Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству управления приводом транспортного средства, в котором используется комбинация из нескольких приводных устройств.
Предшествующий уровень техники
В качестве приводного блока транспортного средства известно устройство, у которого левая и правая оси транспортного средства соединены с дифференциальным механизмом, а приводная мощность передается на дифференциальный механизм через редуктор, с использованием электродвигателя, соосно расположенного на внешней периферийной стороне одной из осей (см., например, патентный документ 1).
Подобный приводной блок 100, показанный на фиг.35, оборудован электродвигателем 102, приводящим в движение оси, редуктором 112 с планетарной передачей, редуцирующим приводную скорость вращения электродвигателя 102, а также дифференциальным механизмом 113, распределяющим выходную мощность из редуктора с 112 планетарной передачей между левой и правой осями, 110A и 110B, транспортного средства, причем редуктор 112 с планетарной передачей и электродвигатель 102 расположены соосно друг с другом на внешней периферийной стороне оси 110B, одна из осей соединена с дифференциальным механизмом 113. Кроме этого, солнечная шестерня 121 и водило 123 планетарной передачи электродвигателя 112 соединены соответственно с ротором 115 электродвигателя 102 и картером 131 дифференциала дифференциального механизма 113, кольцевая шестерня 124 планетарного редуктора 112 вращательно расположена в корпусе 111 редуктора, который закреплен на раме транспортного средства, а гидравлический тормоз 128, прикладывающий тормозное усилие к кольцевой шестерне 124 за счет зацепления кольцевой шестерни 124 с корпусом 111 редуктора, находится между кольцевой шестерней 124 и корпусом 111 редуктора.
При приложении гидравлическим тормозом 128 тормозного усилия к кольцевой шестерне 124 кольцевая шестерня фиксируется в корпусе 111 редуктора, а приводная мощность, поступающая с ротора 115 электродвигателя 102 на солнечную шестерню 121, передается на картер 131 дифференциала дифференциального механизма 113 при одновременном редуцировании скорости на заданное передаточное число. Приводная мощность, передаваемая на картер 131 дифференциала, распределяется между левой и правой осями 110A и 110B транспортного средства дифференциальным механизмом 113. Кроме этого, при прекращении тормозного усилия, создаваемого гидравлическим тормозом 128, кольцевая шестерня 124 свободно вращается относительно корпуса 111 редуктора. Поэтому, например, при прекращении тормозного усилия, создаваемого гидравлическим тормозом 128, в случае если скорость вращения осей 110А и 110B будет выше скорости, необходимой для работы электродвигателя 102, кольцевая шестерня 124 будет вращаться на холостом ходу внутри корпуса 111 редуктора, с учетом дополнительной скорости вращения осей 110A и 110B, а крутящий момент с осей 110A и 110B не будет передаваться на электродвигатель 102. Поэтому, если использование электродвигателя 102 в режиме движения и рекуперации не требуется, соответствующее вращение электродвигателя 102 можно предотвратить за счет прекращения передачи тормозного усилия с гидравлического тормоза 128, тем самым сократив потребление топлива.
На фиг.37 показан общий вид гибридного транспортного средства, описанного в Патентном документе 2. Кроме этого, на фиг.38 показано передающее устройство для передачи крутящего момента, предназначенное для использования в гибридном транспортном средстве, описанном в Патентном документе 2. Гибридное транспортное средство H, показанное на фиг.37 и 38, может приводиться в движение, по меньшей мере, при помощи одного из следующих устройств: двигателя 101 или электродвигателя 102. Гибридное транспортное средство H оснащено механизмом 106 сцепления, механизмом 141 управления соединением и механизмом 121 управления скоростью вращения.
В механизме 106 сцепления односторонняя муфта 105 для передачи крутящего момента с электродвигателя 102 на ходовую часть при начале движения транспортного средства из положения остановки, а также гидромуфта 104 для гидравлического соединения выходного вала 121 электродвигателя 102 с ведущим валом 103 расположены параллельно ведущему валу 103. Механизм 141 управления соединением расцепляет гидромуфту, если скорость вращения электродвигателя 102 равна или превышает его допустимую скорость вращения и повторно зацепляет гидромуфту 104 в случае возникновения рабочих условий, допускающих вращение электродвигателя 102. Как показано на фиг.39, во время повторного зацепления механизм 122 управления скоростью вращения осуществляет управление, при котором скорость вращения электродвигателя 102 резко увеличивается до скорости вращения (переходной скорости вращения г), которая ниже заданной скорости R вращения на определенную величину, после чего скорость вращения электродвигателя 102 увеличивается постепенно до заданной скорости R вращения.
В подобном гибридном транспортном средстве H за счет управления, осуществляемого при помощи механизма 122 управления скоростью вращения, можно избежать явления, при котором скорость вращения электродвигателя 102 превышает заданную скорость R вращения, таким образом, чтобы выходной вал 121 электродвигателя 102 плавно зацеплялся с односторонней муфтой 105. Соответственно можно предотвратить механический удар, возникающий в том случае, если выходной вал 121 электродвигателя 102 резко зацепляется с односторонней муфтой 105.
Документ из предшествующего уровня техники
Патентный документ:
Патентный документ 1: Японская опубликованная патентная заявка №2006-264647.
Патентный документ 2: Японская опубликованная патентная заявка №2008-239041.
Краткое изложение сущности изобретения
Проблемы, на решение которых направлено изобретение
Если необходимо использовать электродвигатель 102 для приведения в движение транспортного средства и рекуперации, приводной блок 100, изображенный на фиг.35, прикладывает тормозное усилие, создаваемое гидравлическим тормозом 128, на кольцевую шестерню 124. В подобном положении, поскольку кольцевая шестерня 124 закреплена в корпусе 111 редуктора, приводное усилие передается между солнечной шестерней 121 и водилом 123 планетарной передачи электродвигателя 112. В результате осуществляется передача крутящего момента между осями 110А и 110B и электродвигателем 102.
С другой стороны, если использование электродвигателя 102 в режиме силового привода и рекуперации не требуется, приводной блок 100 не прикладывает тормозного усилия, создаваемого гидравлическим тормозом 128, к кольцевой шестерне 124. В таком положении кольцевая шестерня 124 вращается вхолостую внутри корпуса 111 редуктора, поэтому приводное усилие между солнечной шестерней 121 и водилом 123 планетарной передачи электродвигателя 112 не передается. Соответственно передачи крутящего момента между осями 110А и 110B и электродвигателем 102 не происходит.
Если электродвигатель 102 используется в качестве вспомогательного приводного устройства транспортного средства, а двигатель внутреннего сгорания или аналогичное устройство используется в качестве основного приводного устройства, приводной блок 100 выбирает одно из двух положений в зависимости от параметров движения транспортного средства. Например, при движении с постоянной высокой скоростью транспортное средство использует только тягу, создаваемую двигателем внутреннего сгорания. В этом случае когда передача крутящего момента происходит между осями 110A и 110B и электродвигателем 102, ротор электродвигателя 102 также принудительно вращается вращающими силами, возникающими со стороны осей 110A и 110B. Соответственно приводной блок прекращает прикладывать тормозное усилие, создаваемое гидравлическим тормозом 128, к кольцевой шестерне 124. В свою очередь, когда транспортное средство начинает движение или замедляет движение, используются движущая сила, создаваемая электродвигателем 102. В этот момент приводной блок 100 прикладывает тормозное усилие, создаваемое гидравлическим тормозом 128, к кольцевой шестерне 124.
Как отмечалось выше, тормозное усилие, создаваемое гидравлическим тормозом 128, прикладывается к кольцевой шестерне 124, либо приложение усилия прекращается в зависимости от параметров движения транспортного средства; каждый раз при приложении/прекращении усилия положение устройств, находящихся между солнечной шестерней 121 и водилом 123 планетарной передачи, также меняется. Передача крутящего момента между солнечной шестерней 121 и водилом 123 планетарной передачи осуществляется, по меньшей мере, посредством двух шестерней, расположенных оппозитно друг другу. Зазор, т.н. «люфт», имеющийся между двумя шестернями, расположенными оппозитно друг другу и зацепляющимися другу с другом, показан на фиг.36. За счет подобного люфта шестерни могут свободно перемещаться. Однако когда одна из шестерней, вращающаяся в одном направлении, начинает вращаться в противоположном направлении или когда одна из шестерней, находящаяся в неподвижном положении начинает вращаться в том направлении, где имеется люфт, происходит удар. Подобный удар создает вибрацию и шум, а также сокращает срок службы машины.
Таким образом, за счет приложения или прекращения приложения тормозного усилия к солнечной шестерне 124, даже если направление вращения шестерни, расположенной между солнечной шестерней 121 и водилом 123 планетарной передачи, изменяется, желательно, чтобы удар, возникающий из-за люфта, управлялся таким образом, чтобы его можно было уменьшить.
Кроме этого, в гибридном транспортном средстве Н, изображенном на фиг.37, двигатель 101 и электродвигатель 102 расположены со стороны ведущего вала 103, а со стороны другой оси (ведомого вала) приводные устройства отсутствуют. Тем не менее, в случае компоновки, при которой со стороны другой оси имеется электродвигатель, используемый в качестве вспомогательного приводного устройства, помимо двигателя 101 и электродвигателя 102, а для передачи крутящего момента с подобного электродвигателя на ось используется односторонняя муфта, то при зацеплении односторонней муфты из-за разной скорости вращения передних и задних колес возникает удар.
В рассмотренном выше гибридном транспортном средстве Н механический удар, возникающий во время зацепления односторонней муфты, предотвращается за счет управления скоростью вращения электродвигателя 102. Между тем, в Патентном документе 2 не рассматриваются способы предотвращения или уменьшения силы удара во время работы электродвигателя, оснащенного блоком привода с множеством компонентов, таких как односторонняя муфта и тормозное устройство.
Цель настоящего изобретения заключается в том, чтобы предложить блок управления движением транспортного средства, позволяющий уменьшить удар, возникающий в силовом передающем устройстве, расположенном на линии силовой передачи.
Средства для решения проблемы
Для решения вышеупомянутых проблем и достижения цели настоящего изобретения блок управления движением по п.1 настоящего изобретения является блоком управления движением транспортного средства (например, транспортного средства 3 по одному из вариантов осуществления). Транспортное средство включает в себя: приводное устройство (например, двигатель 4 внутреннего сгорания и электродвигатель 5), выполненное с возможностью передачи движущей силы на первую ось (например, основной ведущий вал 8 по одному из вариантов осуществления), являющуюся одной из передних или задних колесных осей; электродвигатель (например, электродвигатели 2А и 2B по одному из вариантов осуществления), выполненные с возможностью передачи движущей силы на вторую ось (например, оси 10А и 10B по одному из вариантов осуществления), являющуюся другой, передней или задней колесной осью; одностороннее силовое передающее устройство (например, одностороннюю муфту 50 по одному из вариантов осуществления), расположенную на линии силовой передачи между второй осью и электродвигателем для передачи движущей силы от электродвигателя на вторую ось; двустороннее силовое передающее устройство (например, гидравлические тормоза 60А и 60B по одному из вариантов осуществления), расположенные на линии силовой передачи, параллельно одностороннему силовому передающем устройству для передачи вращающего усилия со второй оси на электродвигатель или передачи движущей силы и рекуперируемой движущей силы с электродвигателя на вторую ось. Блок управления движением включает в себя: первый датчик (например, датчик 117 скорости транспортного средства или датчики 117а и 117b скорости вращения по одному из вариантов осуществления), определяющий скорость транспортного средства или скорость вращения второй оси; секцию определения заданной скорости вращения (например, исполнительный ЭБУ 9 по одному из вариантов осуществления), определяющую заданную скорость вращения электродвигателя на основании скорости транспортного средства или скорости вращения второй оси, определяемой первым датчиком; второй датчик (например, датчики положения 20А и 20B и исполнительный ЭБУ 9), определяющий скорость вращения электродвигателя; а также блок управления (например, исполнительный ЭБУ 9 по одному из вариантов осуществления), управляющий электродвигателем таким образом, чтобы скорость вращения электродвигателя синхронизировалась с заданной скоростью вращения, а также управляющий выходным крутящим моментом электродвигателя или включением двустороннего устройства силовой передачи, при использовании электродвигателя в режиме движения или рекуперации во время перемещения транспортного средства за счет движущей силы от приводного устройства.
Кроме этого, в блоке управления движением по п.2 настоящего изобретения блок управления приводит в действие двустороннее силовое передающее устройство, когда электродвигатель используется в режиме движения с рекуперацией, а скорость вращения электродвигателя достигает пороговой скорости вращения ниже заданной скорости вращения.
Кроме этого, в блоке управления движением по п.3 настоящего изобретения блок управления управляет электродвигателем таким образом, чтобы электродвигатель создавал определенный крутящий момент, когда электродвигатель используется в режиме движения, а скорость вращения электродвигателя достигает пороговой скорости вращения, ниже заданной скорости вращения.
Кроме этого, у блока управления движением по п.4 настоящего изобретения заданный крутящий момент является постоянным крутящим моментом, необходимым для синхронизации скорости вращения электродвигателя с заданной скоростью вращения.
Кроме этого, блок управления движением по п.5 настоящего изобретения включает в себя редуктор (например, редукторы 12А и 12B планетарной передачи по одному из вариантов осуществления изобретения), расположенный на линии силовой передачи, между второй осью и электродвигателем.
Кроме этого, в блоке управления движением по п.6 настоящего изобретения у каждого, левого и правого, колес второй оси (например, по одному из вариантов осуществления для заднего левого колеса, ЗПк и заднего правого колеса, ЗПк) имеется собственный электродвигатель, редуктор, двустороннее силовое передающее устройство и вторая ось, а блок управления индивидуально управляет выходным крутящим моментом электродвигателя для левого и правого колес или работой двустороннего силового передающего устройства для левого и правого колес, если электродвигатель работает в режиме движения или рекуперации во время поворота транспортного средства за счет движущей силы от приводного устройства.
Кроме этого, в блоке управления движением по п.7 настоящего изобретения блок управления приводит в действие двустороннее силовое передающее устройство, когда электродвигатель работает в режиме движения, а скорость вращения электродвигателя достигает пороговой скорости вращения, ниже заданной скорости вращения; причем блок управления инактивирует двустороннее силовое передающее устройство после синхронизации скорости вращения электродвигателя с заданной скоростью вращения.
Кроме этого, в блоке управления движением по п.8 настоящего изобретения блок управления приводит в действие двустороннее силовое передающее устройство, когда электродвигатель работает в режиме рекуперации, а скорость вращения электродвигателя достигает пороговой скорости вращения, ниже заданной скорости вращения; причем блок управления оставляет двустороннее силовое передающее устройство во включенном положении даже после синхронизации скорости вращения электродвигателя с заданной скоростью вращения.
Кроме этого, в блоке управления движением по п.9 настоящего изобретения блок управления определяет, что скорость вращения электродвигателя синхронизирована с заданной скоростью вращения, если скорость вращения электродвигателя превысила пороговую скорость вращения и достигла заданной скорости вращения.
Кроме этого, в блоке управления движением по п.10 настоящего изобретения двустороннее силовое передающее устройство передает усилие между второй осью и электродвигателем за счет гидравлического давления; причем блок управления определяет, что скорость вращения электродвигателя синхронизирована с заданной скоростью вращения, если гидравлическое давление в двустороннем силовом передающем устройстве достигло порогового значения.
Кроме этого, в блоке управления движением по п.11 настоящего изобретения блок управления определяет, что скорость вращения электродвигателя синхронизирована с заданной скоростью вращения по тому, что после приведения в действие двустороннего силового передающего устройства прошло определенное количество времени.
Кроме этого, в блоке управления движением по п.12 настоящего изобретения блок управления управляет электродвигателем таким образом, чтобы электродвигатель создавал заданный крутящий момент, когда электродвигатель работает в режиме рекуперации, а скорость вращения электродвигателя достигает пороговой скорости вращения ниже заданной скорости вращения; причем блок управления продолжает использовать двустороннее передающее устройство после того как скорость вращения электродвигателя была синхронизирована с заданной скоростью вращения.
Кроме этого, в блоке управления движением по п.13 настоящего изобретения блок управления управляет электродвигателем таким образом, чтобы электродвигатель создавал заданный крутящий момент, когда электродвигатель работает в режиме движения, а скорость вращения электродвигателя достигает пороговой скорости вращения, ниже заданной скорости вращения; причем блок управления управляет электродвигателем таким образом, чтобы электродвигатель выдавал запрашиваемый крутящий момент после того как скорость вращения электродвигателя была синхронизирована с заданной скоростью вращения.
Кроме этого, в блоке управления движением по п.14 настоящего изобретения блок управления управляет электродвигателем таким образом, чтобы выходной крутящий момент, создаваемый электродвигателем, был равен 0 после того как скорость вращения электродвигателя была синхронизирована с заданной скоростью вращения.
Кроме этого, в блоке управления движением по п.15 настоящего изобретения блок управления определяет, что скорость вращения электродвигателя синхронизирована с заданной скоростью вращения по тому, что скорость вращения электродвигателя превысила пороговую скорость вращения и достигла заданной скорости вращения.
Кроме этого, в блоке управления движением по п.16 настоящего изобретения блок управления определяет, что скорость вращения электродвигателя синхронизирована с заданной скоростью вращения по тому, что после того как блок управления начал управление электродвигателем таким образом, чтобы электродвигатель создавал заданный крутящий момент, прошло определенное количество времени.
Кроме этого, у блока управления движением по п.17 настоящего изобретения заданный крутящий момент является постоянным крутящим моментом, необходимым для синхронизации скорости вращения электродвигателя с заданной скоростью вращения.
Эффект от изобретения
Блок управления движением по пп.1-17 настоящего изобретения позволяет ослабить удар, возникающий в силовом передающем устройстве, расположенном на линии силовой передачи.
Блок управления движением по п.5 настоящего изобретения позволяет уменьшить удар, возникающий из-за люфта, даже в том случае, если происходит изменение направления вращения шестерней редуктора на линии силовой передачи.
Блок управления движением по пп.7 и 8 настоящего изобретения позволяет уменьшить удар, возникающий из-за разницы скоростей вращения между передними колесами (например, расположенными со стороны передней оси) и задними колесами (например, расположенными со стороны второй оси).
Блок управления движением по пп.12 и 13 настоящего изобретения после того как скорость вращения электродвигателя была синхронизирована с заданной скоростью вращения за счет того, что электродвигатель создал заданный крутящий момент, позволяет осуществлять зацепление при помощи одностороннего силового передающего устройства, а тормозное устройство приводится в действие после того как скорость вращения электродвигателя была синхронизирована с заданной скоростью вращения. За счет этого удается избежать удара при использовании одностороннего силового передающего устройства или тормозного устройства во время работы электродвигателя.
Краткое описание чертежей
На фиг.1 в виде блок-схемы схематично показана компоновка гибридного транспортного средства по одному из вариантов осуществления транспортного средства, на котором может быть установлено приводное устройство;
на фиг.2 показан вид приводного устройства в вертикальной проекции, в сечении;
на фиг.3 показан местный, укрупненный вид приводного устройства по фиг.2;
на фиг.4 показан вид в перспективе приводного устройства, установленного на раме;
на фиг.5 показан расчетный график приводного устройства в момент остановки транспортного средства;
на фиг.6 показан расчетный график приводного устройства при движении транспортного средства вперед, приводное устройство используется в режиме движения;
на фиг.7 показан расчетный график приводного устройства при движении транспортного средства вперед, приводное устройство используется в режиме движения накатом, а электродвигатели остановлены;
на фиг.8 показан расчетный график приводного устройства при движении транспортного средства вперед, приводное устройство используется в режиме движения накатом и происходит рекуперация электродвигателей;
на фиг.9 показан расчетный график приводного устройства при движении транспортного средства назад, приводное устройство используется в режиме движения;
на фиг.10 показан расчетный график приводного устройства при движении транспортного средства назад, приводное устройство используется в режиме движения накатом;
на фиг.11 показано состояние электродвигателей 2А, 2B и состояние механизма расцепления во время движения транспортного средства 3;
на фиг.12 схематически показана компоновка приводного блока 1, расположенного со стороны заднего левого колеса, ЗПк;
на фиг.13 показан временной график с различными параметрами, когда транспортное средство 3 после движения с постоянной высокой скоростью или самопроизвольного замедления ускоряется;
на фиг.14 в виде блок-схемы показана последовательность управляющих действий, совершаемых исполнительным ЭБУ 9 при получении запроса об ускорении;
на фиг.15 в виде блок-схемы показана другая последовательность управляющих действий, совершаемых исполнительным ЭБУ 9 при получении запроса об ускорении;
на фиг.16 показан временной график с различными параметрами, когда транспортное средство 3 после движения с постоянной высокой скоростью или резкого замедления осуществляет замедление с рекуперацией;
на фиг.17 в виде блок-схемы показана последовательность действий, совершаемых исполнительным ЭБУ 9 при получении запроса о замедлении;
на фиг.18 в виде блок-схемы показана другая последовательность действий, совершаемых исполнительным ЭБУ 9 при получении запроса о замедлении;
на фиг.19 в виде блок-схемы показана еще одна последовательность действий, совершаемых исполнительным ЭБУ 9 при получении запроса о замедлении;
на фиг.20 в виде блок-схемы показано управление, осуществляемое приводным блоком 1;
на фиг.21 показано состояние электродвигателей 2А, 2B и состояние механизма расцепления в режиме движения транспортного средства 3;
на фиг.22 показан временной график с различными параметрами, когда режим движения транспортного средства 3 меняется с постоянной высокой скорости на режим замедления с рекуперацией;
на фиг.23 показано состояние электродвигателей 2А, 2B и состояние механизма расцепления в режиме движения транспортного средства 3;
на фиг.24 показан временной график с различными параметрами, когда транспортное средство 3 после самопроизвольного замедления ускоряется;
на фиг.25 в виде блок-схемы показана последовательность действий по управлению, осуществляемых исполнительным ЭБУ 9;
на фиг.26 в виде блок-схемы показана другая последовательность действий по управлению, осуществляемых исполнительным ЭБУ 9;
на фиг.27 в виде блок-схемы показана еще одна последовательность действий по управлению, осуществляемых исполнительным ЭБУ 9;
на фиг.28 показано состояние электродвигателей 2А, 2B и состояние механизма расцепления в режиме движения транспортного средства 3;
на фиг.29 показан временной график с различными параметрами, когда режим движения транспортного средства 3 меняется с постоянной высокой скорости на режим замедления с рекуперацией;
на фиг.30 показано состояние электродвигателей 2А, 2B и состояние механизма расцепления в режиме движения транспортного средства 3;
на фиг.31 показан временной график с различными параметрами, когда транспортное средство 3 после самопроизвольного замедления набирает скорость;
на фиг.32 в виде блок-схемы показана последовательность действий по управлению, осуществляемых исполнительным ЭБУ 9;
на фиг.33 в виде блок-схемы показана другая последовательность действий по управлению, осуществляемых исполнительным ЭБУ 9;
на фиг.34 в виде блок-схемы схематично показана компоновка гибридного транспортного средства по другому варианту осуществления транспортного средства, на котором может быть установлено приводное устройство;
на фиг.35 показан вид в вертикальной проекции, в сечении, на котором изображено приводное устройство из Патентного документа 1;
на фиг.36 показан пример относительного расположения двух оппозитных шестерней и люфта между ними;
на фиг.37 показан общий вид гибридного транспортного средства из Патентного документа 2;
на фиг.38 показан механизм передачи крутящего момента, используемый в гибридном транспортном средстве из Патентного документа 2; и
на фиг.39 изображен временной график, на котором показано управление скоростью вращения электродвигателя, осуществляемое механизмом управления скоростью вращения, используемым в гибридном транспортном средстве по фиг.38.
