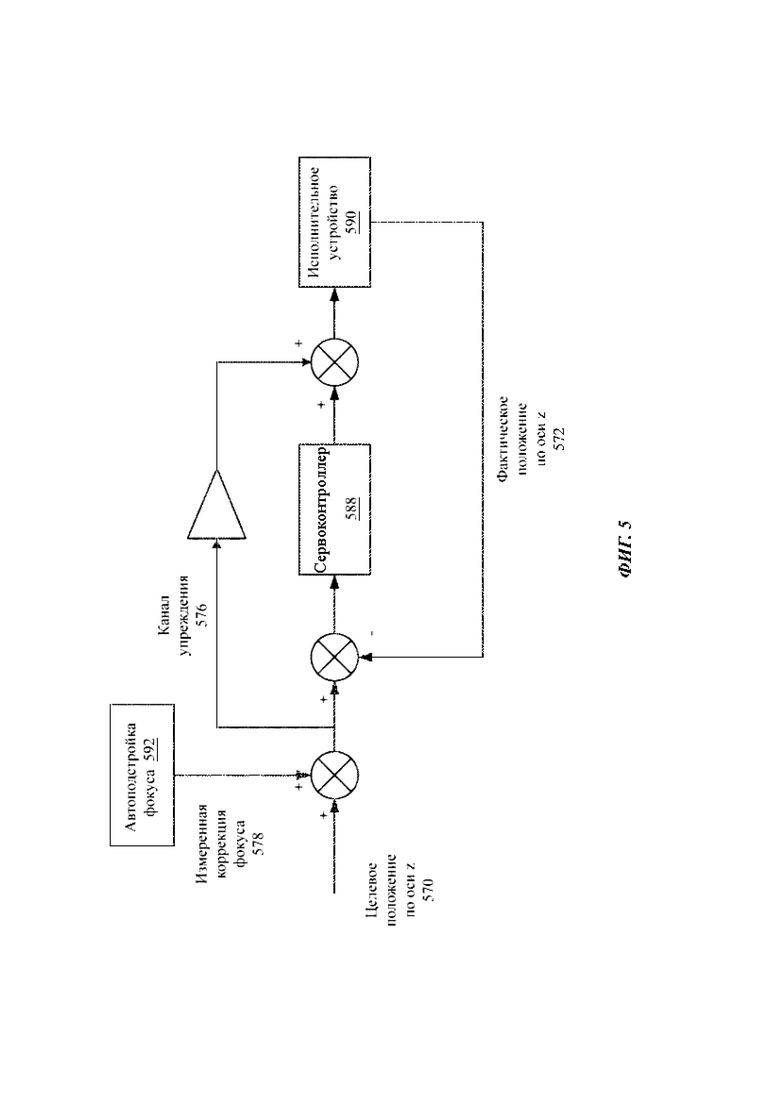
Фиг. 5 представляет схему еще одной примерной архитектуры для контроллера z-столика в соответствии с одним примером систем и способов, описанных в настоящем документе.
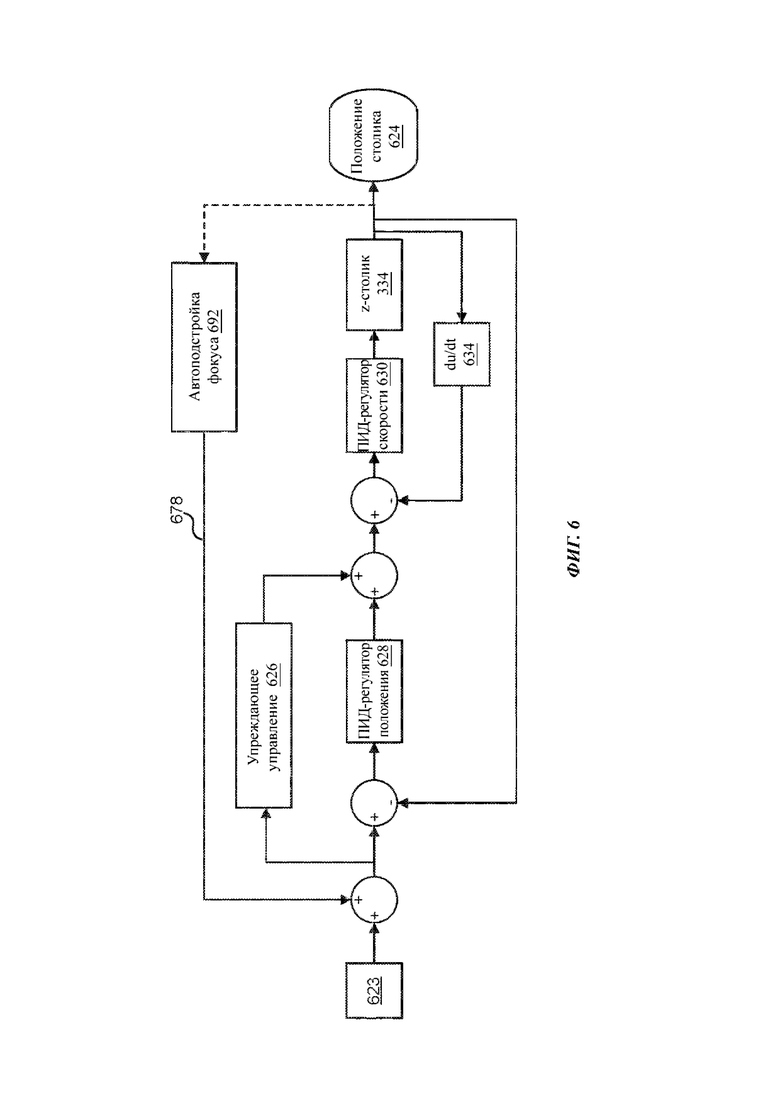
Фиг. 6 представляет схему еще одного примерного контроллера, использующего управление с обратной связью и с упреждающей связью, со входом автоподстройки фокуса, в соответствии с одним примером систем и способов, описанных в настоящем документе.
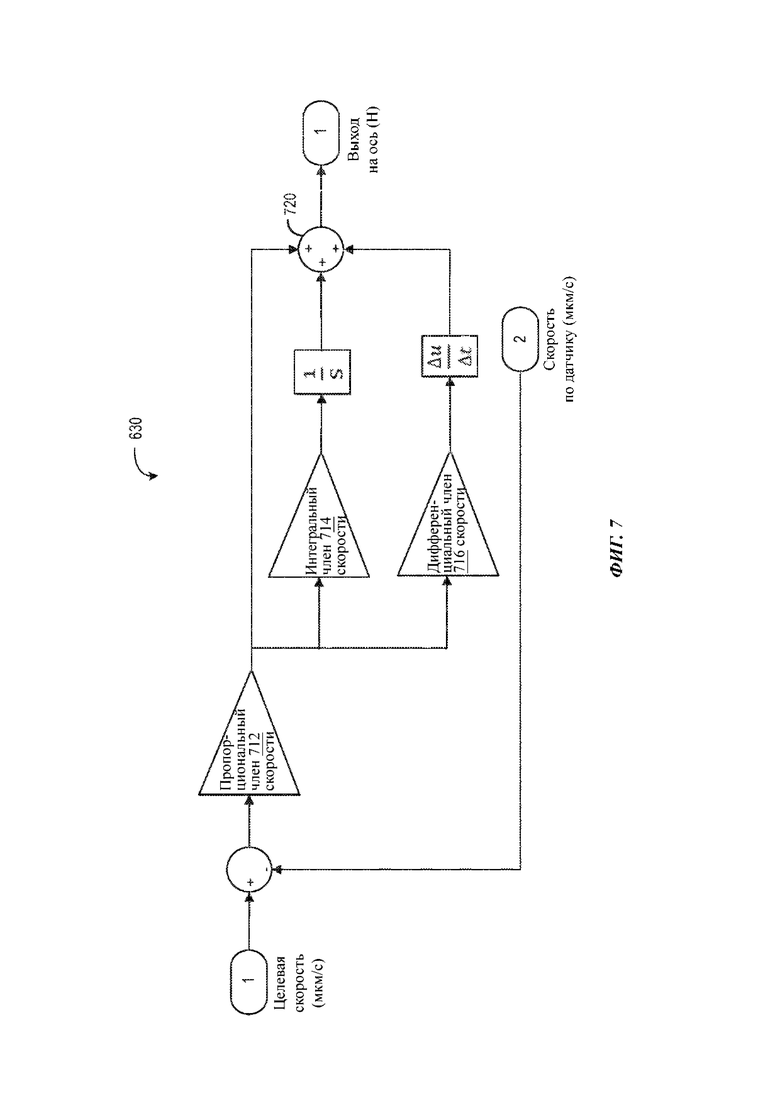
Фиг. 7 представляет схему регулятора скорости в соответствии с одним примером систем и способов, описанных в настоящем документе.