Способы осуществления изобретения
Ниже со ссылкой на фиг.1-4 будет рассмотрен один из вариантов осуществления настоящего изобретения.
В приводном блоке 1 по настоящему изобретению электродвигатели 2А и 2B выступают в качестве источников движения осей транспортного средства 3, оснащенного, например, приводной системой, показанной на фиг.1.
Транспортное средство 3 по фиг.1 является гибридным транспортным средством, оснащенным приводным блоком 6, состоящим из двигателя 4 внутреннего сгорания и электродвигателя 5, соединенных последовательно в передней части транспортного средства, а приводная мощность, создаваемая подобным приводным блоком 6, передается на передние колеса Пк через трансмиссию 7 и вал 8 главной передачи; с другой стороны, приводная мощность, создаваемая приводным блоком 1, расположенным в задней части транспортного средства, отдельно от приводного блока 6, передается на задние колеса Зк (ЗПк и ЗПк). Электродвигатель 5 приводного блока 6 и электродвигатели 2А и 2B приводного блока 1, расположенного со стороны задних колес (Зк), соединены с аккумулятором через СПУ (силовое приводное устройство) (не показано), а электропитание от аккумулятора и рекуперация энергии в аккумулятор осуществляются через СПУ. Кроме этого, исполнительный ЭБУ (MG ECU) 9 управляет работой электродвигателей 2А и 2B и гидравлических тормозных устройств 60А и 60B, расположенных в приводном блоке 1.
На фиг.2 в вертикальной проекции, в сечении полностью показана вся конструкция приводного блока 1; на данной фигуре позициями 10А и 10B обозначены левая и правая оси, расположенные со стороны задних колес Зк транспортного средства 3, подобные оси расположены соосно в поперечном направлении транспортного средства. Корпус 11 редуктора приводного блока 1 имеет примерно цилиндрическую форму, внутри которой, соосно осям 10А и 10B расположены электродвигатели 2А и 2BВ, приводящие в движение оси и редукторы 12А и 12B планетарной передачи, редуцирующие скорость вращения электродвигателей 2А и 2B. Электродвигатель 2А и редуктор 12А планетарной передачи управляют задним левым колесом, ЗПК, а электродвигатель 2B и редуктор 12B с планетарной передачей управляют задним правым колесом, ЗПк; кроме этого, электродвигатель 2А и редуктор 12А с планетарной передачей, а также электродвигатель 2B и редуктор 12B с планетарной передачей расположены внутри корпуса 11 редуктора симметрично в поперечном направлении транспортного средства. Кроме этого, как показано на фиг.4, корпус 11 редуктора опирается на опоры 13а и 13b элемента рамы 13, являющейся частью конструкции кузова транспортного средства 3, а также на раму (не показана) приводного блока 1. Опоры 13а и 13b расположены с левой и правой сторон относительно центра элемента рамы 13 в поперечном направлении транспортного средства. Стрелками на фиг.4 показано направление установки приводного блока 1 в транспортном средстве 3.
Статоры 14А и 14B электродвигателей 2А и 2B крепятся, соответственно к левой и правой торцевым сторонам корпуса 11 редуктора, а кольцеобразные роторы 15А и 15B установлены с возможностью вращения с внутренних периферийных сторон в продольном направлении статоров 14А и 14B. Цилиндрические валы 16А и 16B, расположенные вокруг внешней окружности осей 10А и 10B, соединены с частями внутренней окружности роторов 15А и 15B, подобные цилиндрические валы 16А и 16B опираются на торцевые стенки 17А и 17B, а также промежуточные стенки 18А и 18B корпуса 11 редуктора при помощи подшипников 19А и 19B таким образом, чтобы они были расположены соосно осям 110A и 10B и могли вращаться относительно них. Кроме этого, на внешней окружности одной из торцевых сторон цилиндрических валов 16а и 1B, а также на торцевых стенках 17А и 17B корпуса 11 редуктора расположены датчики положения 20А и 20B, используемые для передачи информации о вращательном положении роторов 15А и 15B на исполнительный ЭБУ 9. Исполнительный ЭБУ 9 может определять скорость вращения электродвигателей 2А и 2B на основании сигналов, получаемых от датчиков положения 20А и 20B.
Кроме этого, редукторы 12А и 12B с планетарной передачей оснащены солнечными шестернями 21А и 21B, множеством планетарных шестерней 22А и 22B, зацепляющихся с солнечными шестернями 21, водилами 23А и 23B планетарных передач, на которые опираются подобные планетарные шестерни 22А и 22B, а также кольцевыми шестернями 24А и 24B, зацепляющимися с внешними периферийными сторонами планетарных шестерней 22А и 22B. Приводная мощность электродвигателей 2А и 2B передается на солнечные шестерни 21А и 21B, а приводная мощность, возникающая после редуцирования скорости, передается через водила 23А и 23B планетарной передачи.
Солнечные шестерни 21А и 21B встроены в цилиндрические валы 16А и 16B. Кроме этого, как показано на фиг.3, планетарные передачи 22А и 22B, например, являются двойными шестернями, состоящими из первых шестерней 26А и 26B большого диаметра, зацепляющихся с солнечными зубчатыми шестернями 21А и 21B, а также вторых шестерней 27А и 27B, имеющих меньшей диаметр, чем первые шестерни 26А и 26B, причем первые шестерни 26А и 26B, а также вторые шестерни 27А и 27B объединены таким образом, чтобы они были расположены соосно и со смещением в осевом направлении. Планетарные передачи 22А и 22B опираются на водила 23А и 23B планетарных передач, а аксиально внутренние торцевые части водил 23А и 23B планетарных передач проходят внутрь, в радиальном направлении, соединены при помощи шлицов с осями 10А и 10B, закреплены с возможностью вращения и опираются на промежуточные стенки 18А и 18B при помощи подшипников 33А и 33B.
Промежуточные стенки 18А и 18B выполнены с возможностью разделения посадочных мест под электродвигатели 2А и 2B для размещения электродвигателей от посадочных мест под редукторы 12А и 12B для размещения редукторов с планетарной передачей. Промежуточные стенки 18А и 18B изогнуты таким образом, чтобы осевые расстояния между ними увеличивались со стороны их внешнего диаметра к стороне их внутреннего диаметра. Кроме этого, подшипники 33A и 33B, на которые опираются водила 22А и 22B планетарной передачи, расположены со стороны внутреннего диаметра промежуточных стенок 18А и 18B, а также со стороны редукторов 12А и 12B с планетарной передачей; кроме этого, токособирательные кольца 41А и 41B статоров 14А и 14B расположены со стороны внешнего диаметра промежуточных стенок 18А и 18B и со стороны электродвигателей 2А и 2B (см. фиг.2).
Кольцевые шестерни 24А и 24B оснащены шестеренчатыми секциями 28А и 28B, поверхности внутренней окружности которых зацепляются со вторыми шестернями 27А и 27B малого диаметра; секции 29А и 29B малого диаметра меньше секций 28А и 28B шестеренчатых секций 28А и 28B и расположены таким образом, чтобы в промежуточном положении корпуса 11 редуктора они находились оппозитно друг другу; а также соединительными секциями 30A и 30B, предназначенными для соединения аксиально внутренних торцевых секций шестеренчатых секций 28А и 28B с аксиально внешними торцевыми секциями секций 29А и 29B меньшего диаметра в радиальном направлении. По данному варианту осуществления максимальный радиус кольцевой шестерни 24А, 24B выбирается таким образом, чтобы он был меньше максимального удаления первой шестерни 26А, 26B от центра первой шестерни 26А, 26B. Секции 29А и 29B малого диаметра соответственно соединяются шлицами с внутренней обоймой 51 односторонней муфты 50, рассматриваемой ниже, а кольцевые шестерни 24А и 24B выполнены таким образом, чтобы они могли вращаться вместе с внутренней обоймой 51 односторонней муфты 50.
Цилиндрические разделительные секции надежно расположены между корпусом 11 редуктора и кольцевыми шестернями 24А и 24B, гидравлические тормоза 60А и 60B, используемые в качестве тормозных средств для кольцевых шестерней 24А и 24B, расположены внутри разделительных секций таким образом, чтобы они накладывались на первые шестерни 26А и 26B в радиальном направлении, а также накладывались на вторые шестерни 27А и 27B в осевом направлении. В гидравлических тормозах 60А и 60B множество неподвижных плит 35А и 35B, соединенных шлицами с поверхностью внутренней окружности цилиндрической боковой опоры 34 внешнего диаметра, проходящие в осевом направлении со стороны внутреннего диаметра корпуса 11 редуктора, а также множество вращающихся плит 36А и 36B соединенных шлицами с поверхностями внешней окружности кольцевых шестерней 24А и 24B, расположены попеременно в осевом направлении, причем подобные плиты 35А, 35B, 36А и 36B зацепляются и освобождаются кольцеобразными поршнями 37А и 37B. Поршни 37А и 37B расположены таким образом, чтобы они могли выдвигаться и перемещаться назад внутри кольцеобразных цилиндрических камер 38А и 38B, образованных с левой и правой сторон от разделительной стенки 39, проходящей от промежуточного положения корпуса 11 к стороне его внутреннего диаметра, а боковая опора 34 внешнего диаметра и боковая опора внутреннего диаметра соединены с разделительной стенкой 39, разделяющей левые и правые части. Поршни 37А и 37B при подаче масла под давлением выдвигаются в камеры 38А и 38B цилиндров и перемещаются назад при удалении масла из камер 38А и 38B цилиндров. Гидравлические тормоза 60А и 60B соединены с масляным насосом 70, расположенным между опорами 13а и 13b вышеупомянутого элемента 13 рамы, как это показано на фиг.4.
Кроме этого, в частности, у поршней 37А и 37B имеются первые поршневые стенки 63А и 63B, а также вторые поршневые стенки 64А и 64B, проходящие в осевом направлении спереди назад, подобные поршневые стенки 63А, 63B, 64А и 64B соединены цилиндрическими продольными стенками 65А и 65B. Таким образом, кольцеобразные зазоры, открытые наружу в радиальном направлении, образованы между первыми поршневыми стенками 63А и 63B, а также вторыми поршневыми стенками 64А и 64B, кольцеобразные зазоры разделены в направлении спереди назад разделительными элементами 66А и 66B, закрепленными на внутренних продольных поверхностях внешних стенок камер 38А и 38B цилиндров. Зазоры между разделительной стенкой 39 корпуса 11 редуктора и вторыми поршневыми стенками 64А и 64B используются в качестве первых пусковых камер, в которые непосредственно подается масло под высоким давлением, а зазоры между разделительными элементами 66А и 66B и первыми поршневыми стенками 63А и 63B используются в качестве вторых пусковых камер, сообщающихся с первыми пусковыми камерами через отверстия, образованные во внутренних периферийных стенках 65А и 65B. Зазоры между вторыми поршневыми стенками 64А и 64B и разделительными элементами 66А и 66B сообщаются с атмосферой.
В гидравлических тормозах 60А и 60B масло под высоким давлением подается в первую и вторую пусковые камеры, а неподвижные плиты 35А и 35B и поворотные плиты 36 и 36B могут прижиматься друг к другу за счет давления масла, воздействующего на первые поршневые стенки 63А и 63B, а также на вторые поршневые стенки 64А и 64B. Таким образом, первые и вторые поршневые стенки 63А, 63B, 64А и 64B позволяют создавать широкие нагнетающие области в осевом направлении спереди назад. Это позволяет создавать большие сжимающие усилия для неподвижных плит 35А и 35B, а также поворотных плит 36А и 36B при сжатии радиальных областей поршней 37А и 37B.
У гидравлических тормозов 60А и 60B неподвижные плиты 35А и 35B опираются на боковую опорную секцию 34 внешнего диаметра, выступающую из корпуса 11 редуктора, а поворотные плиты 36А и 36B опираются на кольцевые шестерни 24А и 24B; поэтому когда плиты 35А и 36А, а также плиты 35B и 36B сжимаются поршнями 37А и 37B, создается тормозное усилие для фиксирования кольцевых шестерней 24А и 24B за счет фрикционного зацепления между плитами 35А и 36А, а также между плитами 35B и 36B; после того как поршни 37А и 37B расцепляются, кольцевые шестерни 24А и 24B могут свободно вращаться.
Кроме этого, разделительная секция надежно расположена между соединительными секциями 30A и 30В кольцевых шестерней 24А и 24B, расположенных оппозитно в осевом направлении, а в разделительной секции находится односторонняя муфта 50, позволяющая передавать приводную мощность на кольцевые шестерни 24А и 24B только в одном направлении и предотвращать передачу приводной мощности в другом направлении. Односторонняя муфта 50 состоит из множества расклинивающих сухарей 53, расположенных между ее внутренней обоймой 51 и внешней обоймой 52, а внутренняя обойма 51 выполнена таким образом, чтобы она вращалась вместе с секциями 29А и 29B малого диаметра кольцевых шестерней 24А и 24B за счет шлицевых соединений. Кроме этого, внешняя обойма 52 устанавливается при помощи боковой опорной секции 40 внутреннего диаметра и не вращается. Когда транспортное средство перемещается вперед, одностороння муфта 50 может зацепляться, блокируя тем самым вращение кольцевых шестерней 24А и 24B. В частности, односторонняя муфта 50 выполнена таким образом, чтобы она фиксировала или расцепляла кольцевые шестерни 24А и 24B в зависимости от направления крутящего момента, воздействующего на кольцевые шестерни 24А и 24B; обычно солнечные шестерни 21А и 21B вращаются вперед при движении транспортного средства вперед, а если на кольцевые шестерни 24А и 24B воздействует крутящий момент в обратном направлении, то вращение шестерней 24А и 24B блокируется.
Далее будет рассмотрено управление работой приводного блока 1, рассмотренного выше. На фиг.5-10 показаны расчетные графики для соответствующих положений, буквами S и С в левой части соответственно обозначены солнечная шестерня 21А редуктора 12А с планетарной передачей, соединенной с электродвигателем 2А, и водило 23А планетарной передачи, соединенной с осью 10А, а буквами S и С в правой части соответственно обозначены солнечная шестерня 21B редуктора 12B с планетарной передачей, соединенной с электродвигателем 2В, и водило 23В планетарной передачи, соединенной с осью 10B, кроме этого, буквой R обозначены кольцевые шестерни 24А и 24B, BRK обозначены гидравлические тормоза 60А и 60B, a OWC обозначена односторонняя муфта 50. При последующем описании направлением вращения солнечных шестерней 21А и 21B при движении вперед считается направление вращения вперед. Кроме этого, в верхней части каждого графика показано вращение при движении транспортного средства вперед из положения останова, а в нижней части показано вращение при движении в обратном направлении; кроме этого, стрелкой вверх обозначен крутящий момент при движении вперед, а стрелкой вниз обозначен крутящий момент при движении в обратном направлении вращения.
На фиг.5 показан расчетный график во время остановки транспортного средства 3. Поскольку электродвигатели 2А и 2B остановлены, оси 110A и 10B в этот момент также остановлены, то крутящий момент на данные компоненты не передается.
На фиг.6 показан расчетный график при движении транспортного средства 3 вперед за счет передачи крутящего момента с электродвигателей 2А и 2B приводного блока 1, то есть когда транспортное средство 3 перемещается вперед, а приводной блок 1 работает в режиме силовой передачи. Когда электродвигатели 2А и 2B используются, на солнечные шестерни 21А и 21B передается крутящий момент для движения вперед. В этот момент, как отмечалось выше, кольцевые шестерни 24А и 24B заблокированы односторонней муфтой 50, а крутящий момент, исключающий движение вперед, передается на кольцевые шестерни 24А и 24B для их вращения в противоположном направлении. Поэтому водила 23А и 23В планетарной передачи вращаются вперед и транспортное средство перемещается вперед. Сопротивление движению с осей 10А и 10B передается на водила 23А и 23В планетарной передачи в противоположном направлении вращения. Таким образом, при перемещении транспортного средства зажигание включено, а крутящий момент, создаваемый электродвигателями 2А и 2B, увеличивается, в результате чего односторонняя муфта 50 механически зацепляется, а кольцевые шестерни 24А и 24B блокируются; за счет этого транспортное средство 3 может запускаться без использования масляного насоса 70, используемого для включения гидравлических тормозов 60А и 60B. В результате можно улучшить отклик при запуске транспортного средства 3.
На фиг.7 показан расчетный график для ситуации, когда электродвигатели 2А и 2B остановлены в положении, при котором транспортное средство перемещается вперед приводным блоком 6, то есть когда приводной блок 1 работает в режиме движения накатом, а электродвигатели 2А и 2B остановлены. Когда электродвигатели 2А и 2B остановлены в положении, показанном на фиг.6, крутящий момент для продолжения движения вперед передается с осей 110A и 10B на водила 23A и 23B планетарной передачи. Соответственно крутящий момент для движения назад передается на кольцевые шестерни 24А и 24B, а односторонняя муфта 50 расцеплена. Таким образом, кольцевые шестерни 24А и 24B вращаются вхолостую со скоростью, превышающей скорость вращения водил 23А и 23B планетарной передачи. Поэтому когда рекуперация электродвигателей 2А и 2B не требуется, если кольцевые шестерни 24А и 24B не заблокированы гидравлическими тормозами 60А и 60B, электродвигатели 2А и 2B останавливаются, за счет чего можно предотвратить вращение электродвигателей 2А и 2B. В это время на электродвигатели 2А и 2B воздействует момент трогания для движения вперед, а совокупность момента трогания и крутящего момента, равная трению кольцевых шестерен 24А и 24B, становится осевыми потерями в осях 10А и 10B.
На фиг.8 показан расчетный график для ситуации, когда происходит рекуперация электродвигателей 2А и 2B при перемещении транспортного средства 3 вперед приводным блоком 6 и транспортное средство самопроизвольно замедляет движение при отключении акселератора или для ситуации, когда транспортное средство замедляет движение во время торможения при помощи тормоза, то есть когда приводной блок 1 используется в режиме движения накатом и электродвигатели 2А и 2B работают в режиме рекуперации. Когда происходит рекуперация электродвигателей 2А и 2B в положении, показанном на фиг.6, крутящий момент для продолжения движения вперед передается с осей 10А и 10B на водила 23А и 23B планетарной передачи, в результате чего крутящий момент для движения назад передается на кольцевые шестерни 24А и 24B, а односторонняя муфта 50 расцепляется. В этот момент гидравлические тормоза 60А, 60B включены, а крутящий момент для движения назад передается на кольцевые шестерни 24А, 24B, в результате чего кольцевые шестерни 24А, 24B блокируются, а крутящий момент для рекуперации при движении назад передается на электродвигатели 2А, 2B. В результате может происходить рекуперативная подзарядка электродвигателей 2А, 2B.
На фиг.9 показан расчетный график при движении транспортного средства 3 назад за счет передачи крутящего момента с электродвигателей 2А и 2B приводного блока 1, то есть когда транспортное средство перемещается назад, а приводной блок 1 работает в режиме силового привода. Когда электродвигатели 2А, 2B работают в обратном направлении, на солнечные шестерни 21А, 21B передается крутящий момент для движения назад. В этом случае крутящий момент для движения вперед передается на кольцевые шестерни 24А, 24B, а односторонняя муфта 50 расцеплена. В этот момент гидравлические тормоза 60А, 60B включены, а крутящий момент, блокирующий движение назад, передается на кольцевые шестерни 24А и 24B, в результате чего кольцевые шестерни 24А, 24B блокируются, водила 23А, 23B планетарной передачи вращаются в обратном направлении и транспортное средство перемещается назад. Сопротивление движению с осей 10А, 10B передается на водила 23А, 23B планетарной передачи в направлении вращения вперед.
На фиг.10 показан расчетный график для ситуации, когда транспортное средство 3 перемещается назад приводным блоком 6, а приводной блок 1 используется в режиме движения накатом. В этом случае крутящий момент для продолжения движения назад передается с осей 10А, 10B на водила 23А, 23B планетарной передачи; поэтому кольцевые шестерни 24А, 24B заблокированы при помощи односторонней муфты 50, крутящий момент, блокирующий движение вперед, передается на кольцевые зубчатые передачи 24А, 24B, обеспечивая перемещение в обратном направлении, а в электродвигателях 2А, 2B создаются противоэлектродвижущие силы для движения вперед.
Первый пример
На фиг.11 показано положение электродвигателей 2А, 2B и положение механизма расцепления (односторонней муфты 50 и гидравлических тормозов 60А, 60B) в режиме движения транспортного средства 3. «Front» означает приводной блок 6, приводящий передние колеса Пк, «rear» означает приводной блок 1, приводящий задние колеса Зк, «о» означает активное состояние (в том числе силовой привод и рекуперацию), а «х» означает неактивное состояние (остановку). Кроме этого «Положение МОТ» означает положение электродвигателей 2А, 2B приводного блока 1. «OWC» означает одностороннюю муфту 50, a «BRK» означает гидравлические тормоза 60А, 60B.
При остановке транспортного средства электродвигатели 2А и 2B приводного блока 1 остановлены, приводной блок 6, расположенный со стороны передних колес ПК, и приводной блок 1, расположенный со стороны задних колес Зк, остановлены, а механизм расцепления также находится в неактивном положении, как это показано на фиг.5.
Затем, после включения зажигания, при запуске электромобиля включаются электродвигатели 2А и 2B приводного блока 1 задних колес Зк. В это время, как было рассмотрено со ссылкой на 6, механизм расцепления блокируется односторонней муфтой 50, а приводная мощность электродвигателей 2А и 2B передается на оси 10А и 10B.
Затем, при ускорении, полноприводное движение осуществляется при помощи приводного блока 6, расположенного со стороны передних колес Пк, а также приводного блока 1, расположенного со стороны задних колес Зк; в это время, как показано на фиг.6, механизм расцепления блокируется односторонней муфтой 50, а приводная мощность электродвигателей 2А и 2B передается на оси 10А и 10B.
При движении в режиме электромобиля с малой и средней постоянной скоростью, поскольку электродвигатели обладают высокой эффективностью, приводной блок 6, расположенный со стороны передних колес Пк, отключен, а заднеприводное движение осуществляется за счет использования приводного блока 1, расположенного со стороны задних колес Зк. В это время, как было рассмотрено со ссылкой на 6, механизм расцепления блокируется односторонней муфтой 50, а приводная мощность электродвигателей 2А и 2B передается на оси 110A и 10B.
С другой стороны, при движении с постоянной высокой скоростью, поскольку двигатель обладает высокой эффективностью, переднеприводное движение осуществляется за счет использования приводного блока 6, расположенного со стороны передних колес Пк. В это время, как было рассмотрено со ссылкой на фиг.7, одностороння муфта 50 механизма расцепления освобождается (OWC расцеплена), а гидравлические тормоза 60А и 60B выключены, в результате чего электродвигатели 2А и 2B останавливаются.
Кроме этого, также в случае самопроизвольного замедления, как было рассмотрено со ссылкой на фиг.7, одностороння муфта 50 механизма расцепления освобождается (OWC расцеплена), гидравлические тормоза 60А и 60B выключены, в результате чего электродвигатели 2А и 2B останавливаются.
С другой стороны, при замедлении движения с рекуперацией, например, если движение осуществляется за счет приводной мощности приводного блока 6, расположенного со стороны передних колес Пк, как было подробно рассмотрено выше со ссылкой на фиг.8, односторонняя муфта 50 механизма расцепления освобождается (OWC расцеплена), гидравлические тормоза 60А и 60B выключены, в результате происходит рекуперативная подзарядка электродвигателей 2А и 2B.
При движении назад приводной блок 6, расположенный со стороны передних колес Пк, останавливается, а приводной блок 1, расположенный со стороны задних колес, используется и происходит заднеприводное движение, либо происходит полноприводное движение за счет использования приводного блока 6, расположенного со стороны передних колес Пк, а также приводного блока 1, расположенного со стороны задних колес Зк. В случае заднеприводного движения, как было подробно рассмотрено со ссылкой на фиг.9, электродвигатели 2А и 2B вращаются в обратном направлении, одностороння муфта 50 механизма расцепления освобождается (OWC расцеплена); однако, за счет использования гидравлических тормозов 60А и 60B приводная мощность электродвигателей 2А и 2B передается на оси 10А и 10B. С другой стороны, при полноприводом движении, как было рассмотрено со ссылкой на фиг. 10, механизм расцепления блокируется односторонней муфтой 50, а приводная мощность электродвигателей 2А и 2B передается на оси 10А и 10B.
Электродвигатели 2А и 2B приводного блока 1 по фиг.11 могут работать в четырех режимах: «МОТ движение», «МОТ движение назад», «МОТ остановка» и «МОТ рекуперация». На фиг.12 схематически показана компоновка рассмотренного приводного блока 1, расположенного со стороны заднего левого колеса, ЗПк.
(A) Электрические двигатели 2А, 2B находятся в режиме «МОТ движение» или «МОТ движение назад».
Когда электродвигатели 2А, 2B находятся в режиме «МОТ движение» кольцевые шестерни 24А, 24B блокируются односторонней муфтой 50, как это показано на фиг.6 и 10. Кроме этого, когда электродвигатели 2А, 2B находятся в режиме «МОТ движение назад», кольцевые шестерни 24А, 24B блокируются гидравлическими тормозами 60А, 60B, как это показано на фиг.9. Поэтому крутящий момент (приводной крутящий момент) с электродвигателей 2А, 2B передается по цепочке, как это рассмотрено ниже. Цепочка в скобках в рассматриваемой ниже цепочке обозначает реактивную силу (противодействие), возникающую из-за блокирования кольцевой шестерни 24А, 24B.
«Электрический двигатель 2А, 2B→солнечная шестерня 21А, 21B→первая шестерня 26А, 26B планетарной передачи→вторая шестерня 27А, 27В→кольцевая шестерня 24А, 24B→вторая шестерня 27А, 27В) →планетарная передача 23А, 23B→ось 10А, 10B→заднее колесо Зк».
Таким образом, в режиме «МОТ движение» или «МОТ движение назад» крутящий момент передается с солнечной шестерни 21А, 21B на первую шестерню 26А, 26B планетарной передачи 22А, 22B.
(B) Электрические двигатели 2А, 2B находятся в режиме «МОТ остановка». Когда электрические двигатели 2А, 2B находятся в режиме «МОТ остановка»
кольцевые шестерни 24А, 24B не блокируются односторонней муфтой 50 или гидравлическими тормозами 60А, 60B, как это показано на фиг.5 и 7. Поэтому крутящий момент с задних колес Зк транспортного средства 3 передается по рассматриваемой ниже цепочке.
«Задние колеса ЗК→ось 10А, 10B→планетарная передача 23А, 23B→вторая шестерня 27А, 27В планетарной передачи 22А, 22B→кольцевая шестерня 24А, 24B».
Поскольку кольцевая шестерня 24А, 24B не блокируется, кольцевая шестерня 24А, 24B вращается при очень небольшом усилии. Поэтому большая часть крутящего момента с задних колес Зк передается не на первую шестерню 26А, 26B планетарной передачи 22А, 22B, а на кольцевую шестерню 24А, 24B.
Таким образом, в режиме «МОТ остановка» крутящий момент с задних колес Зк не передается на электродвигатель 2А, 2B. Соответственно крутящий момент отсутствует между солнечной шестерней 21А, 21B и первой шестерней 26А, 26B планетарной передачи 22А, 22B.
(C) Электрические двигатели 2А, 2B находятся в режиме «МОТ рекуперация».
Когда электрические двигатели 2А, 2B находятся в режиме «МОТ рекуперация», показанном на фиг.8, кольцевые шестерни 24А, 24B блокируются гидравлическими тормозами 60А, 60B. Поэтому крутящий момент (рекуперативный крутящий момент) с электродвигателей 2А, 2B передается по рассматриваемой ниже цепочке. Цепочка в скобках в рассматриваемой ниже цепочке обозначает реактивную силу (противодействие), возникающую из-за блокирования кольцевой шестерни 24А, 24B.
«Заднее колесо ЗК→ось 10А, 10B→планетарная передача 23А, 23B→вторая шестерня 27А, 27В планетарной передачи 22А, 22B→кольцевая шестерня 24А, 24B→вторая шестерня 27А, 27В → первая шестерня 26А, 26B→солнечная шестерня 21А, 21B→электродвигатель 2А, 2B».
Таким образом, в режиме «МОТ рекуперация» крутящий момент передается с первой шестерни 26А, 26B планетарной передачи 22А, 22B на солнечную шестерню 21А, 21B.
Как отмечалось выше при изменении режима работы электродвигателя 2А, 2B с «МОТ остановка» на «МОТ движение», «МОТ движение назад» или «МОТ рекуперация» крутящий момент передается в любом направлении между солнечной шестерней 21А, 21B и первой шестерней 26А, 26B, находившейся до этого в безмоментном положении. Кроме этого, при изменении режима работы электродвигателя 2А, 2B с «МОТ движение» или «МОТ движение назад» на «МОТ рекуперация» направление передачи крутящего момента между солнечной шестерней 21А, 21B и первой шестерней 26А, 26B меняется на противоположное. Аналогичным образом при изменении режима работы электродвигателя 2А, 2B с «МОТ рекуперация» на «МОТ движение » или «МОТ движение назад» направление передачи крутящего момента между солнечной шестерней 21А, 21B и первой шестерней 26А, 26B меняется на противоположное.
Зацепление между солнечной шестерней 21А, 21B и первой шестерней 26А, 26B, показанное эллиптическими пунктирными линиями на фиг.2, обеспечивается за счет расположения шестерней оппозитно друг другу. Как отмечалось выше, между двумя шестернями, расположенными оппозитно друг другу, образуется зазор, т.н. «люфт», как это показано на фиг.23. При изменении направления крутящего момента или при передаче крутящего момента в любом направлении из безмоментного положения приводной блок 1 по одному из вариантов осуществления выполняет управление таким образом, чтобы люфт не приводил к возникновению ударов. Подобное управление не требуется, поскольку крутящий момент передается между второй шестерней 27А, 27В планетарной передачи 22А, 22B и кольцевой шестерней 24А, 24B в одинаковом направлении (вторая шестерня 27А, 27В→кольцевая шестерня 24А, 24B), вне зависимости от режима.
Ниже будет рассмотрено управление, осуществляемое приводным блоком 1 при изменении режима работы электродвигателей 2А, 2B с «МОТ остановка» на «МОТ движение». Режим работы электродвигателей 2А, 2B меняется с «МОТ остановка» на «МОТ движение», когда (а) транспортное средство 3, после остановки, начинает движение в режиме электромобиля, (b) когда транспортное средство 3, после движения с постоянной высокой скоростью, дополнительно ускоряется и когда (c) транспортное средство 3, после самопроизвольного замедления движения, ускоряется. Приводной блок 1 по одному из вариантов осуществления выполняет управление, как это рассматривается ниже, когда транспортное средство 3 движется в режимах (b) и (c), указанных выше.
На фиг.13 показан временной график с различными параметрами, когда транспортное средство 3, после движения с постоянной высокой скоростью или самопроизвольного замедления, ускоряется. Как показано на фиг.11, при движении транспортного средства 3 с высокой постоянной скоростью или самопроизвольного замедления электродвигатели 2А и 2B приводного блока 1 остановлены. Поскольку электродвигатели 2А и 2B остановлены, односторонняя муфта 50 механизма расцепления освобождена (OWC освобождена). Кроме этого, гидравлические тормоза 60А и 60B отключены. Если водитель желает ускориться в данном режиме, исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости вращения (скорости вращении электродвигателя) электродвигателей 2А и 2B до заданной скорости Nmr вращения.
Исполнительный ЭБУ 9 определяет, был ли запрос водителя об ускорении осуществлен в форме нажатия на педаль Ар акселератора, как это показано на фиг.1. Кроме этого, исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения на основании скорости транспортного средства или скорости вращения осей 10А и 10B. Кроме этого, исполнительный ЭБУ 9 определяет скорость транспортного средства на основании сигнала от датчика 117 скорости транспортного средства, как это показано на фиг.1, при этом исполнительный ЭБУ 9 определяет скорость вращения осей 110A и 10B на основании сигналов от датчиков 117а и 117b скорости транспортного средства, как это показано на фиг.1.
Когда скорость вращения электродвигателя увеличивается до значения (Nmr-A), которое на определенное значение ниже заданной скорости вращения Nmr, исполнительный ЭБУ 9 осуществляет управление электродвигателем 2А, 2B таким образом, чтобы электродвигатель создавал постоянный крутящий момент.После начала управления, обеспечивающего создание электродвигателем постоянного крутящего момента, исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена. Момент принятия решения исполнительным ЭБУ 9 о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, является моментом времени, при котором скорость вращения электродвигателя 2А, 2B достигает заданной скорости вращения Nmr или моментом времени, перед которым прошел определенный период времени с начала осуществления управления электродвигателями 2А, 2B с целью создания постоянного крутящего момента.
До тех пор пока исполнительный ЭБУ 9 не примет решение о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, кольцевая шестерня 24А, 24B редуктора 12А, 12B с планетарной передачей блокируется односторонней муфтой 50. В течение этого времени электродвигатель 2А, 2B передает крутящий момент в направлении зацепления односторонней муфты 50. После принятия решения о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, исполнительный ЭБУ 9 управляет работой электродвигателя 2А, 2B таким образом, чтобы электродвигатель создавал постоянный крутящий момент.Таким образом, крутящий момент, создаваемый электродвигателем 2А, 2B, передается на задние колеса Зк и транспортное средство 3 ускоряется.
Вышеупомянутое управление работой электродвигателя 2А, 2B приводного блока 1, осуществляемое исполнительным ЭБУ 9, будет рассмотрено при помощи блок-схемы. На фиг.14 изображена блок-схема, на которой показано управление, осуществляемое исполнительным ЭБУ 9 после получения запроса на ускорение. Как видно из фиг.14, исполнительный ЭБУ 9 определяет, был ли сделан запрос водителем об ускорении при помощи нажатия на педаль Ap акселератора (этап S101). В случае осуществления запроса обработка переходит к этапу S103.
На этапе S103 исполнительный ЭБУ 9 определяет скорость вращения осей 10А, 10B на основании сигнала, получаемого от датчиков 117а, 117b скорости вращения. Затем, по скорости вращения, исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения (этап S105). Затем исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости Nmf вращения (скорости вращении электродвигателя) электродвигателя 2А, 2B до заданной скорости Nmr вращения (этап S107). Исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя значения (Nmr-A), которое на определенную величину меньше заданной скорости Nmf вращения (этап S109).
Если соотношение Nmf≥Nmr-A соблюдается, исполнительный ЭБУ 9 осуществляет управление работой электродвигателей 2А, 2B таким образом, чтобы электродвигатель создавал постоянный крутящий момент T (этап S111). Затем исполнительный ЭБУ 9, определяет достигла ли скорость Nmf вращения электродвигателя заданной скорости Nmr вращения (этап S113). Если равенство Nmf=Nmr выполняется, то исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена (этап S115). После принятия решения о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, исполнительный ЭБУ 9 управляет работой электродвигателя 2А, 2B таким образом, чтобы электродвигатель создавал запрошенный крутящий момент. Таким образом, крутящий момент, создаваемый электродвигателем 2А, 2B, передается на задние колеса Зк и транспортное средство 3 ускоряется.
На блок-схеме, рассмотренной выше со ссылкой на фиг.14, исполнительный ЭБУ 9 определяет достигла ли скорость Nmf вращения электродвигателя заданной скорости Nmr вращения на этапе S113. Между тем, как показано на фиг.15, возможен вариант когда вместо выполнения этапа S113 исполнительный ЭБУ 9 отсчитывает время t, прошедшее с момента начала управления (этап S111), в течение которого электродвигатель 2А, 2B создает постоянный крутящий момент (этап S114), и определяет, что истекшее время соответствует заданному времени B (этап S213).
Как отмечалось выше, в первом типовом варианте осуществления управление синхронизацией скорости вращения электродвигателя 2А, 2B осуществляется в том случае, если электродвигатель 2А, 2B, после его остановки, используется в режиме движения при перемещении транспортного средства, кольцевая шестерня 24А, 24B заблокирована односторонней муфтой 50, а электродвигатель 2А, 2B создает постоянный крутящий момент, кольцевая шестерня 24А, 24B заблокирована, а крутящий момент, создаваемый электродвигателем 2А, 2B, увеличивается, крутящий момент (приводной крутящий момент) моментально передается с солнечной шестерни 21А, 21B на первую шестерню 26А, 26B планетарной передачи 22А, 22B. В этом случае сила удара из-за люфта между солнечной шестерней 21B, 21B и первой шестерней 26А, 26B будет большой. Однако, как отмечалось выше для данного варианта осуществления, поскольку выходной крутящий момент, создаваемый электродвигателем 2А, 2B во время блокирования кольцевой шестерни 24А, 24B односторонней муфтой 50, является постоянным, удар, возникающий из-за люфта между солнечной шестерней 21B, 21B и первой шестерней 26А, 26B, будет очень слабым. Другими словами, удар, возникающий из-за люфта может быть уменьшен даже в том случае, если происходит изменение направления вращения шестерней редуктора на линии силовой передачи.
Когда режим работы электродвигателя 2А, 2B меняется с «МОТ рекуперация» на «МОТ движение», блокировка кольцевой шестерни 24А, 24B при помощи гидравлического тормоза 60А, 60B меняется на блокировку при помощи односторонней муфты 50, а направление передачи крутящего момента между солнечной шестерней 21B, 21B и первой шестерней 26А, 26B меняется на противоположное. При этом приводной блок 1 по данному варианту осуществления продолжает осуществлять управление, как это показано на фиг.13.
Кроме этого, если транспортное средство после остановки движется назад, режим работы электродвигателя 2А, 2B меняется с «МОТ остановка» на «МОТ движение назад». В это время из-за люфта может возникать удар. Между тем, как отмечалось выше, вышеупомянутое управление, осуществляемое приводным блоком 1 по данному варианту осуществления, происходит во время движения транспортного средства. Таким образом, во время остановки транспортного средства или его движения назад управление приводным блоком 1 не осуществляется.
Далее будет рассмотрено управление, осуществляемое приводным блоком 1 при изменении режима работы электродвигателя 2А, 2B с «МОТ остановка» на «МОТ рекуперация». Режим работы электродвигателя 2А, 2B меняется с «МОТ остановка» на «МОТ рекуперация», когда (а) транспортное средство, после движения с постоянной высокой скоростью, замедляет движение с рекуперацией или (b) когда транспортное средство, после самопроизвольного замедления движения, замедляет движение с рекуперацией.
На фиг.16 показан временной график с различными параметрами при изменении режима движения транспортного средства 3 с самопроизвольного замедления движения на режим замедления с рекуперацией. Как показано на фиг.11, при движении транспортного средства 3 с высокой постоянной скоростью или самопроизвольного замедления электродвигатели 2А и 2B приводного блока 1 остановлены. Поскольку электродвигатели 2А и 2B остановлены, односторонняя муфта 50 механизма расцепления освобождена (OWC расцеплена). Кроме этого, гидравлические тормоза 60А и 60B выключены. Если водитель желает замедлить движение в данном режиме, исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости вращения (скорости вращении электродвигателя) электродвигателей 2А и 2B до заданной скорости Nmr вращения.
Исполнительный ЭБУ 9 определяет, был запрос водителя о замедлении движения сделан путем нажатия на педаль Br тормоза, как это показано на фиг.1. Кроме этого, исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения на основании скорости транспортного средства или скорости вращения осей 10А и 10B. Кроме этого, исполнительный ЭБУ 9 определяет скорость транспортного средства на основании сигнала от датчика 117 скорости транспортного средства, как это показано на фиг.1, при этом исполнительный ЭБУ 9 определяет скорость вращения осей 10А и 10B на основании сигналов от датчиков 117а и 117b скорости вращения, как это показано на фиг.1.
Когда скорость вращения электродвигателя увеличивается до значения (Nmr - А), которое на определенное значение ниже заданной скорости вращения Nmr, исполнительный ЭБУ 9 отдает команду о включении гидравлических тормозов 60А, 60B. После отдачи команды масляный насос 70 подает масло в гидравлический тормоз 60А, 60B, а кольцевая шестерня 24А, 24B редуктора 12А, 12B с планетарной передачей блокируется гидравлическим тормозом 60А, 60B.
Момент отдачи команды исполнительным ЭБУ 9 о включении гидравлического тормоза 60А, 60B отличается от момента блокирования кольцевой шестерни 24А, 24B гидравлическим тормозом 60А, 60B. Другими словами, для блокирования кольцевой шестерни 24А, 24B требуется определенное время из-за подачи масла в гидравлический тормоз 60А, 60B масляным насосом 70, вязкости масла и т.п.Поэтому после отдачи команды о включении гидравлического насоса 60А, 60B исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена. Момент принятия решения исполнительным ЭБУ 9 о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, является моментом времени, при котором скорость вращения электродвигателя 2А, 2B достигает заданной скорости вращения Nmr, моментом времени, при котором гидравлическое давление в гидравлическом тормозе 60А, 60B достигло заданного значения или моментом времени, перед которым прошел определенный период после отдачи команды о включении гидравлического тормоза 60А, 60B.
После того как исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, рекуперативный крутящий момент подается на электродвигатель 2А, 2B в направлении, в котором односторонняя муфта 50 не зацеплена. Таким образом, исполнительный ЭБУ 9 продолжает отдавать команды об использовании гидравлического тормоза 60А, 60B даже после принятия решения о блокировании кольцевой шестерни 24А, 24B. Поскольку кольцевая шестерня 24А, 24B продолжает оставаться блокированной при помощи гидравлического тормоза 60А, 60B, как это было рассмотрено выше, осуществляется рекуперативное торможение с использованием электродвигателя 2А, 2B, а транспортное средство 3 замедляет движение.
Вышеупомянутое управление работой электродвигателей 2А, 2B и гидравлического тормоза приводного блока 1, осуществляемое исполнительным ЭБУ 9, будет рассмотрено при помощи блок-схемы. На фиг.17 изображена блок-схема, на которой показано управление, осуществляемое исполнительным ЭБУ 9. Как показано на фиг.17, исполнительное ЭБУ 9 определяет подачу запроса водителем о замедлении движения по усилию Вг нажатия на педаль тормоза (этап S121). В случае наличия запроса о замедлении движения обработка переходит к этапу S123.
На этапе S123 исполнительный ЭБУ 9 определяет скорость вращения осей 10А, 10B на основании сигнала, получаемого от датчика 117а, 117b скорости вращения. Затем, по скорости вращения, исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения (этап S125). Затем исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости Nmf вращения (скорости вращении электродвигателя) электродвигателя 2А, 2B до заданной скорости Nmr вращения (этап S127). Исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя значения (Nmr-A), которое на определенную величину меньше заданной скорости Nmf вращения (этап S129). Если соотношение Nmf≥Nmr-A соблюдается, то исполнительный ЭБУ 9 отдает команду о включении гидравлического тормоза 60А, 60B (этап S131).
Затем исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя заданной скорости Nmr вращения (этап S133). Если равенство Nmf=Nmr выполняется, то исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена (этап S135). После того как исполнительный ЭБУ 9 определяет на этапе S135, что синхронизация скорости вращения завершена, рекуперативный крутящий момент подается на электродвигатель 2А, 2B в направлении, в котором односторонняя муфта 50 не зацеплена. Таким образом, исполнительный ЭБУ 9 продолжает отдавать команды об использовании гидравлического тормоза 60А, 60B даже после принятия решения. Соответственно, осуществляется рекуперативное торможение с использованием электродвигателя 2А, 2B и транспортное средство 3 замедляет движение.
На блок-схеме, рассмотренной выше со ссылкой на фиг.17, исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя заданной скорости Nmr вращения на этапе S133. Между тем, как показано на фиг.18, исполнительный ЭБУ 9 также может определять достижение заданной величины Pr гидравлического давления Pf в гидравлическом тормозе 60А, 60B (этап S233) иным образом, отличающимся от этапа 133. Кроме этого, как показано на фиг.19, возможен вариант когда вместо этапа S113 исполнительный ЭБУ 9 отсчитывает время t, прошедшее с момента отдачи команды (этап S131) о включении гидравлического тормоза (этап S334), и определяет, что истекшее время t соответствует определенному времени B (этап S333).
Как отмечалось выше по первому типовому варианту осуществления, управление синхронизацией скорости вращения электродвигателя 2А, 2B осуществляется в том случае, если электродвигатель 2А, 2B после остановки используется в режиме рекуперации, транспортное средство продолжает перемещаться, а кольцевая шестерня 24А, 24B постепенно блокируется гидравлическим тормозом 60А, 60B. Таким образом, рекуперативный крутящий момент постепенно передается с первой шестерни 26А, 26B планетарной передачи 22А, 22 на солнечную шестерню 21B, 21B. В этом случае удар из-за люфта между первой шестерней 26А, 26B и солнечной шестерней 21B, 21B будет очень незначительным. Другими словами, удар, возникающий из-за люфта, может быть уменьшен даже в том случае, если происходит изменение направления вращения шестерней редуктора на линии силовой передачи.
Когда режим работы электродвигателя 2А, 2B меняется с «МОТ движение» на «МОТ рекуперация», блокировка кольцевой шестерни 24А, 24B при помощи односторонней муфты 50 меняется на блокировку при помощи гидравлического тормоза 60А, 60B, а направление передачи крутящего момента между солнечной шестерней 21B, 21B и первой шестерней 26А, 26B меняется на противоположное. При этом приводной блок 1 по данному варианту осуществления продолжает осуществлять управление, как это показано на фиг.16.
По данному варианту осуществления электродвигатель 2А и редуктор 12А планетарной передачи приводного блока 1 управляют задним левым колесом ЗПк, а электродвигатель 2B и редуктор 12B с планетарной передачей приводного блока 1 управляют задним правым колесом ЗПк. Поэтому, если необходимо использовать электродвигатели 2А и 2B при повороте транспортного средства 3, исполнительный ЭБУ 9 делает разные запросы по крутящему моменту для левого и правого электродвигателей 2А и 2B. Другими словами, исполнительный ЭБУ 9 рассчитывает запрос по крутящему моменту для каждого, левого и правого электродвигателей 2А и 2B, в зависимости от режима движения транспортного средства в данный момент времени.
Между тем, когда транспортное средство 3 поворачивает один из запрашиваемых крутящих моментов для левого и правого электродвигателей 2А может быть приводным крутящим моментом, а другой - рекуперативным крутящим моментом. В этом случае исполнительный ЭБУ 9 осуществляет управление электродвигателем, для которого запрашивается приводной крутящий момент, как это показано на фиг.13, и осуществляет управление электродвигателем, для которого запрошен рекуперативный крутящий момент, как это показано на фиг.16. Кроме этого, после принятия решения о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, исполнительный ЭБУ 9 выясняет, является ли совокупная величина двух крутящих моментов больше или равной 0.