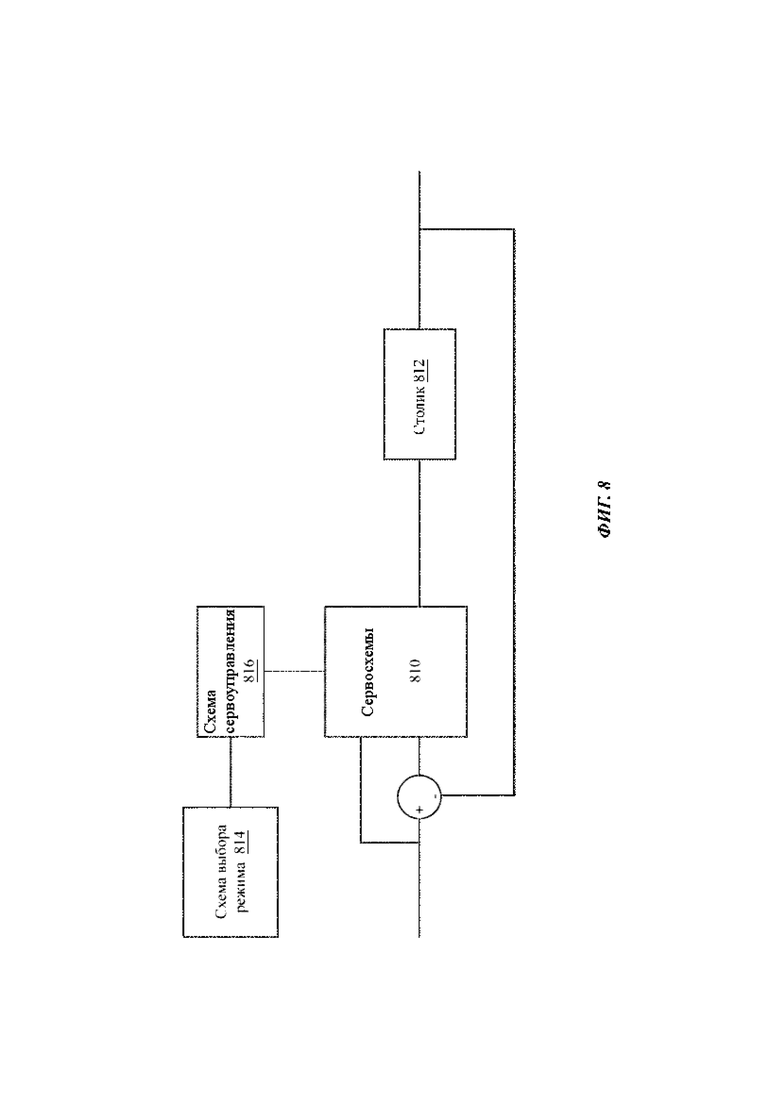
Фиг. 8 представляет схему примерной реализации переключения контроллера в соответствии с одной реализацией систем и способов, описанных в настоящем документе.
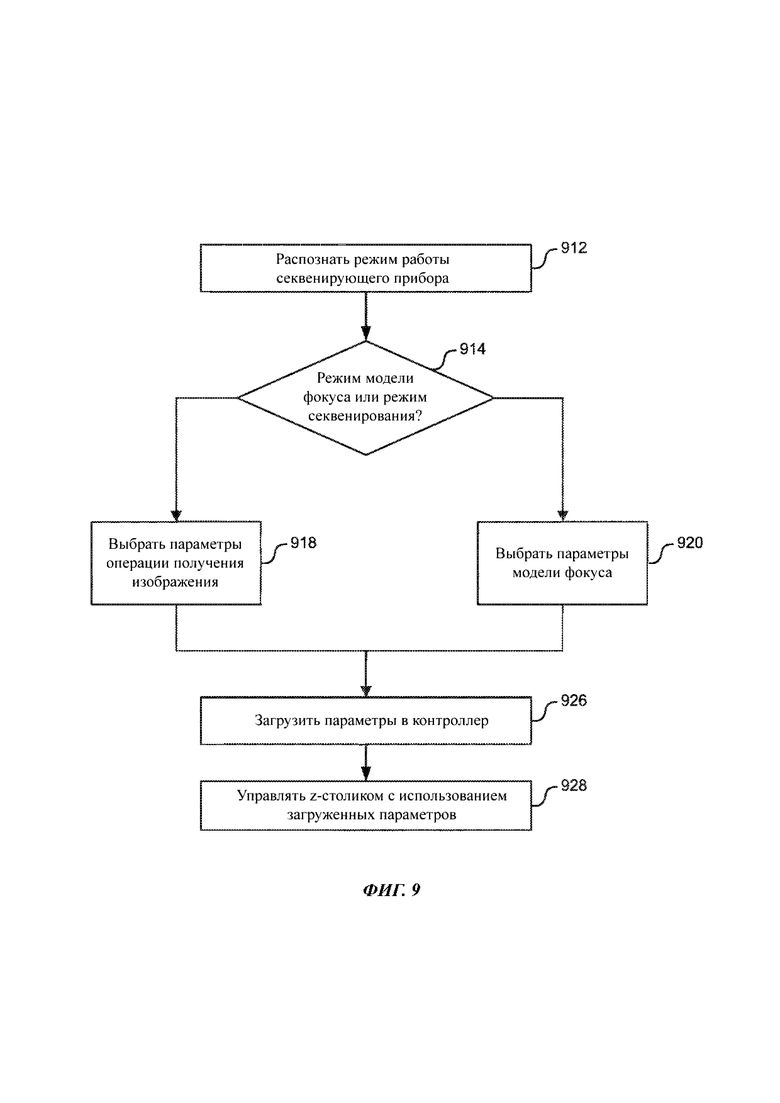
Фиг. 9 иллюстрирует операцию переключения конфигурации сервоконтроллера в соответствии с одной реализацией систем и способов, описанных в настоящем документе.
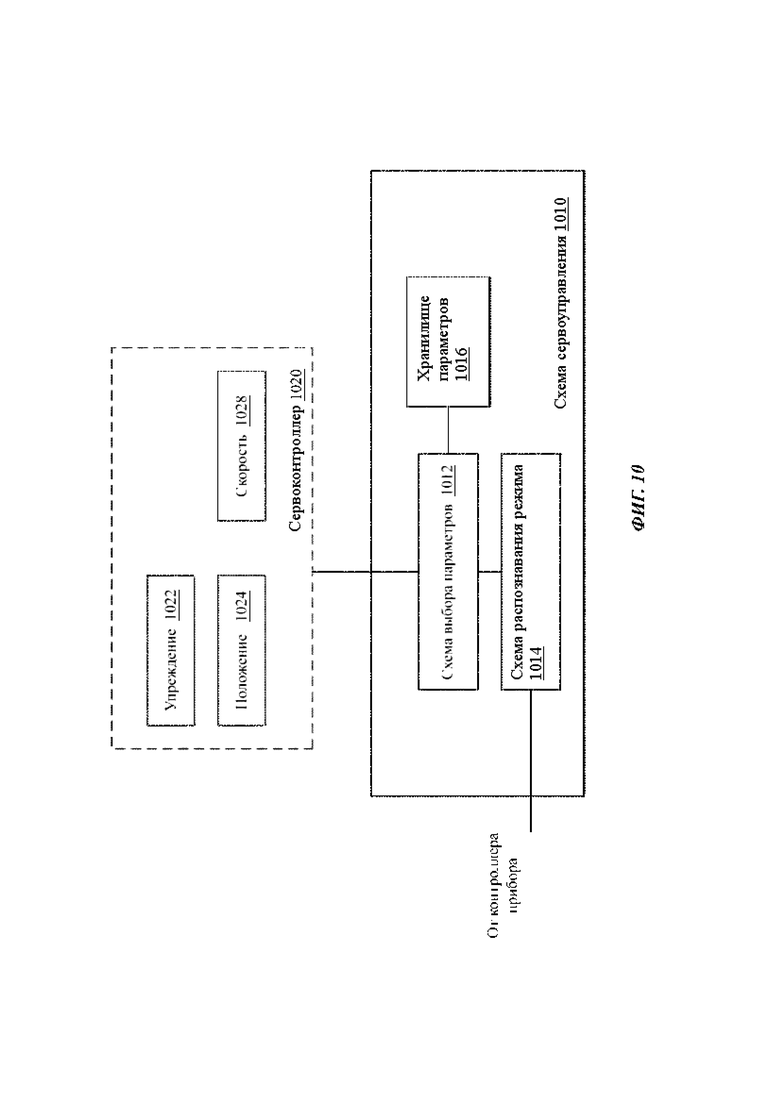
Фиг. 10 представляет схему примерной реализации схемы сервоуправления в соответствии с одной реализацией систем и способов, описанных в настоящем документе.
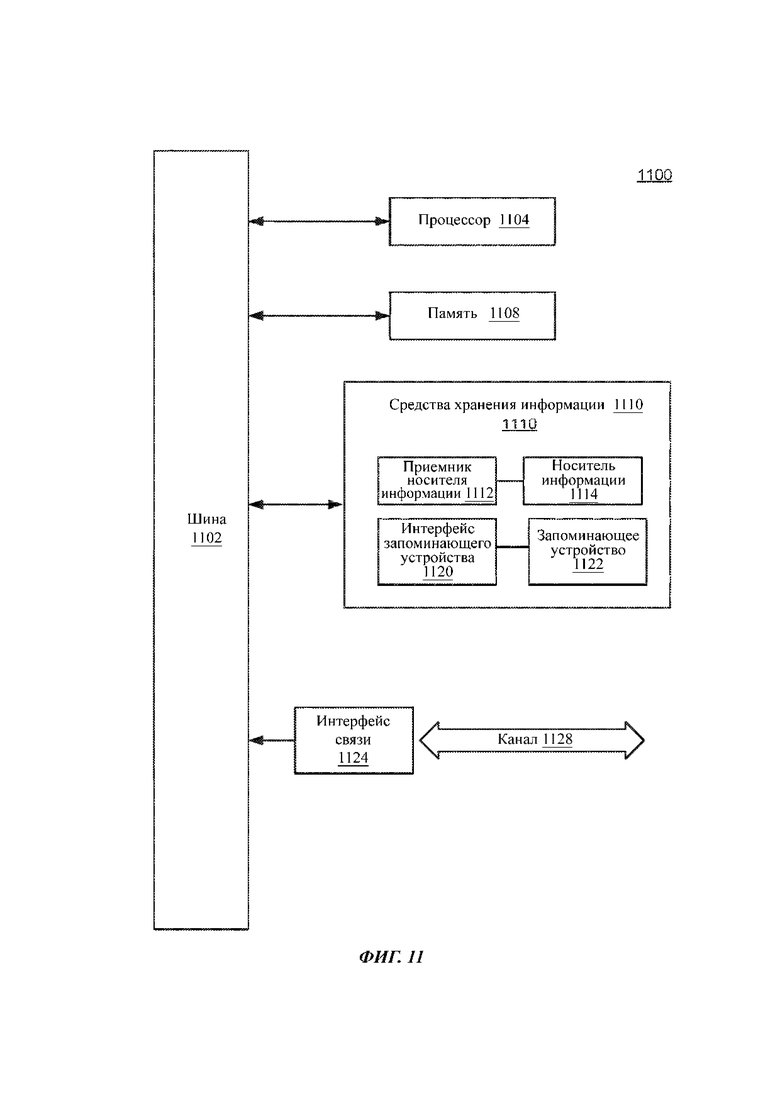
Фиг. 11 представляет примерную схему, которая может использоваться для реализации различных компонентов раскрытой технологии.
Должно быть понятно, что раскрытая технология может быть применена с изменениями и модификациями, и что раскрытая технология ограничивается лишь формулой изобретения и ее эквивалентами.
Осуществление изобретения
Различные примеры технологий, раскрытых в настоящем документе, представляют системы и способы для задания в реальном времени рабочих параметров системы сервоуправления, используемой в оптической системе получения изображений, например, в секвенирующей системе. Многие системы получения изображений содержат предметный столик, удерживающий образец или иной объект, изображение которого получают, и оптический столик, содержащий оптику, используемую в операциях получения изображений. Операции фокусировки содержат перемещение оптического столика относительно предметного столика с использованием исполнительного устройства, выполняющего указанное перемещение. Эти системы получения изображений могут работать в разных режимах работы, и в разных режимах работы от исполнительного устройства могут требоваться разные режимы запуска. Например, режим работы, в котором формируют модель фокуса, может требовать удержания предметного столика в неизменном положении относительно оптического столика на время получения информации о фокусировке, тогда как в операциях секвенирования для высокой производительности могут требоваться быстрые изменения фокусировки. В некоторых реализациях системы и способы, раскрытые в настоящем документе, могут во время работы системы получения изображений обеспечивать возможность определения режима работы системы получения изображений и возможность регулировки работы сервосистемы, управляющей исполнительным устройством, с целью оптимизации сервоуправления для данного режима работы. Это может включать, например, регулировку рабочих параметров сервосистемы, например, значений коэффициентов передачи и значений фильтров. В качестве еще одного примера, это может содержать смену контура обратной связи в сервосистеме.
Соответственно, могут заранее определять и сохранять для последующего использования в работе системы наборы параметров сервосистемы, оптимизированные для различных режимов работы. В ходе выполнения операций система может распознавать режим работы, находить параметры сервосистемы, оптимизированные для распознанного режима работы, и применять эти параметры к сервосистеме, в результате чего управление исполнительным устройством оптимизируется для данного режима. Это может выполняться в реальном времени в ходе операций получения изображений, при этом загрузка параметров при изменении режима может выполняться без остановки системы получения изображений. Подобным образом, для разных режимов работы могут быть определены разные схемы обратной связи, которые тоже могут выбираться для оптимизации характера обратной связи в сервоконтроллере. Этот выбор тоже может выполняться в реальном времени, и для изменений в сервосистеме остановка системы получения изображений также не требуется.
Перед подробным описанием примерных систем и способов полезно описать пример конфигурации, в которой эти системы и способы могут быть реализованы. Одной такой конфигурацией является система сканирования изображения, например, представленная на фиг. 2. Эта примерная сканирующая система для получения изображений может содержать устройство для получения или формирования изображения некоторой области. На фиг. 2 в качестве примера показана конфигурация для получения изображений в проходящем свете.
На фиг. 2 исследуемые образцы расположены на контейнере 210 образца, размещенном на предметном столике 170 под объективом. Источник 160 света и связанная с ним оптика направляет пучок света, например, лазерного излучения, на выбранное место в образце на контейнере 210 образца. Образец флуоресцирует, и испускаемый им свет собирается объективом и направляется на фотодетектор 140 для регистрации этой флуоресценции. Для помещения следующего места в образце на контейнере 210 образца в фокальное пятно объектива предметный столик 170 перемещают относительно объектива. Перемещение предметного столика 170 относительно объектива может быть реализовано путем перемещения самого предметного столика, объектива, всего оптического столика или любой комбинации вышеперечисленного. Дополнительные примеры могут содержать и перемещение всей системы получения изображений по неподвижному образцу.
Модуль или устройство 100 подачи текучей среды управляет течением реагентов (например, флуоресцентных нуклеотидов, буферов, энзимов, расщепляющих реагентов и т.д.) в (и через) контейнер 210 образца и сливной вентиль 120. В некоторых реализациях контейнер 210 образца может быть реализован как проточная ячейка, содержащая кластеры последовательностей нуклеиновой кислоты во множестве мест образца на контейнере 210 образца. Образцы, подлежащие секвенированию, а также другие необязательные компоненты, могут прикрепляться к подложке проточной ячейки.
Система также содержит исполнительное устройство 130 температурной станции и нагреватель/охладитель 135, выполненные с возможностью управления температурными параметрами текучих сред в контейнере 210 образца. В системе может содержаться съемочная система 140 для контроля и отслеживания секвенирования контейнера 210 образца. Съемочная система 140 может быть реализована, например, в виде камеры на приборе с зарядовой связью (ПЗС), которая может взаимодействовать с различными фильтрами в узле 145 переключения фильтра, объективом и лазером фокусировки/узлом 150 лазера фокусировки. Съемочная система 140 не ограничена камерой на ПЗС, и могут быть использованы камеры и датчики изображения других типов.
В системе может содержаться источник 160 света (например, возбуждающий лазер в узле, который может содержать несколько лазеров, или иной источник света) для подсветки флуоресцентных реакций секвенирования в образцах путем направления света через волоконно-оптический интерфейс (который, в качестве одной из возможностей, может содержать одну или более проекционных линз, держатель оптического волокна и т.д.). Также в представленном примере показаны низковаттная лампа 165, лазер 150 фокусировки и обратный дихроичный фильтр. В некоторых реализациях лазер 150 фокусировки в ходе получения изображений могут выключать. В других реализациях может использоваться альтернативная конфигурация фокусировки, содержащая вторую фокусирующую камеру (не показана), которой может быть квадрантный детектор, позиционно-чувствительный детектор или аналогичный детектор для измерения положения луча, отраженного с рассеянием от поверхности в ходе сбора данных.
Хотя на чертеже показано устройство для работы в проходящем свете, в других примерах может использоваться свет лазера или иного источника света, пропускаемого через объектив на образцы на контейнере 210 образца. Контейнер 210 образца в итоге могут устанавливать на предметный столик 170 для создания возможности движения контейнера 210 образца относительно объектива и их совмещения. Предметный столик может содержать одно или более исполнительных устройств, обеспечивающих возможность перемещения предметного столика в любом из трех направлений. Например, исполнительные устройства могут обеспечивать возможность перемещения столика относительно объектива в направлениях х, у и z декартовой системы координат. Это дает возможность оптического совмещения одного или более мест образца на контейнере 210 образца с объективом.
В данном примере для управления положением оптических компонентов относительно контейнера 210 образца в направлении фокусировки (обычно называемом осью z или направлением z) используется фокусирующий (z-осевой) компонент 175. Фокусирующий компонент 175 может содержать одно или более исполнительных устройств, физически соединенных с оптическим столиком, предметным столиком или ими обоими, для перемещения контейнера 210 образца, установленного на предметном столике 170, относительно оптических компонентов (например, объектива) с целью надлежащей фокусировки для операций получения изображений. Исполнительное устройство может быть физически соединено с соответствующим столиком посредством, например, механической, магнитной, гидравлической или иной непосредственной или опосредованной связи или контакта. Указанные одно или более исполнительных устройств могут быть выполнены с возможностью перемещения столика в направлении z с сохранением положения предметного столика в той же плоскости (например, поддержания постоянного уровня или горизонтальной позиции, перпендикулярной указанной оптической оси). Указанные одно или более исполнительных устройств могут быть выполнены с возможностью наклона столика. Наклон столика может применяться, например, для динамического выравнивания уровня контейнера 210 образца с целью компенсации какого-либо наклона на его поверхностях.
Под фокусировкой системы обычно понимают совмещение фокальной плоскости объектива с образцом, изображение которого хотят получить, в выбранном месте образца. Однако под фокусировкой также могут понимать регулировку системы с целью получения требуемой характеристики представления образца, например, требуемого уровня резкости или контрастности на изображении исследуемого образца. Поскольку рабочая глубина резкости в фокальной плоскости объектива может быть очень малой (иногда порядка 1 мкм и менее), фокусирующий компонент 175 с высокой точностью отслеживает поверхность, изображение которой получают. Поскольку контейнер образца, установленный на прибор, не идеально плоский, фокусирующий компонент 175 может быть настроен так, чтобы следовать этому профилю при движении по направлению сканирования (называемом обычно осью у).
Свет от места в исследуемом образце, изображение которого получают, могут направлять на один или более детекторов 140. Детекторы могут содержать, например, камеру на ПЗС. Чтобы в детектор попадал только свет от зоны фокуса, могут устанавливать диафрагму. Диафрагма, отсекая компоненты света, исходящие из зон за пределами зоны фокуса, может повышать качество изображения. В узле 145 переключения фильтра могут содержаться фильтры излучения, которые можно выбирать для регистрации излучения с определенной длиной волны и отсечения рассеянного лазерного излучения.
В различных примерах контейнер 210 образца может содержать одну или более подложек, на которых размещены образцы. Например, в системе для анализа большого количества разных последовательностей нуклеиновой кислоты контейнер 210 образца может содержать одну или более подложек, на которой могут быть связаны, присоединены или ассоциированы нуклеиновые кислоты, подлежащие секвенированию. В различных примерах подложкой может быть любая инертная подложка или матрица, к которой возможно присоединение нуклеиновых кислот, например, стеклянные поверхности, поверхности из пластических масс, латекса, декстрана, полистирола, полипропилена, золота, полиакриламидные гели и кремниевые пластины. В некоторых реализациях подложка помещена в канал или другую область во множестве местоположений, распределенных в виде матрицы или сетки по контейнеру 210 образца.