Если совокупная величина больше или равна 0, то исполнительный ЭБУ 9 прекращает отдавать команду об использовании гидравлического тормоза со стороны электродвигателя, для которого запрашивается рекуперативный крутящий момент. В этот момент рекуперативный крутящий момент передается на электродвигатель в направлении зацепления односторонней муфты 50. Поэтому кольцевая шестерня блокируется односторонней муфтой 50 даже после прекращения блокировки при помощи гидравлического тормоза. Таким образом, крутящий момент, создаваемый электродвигателем 2А, 2B, передается на задние колеса Зк и транспортное средство 3 ускоряется. С другой стороны, если совокупная величина меньше 0, то исполнительный ЭБУ 9 продолжает отдавать команды об использовании гидравлического тормоза со стороны электродвигателя, для которого запрашивается рекуперативный крутящий момент с целью продолжения блокировки кольцевой шестерни.
На фиг.20 показана блок-схема управления, осуществляемого приводным блоком 1. Как показано на фиг.20, исполнительный ЭБУ 9 определяет наличие запроса по движению для электродвигателя 2А, 2B (этап S151). В случае наличия запроса по движению обработка переходит к этапу S153. На этапе S153, на основании информации по рулению от транспортного средства 3, исполнительный ЭБУ 9 определяет, осуществляет ли движущееся транспортное средство 3 поворот. В случае поворота обработка переходит к этапу S171, в случае движения по прямой, без поворотов обработка переходит к этапу S155.
На этапе S155 исполнительный ЭБУ 9 рассчитывает запрос по крутящему моменту Tmr для каждого, левого и правого электродвигателей 2А и 2B, в зависимости от режима движения транспортного средства 3. Затем исполнительный ЭБУ 9 определяет, является ли запрос по крутящему моменту Tmr запросом по приводному движению для электродвигателей 2А, 2B (этап S157). В случае запроса по приводному движению обработка переходит к этапу S159, в случае запроса по рекуперативному движению вместо приводного движения обработка переходит к этапу S161. На этапе S159 исполнительный ЭБУ 9 осуществляет управление, рассмотренное со ссылкой на фиг.13. В противном случае на этапе S161 исполнительный ЭБУ 9 осуществляет управление, рассмотренное со ссылкой на фиг.16. В итоге исполнительный ЭБУ 9 выбирает запрашиваемый крутящий момент Tmr в соответствии с заданным крутящим моментом Tm (этап S163).
В свою очередь на этапе S171 исполнительный ЭБУ 9 рассчитывает запросы по крутящему моменту Tmr и Tlmr для левого и правого электродвигателей 2А и 2B в зависимости от режима движения транспортного средства 3. Затем исполнительный ЭБУ 9 определяет, являются ли оба запроса по крутящему моменту Tmr и Tlmr запросами по приводному движению (этап S173). В случае если оба запроса Tmr и Tlmr являются запросами по приводному движению, обработка переходит к этапу S175, если, по меньшей мере, один из них является запросом по рекуперативному движению вместо приводного движения, обработка переходит к этапу S179.
На этапе S175 исполнительный ЭБУ 9 осуществляет управление, рассмотренное со ссылкой на фиг.13. В противном случае на этапе S177 исполнительный ЭБУ 9 осуществляет управление, рассмотренное со ссылкой на фиг.13, или управление, рассмотренное со ссылкой на фиг.16, в зависимости от запрашиваемого крутящего момента для каждого электродвигателя. Затем на этапе S179 исполнительный ЭБУ 9 определяет, является ли общая сумма запрашиваемых крутящих моментов Trmr и Tlmr большей или равной 0; в случае если общая сумма больше или равна 0, обработка переходит к этапу S181, а в случае если общая сумма меньше 0, обработка переходит к этапу S183. На этапе S181 исполнительный ЭБУ 9 снимает блокировку гидравлических тормозов. В заключение, на этапе S183 исполнительный ЭБУ 9 выбирает соответствующие запрашиваемые крутящие моменты Trmr и Tlmr в соответствии с заданными крутящими моментами Trm и Tim.
Второй пример
На фиг.21 показано положение электродвигателей 2А, 2B и положение механизма расцепления (односторонней муфты 50 и гидравлических тормозов 60А, 60B) в режиме движения транспортного средства 3. «Front» означает приводной блок 6, приводящий передние колеса Пк, «rear» означает приводной блок 1, приводящий задние колеса Зк, «o» означает активное состояние (в том числе силовой привод и рекуперацию), а «х» означает неактивное состояние (остановку). Кроме этого «Положение МОТ» означает положение электродвигателей 2А, 2B приводного блока 1. «OWC» означает одностороннюю муфту 50, a «BRK» означает гидравлические тормоза 60А, 60B.
При остановке транспортного средства электродвигатели 2А и 2B приводного блока 1 остановлены, приводной блок 6, расположенный со стороны передних колес ПК, и приводной блок 1, расположенный со стороны задних колес Зк, остановлены, а механизм расцепления также находится в неактивном положении, как это показано на фиг.5.
Затем, после включения зажигания, при запуске в режиме электромобиля включаются электродвигатели 2А и 2B приводного блока 1 задних колес Зк. В это время, как было рассмотрено со ссылкой на 6, механизм расцепления блокируется односторонней муфтой 50, а приводная мощность электродвигателей 2А и 2B передается на оси 10А и 10B.
Затем, при ускорении полноприводное движение осуществляется при помощи приводного блока 6, расположенного со стороны передних колес Пк, а также приводного блока 1, расположенного со стороны задних колес Зк; в это время, как показано на фиг.6, механизм расцепления блокируется односторонней муфтой 50, а приводная мощность электродвигателей 2А и 2B передается на оси 10А и 10B.
При движении в режиме электромобиля с малой и средней постоянной скоростью, поскольку электродвигатели обладают высокой эффективностью, приводной блок 6, расположенный со стороны передних колес Пк, отключен, а заднеприводное движение осуществляется за счет использования приводного блока 1, расположенного со стороны задних колес Зк. В этот момент, как было рассмотрено со ссылкой на 6, механизм расцепления блокируется односторонней муфтой 50, а приводная мощность электродвигателей 2А и 2B передается на оси 10А и 10B.
С другой стороны, при движении с постоянной высокой скоростью, поскольку двигатель обладает высокой эффективностью, переднеприводное движение осуществляется за счет использования приводного блока 6, расположенного со стороны передних колес Пк. В этот момент, как было рассмотрено со ссылкой на фиг.7, одностороння муфта 50 механизма расцепления освобождена (OWC расцеплена), а гидравлические тормоза 60А и 60B выключены, в результате чего электродвигатели 2А и 2B останавливаются.
Кроме этого, также в случае самопроизвольного замедления, как было рассмотрено со ссылкой на фиг.7, одностороння муфта 50 механизма расцепления освобождена (OWC расцеплена), гидравлические тормоза 60А и 60B выключены, в результате чего электродвигатели 2А и 2B останавливаются.
С другой стороны, при замедлении движения с рекуперацией, например, если движение осуществляется за счет движущей силы приводного блока 6, расположенного со стороны передних колес Пк, как было подробно рассмотрено выше со ссылкой на фиг.8, одностороння муфта 50 механизма расцепления освобождена (OWC расцеплена), гидравлические тормоза 60А и 60B выключены, в результате чего происходит рекуперативная подзарядка электродвигателей 2А и 2B.
На фиг.21 и 22 будет рассмотрено управление электродвигателями 2А и 2B, а также гидравлическими тормозами 60А и 60B приводного блока 1 исполнительным ЭБУ 9 при изменении режима движения транспортного средства 3 с движения с постоянной высокой скоростью на замедление с рекуперацией. Момент времени, при котором режим движения транспортного средства 3 меняется с движения с постоянной высокой скоростью на замедление с рекуперацией, показан эллипсной пунктирной линией на фиг.21. На фиг.22 показан временной график с различными параметрами при изменении режима движения транспортного средства 3 с движения с постоянной высокой скоростью на замедление с рекуперацией.
Как показано на фиг.21, когда транспортное средство 3 движется с постоянной высокой скоростью, движение обеспечивается за счет приводного блока 6, расположенного со стороны передних колес Пк, а электродвигатели 2А и 2B приводного блока 1 остановлены. Поскольку электродвигатели 2А и 2B остановлены, односторонняя муфта 50 механизма расцепления освобождена (OWC расцеплена). Кроме этого, гидравлические тормоза 60А и 60B выключены. Таким образом, транспортное средство 3 движется в переднеприводном режиме. Если водитель желает замедлить движение в данном режиме, исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости вращения (скорости вращении электродвигателя) электродвигателей 2А и 2B до заданной скорости Nmr вращения.
Исполнительный ЭБУ 9 определяет, был ли запрос водителя о замедлении движения сделан путем нажатия на педаль Вг тормоза, как это показано на фиг.1. Кроме этого, исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения на основании скорости транспортного средства или скорости вращения осей 10А и 10B. Кроме этого, исполнительный ЭБУ 9 определяет скорость транспортного средства на основании сигнала от датчика 117 скорости транспортного средства, как это показано на фиг.1, при этом исполнительный ЭБУ 9 определяет скорость вращения осей 10А и 10B на основании сигналов от датчиков 117а и 117b скорости вращения, как это показано на фиг.1.
Если скорость вращения электродвигателя увеличивается до значения (Nmr-A), которое на определенное значение ниже заданной скорости вращения Nmr, исполнительный ЭБУ 9 отдает команду о включении гидравлических тормозов 60А, 60B. После отдачи команды масляный насос 70 подает масло в гидравлический тормоз 60А, 60B, а кольцевая шестерня 24А, 24B редуктора 12А, 12B с планетарной передачей блокируется гидравлическим тормозом 60А, 60B.
Момент отдачи команды исполнительным ЭБУ 9 о включении гидравлического тормоза 60А, 60B отличается от момента блокирования кольцевой шестерни 24А, 24B гидравлическим тормозом 60А, 60B. Другими словами, для блокирования кольцевой шестерни 24А, 24B требуется определенное время из-за подачи масла в гидравлический тормоз 60А, 60B масляным насосом 70, вязкости масла и т.п. Поэтому после отдачи команды о включении гидравлического насоса 60А, 60B исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена. Момент принятия решения исполнительным ЭБУ 9 о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, является моментом времени, при котором скорость вращения электродвигателя 2А, 2B достигает заданной скорости вращения Nmr, моментом времени, при котором гидравлическое давление в гидравлическом тормозе 60А, 60B достигло заданного значения, или моментом времени, перед которым прошел определенный период после отдачи команды о включении гидравлического тормоза 60А, 60B.
После того как исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, рекуперативный крутящий момент подается на электродвигатель 2А, 2B в направлении, в котором односторонняя муфта 50 не зацеплена. Таким образом, исполнительный ЭБУ 9 продолжает отдавать команды об использовании гидравлического тормоза 60А, 60B даже после принятия решения о продолжении блокирования кольцевой шестерни 24А, 24B. Поскольку кольцевая шестерня 24А, 24B продолжает оставаться блокированной при помощи гидравлического тормоза 60А, 60B, как это было рассмотрено выше, осуществляется рекуперативное торможение с использованием электродвигателя 2А, 2B и транспортное средство 3 замедляет движение.
Как отмечалось выше, замедление с рекуперацией транспортного средства 3 начинается через определенное время после получения запроса о замедлении движения от водителя. Однако поскольку кольцевые шестерни 24А, 24B блокируются постепенно гидравлическими тормозами 60А, 60B, удар из-за разной скорости вращения передних колес Пк и задних колес Зк не происходит.
Далее, на фиг.23 и 24 будет рассмотрено управление исполнительным ЭБУ 9 электродвигателями 2А и 2B, а также гидравлическими тормозами 60А и 60B приводного блока 1 при изменении режима движения транспортного средства 3 с самопроизвольного замедления на ускорение. На фиг.23 показано положение электродвигателей 2А, 2B и положение механизма расцепления (односторонней муфты 50 и гидравлических тормозов 60А, 60B) во время движения транспортного средства 3. Период времени, в течение которого транспортное средство 3 после самопроизвольного замедления ускоряется, показан эллипсной пунктирной линией на фиг.23. На фиг.24 показан временной график с различными параметрами, когда транспортное средство 3 после самопроизвольного замедления ускоряется.
Как показано на фиг.23, при самопроизвольном замедлении транспортного средства 3 электродвигатели 2А и 2B приводного блока 1 остановлены. Поскольку электродвигатели 2А и 2B остановлены, односторонняя муфта 50 механизма расцепления освобождена (OWC расцеплена). Кроме этого, гидравлические тормоза 60А и 60B выключены. Если водитель желает ускориться в данном режиме, исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости вращения (скорости вращении электродвигателя) электродвигателей 2А и 2B до заданной скорости Nmr вращения.
Исполнительный ЭБУ 9 определяет, был ли запрос водителя об ускорении осуществлен в форме нажатия на педаль Ap акселератора, как это показано на фиг.1. Кроме этого, исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения на основании скорости транспортного средства или скорости вращения осей 10А и 10B. Кроме этого, исполнительный ЭБУ 9 определяет скорость транспортного средства на основании сигнала от датчика 117 скорости транспортного средства, как это показано на фиг.1, при этом исполнительный ЭБУ 9 определяет скорость вращения осей 10А и 10B на основании сигналов от датчиков 117а и 117b скорости вращения, как это показано на фиг.1.
Когда скорость вращения электродвигателя увеличивается до значения (Nmr-A), которое на определенное значение ниже заданной скорости вращения Nmr, исполнительный ЭБУ 9 отдает команду о включении гидравлических тормозов 60А, 60B. После отдачи команды масляный насос 70 подает масло в гидравлический тормоз 60А, 60B, а кольцевая шестерня 24А, 24B редуктора 12А, 12B с планетарной передачей блокируется гидравлическим тормозом 60А, 60B.
Как отмечалось выше, для блокирования кольцевой шестерни 24А, 24B требуется определенное время из-за подачи масла в гидравлический тормоз 60А, 60B масляным насосом 70, вязкости масла и т.п. Поэтому после отдачи команды о включении гидравлического насоса 60А, 60B исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена. Момент принятия решения исполнительным ЭБУ 9 о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, является моментом времени, при котором скорость вращения электродвигателя 2А, 2B достигает заданной скорости вращения Nmr, моментом времени, при котором гидравлическое давление в гидравлическом тормозе 60А, 60B достигло определенного значения, или моментом времени, перед которым прошел определенный период после отдачи команды о включении гидравлического тормоза 60А, 60B.
Если исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателей 2А, 2B завершена, исполнительный ЭБУ 9 прекращает отдавать команды об использовании гидравлического тормоза 60А, 60B. В этот момент рекуперативный крутящий момент передается на электродвигатели 2А, 2B в направлении зацепления односторонней муфты 50. Поэтому кольцевая шестерня 24А, 24B блокируется односторонней муфтой 50 даже после прекращения блокировки при помощи гидравлического тормоза 60А, 60B. Таким образом, крутящий момент, создаваемый электродвигателем 2А, 2B, передается на задние колеса Зк и транспортное средство 3 ускоряется.
Как отмечалось выше, ускорение транспортного средства 3 начинается через определенное время после получения от водителя запроса об ускорении. Однако поскольку кольцевые шестерни 24А, 24B блокируются постепенно гидравлическими тормозами 60А, 60B, после чего кольцевая шестерня 24А, 24B блокируется односторонней муфтой 50, удара из-за разной скорости вращения передних колес Пк и задних колес Зк не происходит. Представленное выше описание относится к ситуации, при которой транспортное средство 3, после самопроизвольного замедления ускоряется, однако, аналогичное управление также осуществляется, когда транспортное средство 3 после движения с высокой постоянной скоростью дополнительно ускоряется.
Вышеупомянутое управление работой электродвигателей 2А, 2B и гидравлических тормозов 60А, 60B приводного блока 1, осуществляемое исполнительным ЭБУ 9, будет рассмотрено при помощи блок-схемы. На фиг.25 изображена блок-схема, на которой показано управление, осуществляемое исполнительным ЭБУ 9. Как показано на фиг.25, исполнительное ЭБУ 9 определяет подачу запроса водителем о замедлении движения по усилию Br нажатия на педаль тормоза (этап S101). В случае наличия запроса о замедлении обработка переходит к этапу S103, в случае отсутствия запроса о замедлении обработка переходит к этапу S121.
На этапе S103 исполнительный ЭБУ 9 определяет скорость вращения осей 10А, 10B на основании сигнала, получаемого от датчиков 117а, 117b скорости вращения. Затем по скорости вращения исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения (этап S105). Затем исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости Nmf вращения (скорости вращении электродвигателя) электродвигателей 2А и 2B до заданной скорости Nmr вращения (этап S107). Исполнительный ЭБУ 9, определяет достигла ли скорость Nmf вращения электродвигателя значения (Nmr-A), которое на определенную величину ниже заданной скорости Nmf вращения (этап S109). Если соотношение Nmf≥Nmr-A соблюдается, исполнительный ЭБУ 9 отдает команду о включении гидравлического тормоза 60А, 60B (этап S111).
Затем исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя заданной скорости Nmr вращения (этап S113). Если равенство Nmf=Nmr выполняется, то исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена (этап S115). После того как исполнительный ЭБУ 9 определяет на этапе S115, что синхронизация скорости вращения завершена, рекуперативный крутящий момент подается на электродвигатель 2А, 2B в направлении, в котором односторонняя муфта 50 не зацеплена. Таким образом, исполнительный ЭБУ 9 продолжает отдавать команды об использовании гидравлического тормоза 60А, 60B даже после принятия решения. Соответственно, осуществляется рекуперативное торможение с использованием электродвигателя 2А, 2B и транспортное средство 3 замедляет движение.
С другой стороны, если запрос о замедлении движения отсутствует и обработка переходит к этапу S121, исполнительный ЭБУ 9 определяет наличие запроса водителя об ускорении по нажатию на педаль Ар акселератора. В случае наличия запроса об ускорении обработка переходит к этапу S123, а в случае отсутствия запроса об ускорении обработка возвращается к этапу S101.
На этапе S123 исполнительный ЭБУ 9 определяет скорость вращения осей 10А, 10B на основании сигнала, получаемого от датчика 117а, 117b скорости вращения. Затем по скорости вращения исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения (этап S125). Затем исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости Nmf вращения (скорости вращении электродвигателя) электродвигателя 2А, 2B до заданной скорости Nmr вращения (этап S127). Исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя значения (Nmr-A), которое на определенную величину ниже заданной скорости Nmf вращения (этап S129). В случае если соотношение Nmf≥Nmr-A выполняется, исполнительный ЭБУ 9 отдает команду о включении гидравлического тормоза 60А, 60B (этап S131).
Затем исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя заданной скорости Nmr вращения (этап S133). Если равенство Nmf=Nmr выполняется, то исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена (этап S135). Затем исполнительный ЭБУ 9 прекращает отдачу команд об использовании гидравлического тормоза 60А, 60B и снимает блокировку кольцевой шестерни 24А, 24B при помощи гидравлического насоса 60А, 60B (этап S137). В этот момент электродвигатель 2А, 2B передает крутящий момент в направлении зацепления односторонней муфты 50. Поэтому кольцевая шестерня 24А, 24B блокируется односторонней муфтой 50 даже после прекращения блокировки при помощи гидравлического тормоза. Таким образом, крутящий момент, создаваемый электродвигателем 2А, 2B, передается на задние колеса Зк и транспортное средство 3 ускоряется.
На блок-схеме, рассмотренной выше со ссылкой на фиг.25, исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя заданной скорости Nmr вращения на этапах S113 и S133. Между тем, как показано на фиг.26, вместо этапов S113 и S133 исполнительный ЭБУ 9 также может определять достижение заданной величины Pr гидравлического давления Pf в гидравлическом тормозе 60А, 60B (этапы S213 и S233). Кроме этого, как показано на фиг.27, возможен вариант, когда вместо этапов S113 и S133 исполнительный ЭБУ 9 отсчитывает время Т, прошедшее с момента отдачи команды (этапы Sll 1 и S131) о включении гидравлического тормоза 60А, 60B (этапы S314 и S334), и определяет, соответствует ли истекшее время Т заданному времени В (этапы S313 и S333).
Как отмечалось выше по второму типовому варианту осуществления, если режим движения транспортного средства 3 меняется с движения с высокой постоянной скоростью на замедление с рекуперацией, поскольку кольцевые шестерни 24А, 24B блокируются гидравлическими тормозами 60А, 60B постепенно, удара из-за разной скорости вращения передних колес Пк и задних колес Зк не происходит. Кроме этого, если транспортное средство 3 после самопроизвольного замедления или движения с постоянной высокой скоростью ускоряется, поскольку кольцевые шестерни 24А, 24B блокируются гидравлическими тормозами 60А, 60B постепенно, после чего кольцевая шестерня 24А, 24B блокируется односторонней муфтой 50, удара из-за разной скорости вращения передних колес Пк и задних колес Зк не происходит. Другими словами, при зацеплении одностороннего силового передающего устройства удара из-за разной скорости вращения передних колес Пк и задних колес Зк не происходит.
Гидравлическое давление, создаваемое масляным насосом 70 в гидравлических тормозах 60А, 60B после отдачи команды исполнительным ЭБУ 9 о включении гидравлических тормозов 60А, 60B, может быть всегда высоким давлением или может меняться с низкого на высокое давление. Даже в том случае, если гидравлическое давление всегда является высоким, кольцевые шестерни 24А, 24B блокируются гидравлическими тормозами 60А, 60B постепенно. Между тем, время, необходимое для полного блокирования кольцевых шестерней 24А, 24B, будет дольше в том случае, если гидравлическое давление всегда является высоким давлением, чем в случае, если гидравлическое давление меняется с низкого на высокое давление. Таким образом, если для управления, осуществляемого исполнительным ЭБУ 9, используется блок-схема, показанная на фиг.27, то определенное время В, сравниваемое с истекшим временем Т на этапах S313 и S333, будет дольше в том случае, если гидравлическое давление всегда является высоким давлением, чем в случае, если гидравлическое давление меняется с низкого на высокое давление.
Кроме этого, по данному варианту осуществления электродвигатель 2А и редуктор 12А с планетарной передачей приводного блока 1 управляют задним левым колесом ЗПК, а электродвигатель 2B и редуктор 12B с планетарной передачей приводного блока 1 управляют задним правым колесом ЗПк. Поэтому если необходимо использовать электродвигатели 2А и 2B при повороте транспортного средства 3, исполнительный ЭБУ 9 делает разные запросы по крутящему моменту для левого и правого электродвигателей 2А и 2B. Другими словами, исполнительный ЭБУ 9 рассчитывает запрос по крутящему моменту для каждого, левого и правого электродвигателей, 2А и 2B, в зависимости от режима движения транспортного средства 3 в данный момент времени. Исполнительный ЭБУ 9 определяет, является ли совокупное значение двух запрошенных крутящих моментов больше или равным 0. Если совокупное значение больше или равно 0, исполнительный ЭБУ 9 выполняет этапы с S103 по S115, как это показано на фиг.25-27. С другой стороны, если совокупное значение будет меньше 0, то исполнительный ЭБУ 9 выполняет этапы с S123 по S137, как это показано на фиг.25-27.