Для управления функционированием сканирующей системы, например, примерной сканирующей системы, описанной выше со ссылкой на фиг. 2, могут быть предусмотрены один или более контроллеров (не показаны). Этот контроллер может использоваться для управления аспектами функционирования системы, например, фокусировкой, перемещением столика и получением изображений. В различных реализациях этот контроллер может быть реализован с использованием аппаратных средств, программных средств или их комбинации. Например, в некоторых реализациях контроллер может содержать одно или более центральных процессорных устройств (ЦПУ) или процессоров с соответствующей памятью. В качестве еще одного примера, контроллер может содержать аппаратные средства или иную схему для управления указанным функционированием. Например, эта схема может содержать один или более из следующих элементов: программируемую матрицу логических элементов (англ. Field Programmable Gate Array, FPGA), специализированную интегральную схему (англ. Application Specific Integrated Circuit, ASIC), программируемое логическое устройство (англ. Programmable Logic Device, PLD), программируемую логическую интегральную схему (англ. Complex Programmable Logic Device, CPLD), программируемую логическую матрицу (англ. Programmable Logic Array, PLA), программируемую матричную логику (англ. Programmable Array Logic, PAL) или иное аналогичное обрабатывающее устройство или схему. В еще одном примере контроллер может содержать комбинацию этой схемы с одним или более процессоров.
Несмотря на то, что системы и способы в настоящем документе иногда могут описываться в контексте этой примерной системы, это лишь один пример, с использованием которого могут быть реализованы указанные системы и способы.
После прочтения настоящего раскрытия специалисту обычного уровня в данной области техники должно стать понятно, как системы и способы, описанные в настоящем документе, могут быть реализованы с использованием этого и других сканеров, микроскопов и других систем получения изображений.
Как проиллюстрировано примером, описанном выше со ссылкой на фиг. 2, операции фокусировки могут быть важной частью процесса получения изображений. В некоторых реализациях для операции получения изображений могут подготавливать модель фокуса, которая затем может использоваться для надлежащего размещения объектива относительно образцов в ходе операций получения изображений. Как правило, в ходе работы фокусировочный пучок, сформированный лазером фокусировки, для измерения требуемого фокуса отражается от определенного места образца, после чего предметный столик перемещают относительно оптического столика так, чтобы сфокусировать оптический столик на это место образца.
Перемещение предметного столика относительно оптического столика для формирования модели фокуса и для установки в положение надлежащей фокусировки в ходе получения изображений обычно называют перемещением по оси z или по направлению z. Термины «ось z» и «направление z» используются здесь в значении, устоявшемся в области микроскопии и систем получения изображений, где под осью z понимается фокальный отрезок. Соответственно, линейное перемещение по оси z приводит к увеличению или уменьшению длины фокального отрезка. Линейное перемещение по оси z может быть реализовано, например, путем перемещения предметного столика относительно оптического столика (например, путем перемещения предметного столика, или оптического элемента, или их обоих). Таким образом, линейное перемещение по оси z может быть реализовано путем изменения положения объектива, оптического столика, предметного столика или комбинации перечисленных элементов, при этом перемещение любого из них может осуществляться путем приведения в действие одного или более сервоприводов, моторов или других исполнительных устройств, находящихся в функциональной связи с объективом, с предметным столиком или с ними обоими. В различных примерах исполнительные устройства могут быть выполнены с возможностью наклона предметного столика относительно оптического столика для, например, эффективного выравнивания контейнера образца в плоскости, перпендикулярной оптической оси получения изображений. Использование такого динамического управления наклоном для оперативного выравнивания мест образцов на контейнере образца дает возможность перемещения контейнера образца в направлениях χ и у для сканирования с небольшим перемещением по оси z или вообще без него. Хотя в настоящем раскрытии используются термины «ось z» и «направление», следует понимать, что это сделано для ясности описания и соответствия общепринятой терминологии. Принципы, раскрытые в настоящем документе, не зависят от этих обозначений, и для описания движения в направлениях х, у и z может быть использована другая терминология.
В различных примерах для реализации требуемой настройки фокуса исполнительное устройство может выполнять перемещение предметного столика относительно оптического столика путем изменения положения предметного столика, оптического столика (или их частей). В некоторых примерах для перемещения требуемого столика могут использоваться пьезоэлектрические исполнительные устройства. В других примерах для перемещения требуемого столика может использоваться исполнительное устройство на основе звуковой катушки. В некоторых реализациях использование исполнительного устройства на основе звуковой катушки может снизить задержку фокусировки по сравнению с пьезоэлектрическими аналогами. При использовании исполнительного устройства на основе звуковой катушки размер катушки может выбираться минимально необходимым для обеспечения требуемого перемещения, чтобы также минимизировать индуктивность катушки. Ограничение размера катушки и, соответственно, ее индуктивности, снижает время реакции и рабочее напряжение исполнительного устройства.
При формировании модели фокуса часто требуется обеспечить минимально возможное движение оптической системы на время определения фокуса в данном месте образца. Например, в некоторых реализациях может требоваться удержание объектива относительно контейнера образца с отклонением от целевого положения не более нескольких нанометров. Напротив, в операциях получения изображений нужно относительно быстро сканировать кластеры ДНК на поверхности контейнера образца. Скорость сканирования при получении изображения зависит от временных характеристик прибора и определяет требования к ширине полосы пропускания фокусирующей системы и z-столика. Как правило, это означает, что для возможности получения высококачественных изображений с большой производительностью управляющая система должна обладать широкой полосой пропускания, что требует быстрого перемещения объектива относительно контейнера образца в положение точной фокусировки. Но это противоречит требованиям к управляющей системе при формировании модели фокуса, когда целью может быть удержание оптической системы в нужном месте в состоянии, наиболее близком к неподвижному. Раскрытая в настоящем документе технология может быть применена для переключения в реальном времени контроллера z-столика в зависимости от текущего рабочего режима. Эта технология, дающая возможность использования первой управляющей системы, оптимизированной для реализации неподвижного состояния, и второй управляющей системы, оптимизированной для быстрого получения изображений, и предусматривающая механизм переключения между этими системами управления в зависимости от текущего режима, может быть использована для преодоления ограничений, обусловленных необходимостью компромисса между неподвижностью при формировании модели фокуса и высокоскоростным движением при получении изображения.
Фиг. 3 представляет функциональную схему примерной системы управления фокусировкой для операций фокусировки в соответствии с одной реализации систем и способов, описанных в настоящем документе. Эта примерная система управления фокусировкой содержит схему 332 автоподстройки фокуса, выполненную с возможностью определения текущих настроек фокуса, используемых для формирования управляющего сигнала, управляющего контуром обратной связи автоподстройки фокуса в z-столике 334. Как показано в примере согласно фиг. 3, команды 352 на основе разности настроек фокуса передаются в z-столик 334 для управления перемещением z-столика 334.
В данном примере z-столик 334 выполнен с возможностью перемещения объектива 346 (например, объектива). Исполнительное устройство 344 выполнено с возможностью перемещения оптического столика, и, конкретнее, объектива 346, в ответ на управляющий сигнал, формируемый усилителем 338 z-столика. Как отмечалось выше, исполнительное устройство 344 может содержать пьезоэлектрическое исполнительное устройство, исполнительное устройство на основе звуковой катушки, мотор или другие аналогичные исполнительные устройства. Кодер 342 положения формирует информацию о положении и движении исполнительного устройства. Эта информация 354 кодера через контроллер 336 z-столика может передаваться обратно в схему 332 автоподстройки фокуса и может использоваться в определении сигнала ошибки.
Контроллеры, используемые для управления перемещением, могут быть реализованы с использованием ПИД-регулятора с упреждением, содержащего регуляторы как для положения, так и для скорости. Эти регуляторы могут быть выполнены с возможностью пропорционального, интегрирующего и дифференцирующего управления для ветвей как управления по сигналу ошибки, так и упреждающего управления. Некоторые примеры также могут содержать дополнительные фильтры и формирование траектории, что может использоваться для улучшения устойчивости системы в зависимости от конкретного применения.
Фиг. 4 представляет схему примерной архитектуры для контроллера z-столика в соответствии с одним примером систем и способов, описанных в настоящем документе. В этом примерном контроллере для формирования управляющего сигнала для управления исполнительным устройством столика используется и упреждение, и управление с обратной связью. В некоторых примерах это может быть реализовано как пропорциональное, интегрирующее и дифференцирующее (ПИД) управление для ветви сигнала ошибки и/или для ветви упреждающего управления управляющей системы. Как показано в этом примере, вычисляется и передается в блок 488 управления разность между целевой настройкой фокуса и фактической настройкой фокуса. Информация положения также передается через канал 476 упреждения и суммируется с выходным сигналом блока 488 управления. Этот выходной сигнал из управляющей схемы в блоке 488 управления создает управляющий выходной сигнал, который используется для управления исполнительным устройством 490. Как показано, величина разности между целевым положением 470 фокуса и фактическим положением 472 передается через канал 476 упреждения для коррекции управляющего выходного сигнала.
Фиг. 5 представляет схему еще одной примерной архитектуры для контроллера z-столика в соответствии с одним примером систем и способов, описанных в настоящем документе. Этот пример тоже содержит обратную связь и упреждающее управление. При работе для задания положения столика используется целевая настройка фокуса (например, целевое положение 570 по оси z). Целевое положение 570 по оси z передается в се ρ во контроллер 588, который определяет управляющий сигнал, требуемый для того, чтобы обеспечить позиционирование столика исполнительным устройством 590. Сервоконтроллер 588 также может содержать управляющую схему для формирования управляющего сигнала. Определение этого управляющего сигнала выполняют с использованием величины разности между целевой настройкой фокуса (целевым положением 570 по оси z) и текущей настройкой фокуса (фактическим положением 572 по оси z), которая может предоставляться, например, исполнительным устройством 590. В этом примере и в предыдущем примере управляющий сигнал, используемый для управления исполнительным устройством, корректируется сигналом из канала 576 упреждающего управления.