Третий пример
На фиг.28 показано положение электродвигателей 2А, 2B и положение механизма расцепления (односторонней муфты 50 и гидравлического тормоза 60А, 60B) в режиме движения транспортного средства 3. «Front» означает приводной блок 6, приводящий передние колеса Пк, «rera» означает приводной блок 1, приводящий задние колеса Зк, «o» означает активное состояние (в том числе силовой привод и рекуперацию), а «х» означает неактивное состояние (остановку). Кроме этого «Положение МОТ» означает положение электродвигателей 2А, 2B приводного блока 1. «OWC» означает одностороннюю муфту 50, a «BRK» означает гидравлические тормоза 60А, 60B.
При остановке транспортного средства электродвигатели 2А и 2B приводного блока 1 остановлены, приводной блок 6, расположенный со стороны передних колес ПК, и приводной блок 1, расположенный со стороны задних колес Зк, остановлены, а механизм расцепления также находится в неактивном положении, как это показано на фиг.5.
Затем после включения зажигания, при запуске в режиме электромобиля включаются электродвигатели 2А и 2B приводного блока 1 задних колес Зк. В это время, как было рассмотрено со ссылкой на фиг.6, механизм расцепления блокируется односторонней муфтой 50, а приводная мощность электродвигателей 2А и 2B передается на оси 10А и 10B.
Далее, при ускорении полноприводное движение осуществляется при помощи приводного блока 6, расположенного со стороны передних колес Пк, а также приводного блока 1, расположенного со стороны задних колес Зк; в это время, как показано на фиг.6, механизм расцепления блокируется односторонней муфтой 50, а приводная мощность электродвигателей 2А и 2B передается на оси 10А и 10B.
При движении в режиме электромобиля с малой и средней постоянной скоростью, поскольку электродвигатели обладают высокой эффективностью, приводной блок 6, расположенный со стороны передних колес Пк, отключен, а заднеприводное движение осуществляется за счет использования приводного блока 1, расположенного со стороны задних колес Зк. В это время, как было рассмотрено со ссылкой на фиг.6, механизм расцепления блокируется односторонней муфтой 50, а приводная мощность электродвигателей 2А и 2B передается на оси 10А и 10B.
С другой стороны, при движении с постоянной высокой скоростью, поскольку двигатель обладает высокой эффективностью, переднеприводное движение осуществляется за счет использования приводного блока 6, расположенного со стороны передних колес Пк. В это время, как было рассмотрено со ссылкой на фиг.7, одностороння муфта 50 механизма расцепления освобождена (OWC расцеплена), а гидравлические тормоза 60А и 60B выключены, в результате чего электродвигатели 2А и 2B останавливаются.
Кроме этого, также в случае самопроизвольного замедления, как было рассмотрено со ссылкой на фиг.7, одностороння муфта 50 механизма расцепления освобождена (OWC расцеплена), гидравлические тормоза 60А и 60B выключены, в результате чего электродвигатели 2А и 2B останавливаются.
С другой стороны, при замедлении с рекуперацией, например в случае если движение осуществляется за счет движущей силы приводного блока 6, расположенного со стороны передних колес Пк, как было подробно рассмотрено выше со ссылкой на фиг.8, одностороння муфта 50 механизма расцепления освобождена (OWC расцеплена), гидравлические тормоза 60А и 60B выключены, в результате происходит рекуперативная подзарядка электродвигателей 2А и 2B.
На фиг.28 и 29 будет рассмотрено управление электродвигателями 2А и 2B, а также гидравлическими тормозами 60А и 60B приводного устройства исполнительным ЭБУ 9 при изменении режима движения транспортного средства 3 с движения с постоянной высокой скоростью на замедление с рекуперацией. Момент времени, при котором режим движения транспортного средства 3 меняется с движения с постоянной высокой скоростью на замедление с рекуперацией, показан эллипсной пунктирной линией на фиг.28. На фиг.29 показан временной график с различными параметрами при изменении режима движения транспортного средства 3 с движения с постоянной высокой скоростью на замедление с рекуперацией.
Как показано на фиг.28, когда транспортное средство 3 движется с постоянной высокой скоростью, движение обеспечивается при помощи приводного блока 6, расположенного со стороны передних колес Пк, а электродвигатели 2А и 2B приводного блока 1 остановлены. Поскольку электродвигатели 2А и 2B остановлены, односторонняя муфта 50 механизма расцепления освобождена (OWC расцеплена). Кроме этого, гидравлические тормоза 60А и 60B выключены. Таким образом, транспортное средство 3 движется в переднеприводном режиме. Если водитель желает замедлить движение в данном режиме, исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости вращения (скорости вращении электродвигателя) электродвигателей 2А и 2B до заданной скорости Nmr вращения.
Исполнительный ЭБУ 9 определяет, был ли запрос водителя о замедлении движения сделан путем нажатия на педаль Вг тормоза, как это показано на фиг.1. Кроме этого, исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения на основании скорости транспортного средства или скорости вращения осей 10А и 10B. Кроме этого, исполнительный ЭБУ 9 определяет скорость транспортного средства на основании сигнала от датчика 117 скорости транспортного средства, как это показано на фиг.1, при этом исполнительный ЭБУ 9 определяет скорость вращения осей 10А и 10B на основании сигналов от датчиков 117а и 117b скорости вращения, как это показано на фиг.1.
Если скорость вращения электродвигателя увеличивается до значения (Nmr-A), которое на определенное значение ниже заданной скорости вращения Nmr, исполнительный ЭБУ 9 осуществляет управление электродвигателем 2А, 2B таким образом, чтобы электродвигатель создавал постоянный крутящий момент.
После начала управления, обеспечивающего создание электродвигателем постоянного крутящего момента, исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена. Момент принятия решения исполнительным ЭБУ 9 о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, является моментом времени, при котором скорость вращения электродвигателя 2А, 2B достигает заданной скорости вращения Nmr, или моментом времени, перед которым прошел определенный период времени с начала осуществления управления электродвигателями 2А, 2B с целью создания постоянного крутящего момента.
После того как исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, исполнительный ЭБУ 9 осуществляет управление таким образом, чтобы крутящий момент, создаваемый электродвигателями 2А, 2B, был равен 0. В этот момент рекуперативный крутящий момент передается на электродвигатели 2А, 2B в направлении, в котором одностороння муфта 50 не зацеплена. Таким образом, исполнительный ЭБУ 9 отдает команду о включении гидравлического тормоза 60А, 60B для продолжения блокирования кольцевой шестерни 24А, 24B. После отдачи команды масляный насос 70 подает масло в гидравлический тормоз 60А, 60B, а кольцевая шестерня 24А, 24B редуктора 12А, 12B с планетарной передачей блокируется гидравлическим тормозом 60А, 60B. Поскольку кольцевая шестерня 24А, 24B блокируется при помощи гидравлического тормоза 60А, 60B, как это было рассмотрено выше, осуществляется рекуперативное торможение с использованием электродвигателя 2А, 2B и транспортное средство 3 замедляет движение.
Момент отдачи команды исполнительным ЭБУ 9 о включении гидравлического тормоза 60А, 60B отличается от момента блокирования кольцевой шестерни 24А, 24B гидравлическим тормозом 60А, 60B. Другими словами, для блокирования кольцевой шестерни 24А, 24B требуется определенное время из-за подачи масла масляным насосом 70 в гидравлические тормоза 60А, 60B, вязкости масла и т.п.
Как было рассмотрено по варианту осуществления выше, гидравлические тормоза 60А, 60B используются, когда электродвигатели создают постоянный крутящий момент. Если гидравлические тормоза 60А, 60B используются в то время как рекуперативный крутящий момент, создаваемый электродвигателем 2А, 2B, увеличивается, то крутящий момент передается мгновенно и в движущемся транспортном средстве 3 возникает удар. Однако, как отмечалось выше в третьем типовом варианте осуществления, при использовании гидравлических тормозов 60А, 60B механизм расцепления блокируется односторонней муфтой 50. В это время скорость вращения электродвигателей 2А, 2B синхронизируется, а кольцевые шестерни 24А, 24B не вращаются, за счет этого при зацеплении гидравлических тормозов 60А, 60B и во время рекуперативного управления электродвигателями 2А, 2B удара не происходит.
Далее, на фиг.30 и 31 будет рассмотрено управление исполнительным ЭБУ 9 электродвигателями 2А и 2B приводного блока 1 для ситуации, когда транспортное средство 3 после самопроизвольного замедления ускоряется. На фиг.30 показано положение электродвигателей 2А, 2B и положение механизма расцепления (односторонней муфты 50 и гидравлических тормозов 60А, 60B) во время движения транспортного средства 3. Период времени, в течение которого транспортное средство 3 после самопроизвольного замедления ускоряется, показан эллипсной пунктирной линией на фиг.30. На фиг.31 показан временной график с различными параметрами, когда транспортное средство 3 после самопроизвольного замедления ускоряется.
Как показано на фиг.30, при самопроизвольном замедлении транспортного средства 3 электродвигатели 2А и 2B приводного блока 1 остановлены. Поскольку электродвигатели 2А и 2B остановлены, односторонняя муфта 50 механизма расцепления освобождена (OWC расцеплена). Кроме этого, гидравлические тормоза 60А и 60B выключены. Если водитель желает ускориться в данном режиме, исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости вращения (скорости вращении электродвигателя) электродвигателей 2А и 2B до заданной скорости Nmr вращения.
Исполнительный ЭБУ 9 определяет, был запрос водителя об ускорении осуществлен в форме нажатия на педаль Ар акселератора, как это показано на фиг.1. Кроме этого, исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения на основании скорости транспортного средства или скорости вращения осей 10А и 10B. Кроме этого, исполнительный ЭБУ 9 определяет скорость транспортного средства на основании сигнала от датчика 117 скорости транспортного средства, как это показано на фиг.1, при этом исполнительный ЭБУ 9 определяет скорость вращения осей 10А и 10B на основании сигналов от датчиков 117а и 117b скорости вращения, как это показано на фиг.1.
Когда скорость вращения электродвигателя увеличивается до значения (Nmr - А), которое на определенное значение ниже заданной скорости вращения Nmr, исполнительный ЭБУ 9 осуществляет управление электродвигателем 2А, 2B таким образом, чтобы электродвигатель создавал постоянный крутящий момент. После начала управления, обеспечивающего создание электродвигателем постоянного крутящего момента, исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена. Момент принятия решения исполнительным ЭБУ 9 о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, является моментом времени, при котором скорость вращения электродвигателя 2А, 2B достигает заданной скорости вращения Nmr, или моментом времени, перед которым прошел определенный период времени с начала осуществления управления электродвигателями 2А, 2B с целью создания постоянного крутящего момента.
До тех пор, пока исполнительный ЭБУ 9 не примет решение о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, кольцевая шестерня 24А, 24B редуктора 12А, 12B с планетарной передачей блокируется односторонней муфтой 50. В течение этого времени электродвигатели 2А, 2B передают крутящий момент в направлении зацепления односторонней муфты 50. После принятия решения о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, исполнительный ЭБУ 9 управляет работой электродвигателя 2А, 2B таким образом, чтобы электродвигатель создавал запрошенный крутящий момент. Таким образом, крутящий момент, создаваемый электродвигателем 2А, 2B, передается на задние колеса Зк и транспортное средство 3 ускоряется.
Как было рассмотрено по варианту осуществления выше, кольцевые шестерни 24А, 24B блокируются односторонней муфтой 50, пока электродвигатели 2А, 2B создают постоянный крутящий момент. В случае блокировки кольцевых шестерней 24А, 24B при увеличении крутящего момента, создаваемого электродвигателями 2А, 2B, крутящий момент передается мгновенно на задние колеса Зк и в движущемся транспортном средстве 3 возникает удар. Однако, как отмечалось выше по третьему типовому варианту осуществления, поскольку крутящий момент, создаваемый электродвигателями 2А, 2B, является постоянным при блокировке кольцевой шестерни 24А, 24B односторонней муфтой 50, удара не происходит. Представленное выше описание относится к ситуации, при которой транспортное средство 3, после самопроизвольного замедления, ускоряется, однако, аналогичное управление также осуществляется, когда транспортное средство 3, после движения с высокой постоянной скоростью, дополнительно ускоряется.
Вышеупомянутое управление работой электродвигателей 2А, 2B и гидравлических тормозов 60А, 60B приводного блока 1, осуществляемое исполнительным ЭБУ 9, будет рассмотрено при помощи блок-схемы. На фиг.32. изображена блок-схема, на которой показано управление, осуществляемое исполнительным ЭБУ 9. Как показано на фиг.32, исполнительное ЭБУ 9 определяет подачу запроса водителем о замедлении движения по усилию Br нажатия на педаль тормоза (этап S101). В случае наличия запроса о замедлении обработка переходит к этапу S103, в случае отсутствия запроса о замедлении обработка переходит к этапу S121.
На этапе S103 исполнительный ЭБУ 9 определяет скорость вращения осей 10А, 10B на основании сигнала, получаемого от датчиков 117а, 117b скорости вращения. Затем по скорости вращения исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения (этап S105). Затем исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости Nmf вращения (скорости вращении электродвигателя) электродвигателей 2А и 2B до заданной скорости Nmr вращения (этап S107). Исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя значения (Nmr-A), которое на определенную величину ниже заданной скорости Nmf вращения (этап S109).
Если соотношение Nmf≥Nmr-A соблюдается, исполнительный ЭБУ 9 осуществляет управление работой электродвигателя 2А, 2B таким образом, чтобы электродвигатель создавал постоянный крутящий момент T (этап S111). Кроме этого, исполнительный ЭБУ 9 отдает команду о включении гидравлического тормоза 60А, 60B (этап S113). Затем исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя заданной скорости Nmr вращения (этап S115). Если равенство Nmf=Nmr выполняется, то исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена (этап S117). После того как исполнительный ЭБУ 9 определяет на этапе S115, что синхронизация скорости вращения завершена, рекуперативный крутящий момент подается на электродвигатель 2А, 2B в направлении, в котором односторонняя муфта 50 не зацеплена. Таким образом, исполнительный ЭБУ 9 продолжает отдавать команды об использовании гидравлического тормоза 60А, 60B даже после принятия решения. Соответственно, осуществляется рекуперативное торможение с использованием электродвигателя 2А, 2B и транспортное средство 3 замедляет движение.
С другой стороны, если запрос о замедлении движения отсутствует и обработка переходит к этапу S121, исполнительный ЭБУ 9 определяет наличие запроса от водителя по нажатию на педаль Ар акселератора. В случае наличия запроса об ускорении обработка переходит к этапу S123, в случае отсутствия запроса об ускорении обработка возвращается к этапу S101.
На этапе S123 исполнительный ЭБУ 9 определяет скорость вращения осей 10А, 10B на основании сигнала, получаемого от датчика 117а, 117b скорости вращения. Затем по скорости вращения исполнительный ЭБУ 9 определяет заданную скорость Nmr вращения (этап S125). Затем исполнительный ЭБУ 9 отдает команду (команду о синхронизации скорости вращения) об увеличении скорости Nmf вращения (скорости вращении электродвигателя) электродвигателя 2А, 2B до заданной скорости Nmr вращения (этап S127). Исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя значения (Nmr-A), которое на определенную величину ниже заданной скорости Nmf вращения (этап S129).
Если соотношение Nmf≥Nmr-A соблюдается, то исполнительный ЭБУ 9 управляет работой электродвигателей 2А, 2B таким образом, чтобы электродвигатель создавал постоянный крутящий момент T (этап S131). Затем исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя заданной скорости Nmr вращения (этап S133). Если равенство Nmf=Nmr выполняется, то исполнительный ЭБУ 9 определяет, что синхронизация скорости вращения электродвигателя 2А, 2B завершена (этап S135). После принятия решения о том, что синхронизация скорости вращения электродвигателя 2А, 2B завершена, исполнительный ЭБУ 9 управляет работой электродвигателя 2А, 2B таким образом, чтобы электродвигатель создавал постоянный крутящий момент. Таким образом, крутящий момент, создаваемый электродвигателем 2А, 2B, передается на задние колеса Зк и транспортное средство 3 ускоряется.
На блок-схеме, рассмотренной выше со ссылкой на фиг.32, исполнительный ЭБУ 9 определяет, достигла ли скорость Nmf вращения электродвигателя заданной скорости Nmr вращения на этапах S115 и S133. Между тем, как показано на фиг.33, возможен вариант когда вместо этапов S115 и S133 исполнительный ЭБУ 9 отсчитывает время t, прошедшее с момента начала управления (этапы S111 и S131), в течение которого электродвигатель 2А, 2B создает постоянный крутящий момент T (этапы S316 и S334), и определяет, что истекшее время соответствует заданному времени В (этапы S315 и S333).
Как отмечалось выше по третьему типовому варианту осуществления, при изменении режима движения транспортного средства 3 с движения с постоянной высокой скоростью на замедление с рекуперацией, поскольку гидравлический тормоз 60А, 60B включен когда электродвигатель 2А, 2B создает постоянный крутящий момент, удара в транспортном средстве 3 не происходит.Кроме этого, когда транспортное средство 3 после самопроизвольного замедления или движения с постоянной высокой скоростью ускоряется, поскольку кольцевая шестерня 24А, 24B заблокирована односторонней муфтой 50 когда электродвигатель 2А, 2B создает постоянный крутящий момент, удара в транспортном средстве 3 не происходит. Другими словами, удар, возникающий при включении одностороннего силового передающего устройства или тормоза во время движения транспортного средства, можно уменьшить.
Кроме этого, по данному варианту осуществления электродвигатель 2А и редуктор 12А с планетарной передачей приводного блока 1 управляют задним левым колесом ЗПК, а электродвигатель 2B и редуктор 12B с планетарной передачей приводного блока 1 управляют задним правым колесом ЗПк. Поэтому если необходимо использовать электродвигатели 2А и 2B при повороте транспортного средства 3, исполнительный ЭБУ 9 формирует разные запросы по крутящему моменту для левого и правого электродвигателей 2А и 2B. Другими словами, исполнительный ЭБУ 9 рассчитывает запрашиваемый крутящий момент для каждого, левого и правого, электродвигателя 2А и 2B. Исполнительный ЭБУ 9 определяет, является ли совокупное значение двух запрошенных крутящих моментов равным или больше 0. В случае если совокупное значение больше или равно 0, исполнительный ЭБУ 9 выполняет этапы с S103 по S115, как это показано на фиг.32 и 33. С другой стороны, если совокупное значение будет меньше 0, то исполнительный ЭБУ 9 выполняет этапы с S123 по S135, как это показано на фиг.32 и 33.
В вышеупомянутом приводном блоке 1 два электродвигателя 2А и 2B, а также два редуктора 12А и 12B с планетарной передачей соответственно взаимодействуют с левым и правым задними колесами Зк. Между тем, как показано на фиг.34, также может использоваться компоновка, при которой один электродвигатель 2 и один редуктор 12 с планетарной передачей являются общими для левого и правого задних колес Зк. В этом случае между электродвигателем 2 и осями используется дифференциальный механизм, позволяющий транспортному средству 3 поворачивать.
Хотя настоящее изобретение было подробно рассмотрено на примере конкретных вариантов его осуществления, специалистам в данной области техники будет очевидно, что настоящее изобретение допускает изменения и модификации, не выходящие за его объем и сущность.
Настоящая заявка основана на японской патентной заявке №2009-180059, поданной 31 июля 2009 года, японской патентной заявке №2009-180060, поданной 31 июля 2009 года, а также на японской патентной заявке №2009-180062, поданной 31 июля 2009 года, содержание которых включено здесь по ссылке.