Однако в примере согласно фиг. 5 дополнительно схемой 592 автоподстройки фокуса формируется измеренный сигнал 578 коррекции фокусировки, который может быть активным, например, в сканирующем режиме. В этом случае может определяться информация коррекции, например, с использованием измеренной информации коррекции фокусировки. Информация коррекции в данном примере добавляется к заданному положению столика для коррекции управляющего сигнала в соответствии с наклоном изменения настройки фокуса для сканирующих операций. Например, этот канал обратной связи могут включать или разрешать, когда система получения изображений находится в сканирующем режиме, чтобы передавать эту информацию коррекции в сервоконтроллер. В некоторых реализациях системой могут управлять так, чтобы при работе системы в сканирующем режиме контур положения сервоконтроллера размыкался или частично размыкался, поскольку схема 592 автоподстройки фокуса обеспечивает обратную связь в реальном времени по отношению к подвижной мишени.
Фиг. 6 представляет схему еще одного примера сервоконтроллера, использующего управление с обратной связью и с упреждающей связью, со входом автоподстройки фокуса, в соответствии с одним примером систем и способов, описанных в настоящем документе. Целевое расстояние 623 получения изображения в качестве входной информации сообщается в управляющую систему для формирования сигнала 624 положения столика для управления z-столиком (например, z-столиком 334). Эта система также содержит упреждающее управление 626 в дополнение к управлению 628 по положению. Канал упреждения может обеспечить более быстрый отклик за счет обхода, как правило, более медленного контура положения непосредственно на контур скорости (описанный ниже). При значительном изменении положения канал упреждающей передачи упреждающего управления 626 передает это изменение на ПИД-регулятор 630 скорости для получения более быстрого отклика системы, чем отклик, который обычно можно получить при использовании лишь одного ПИД-регулятора 628 положения. Управление 630 скоростью, которое также может быть реализовано как ПИД-регулятор, в данном примере реализовано внутри контура положения. Обратная связь 634 для контура скорости представляется в форме производной положения, которое было определено. В некоторых случаях постоянная ошибка положения может быть настолько малой, что сам по себе ПИД-регулятор 628 положения не сможет создать достаточный крутящий момент для преодоления статического трения в системе. В таких случаях ПИД-регулятор 630 скорости обеспечивает дополнительное усиление для преодоления этого трения. Сила и скорость сдвинуты по фазе на 90 градусов, что дает возможность использования более высоких коэффициентов передачи для более качественного отслеживания профиля и поддержания постоянного положения.
Как и пример согласно фиг. 5, этот пример содержит обратную связь по измеренной величине коррекции фокусировки от схемы 692 автоподстройки фокуса. Как и в примере согласно фиг. 5, измеренный сигнал 678 коррекции фокусировки может формироваться схемой 692 автоподстройки фокуса. Эта информация коррекции в данном примере добавляется к заданному положению столика для коррекции управляющего сигнала в соответствии с наклоном изменения настройки фокуса для сканирующих операций. Как и в случае примера согласно фиг. 5, в некоторых реализациях системой могут управлять так, чтобы при работе системы в сканирующем режиме контур положения сервоконтроллера размыкался или частично размыкался, поскольку схема 592 автоподстройки фокуса обеспечивает обратную связь в реальном времени по отношению к подвижной мишени.
Фиг. 7 представляет схему регулятора скорости в соответствии с одним примером систем и способов, описанных в настоящем документе. Здесь показана одна примерная реализация ПИД-регулятора 630 скорости, которая может быть использована для реализации контура скорости в сервоконтроллере. Этот пример содержит усилительные каскады 712, 714, 716, соответствующие пропорциональному члену, интегральному члену и дифференциальному члену. Усиленные сигналы суммируются суммирующей схемой 720 для формирования управляющего выходного сигнала ПИД-регулятора 630 скорости.
Как отмечалось, различные реализации систем и способов, описанных в настоящем документе, могут быть использованы для реализации в реальном времени распознавания режима и переключения параметра управления с целью оптимизации управления сервосистемой или рабочих параметров на основании распознанного текущего режима работающего прибора. Например, в случае секвенирующего прибора, системы и способы, описанные в настоящем документе, могут быть использованы, чтобы распознавать, работает ли секвенирующий прибор в режиме модели фокуса или в режиме секвенирования, определять надлежащий набор рабочих параметров для сервоконтроллера z-столика, заданных в качестве подлежащих использованию для этого режима работы, и изменять параметры сервоконтроллера на конкретные параметры, заданные для этого режима работы. Для оптимизации следящей (т.е. серво) работы в распознанном режиме может быть задано и выбрано любое количество параметров сервоконтроллера. Например, для различных режимов работы могут быть заданы и в требуемом режиме работы применены разные наборы параметров, например коэффициенты передачи интегрирующего звена, коэффициенты передачи дифференцирующего звена, упреждающего канала, частоты среза фильтра и т.п.Например, чтобы обеспечить быструю реакцию и устранить помехи, в контурах могут быть реализованы высокие коэффициенты передачи. Однако высокие коэффициенты передачи в контурах также могут вызывать неустойчивость.
Таблица 1 представляет пример набора параметров, который может быть задан для режима удержания и для сканирующего режима в секвенирующем приборе.
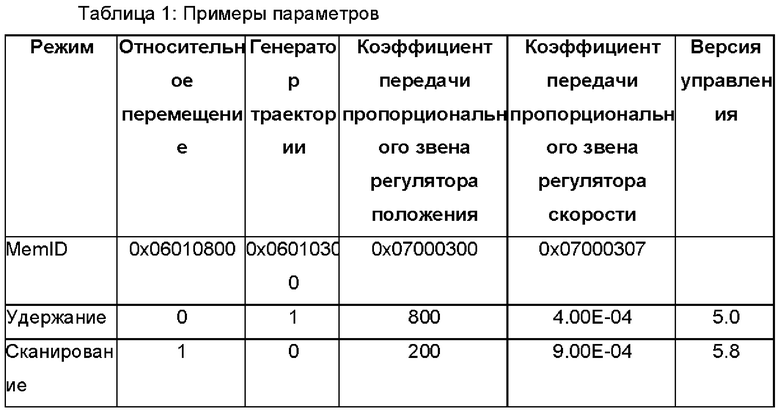
В данном примере для режима удержания и сканирующего режима предусмотрены заранее заданные значения коэффициента передачи контура положения и коэффициента передачи контура скорости. Реализация на основе относительного перемещения дает возможность снизить или минимизировать ошибку в текущем положении, поскольку местный контроллер обладает наиболее актуальными данными измерения положения исполнительного устройства столика, а снижение или минимизация задержки важны для сканирующих операций. Кроме того, во многих сканирующих операциях за основу берут только относительные перемещения. Реализация на основе генератора траектории, с другой стороны, полезна для формирования модели фокуса. Формирование модели фокуса и в основном опирается на знание абсолютного значения положения по оси z для калибровки фокусирующей системы. Однако для калибровки фокуса задержка, как правило, не так важна, и можно использовать абсолютное позиционирование. Соответственно, в примере, представленном в таблице 1, коэффициенты передачи контура положения для операций удержания относительно выше, чем для сканирующих операций, тогда как для контура скорости могут быть заданы более низкие коэффициенты передачи, чем для сканирующих операций. Пример из таблицы 1 представляет не все параметры, которые могут корректироваться, и системы и способы, раскрытые в настоящем документе, могут быть распространены на заранее заданные дополнительные параметры сервосистемы фокусировки.
Фиг. 8 представляет схему примерной реализации переключения контроллера в соответствии с одной реализацией систем и способов, описанных в настоящем документе. Представленный пример содержит схему 814 выбора режима и схему 816 сервоуправления, которая может использоваться для управления или регулировки рабочих параметров, или механизма обратной связи, или комбинации перечисленного у одного или более сервоконтроллеров 810, управляющих движением столика 812. Схема 814 выбора режима может использоваться в секвенирующем приборе (или в другом приборе, где возможно использование данных систем и способов) для выбора рабочего режима, в том числе для выбора рабочих параметров и механизмов обратной связи для сервоконтроллера. Например, в примерном сценарии с использованием сканирующего режима и режима формирования модели фокуса схема 814 выбора режима может использоваться для перевода секвенирующего прибора в какой-либо из этих режимов на основании текущей операции системы получения изображений. Схема 814 выбора режима может представлять собой независимую схему или может быть частью контроллера, используемого для управления функционированием сканирующей системы (например, контроллера, описанного выше со ссылкой на фиг. 1).
Информация, относящаяся к рабочему режиму системы, передается в схему 816 сервоуправления. Схема 816 сервоуправления выполнена с возможностью распознавания рабочего режима прибора и выбора надлежащих параметров сервоконтроллера или режима обратной связи (или и того, и другого) на основании рабочего режима системы. Схема 816 сервоуправления может быть также выполнена с возможностью установки значений изменяемых параметров для одного или более сервоконтуров, образующих сервосхемы 810. В случае выбора надлежащих параметров сервоконтроллера эти параметры могут быть сохранены в регистрах или иной памяти, и на основании рабочего режима системы может отыскиваться нужный параметр или наборы параметров. В случае регулировки механизма обратной связи схема 816 сервоуправления может обеспечивать переключение или управление, при которых задействуется обратная связь от нужных источников, например, от схемы автоподстройки фокуса.
Фиг. 9 иллюстрирует процесс переключения конфигурации сервоконтроллера в соответствии с одной реализацией систем и способов, описанных в настоящем документе. В данном примере, на этапе 912, схема управления серворежимом (например, схема 816 сервоуправления) распознает рабочий режим секвенирующего прибора. В некоторых реализациях это распознавание может выполняться путем приема из контроллера или иного устройства секвенирующего прибора сигнала, который для схемы управления сервомотором служит признаком текущего состояния прибора. Например, для указания на состояние секвенирующего прибора в тракте сигнала могут предусматриваться разные уровни сигнала. В качестве еще одного примера, в тракте этого сигнала может передаваться серия битов или байтов, указывающая текущий режим работы.