Используемые цифровые и буквенные обозначения:
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2492068C1 |
| СИСТЕМА ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533956C2 |
| ПРИВОДНОЕ УСТРОЙСТВО И ТРАНСПОРТНОЕ СРЕДСТВО, НА КОТОРОМ ОНО ИСПОЛЬЗУЕТСЯ | 2010 |
|
RU2502001C2 |
| ГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2532039C1 |
| ТРАНСПОРТНАЯ ПРИВОДНАЯ СИСТЕМА | 2010 |
|
RU2510337C2 |
| ТОРМОЗНОЕ УСТРОЙСТВО ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2011 |
|
RU2587368C2 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2671115C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2667117C2 |
| УСТРОЙСТВО С ПОДВИЖНЫМ СИЛОВЫМ ЦИЛИНДРОМ ДЛЯ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ЛОПАТКАМИ ВЕНТИЛЯТОРА ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 2010 |
|
RU2523515C2 |
| АВТОМОБИЛЬНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ УСТРОЙСТВОМ | 2008 |
|
RU2434768C2 |

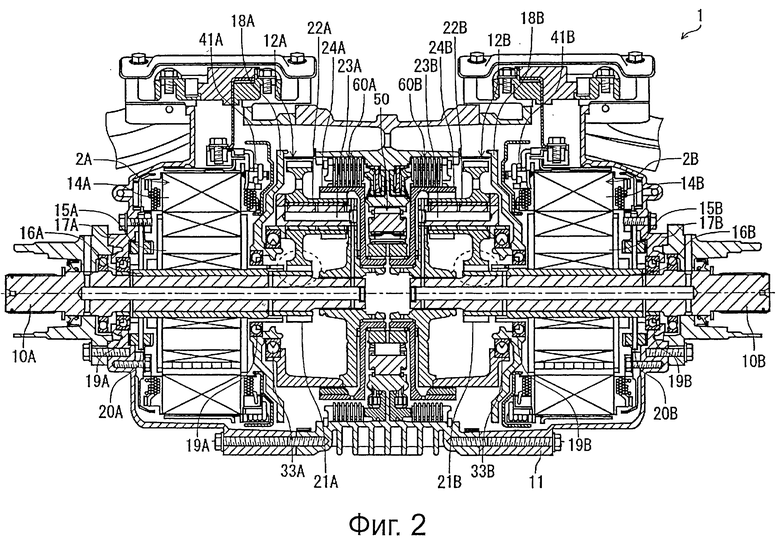
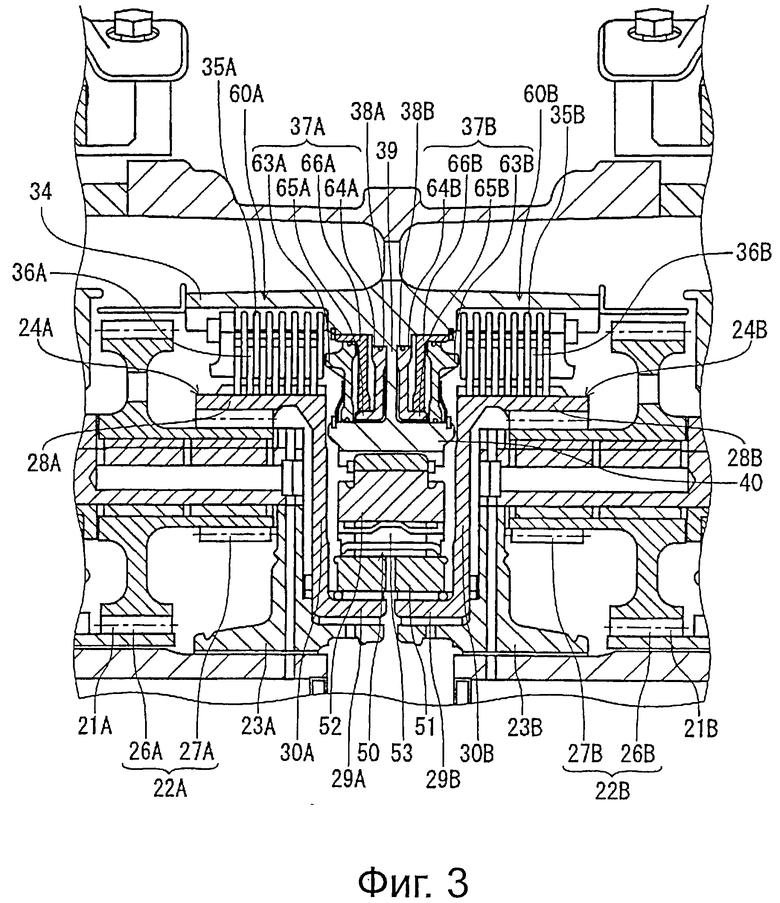
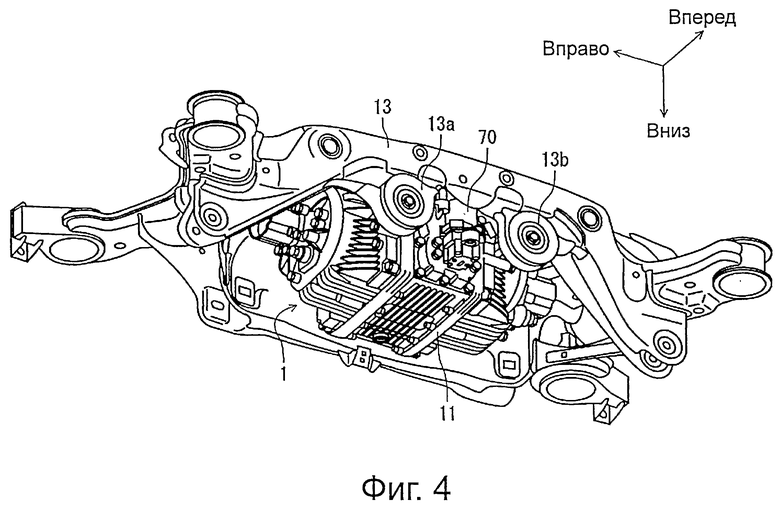
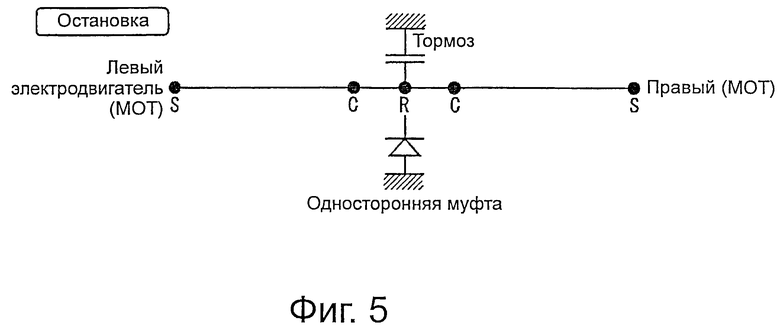
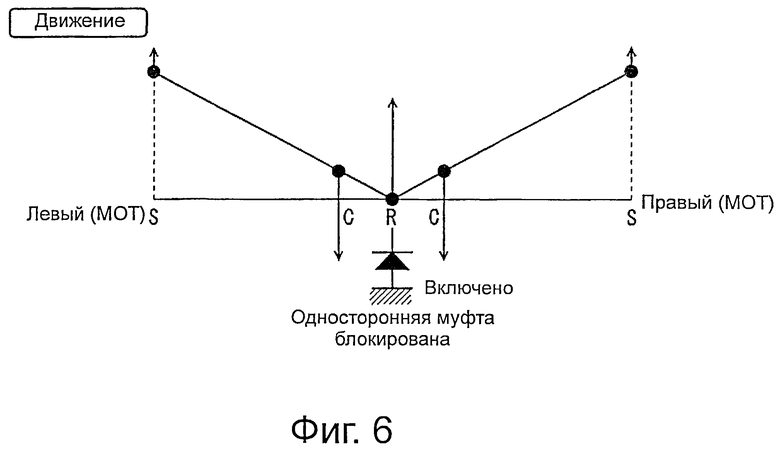
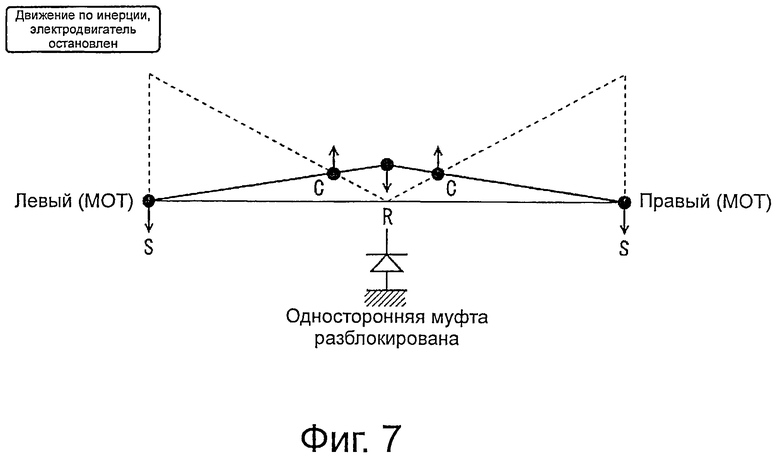
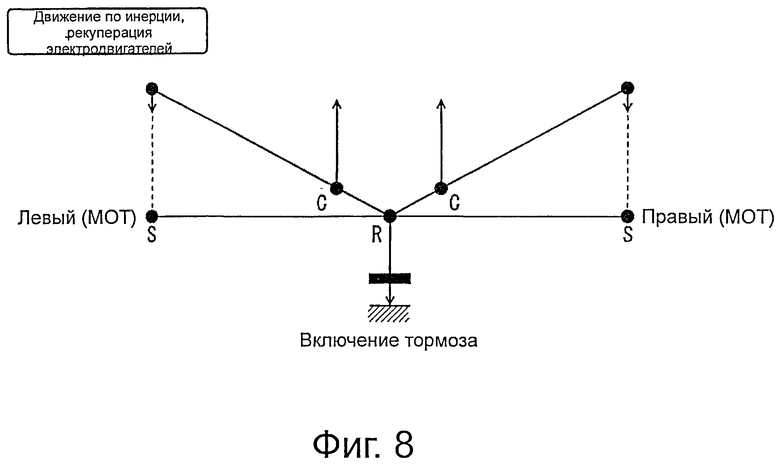
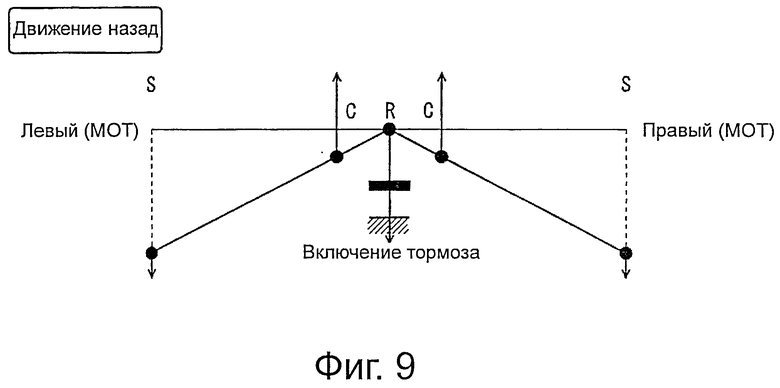
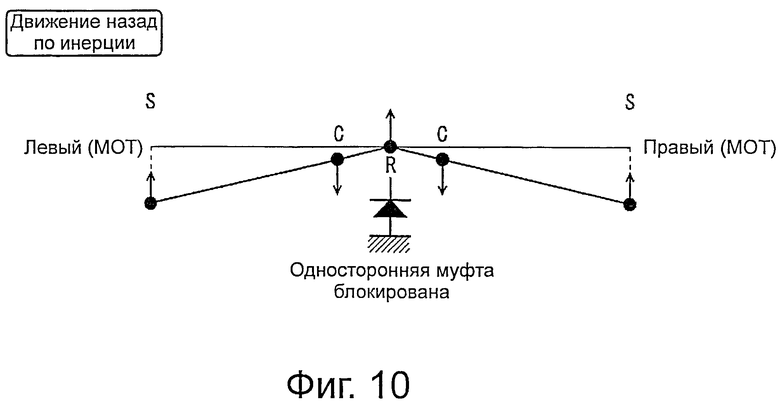
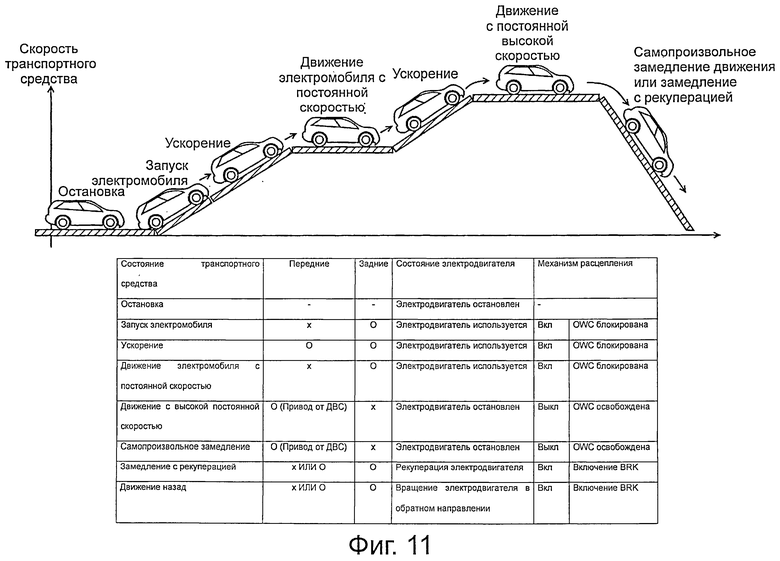
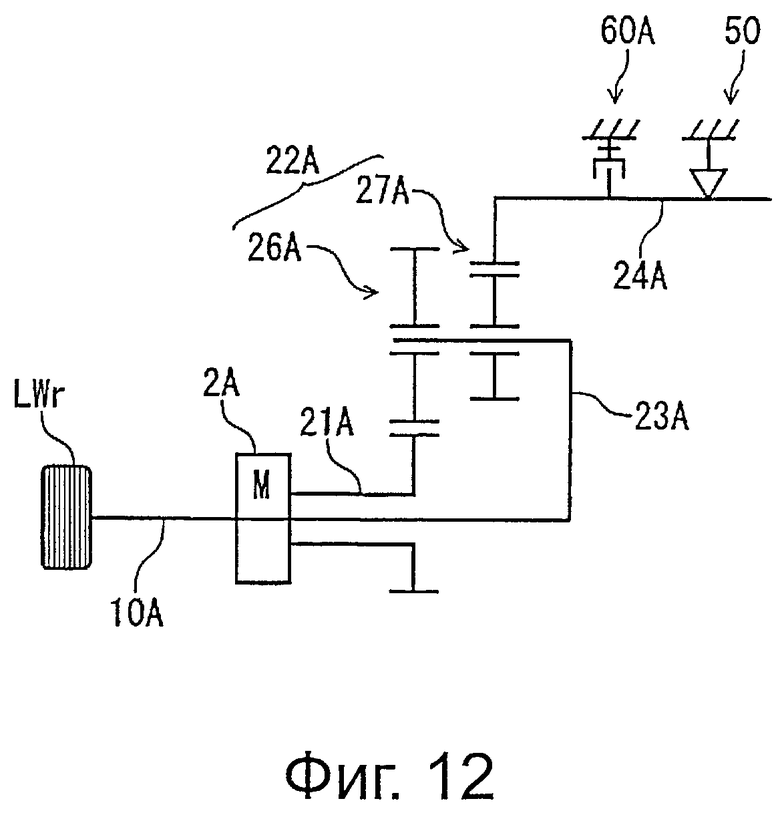
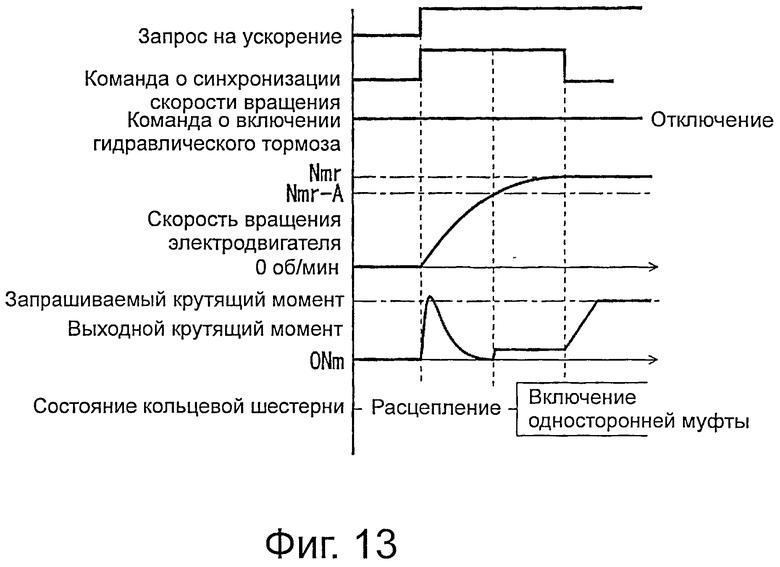
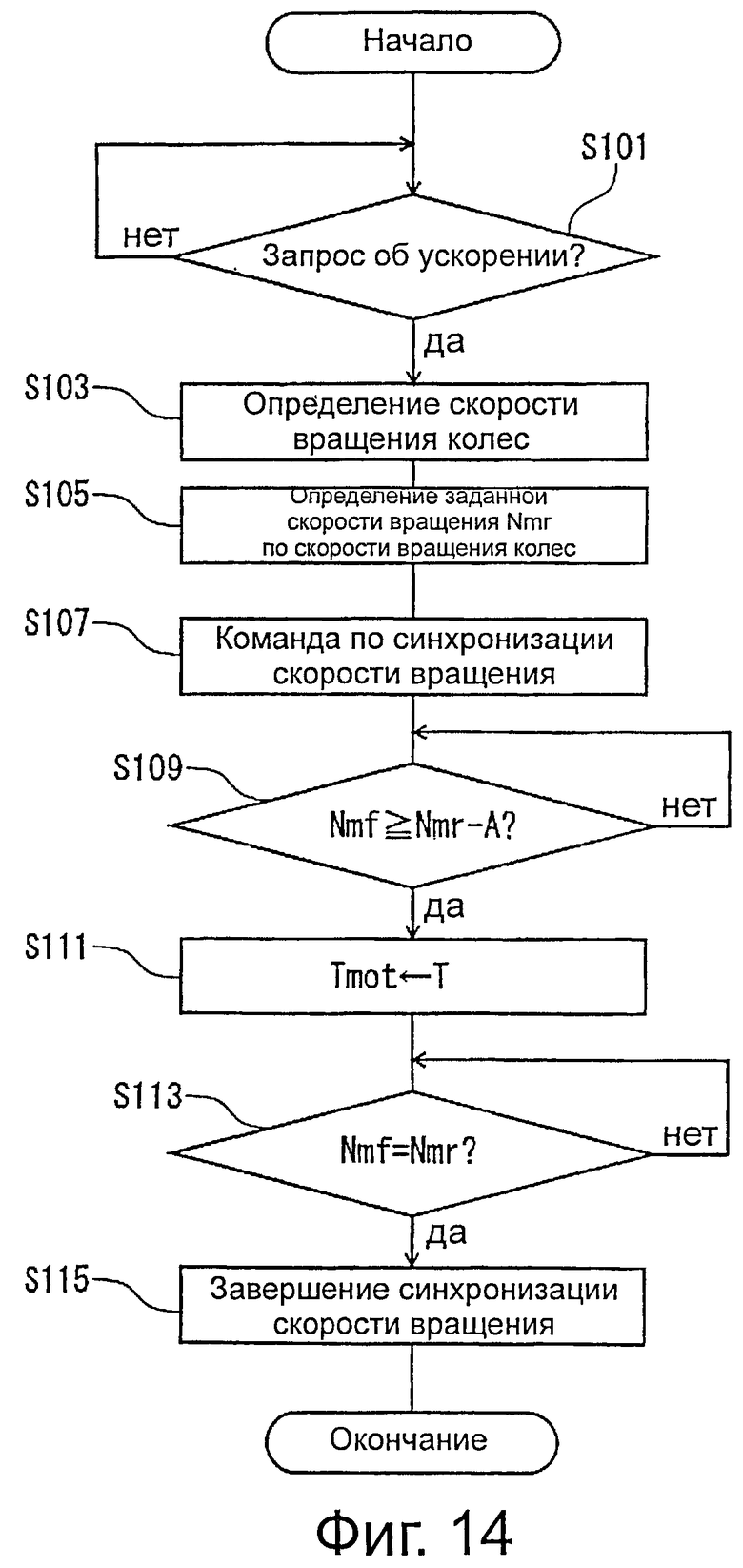
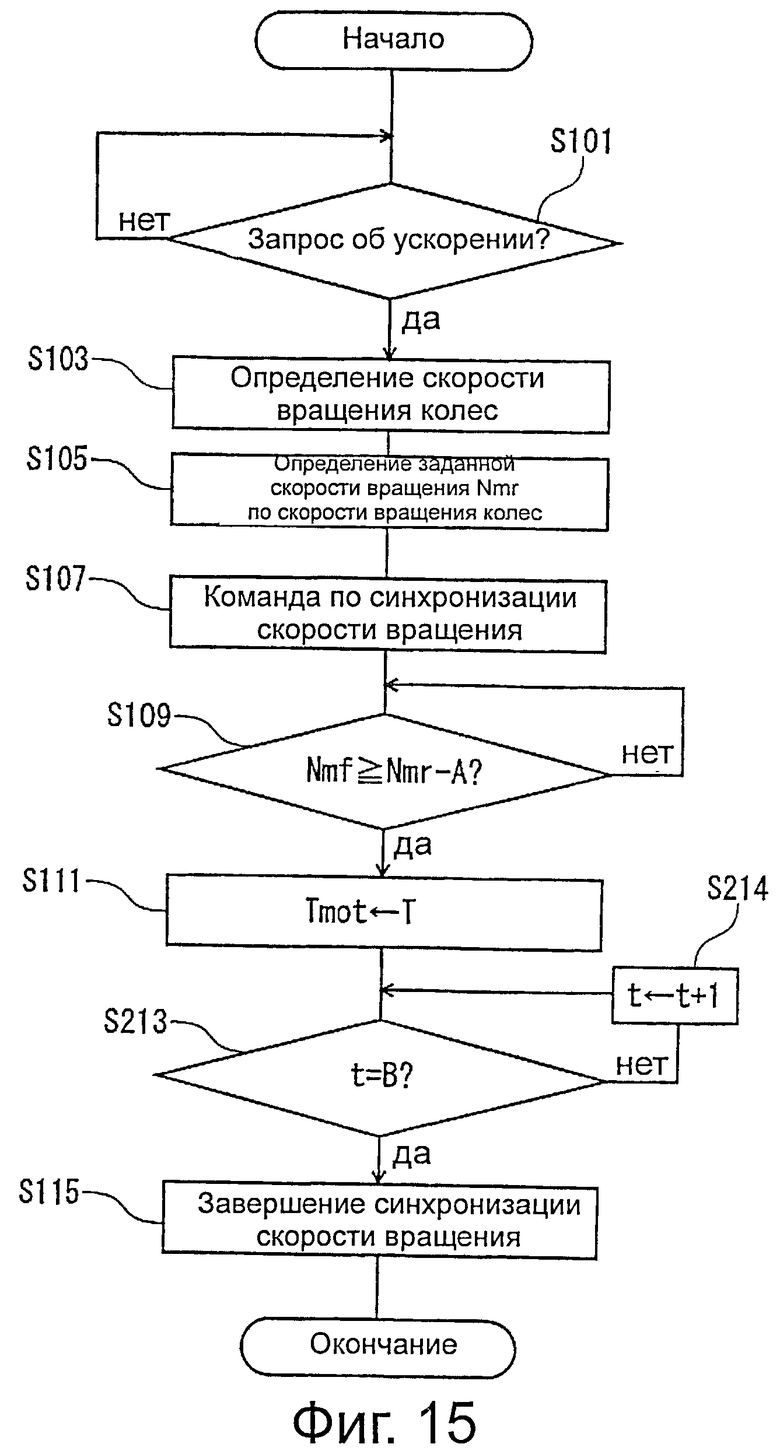
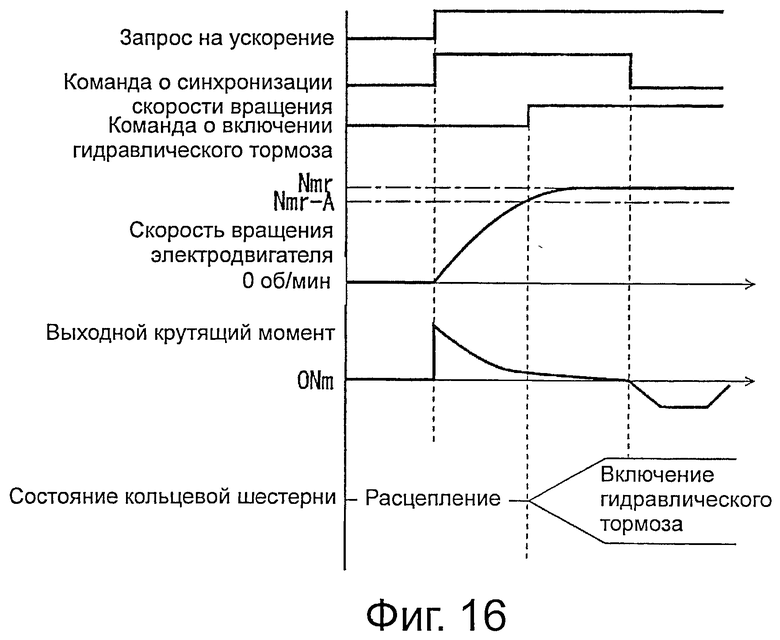
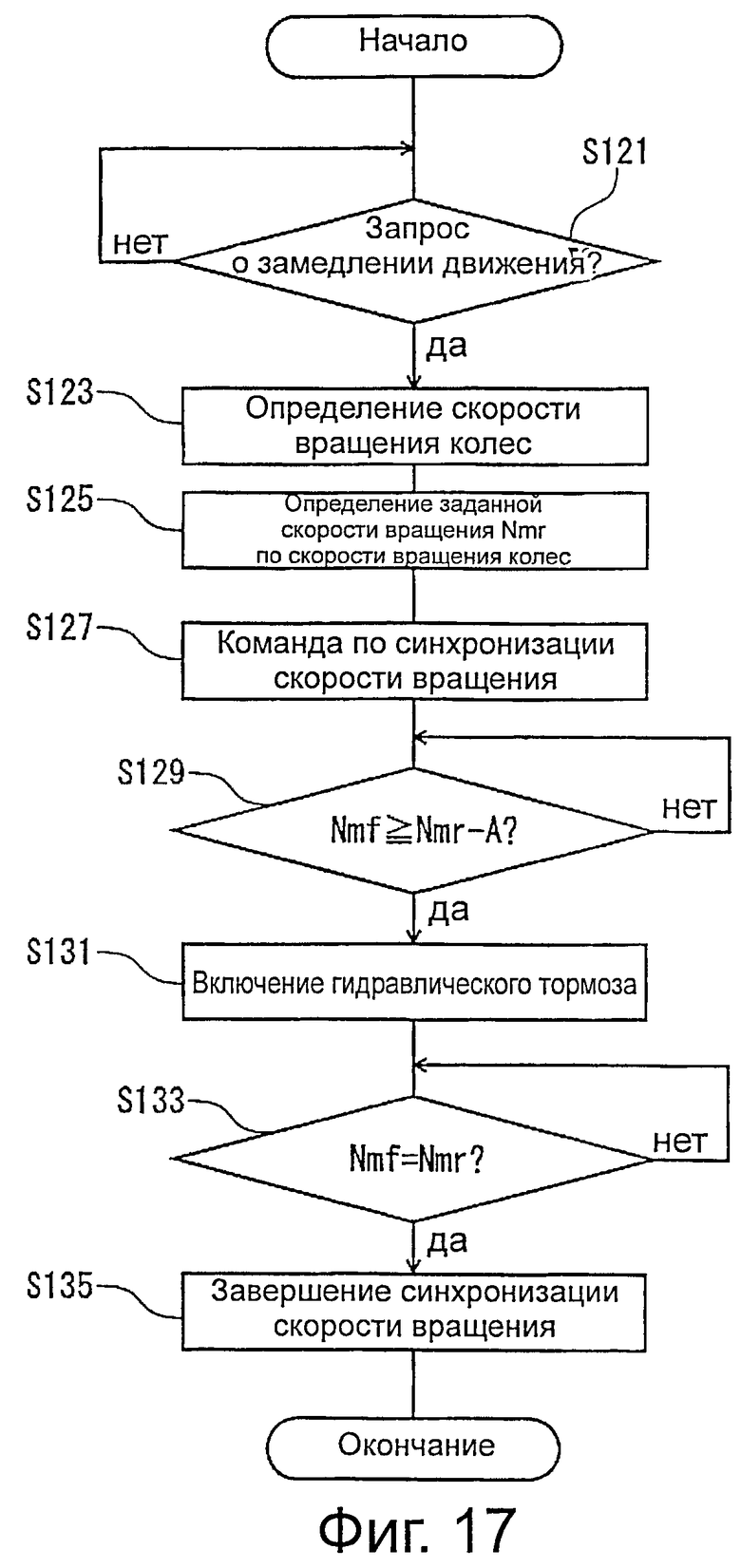
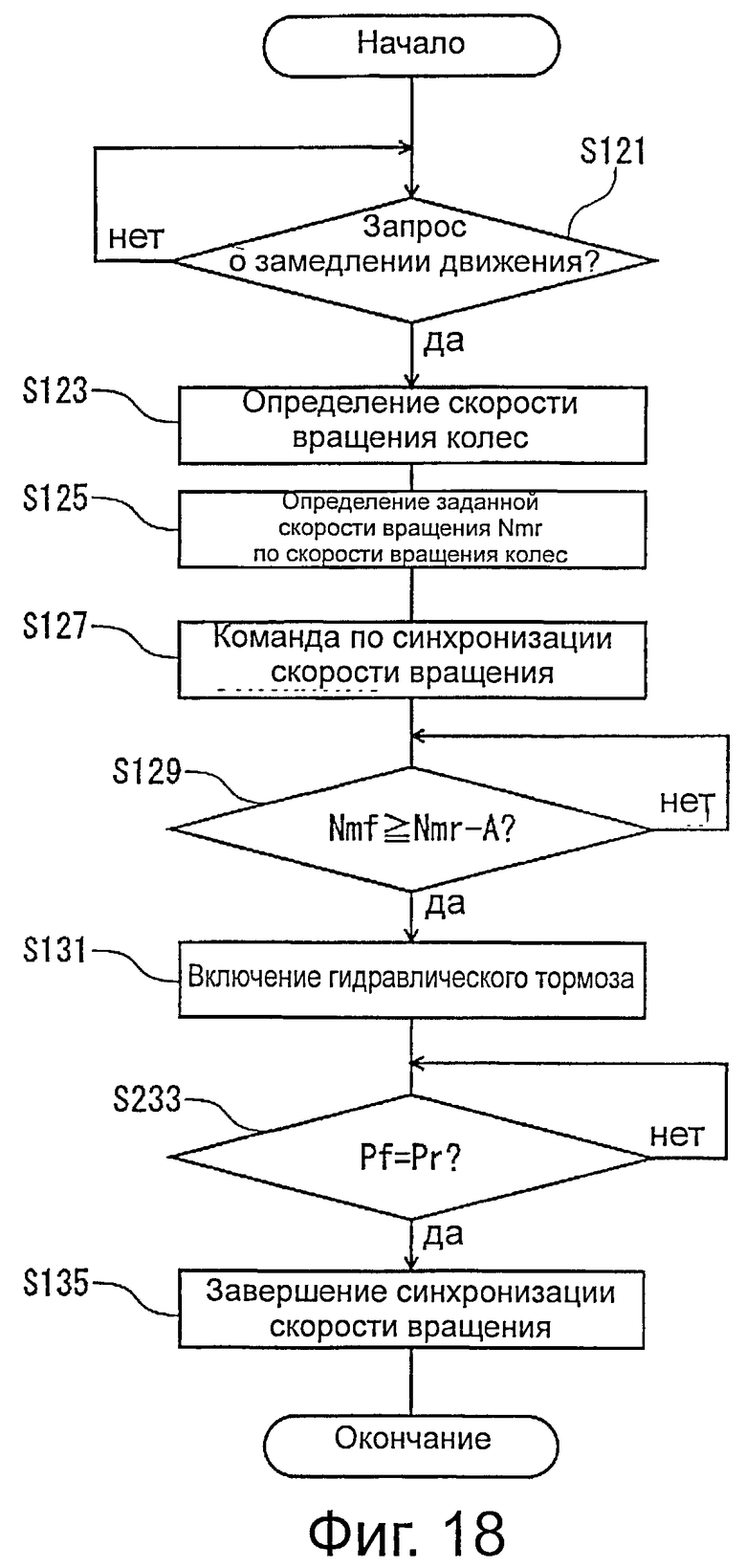
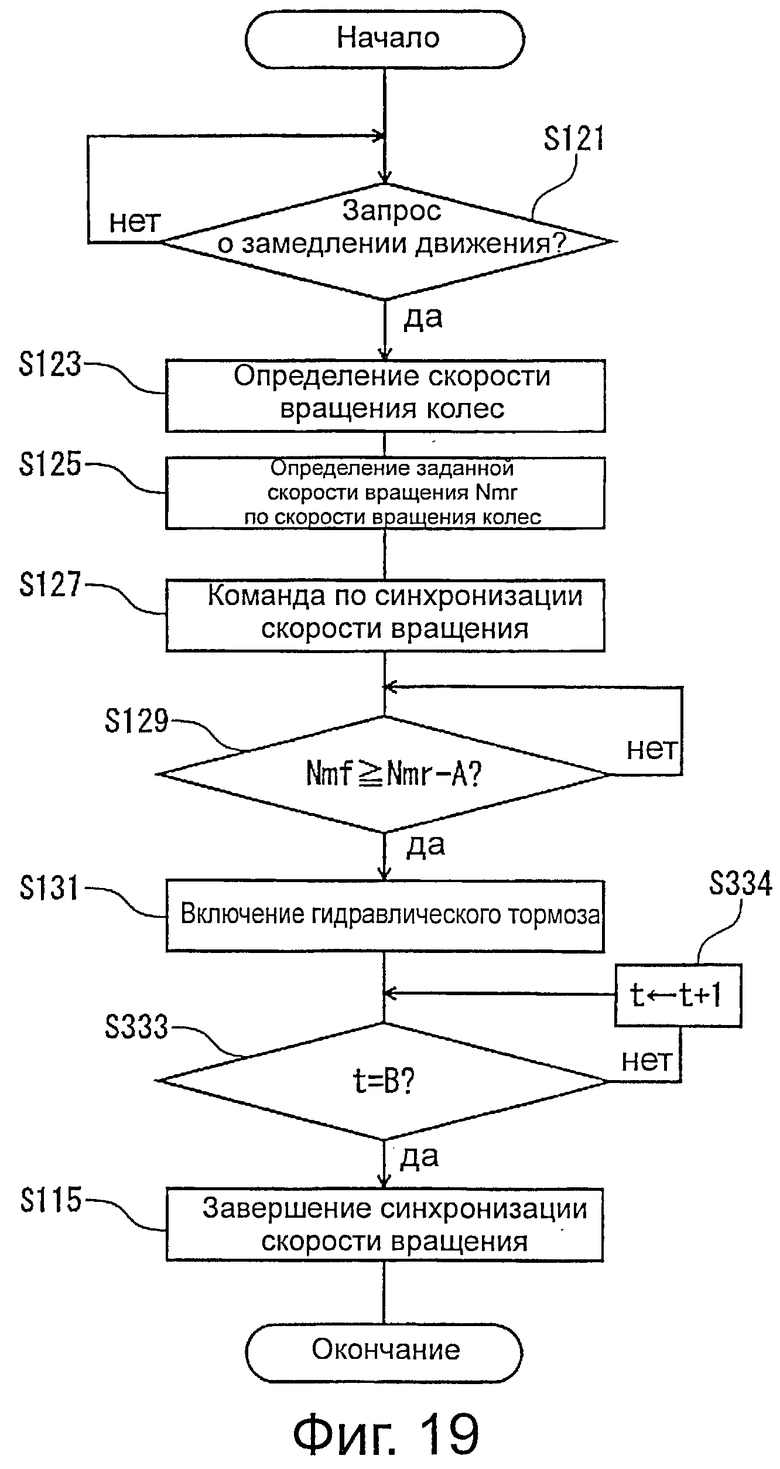
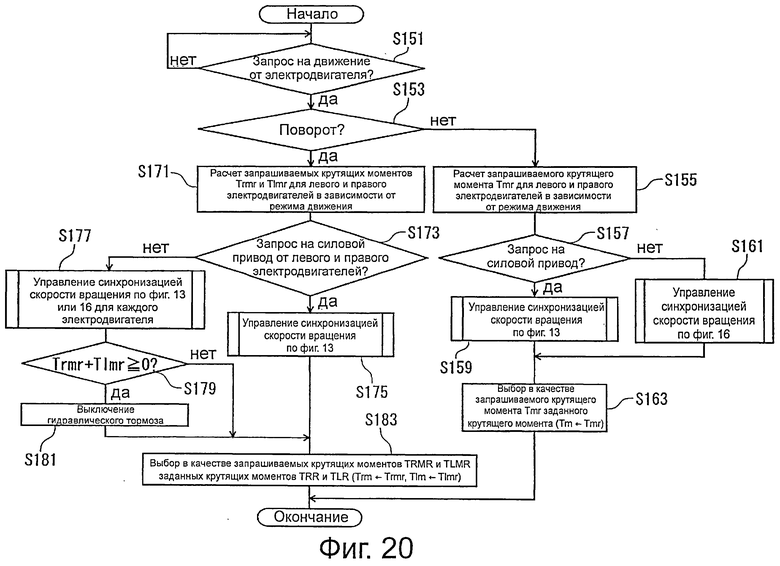
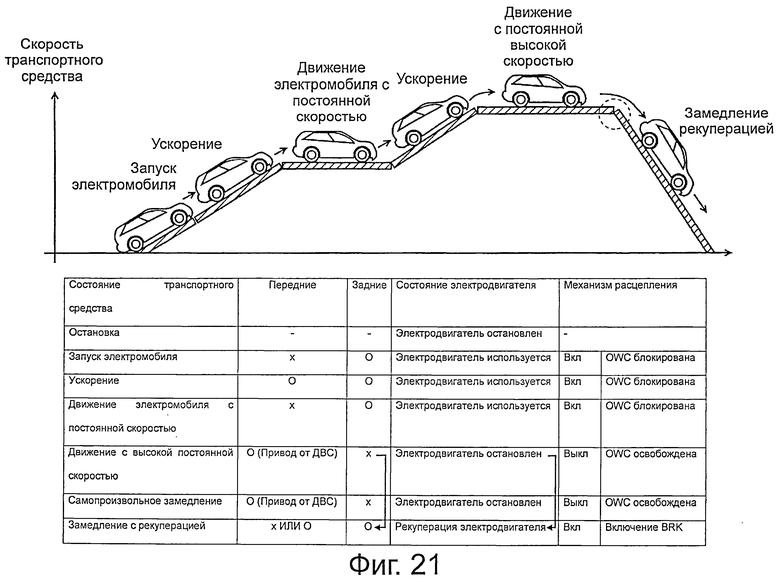
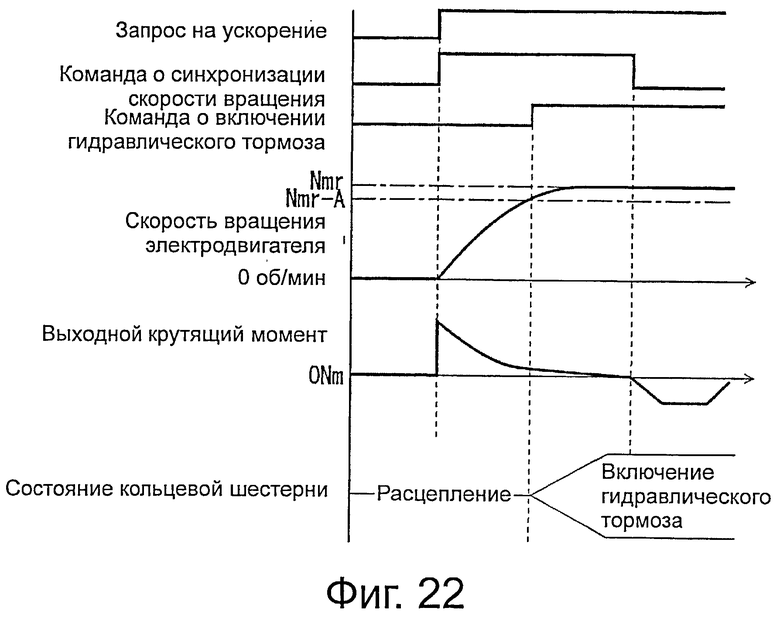
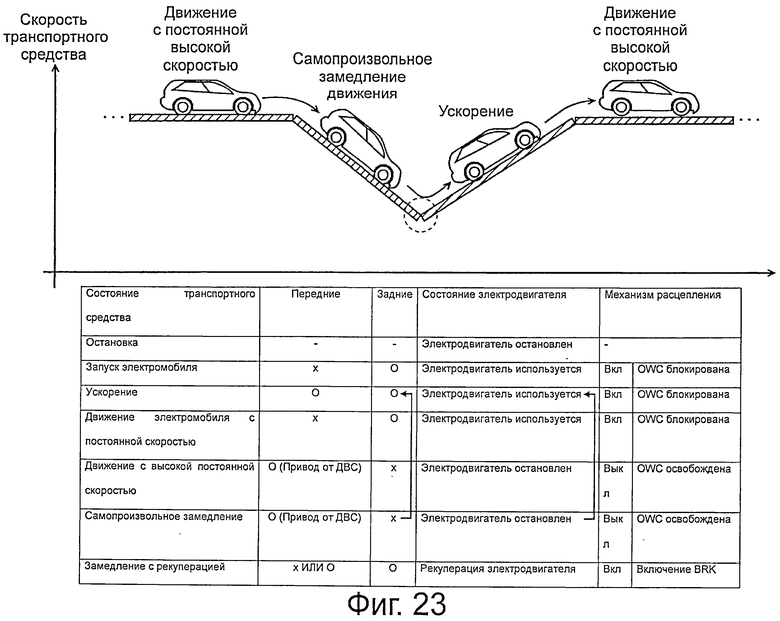
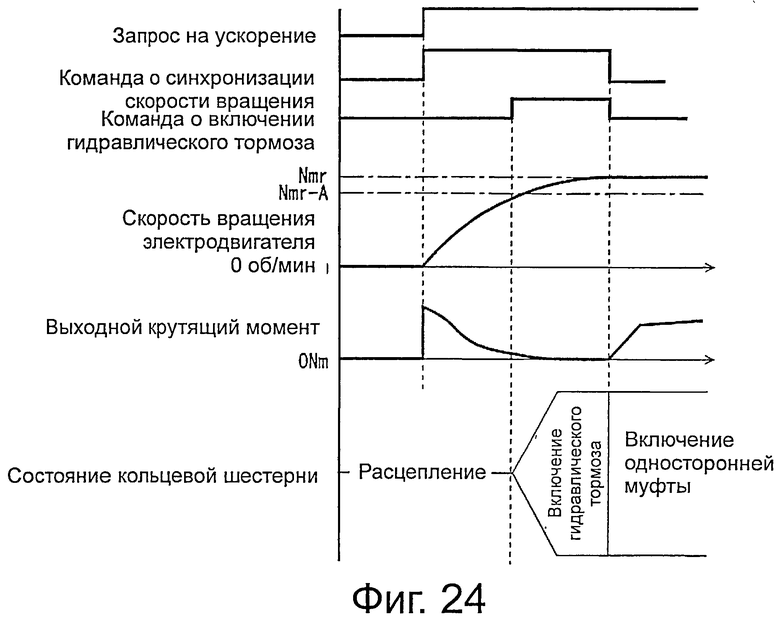
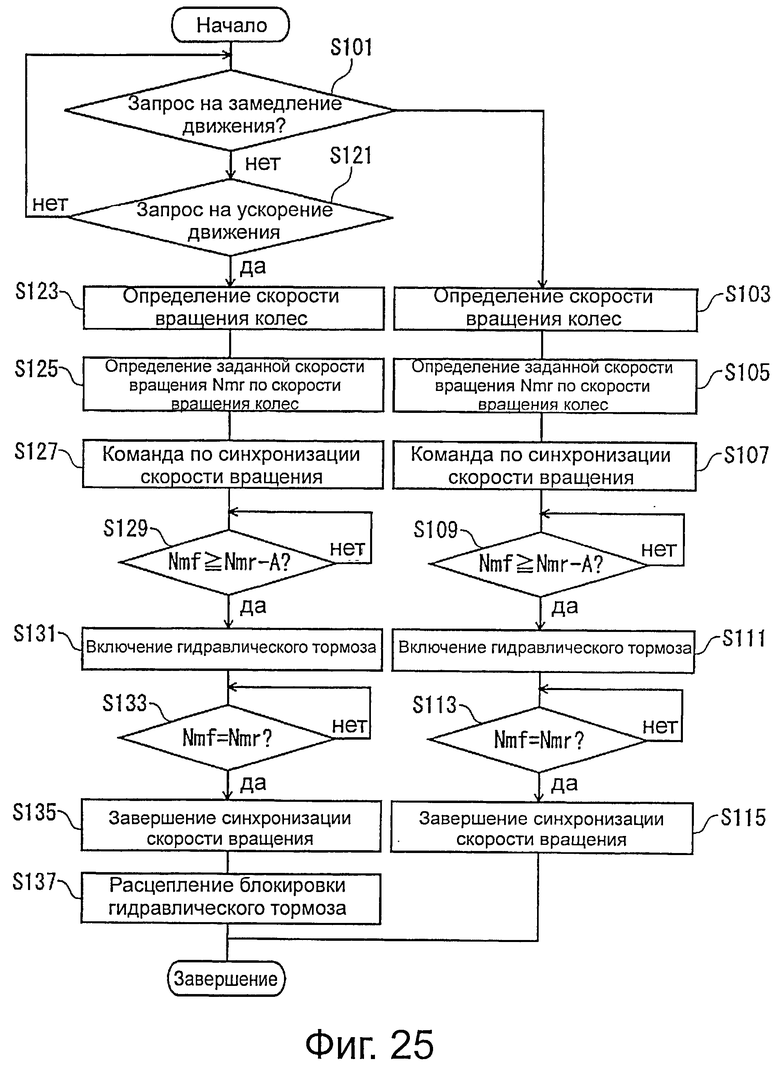
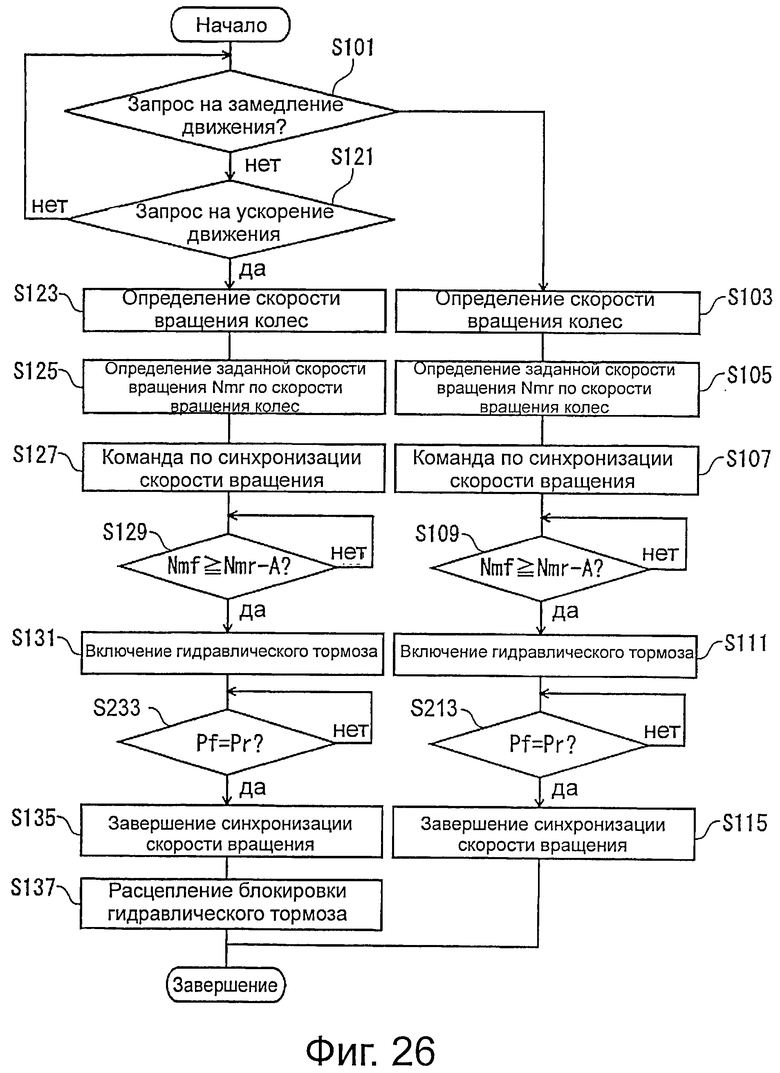
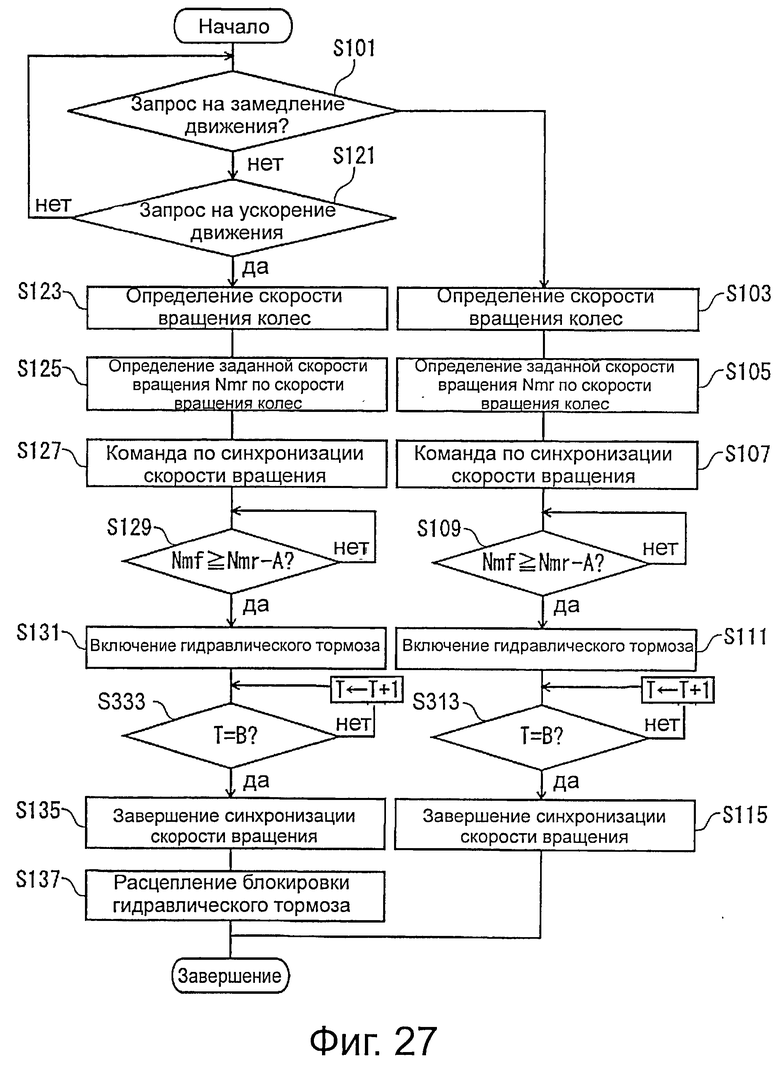
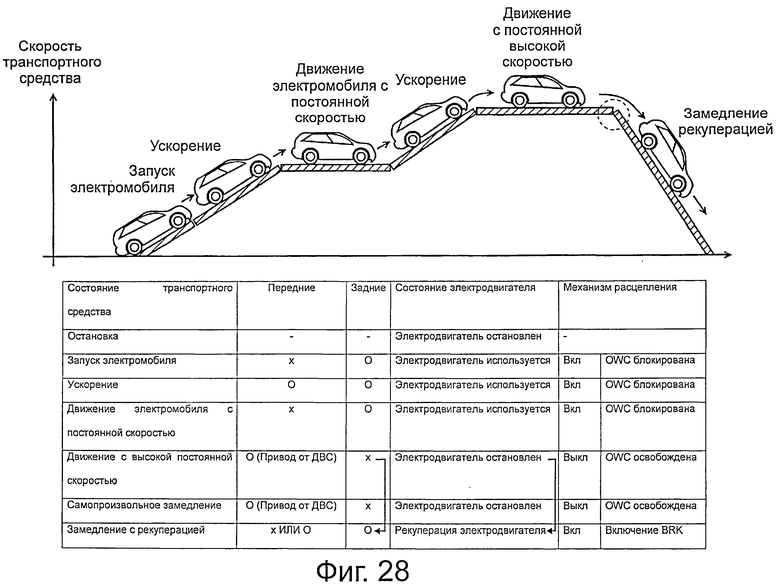


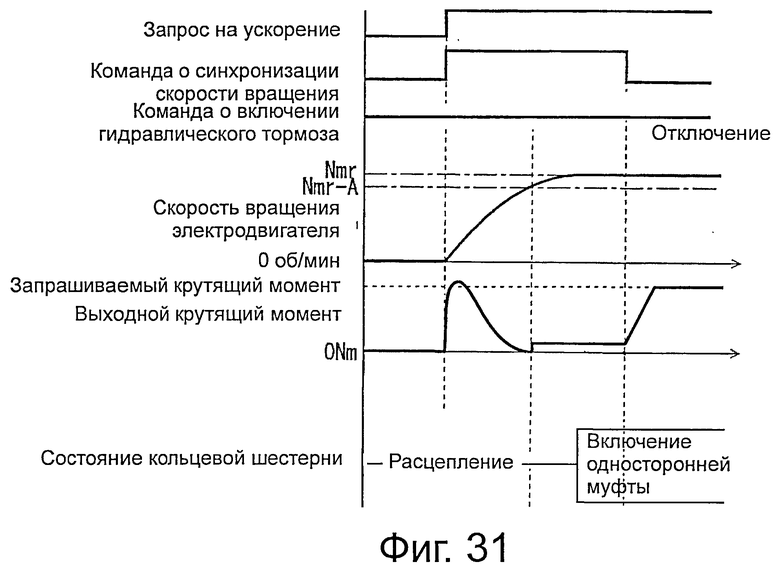
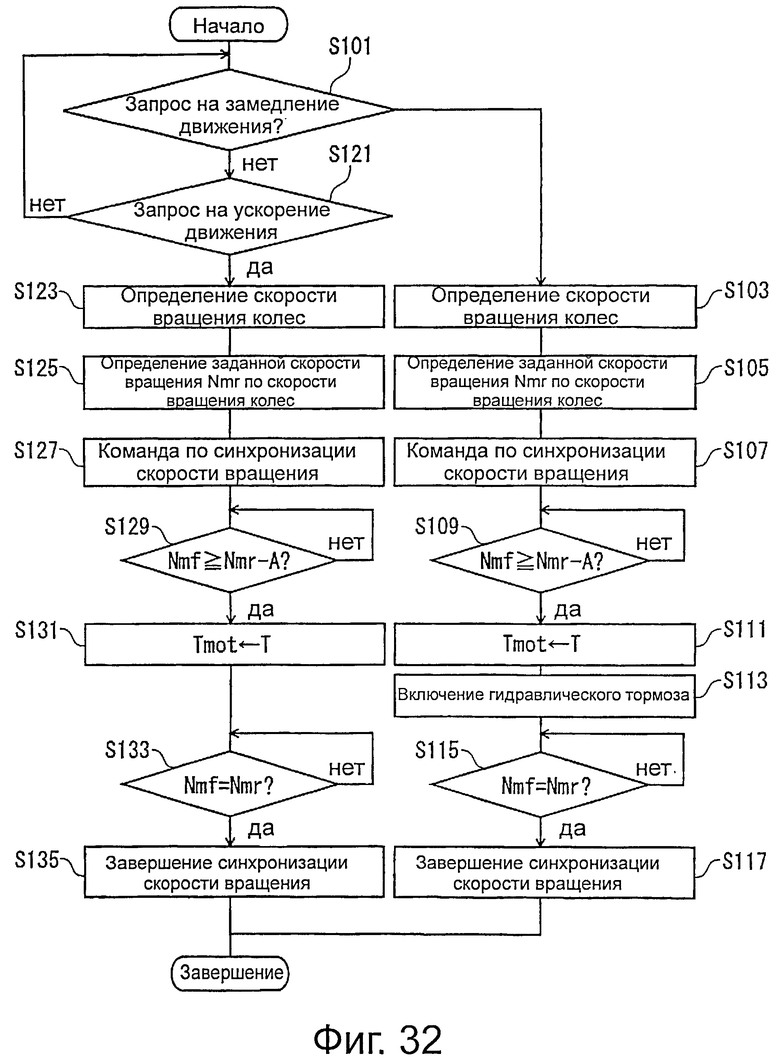
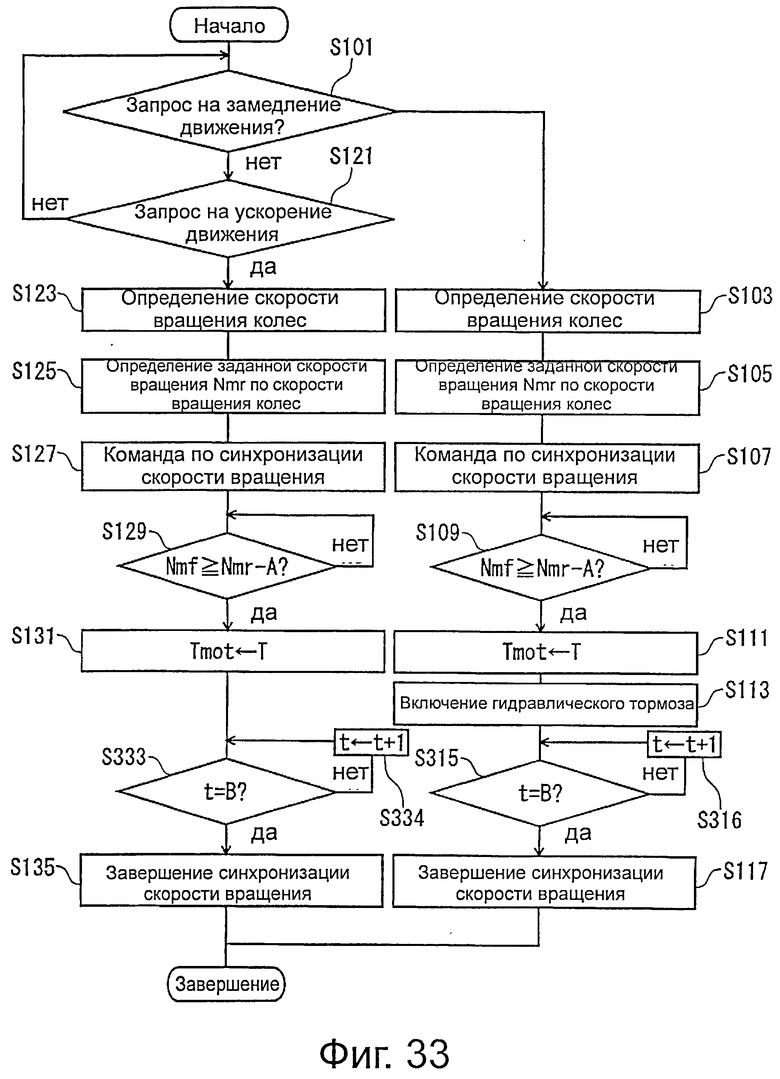
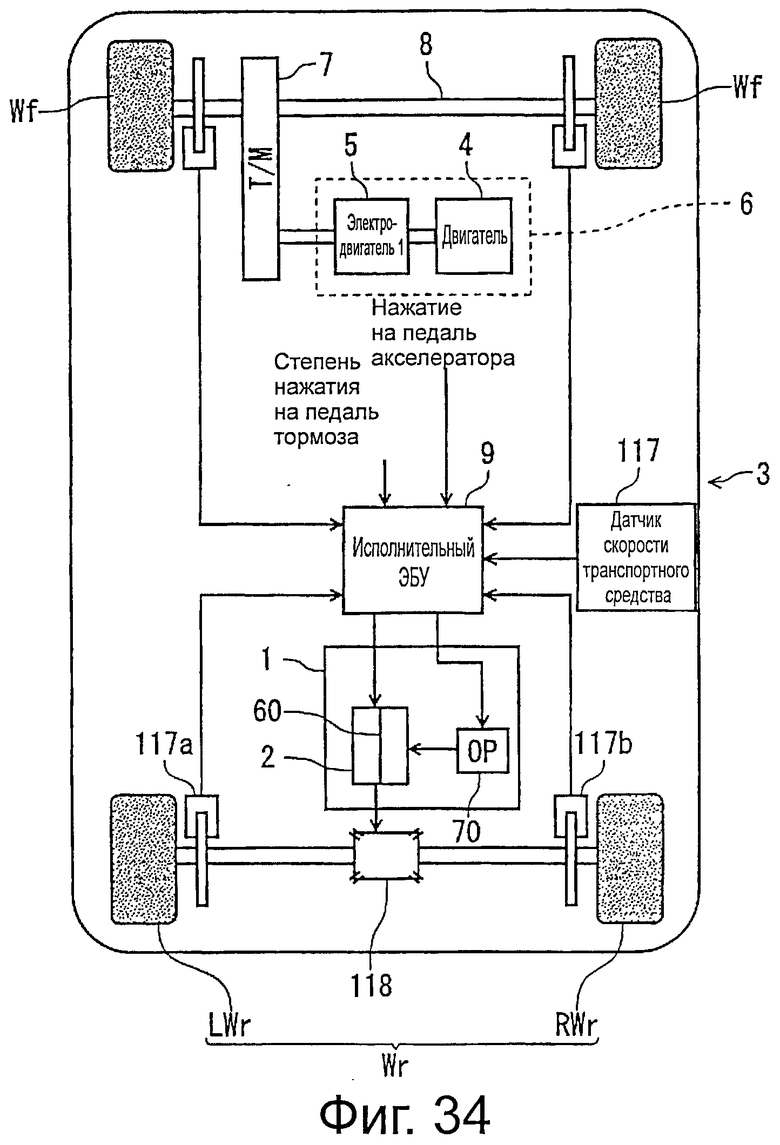


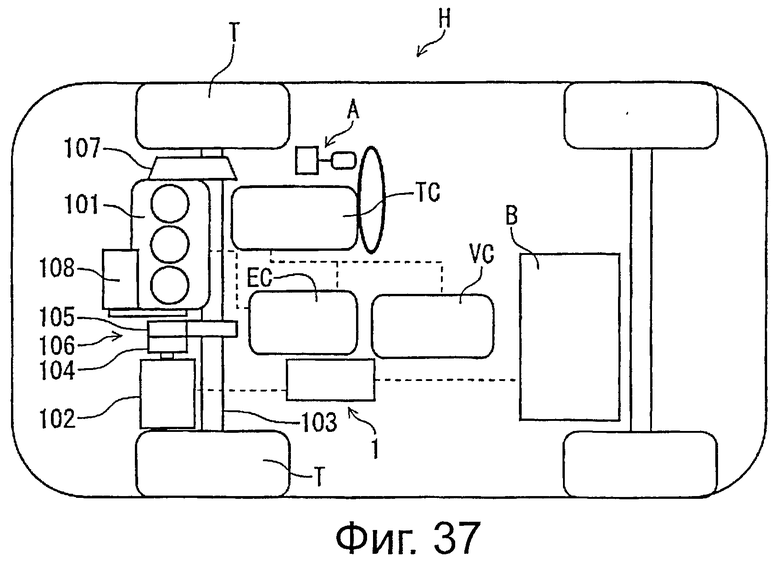

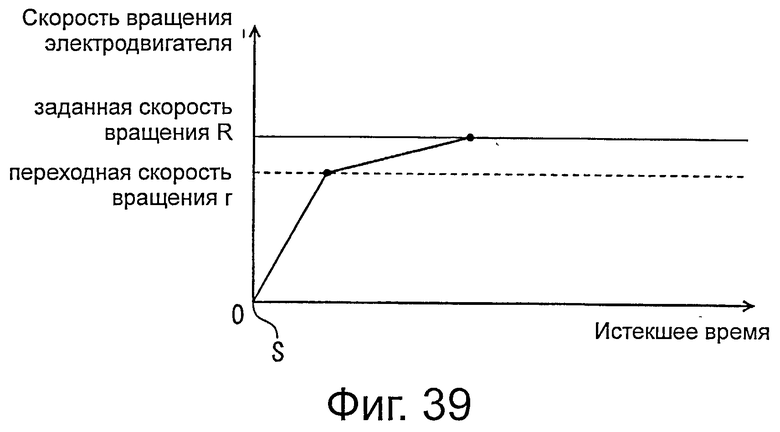
Группа изобретений относится к вариантам устройства управления приводом для транспортного средства. Устройство управления по первому и второму вариантам содержит приводное устройство, электродвигатель, устройство односторонней силовой передачи, устройство двусторонней силовой передачи, датчик для определения скорости транспортного средства или скорости вращения второй оси, секцию определения заданной скорости вращения электродвигателя, датчик для определения скорости вращения электродвигателя, блок управления. Приводное устройство передает движущую силу на первую ось. Электродвигатель передает движущую силу на вторую ось. Блок управления выполнен с возможностью управления скоростью электродвигателя и с возможностью управления включением устройства двусторонней силовой передачи. В устройстве по первому варианту блок управления приводит в действие устройство двусторонней силовой передачи, когда электродвигатель начинает работать в режиме силового привода, а скорость вращения электродвигателя достигает пороговой скорости вращения ниже заданной скорости вращения. В устройстве по второму варианту блок управления управляет электродвигателем таким образом, чтобы электродвигатель создавал заданный крутящий момент, когда электродвигатель работает в режиме рекуперации, а скорость вращения электродвигателя достигает пороговой скорости вращения ниже заданной скорости вращения. Технический результат заключается в уменьшении удара, возникающего в силовом передающем устройстве. 2 н. и 11 з.п. ф-лы, 39 ил.