На этапе 914 схема управления сервомотором определяет режим работы секвенирующего прибора. В соответствии с описанным выше примером, на этом этапе схема управления сервомотором может распознавать, работает ли прибор в режиме формирования модели фокуса или в режиме секвенирования. Если схема управления сервомотором устанавливает, что прибор работает в режиме секвенирования, то на этапе 918 схема управления сервомотором выбирает параметры, управления z-столиком, оптимизированные для операции получения изображений. В реализациях, где также (или вместо этого) выбирается механизм обратной связи, схема управления сервомотором дополнительно, когда прибор работает в режиме секвенирования, может подключать канал обратной связи от схемы а вто под стройки фокуса. Если же схема управления сервомотором установила, что прибор работает в режиме формирования модели фокуса, то на этапе 920 схема управления сервомотором выбирает параметры сервоуправления, оптимизированные для управления z-столиком в этом режиме. В других реализациях могут распознаваться дополнительные рабочие режимы и выбираться параметры для этих режимов.
На этапе 926 выбранные параметры сервоуправления загружаются в соответствующий контур или контуры сервоконтроллера. На этапе 928 сервосистема управляет z-столиком с использованием загруженных параметров и надлежащих механизмов обратной связи.
Фиг. 10 представляет схему примерной реализации схемы сервоуправления в соответствии с одной реализацией систем и способов, описанных в настоящем документе. В данном примере схема 1010 сервоуправления управляет использованием рабочих параметров в сервоконтроллере 1020. Сервоконтроллер 1020 содержит упреждающее управление 1022, контур 1024 управления положением и контур 1028 управления скоростью. В зависимости от сервосистемы, сервоконтроллер может содержать дополнительные или иные контуры управления. Эти контуры управления могут использоваться для работы с разными рабочими характеристиками, зависящими от рабочих параметров, например, от значений коэффициента передачи, значений фильтров и т.п.
Примерная схема 1010 сервоуправления содержит схему 1014 распознавания режима, схему 1012 выбора параметров и хранилище 1016 параметров. Схема 1014 распознавания режима принимает информацию из контроллера прибора, с возможностью использования которого для определения рабочего режима прибора выполнена схема 1014 распознавания режима. В некоторых реализациях прибор может выдавать цифровой или аналоговый сигнал, указывающий текущий рабочий режим прибора. Например, в случае секвенирующего прибора в число рабочих режимов может входить режим формирования модели фокуса и режим секвенирования. В качестве еще одного примера, для указания режима могут использоваться бит, группа битов или флаг, считываемые схемой 1014 распознавания режима для определения рабочего режима.
Когда рабочий режим распознан, схема 1012 выбора параметров выбирает набор параметров, соответствующий распознанному рабочему режиму. В иллюстрируемом примере наборы параметров могут храниться в памяти или другом подобном хранилище, например, в хранилище 1016 параметров, и отыскиваться схемой 1012 выбора параметров. Схема 1012 выбора параметра загружает эти параметры в регулятор или регуляторы соответствующих контуров сервоконтроллера 1020. При изменении режима прибора это изменение может быть распознано схемой 1014 распознавания режима, и новые параметры могут быть выбраны и загружены в соответствующие контуры управления сервоконтроллера 1020. В некоторых реализациях загрузка набора параметров может происходить в реальном времени (но все равно может зависеть от запаздывания в системе или других задержек), что дает возможность оперативной смены сервопараметров.
Набор или наборы параметров, подобранные для обеспечения следящей работы, могут дополнительно оптимизировать для конкретного прибора, в котором используется данная сервосистема. Например, у разных приборов могут быть разные конструктивные или иные характеристики, влияющие на реакцию и взаимодействие с управляющей системой. Такое влияние может приводить к возникновению вибраций, гармонических движений или иных неустойчивостей, которые могут негативно сказываться на качестве работы системы или даже приводить к неисправностям. Соответственно, параметры могут оптимизироваться для конкретного прибора в ручной уточняющей операции или с использованием автоматизированных средств индивидуального подбора параметров для рабочих режимов данного прибора, например, для режимов удержания и сканирования.
В некоторых реализациях операция оптимизации параметров в наборах параметров для данного прибора может выполняться при работе прибора путем пошагового просмотра заранее определенного диапазона значений одного или более параметров управления с измерением устойчивости управляющей системы на каждом шаге. В некоторых случаях каждый параметр управления могут измерять и оптимизировать индивидуально, в других же случаях могут систематически варьировать множество параметров управления для нахождения оптимальных значений комбинации параметров управления. В ходе такого процесса калибровки между шагами с различными значениями параметров управления могут вводить период стабилизации, чтобы неустойчивости, вызванные изменением одного параметра, не создавали помех измерениям при следующем значении параметра. Для конкретной системы могут выбирать оптимальную рабочую точку, например, в виде набора параметров, вносящего минимальную неустойчивость. Оптимальная рабочая точка может проявляться как минимум вариации рабочей характеристики; эта вариация обычно представляется квадратичной зависимостью, можно расчетным путем определять ее рабочий минимум и сохранять его в виде файла индивидуальных настроек данного прибора.
Хотя в примерах, раскрытых в настоящем документе, применяются наборы параметров, которые могут быть использованы для оптимизации сервосистемы под конкретные режимы работы, эта оптимизация может не обеспечивать идеального функционирования. Набор параметров, предназначенный для оптимизации работы в данном режиме, может обеспечивать наилучшее качество работы, возможное в данных обстоятельствах, с учетом ограничений, накладываемых рабочими параметрами, системой и реальными условиями, в которых эта система работает. На оптимизацию также могут влиять компромиссы при проектировании, а результат оптимизации может зависеть от требований к качеству, задаваемых проектировщиками системы с учетом таких компромиссов.
В контексте настоящего документа схема может быть реализована с использованием любой формы аппаратных средств, программных средств или их сочетания. Например, для изготовления схемы может быть использован один или более процессоров, контроллеров, ASIC, PLA, PAL, CPLD, FPGA, логических компонентов, программных модулей или иных средств. При осуществлении изобретения различные схемы, описанные в настоящем документе, могут быть реализованы как дискретные схемы, или функции и признаки описанных схем могут быть частично или полностью распределены между одной или более схемами. Иными словами, различные признаки и функции, описанные в настоящем документе, могут быть реализованы в любой конкретной реализации, и их реализация возможна с использованием одной или более отдельных или совместно используемых схем в различных комбинациях и перестановках. Несмотря на то, что признаки или элементы функциональности могут быть описаны индивидуально или заявлены как отдельные схемы, специалисту обычного уровня в данной области техники должно быть понятно, что эти признаки и функциональность могут быть распределены между одной или более общих схем, и такое описание не требует и не подразумевает необходимости реализации таких признаков или функциональности в отдельных схемах.
Как описано в настоящем документе, контроллеры системы, сервоконтроллеры и другие компоненты систем и способов, описанных в настоящем документе, могут быть реализованы в виде схем. Когда схемы полностью или частично реализованы с использованием программных средств, в одной реализации эти программные элементы могут быть использованы для взаимодействия с вычислительной или обрабатывающей системой, выполненной с возможностью реализации функциональности, описанной в отношении указанных схем. Один пример такой вычислительной системы показан на фиг. 11. Различные примеры описываются на основе этой примерной вычислительной системы 1100. После прочтения этого описания специалисту должно стать понятно, как реализовать данную технологию с использованием других вычислительных систем или архитектур.
Как показано на фиг. 11, вычислительная система 1100 может представлять собой, например, вычислительные или обрабатывающие возможности, имеющиеся в настольных и портативных компьютерах; ручных вычислительных устройствах (смартфонах, сотовых телефонах, ручных компьютерах, планшетах и т.д.); стационарных компьютерах, суперкомпьютерах, рабочих станциях или серверах; или в любом типе вычислительных устройств специального или общего назначения, какой может требоваться или подходить для данного применения или ситуации. Вычислительная система 1100 также может представлять собой вычислительные возможности, реализованные в конкретном устройстве, или возможности, которые каким-то образом могут использоваться этим устройством. Например, вычислительная система может находиться в других электронных устройствах, например, цифровых камерах, навигационных системах, сотовых телефонах, портативных вычислительных устройствах, модемах, роутерах, точках беспроводного доступа к сети, терминалах и иных электронных устройствах, в которых в какой-либо форме реализована возможность обработки информации.
Вычислительная система 1100 может содержать, например, один или более процессоров, контроллеров, модулей управления или других обрабатывающих устройств, например, процессор 1104. Процессор 1104 может быть реализован с использованием обрабатывающего компонента общего назначения или специального назначения, например, микропроцессора (одно-, двух- или многоядерного процессора), сигнального процессора, графического контроллера (например, модуля обработки графики (англ. Graphics Processing Unit, GPU)) или другой управляющей логики. В иллюстрируемом примере процессор 1104 соединен с шиной 1102, хотя для реализации взаимодействия с другими компонентами вычислительной системы 1100 или для обмена информацией с внешними системами может использоваться любое средство обмена информацией.
Вычислительная система 1100 также может содержать один или более модулей памяти, далее называемых просто основной памятью 1108. Например, в некоторых реализациях для хранения информации и инструкций, подлежащих исполнению процессором 1104, может использоваться память с произвольным доступом (англ. Random Access Memory, RAM) или иная динамическая память. Основная память 1108 также может использоваться для хранения временных переменных или другой промежуточной информации в ходе исполнения инструкций процессором 1104. Вычислительная система 1100 также может содержать память только для чтения (англ. Read Only Memory, ROM) или другое статическое запоминающее устройство, соединенное с шиной 1102, для хранения статической информации и инструкций для процессора 1104.
Вычислительная система 1100 также может содержать одно или более средств 1110 хранения информации в разнообразных формах; в число таких средств может входить, например, приемник 1112 носителя информации и интерфейс 1120 запоминающего устройства. Приемник 1112 носителя информации может содержать приводное устройство или иной механизм для установки стационарного или съемного носителя 1114 информации. Например, может быть предусмотрен привод жесткого диска, приемник гибкого диска, приемник магнитной ленты, приемник оптического диска, приемник компакт-диска или диска DVD (однократно записываемого или с возможностью перезаписи), приемник запоминающего устройства на флеш-памяти или другой приемник съемного или стационарного носителя информации. Соответственно, в число носителей информации 1114 могут входить, например, жесткий диск, гибкий диск, магнитная лента, кассета, оптический диск, диск CD или DVD, или другой стационарный или съемный носитель информации, считывание с которого, запись на который или доступ к которому могут осуществляться приемником 1112 носителя информации. Как показывают эти примеры, носителем 1114 информации может быть носитель информации с сохраненными на нем программными средствами или данными, выполненный с возможностью использования компьютером.
В альтернативных реализациях средством 1110 хранения информации могут быть другие подобные технические средства, дающие возможность загрузки компьютерных программ или других инструкций или данных в вычислительную систему 1100. В число таких технических средств могут входить, например, стационарное или съемное запоминающее устройство 1122 и интерфейс 1120. В число примеров таких запоминающих устройств 1122 и интерфейсов 1120 могут входить программный картридж и интерфейс картриджа, съемная память (например, флеш-память или другой съемный модуль памяти) и слот памяти, запоминающее устройство на флеш-памяти (например, накопитель с интерфейсом USB) и соответствующий слот, слот и карта PCMCIA, другие стационарные или съемные запоминающие устройства 1122 и интерфейсы 1120, выполненные с возможностью передачи программы и данных из запоминающего устройства 1122 в вычислительную систему 1100.
Вычислительная система 1100 также может содержать интерфейс 1124 связи. Интерфейс 1124 связи может использоваться для создания возможности передачи программ и данных между вычислительной системой 1100 и внешними устройствами. В число примеров интерфейса 1124 связи могут входить модем или программный модем, сетевой интерфейс (например, Ethernet, плата сетевого интерфейса, WiMedia, IEEE 802.ХХ, Bluetooth® или другой интерфейс), порт связи (например, порт USB, инфракрасный порт, порт RS232 или другой порт) или иной интерфейс связи. Программа и данные, передаваемые через интерфейс 1124 связи, могут переноситься, как правило, сигналами, для которых обеспечивается возможность передачи через данный интерфейс 1124 связи; такие сигналы могут быть электронными, электромагнитными (в том числе оптическими) или иными. Эти сигналы могут передаваться в интерфейс 1124 связи через канал 1128. Канал 1128 выполнен с возможностью передачи сигналов и может быть реализован с использованием проводного или беспроводного средства передачи информации. Некоторыми примерами канала могут быть телефонная линия, канал сотовой связи, радиоканал, оптический канал, сетевой интерфейс, локальная или распределенная сеть и другие проводные или беспроводные каналы связи.
В настоящем документе термины «носитель компьютерной программы» и «носитель информации с возможностью использования компьютером» используются для обобщенного указания на носители информации, например, на память 1108, запоминающее устройство 1120, носители 1114 информации и канал 1128. Эти и другие разнообразные формы носителей компьютерной программы или носителей информации с возможностью использования компьютером могут участвовать в передаче одной или более последовательностей одной или более инструкций в обрабатывающее устройство для исполнения. Такие инструкции, реализованные на носителе информации, называют, как правило, компьютерным программным кодом или компьютерным программным продуктом (они могут группироваться в форме компьютерных программ или иных классификационных единиц). При выполнении таких инструкций вычислительная система 1100 получает возможность реализации признаков или функций технологии, раскрытой в настоящем документе.
Следует понимать, что все комбинации вышеизложенных концепций (при условии отсутствия их взаимной несовместимости) считаются частью объекта изобретения, раскрытого в настоящем документе. Конкретнее, все комбинации заявленного объекта изобретения, представленного в конце настоящего раскрытия, считаются частью объекта изобретения, раскрытого в настоящем документе.
Следует понимать, что описанные выше разнообразные примеры раскрытой технологии представлены лишь с целью примера, но не ограничения. Аналогично, на различных схемах могут быть представлены примеры архитектуры или иных конфигураций для раскрытой технологии, что сделано с целью помощи в понимании признаков и функциональности, которые могут составлять часть раскрытой технологии. Раскрытая технология не ограничена показанными примерными архитектурами или конфигурациями, и нужные признаки могут быть реализованы с использованием разнообразных альтернативных архитектур и конфигураций. Более того, специалисту должно быть очевидно, как для реализации признаков раскрытой в настоящем документе технологии можно использовать другое функциональное, логическое или физическое деление и другие конфигурации. Кроме того, для различных частей могут использоваться названия разных составляющих модулей, отличные от использованных в настоящем документе. Дополнительно, в отношении блок-схем, описаний операций и способов порядок представления шагов в настоящем документе не следует понимать как предписывающий выполнение описанных шагов в разнообразных возможных реализациях в представленном порядке, если из контекста не следует обратное.
Хотя раскрытая технология описана выше на различных примерах и реализациях, следует понимать, что разнообразные признаки, аспекты и функциональность, описанные в одном или более из этих индивидуальных примеров, не ограничены возможностью применения только в том конкретном примере, в котором они описаны, и, напротив, они могут быть применены, самостоятельно или в различных комбинациях, к одному или более другим примерам раскрытой технологии, независимо от того, описаны ли такие примеры и представлены ли такие признаки как часть описанного примера. Таким образом, широта и объем технологии, раскрытой в настоящем документе, никаким из вышеописанных примеров не ограничиваются. Следует понимать, что все комбинации вышеизложенных концепций (при условии отсутствия их взаимной несовместимости) считаются частью объекта изобретения, раскрытого в настоящем документе. Конкретнее, все комбинации заявленного объекта изобретения, представленного в конце настоящего раскрытия, считаются частью объекта изобретения, раскрытого в настоящем документе.
Термины и словосочетания, использованные в настоящем документе, и их разновидности, следует понимать как открытые, а не ограничивающие, если обратное не выражено явным образом. В качестве примеров вышесказанного: термин «содержащий» следует понимать как означающий «содержащий, без ограничения» и т.п.; термин «пример» используется для обозначения примеров обсуждаемого предмета или явления, а не исчерпывающего или ограничивающего перечня таких образцов; артикли «а» и «ап» следует понимать как означающие «по меньшей мере один», «один или более» и т.п.; и такие прилагательные, как «общепринятый», «традиционный», «обычный», «стандартный», «известный» и термины с аналогичным значением не следует понимать как ограничивающие предмет рассмотрения данным периодом времени или предметом, который существует в данное время, а следует понимать как охватывающие общепринятые, традиционные, обычные или стандартные технологии, которые могут существовать или быть известными в настоящее время или в любое время в будущем. Термин «состоящий» в настоящем документе следует понимать как открытый, указывающий на содержание не только перечисленных элементов, но и возможных дополнительных элементов. Аналогично, там, где настоящий документ ссылается на технологии, которые должны быть очевидны или известны специалисту обычного уровня в данной области техники, под такими технологиями понимаются и те технологии, которые должны быть очевидны или известны специалисту сейчас или в любое время в будущем. В той мере, в какой это применимо, в настоящем документе термины «первый», «второй», «третий» и т.д. используются лишь для того, чтобы представить соответствующие объекты, описываемые этими терминами, как отдельные сущности, и не означают хронологический порядок, если обратное не указано явным образом в настоящем документе.
Термин «соединенный» относится к непосредственному или опосредованному соединению, связи, креплению, приведению в контакт или привязке, и может указывать на различные формы связи, такие как физическая, оптическая, электрическая, по текучей среде, механическая, химическая, магнитная, электромагнитная, с возможностью обмена информацией или иная, или на комбинацию перечисленных форм связи. Если указана одна из форм связи, это не означает, что другие формы связи исключаются. Например, упоминание одного компонента, физически связанного с другим компонентом, может указывать на физическое соединение или контакт между этими двумя компонентами (непосредственный или опосредованный), но не исключает других форм связи между этими компонентами, таких как, например, канал связи (например, радиочастотный или оптический канал), также с возможностью обмена информацией связывающий эти два компонента. Аналогичным образом, сами по себе различные термины не являются взаимоисключающими. Например, формой физического соединения, среди прочего, может быть соединение по текучей среде, магнитное соединение или механическое соединение.
Использование в некоторых случаях таких расширяющих слов и словосочетаний, как «один или более», «по меньшей мере», «но не ограничиваясь» или т.п.не должно истолковываться как означающее, что в тех случаях, когда такие расширяющие слова и словосочетания могут отсутствовать, подразумевается или требуется более узкий случай. Использование термина «компонент» не означает, что все элементы или функциональность, описанные или заявленные как часть компонента, сконфигурированы в едином комплексе.
Более того, некоторые или все разнообразные элементы компонента, в том числе конструктивные элементы, могут быть объединены в одном комплексе или могут использоваться по отдельности, а также могут быть распределены по множеству групп или комплексов.
В настоящем документе приведены различные примеры, описанные на основе примерных схем и других иллюстраций. Как должно стать понятно специалисту обычного уровня в данной области техники после прочтения этого документа, представленные примеры и различные их варианты могут быть реализованы без ограничения представленными примерами. Например, функциональные схемы и сопровождающее их описание не должны рассматриваться в качестве указания на обязательность конкретной архитектуры или конфигурации.
Следует понимать, что все комбинации вышеизложенных концепций и дополнительных концепций, подробно рассмотренных ниже (при условии отсутствия взаимной несовместимости этих концепций) считаются частью объекта изобретения, раскрытого в настоящем документе. Конкретнее, все комбинации заявленного объекта изобретения, представленного в конце настоящего раскрытия, считаются частью объекта изобретения, раскрытого в настоящем документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УЛУЧШЕННОЙ АВТОФОКУСИРОВКИ С ПРЕДСКАЗАНИЕМ | 2010 |
|
RU2522123C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ (ВАРИАНТЫ) И РАСТРОВЫЙ ЭЛЕКТРОННЫЙ МИКРОСКОП | 2009 |
|
RU2415380C1 |
| Покровное и предметное стекло с печатью для определения базовой фокальной плоскости для световой микроскопии | 2020 |
|
RU2784860C1 |
| УСТРОЙСТВО И СПОСОБ ОБЕСПЕЧЕНИЯ ОЦЕНКИ ПАРАМЕТРОВ | 2020 |
|
RU2825597C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ | 2013 |
|
RU2528582C1 |
| УСТРОЙСТВО И СПОСОБЫ ДЛЯ ПРЕДИКТИВНОГО ОТСЛЕЖИВАНИЯ ФОКУСА | 2017 |
|
RU2710004C1 |
| МИКРОСКОПИЯ СТРУКТУРИРОВАННОГО ОСВЕЩЕНИЯ С ЛИНЕЙНЫМ СКАНИРОВАНИЕМ | 2019 |
|
RU2736104C1 |
| СИСТЕМА И СПОСОБ ДЛЯ СВЯЗАННОЙ СО ВРЕМЕНЕМ МИКРОСКОПИИ БИОЛОГИЧЕСКИХ ОРГАНИЗМОВ | 2010 |
|
RU2548597C2 |
| СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ ФЛУОРЕСЦЕНЦИИ ПРИ СЕКВЕНИРОВАНИИ ДНК | 2021 |
|
RU2786926C1 |
| ДАТЧИК ДЛЯ МИКРОСКОПИИ | 2010 |
|
RU2567295C2 |
Группа изобретений относится к области биотехнологии. Предложена система получения изображений (варианты) и способ сервоуправления в системе получения изображений (варианты). Система содержит предметный столик для установки образца, оптический столик с объективом, исполнительное устройство для перемещения предметного столика относительно оптического столика, сервосхему для управления исполнительным устройством и схему сервоуправления. При этом в одном варианте система также содержит схему автоподстройки фокуса. Способ включает определение схемой распознавания факта работы системы в режиме формирования модели фокуса, определение схемой сервоуправления набора параметров управления для указанного режима, применение схемой сервоуправления набора параметров управления к сервосхеме для управления работой исполнительного устройства, а при обнаружении схемой распознавания перехода системы получения изображений в сканирующий режим определение схемой сервоуправления набора параметров управления для сканирующего режима и применение указанного набора к сервосхеме. При этом в одном варианте способ включает включение обратной связи от схемы автоподстройки фокуса к сервосхеме при сканирующем режиме и выключение обратной связи при режиме формирования модели фокуса. Изобретения обеспечивают оптимизацию системы управления сервоприводом. 4 н. и 8 з.п. ф-лы, 1 табл., 11 ил.
1. Система получения изображений, содержащая:
предметный столик, содержащий поверхность для установки образца, подлежащего сканированию системой получения изображений;
оптический столик, содержащий объектив и выполненный с возможностью изменения положения относительно предметного столика;
исполнительное устройство, физически соединенное по меньшей мере с одним из предметного столика и оптического столика для перемещения предметного столика относительно оптического столика;
сервосхему для управления указанным исполнительным устройством;
первый набор параметров управления для управления сервосхемой в режиме формирования модели фокуса;
второй набор параметров управления для управления сервосхемой в сканирующем режиме;
и схему сервоуправления, выполненную с возможностью применения к сервосхеме первого набора параметров управления, когда система получения изображений работает в первом режиме работы, представляющем собой режим формирования модели фокуса, и применения к сервосхеме второго набора параметров управления, когда система получения изображений работает во втором режиме работы, представляющем собой сканирующий режим,
при этом схема сервоуправления содержит схему распознавания режима, выполненную с возможностью распознавания режима работы системы получения изображений, и схему выбора параметра, выполненную с возможностью применения первого набора параметров управления или второго набора параметров управления, соответствующих распознанным первому режиму работы или второму режиму работы.
2. Система получения изображений по п. 1, отличающаяся тем, что она представляет собой секвенирующее устройство.
3. Система получения изображений по п. 1, отличающаяся тем, что схема сервоуправления дополнительно выполнена с возможностью определения режима работы системы получения изображений и выбора набора параметров управления для использования в распознанном режиме работы.
4. Система получения изображений по п. 3, отличающаяся тем, что схема сервоуправления выполнена с возможностью применения первого или второго набора параметров управления, определенных в качестве набора параметров управления для распознанного режима работы.
5. Система получения изображений по п. 3, отличающаяся тем, что указанный по меньшей мере один из первого и второго наборов параметров управления оптимизирован с учетом конструктивных характеристик системы получения изображений.
6. Система получения изображений по п. 5, отличающаяся тем, что
а) оптимизация по меньшей мере одного из первого и второго наборов параметров управления включает использование системы получения изображений, просмотр диапазона значений параметра управления из набора из первого и второго наборов параметров управления, измерение устойчивости сервосхемы в ходе указанного просмотра и выбор значения параметра управления,
или b) оптимизация по меньшей мере одного из первого и второго наборов параметров управления включает использование системы получения изображений, просмотр диапазона значений множества параметров управления из набора из первого и второго наборов параметров управления, измерение устойчивости сервосхемы в ходе указанного просмотра и определение оптимальных значений для указанного множества параметров управления.
7. Система получения изображений по п. 1, отличающаяся тем, что
а) система получения изображений дополнительно содержит схему автоподстройки фокуса, электрически соединенную с оптическим столиком; при этом схема сервоуправления дополнительно выполнена с возможностью включения обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в сканирующем режиме и с возможностью выключения обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в режиме формирования модели фокуса,
или b) указанные параметры управления включают в себя значения коэффициента передачи в сервоконтурах,
или с) исполнительное устройство физически соединено с предметным столиком для перемещения предметного столика с целью регулировки расстояния между предметным столиком и оптическим столиком,
или d) система получения изображений дополнительно содержит множество исполнительных устройств, физически соединенных с предметным столиком, для регулировки наклона предметного столика,
или е) исполнительное устройство физически соединено с оптическим столиком для перемещения оптического столика с целью регулировки расстояния между предметным столиком и указанным оптическим столиком, причем опционально исполнительное устройство содержит по меньшей мере одно из пьезоэлектрического устройства, звуковой катушки и приводного мотора,
или f) образец находится в проточной ячейке или на предметном стекле.
8. Способ сервоуправления в системе получения изображений, включающий:
определение схемой распознавания режима, в ходе работы системы получения изображений, факта работы системы получения изображений в первом режиме работы, представляющем собой режим формирования модели фокуса;
определение схемой сервоуправления первого набора параметров управления, выбранного для указанного режима формирования модели фокуса;
применение схемой сервоуправления указанного определенного первого набора параметров управления к сервосхеме системы получения изображений, при этом сервосхема управляет работой исполнительного устройства, физически соединенного по меньшей мере с одним из предметного столика или оптического столика системы получения изображений, для перемещения предметного столика относительно оптического столика;
и в случае обнаружения схемой распознавания режима, во время работы системы получения изображений, перехода системы получения изображений во второй режим работы, представляющий собой сканирующий режим, определение схемой сервоуправления второго набора параметров управления, выбранного для указанного сканирующего режима, и применение указанного определенного второго набора параметров управления к сервосхеме.
9. Способ по п. 8, дополнительно включающий оптимизацию по меньшей мере одного из первого и второго наборов параметров управления для учета конструктивных характеристик системы получения изображений, причем опционально
i) оптимизация по меньшей мере одного из первого и второго наборов параметров управления включает использование системы получения изображений, просмотр диапазона значений параметра управления из набора из первого и второго наборов параметров управления, измерение устойчивости сервосхемы в ходе указанного просмотра и выбор значения параметра управления,
или ii) оптимизация по меньшей мере одного из первого и второго наборов параметров управления включает использование системы получения изображений, просмотр диапазона значений множества параметров управления из набора из первого и второго наборов параметров управления, измерение устойчивости сервосхемы в ходе указанного просмотра и определение оптимальных значений для указанного множества параметров управления.
10. Способ по п. 8, отличающийся тем, что
i) схема сервоуправления дополнительно включает обратную связь от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в сканирующем режиме и выключает обратную связь от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в режиме формирования модели фокуса,
или ii) параметры управления включают в себя коэффициенты передачи в сервоконтурах,
или iii) способ дополнительно включает перемещение исполнительным устройством предметного столика для регулировки расстояния между предметным столиком и оптическим столиком, причем опционально исполнительное устройство содержит по меньшей мере одно из пьезоэлектрического устройства, звуковой катушки и приводного мотора,
или iv) система получения изображений представляет собой секвенирующее устройство.
11. Система получения изображений, содержащая:
предметный столик, содержащий поверхность для установки образца, подлежащего сканированию указанной системой получения изображений;
оптический столик, содержащий объектив и выполненный с возможностью изменения положения относительно предметного столика;
схему автоподстройки фокуса, соединенную с оптическим столиком;
исполнительное устройство, физически соединенное по меньшей мере с одним из предметного столика и оптического столика для перемещения предметного столика относительно оптического столика на основании информации из схемы автоподстройки фокуса;
сервосхему для управления указанным исполнительным устройством;
и схему сервоуправления для включения обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в сканирующем режиме работы и для выключения обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в режиме формирования модели фокуса,
при этом схема сервоуправления содержит схему распознавания режима, выполненную с возможностью распознавания режима работы системы получения изображений, и схему выбора параметра, выполненную с возможностью применения первого набора параметров управления для режима формирования модели фокуса или второго набора параметров управления для сканирующего режима.
12. Способ сервоуправления в системе получения изображений, включающий:
распознавание схемой распознавания режима, в ходе работы системы получения изображений, того, в каком режиме работает система получения изображений - сканирующем режиме или режиме формирования модели фокуса;
управление, посредством сервосхемы, движением оптического столика относительно предметного столика в системе получения изображений;
и, посредством схемы сервоуправления, включение обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в сканирующем режиме работы и выключение обратной связи от схемы автоподстройки фокуса к сервосхеме при работе системы получения изображений в режиме формирования модели фокуса.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| МИКРОСКОП, УСТРОЙСТВО ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ И СИСТЕМА ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ | 2011 |
|
RU2540453C2 |