1. Устройство управления приводом для транспортного средства, содержащего приводное устройство, выполненное с возможностью передачи движущей силы на первую ось, являющуюся осью передних или задних колес, электродвигатель, выполненный с возможностью передачи движущей силы на вторую ось, являющуюся другой осью из указанных осей, передних или задних колес, устройство односторонней силовой передачи, расположенное на линии силовой передачи между второй осью и электродвигателем, выполненное с возможностью передачи силы в режиме привода от электродвигателя на вторую ось, устройство двусторонней силовой передачи, расположенное на линии силовой передачи параллельно устройству односторонней силовой передачи, выполненное с возможностью передачи момента вращения от второй оси на электродвигатель, характеризующееся тем, что содержит первый датчик для определения скорости транспортного средства или скорости вращения второй оси, секцию определения заданной скорости вращения, выполненную с возможностью определения заданной скорости вращения электродвигателя на основании скорости транспортного средства или скорости вращения второй оси, определяемой первым датчиком, второй датчик для определения скорости вращения электродвигателя, и блок управления, выполненный с возможностью управления электродвигателем таким образом, чтобы скорость вращения электродвигателя была синхронизирована с заданной скоростью вращения, и с возможностью управлять включением устройства двусторонней силовой передачи, когда электродвигатель начинает работать в режиме силового привода или в режиме рекуперации, при движении транспортного средства под действием движущей силы от указанного приводного устройства, при этом блок управления выполнен с возможностью приводить в действие устройство двусторонней силовой передачи, когда электродвигатель начинает работать в режиме силового привода, а скорость вращения электродвигателя достигает пороговой скорости вращения, ниже заданной скорости вращения, и блок управления выполнен также с возможностью отключать устройство двусторонней силовой передачи, когда скорость вращения электродвигателя синхронизирована с заданной скоростью вращения.
2. Устройство управления приводом по п. 1 , в котором устройство двусторонней силовой передачи выполнено с возможностью передавать мощность между второй осью и электродвигателем с использованием гидравлического давления, а блок управления выполнен с возможностью определять, что скорость вращения электродвигателя синхронизирована с заданной скоростью вращения, если гидравлическое давление в устройстве двусторонней силовой передачи достигло порогового значения.
3. Устройство управления приводом по п. 1, в котором блок управления выполнен с возможностью определять, что скорость вращения электродвигателя синхронизирована с заданной скоростью вращения, если после включения устройства двусторонней силовой передачи прошло заданное время.
4. Устройство управления приводом по любому из пп. 1-3, дополнительно содержащее редуктор, расположенный на линии силовой передачи между второй осью и электродвигателем.
5. Устройство управления приводом по п. 4, в котором электродвигатель, редуктор, устройство двусторонней силовой передачи и вторая ось обеспечены для каждого колеса, левого и правого колеса, расположенных на второй оси, а блок управления выполнен с возможностью индивидуально управлять выходным крутящим моментом электродвигателя для каждого колеса, левого и правого колеса, или работой устройства двусторонней силовой передачи, соответствующего каждому колесу, левому и правому колесу, когда электродвигатель начинает работать в режиме силового привода или в режиме рекуперации при повороте транспортного средства за счет усилия, создаваемого указанным приводным устройством.
6. Устройство управления приводом для транспортного средства, содержащего приводное устройство, выполненное с возможностью передачи движущей силы на первую ось, являющуюся осью передних или задних колес, электродвигатель, выполненный с возможностью передачи движущей силы на вторую ось, являющуюся другой осью из указанных осей, передних или задних колес, устройство односторонней силовой передачи, расположенное на линии силовой передачи между второй осью и электродвигателем, для передачи усилия силового привода от электродвигателя на вторую ось, устройство двусторонней силовой передачи, расположенное на линии силовой передачи параллельно устройству односторонней силовой передачи, для передачи крутящего момента со второй оси на электродвигатель, характеризующееся тем, что содержит первый датчик для определения скорости транспортного средства или скорости вращения второй оси, секцию определения заданной скорости вращения, выполненную с возможностью определения заданной скорости вращения электродвигателя на основании скорости транспортного средства или скорости вращения второй оси, определяемой первым датчиком, второй датчик для определения скорости вращения электродвигателя, и блок управления, выполненный с возможностью управления электродвигателем таким образом, чтобы скорость вращения электродвигателя была синхронизирована с заданной скоростью вращения, и с возможностью управлять выходным крутящим моментом электродвигателя и включением устройства двусторонней силовой передачи, когда электродвигатель начинает работать в режиме силового привода или в режиме рекуперации, при движении транспортного средства под действием движущей силы от указанного приводного устройства, при этом блок управления выполнен с возможностью управлять электродвигателем таким образом, чтобы электродвигатель создавал заданный крутящий момент, когда электродвигатель работает в режиме рекуперации, а скорость вращения электродвигателя достигает пороговой скорости вращения, ниже заданной скорости вращения, и блок управления также выполнен с возможностью использовать устройство двусторонней силовой передачи, когда скорость вращения электродвигателя синхронизирована с заданной скоростью вращения.
7. Устройство управления приводом по п. 6, в котором блок управления выполнен с возможностью управлять электродвигателем таким образом, чтобы крутящий момент, создаваемый электродвигателем, был равен 0, когда скорость вращения электродвигателя синхронизована с заданной скоростью вращения.
8. Устройство управления приводом по п. 6, в котором блок управления выполнен с возможностью определять, что скорость вращения электродвигателя синхронизирована с заданной скоростью вращения, если прошло заданное время после начала управления электродвигателем при помощи блока управления таким образом, чтобы электродвигатель создавал заданный крутящий момент.
9. Устройство управления приводом по любому из пп. 6-8, в котором заданный крутящий момент является постоянным крутящим моментом, необходимым для обеспечения скорости вращения электродвигателя, синхронизируемой с заданной скоростью вращения.
10. Устройство управления приводом любому из пп. 6-8, дополнительно содержащее редуктор, расположенный на линии силовой передачи между второй осью и электродвигателем.
11. Устройство управления приводом по п. 9, дополнительно содержащее редуктор, расположенный на линии силовой передачи между второй осью и электродвигателем.
12. Устройство управления приводом по п. 10, в котором электродвигатель, редуктор, устройство двусторонней силовой передачи и вторая ось обеспечены для каждого колеса, левого и правого колеса, расположенных на второй оси, а блок управления выполнен с возможностью индивидуально управлять выходным крутящим моментом электродвигателя для каждого колеса, левого и правого колеса, или работой устройства двусторонней силовой передачи, соответствующего каждому колесу, левому и правому колесу, когда электродвигатель начинает работать в режиме силового привода или в режиме рекуперации при повороте транспортного средства за счет усилия, создаваемого указанным приводным устройством.
13. Устройство управления приводом по п. 11, в котором электродвигатель, редуктор, устройство двусторонней силовой передачи и вторая ось обеспечены для каждого колеса, левого и правого колеса, расположенных на второй оси, а блок управления выполнен с возможностью индивидуально управлять выходным крутящим моментом электродвигателя для каждого колеса, левого и правого колеса, или работой устройства двусторонней силовой передачи, соответствующего каждому колесу, левому и правому колесу, когда электродвигатель начинает работать в режиме силового привода или в режиме рекуперации при повороте транспортного средства за счет усилия, создаваемого указанным приводным устройством.
| US 6321865 B1, 27.11.2001 | |||
| JP H1199838 A, 13.04.1999 | |||
| EP 1955885 A2, 13.08.2008 | |||
| JP 2008267353 A, 06.11.2008 | |||
| JP 2005098456 A, 14.04.2005 | |||
| JP H10288059 A, 27.10.1998 | |||
| JP 2003032806 A, 31.01.2003 | |||
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |

