Область техники, к которой относится изобретение
Настоящее изобретение относится к общей области турбовинтовых двигателей, содержащих, по меньшей мере, одну систему лопаток вентилятора с регулируемой ориентацией. Точнее оно относится к области управления ориентацией лопаток вентилятора двухвинтового турбовинтового двигателя самолета.
Известно, что двухвинтовой авиационный турбовинтовой двигатель содержит турбину с двумя роторами противоположного вращения, каждый из которых приводит во вращение систему лопаток вентилятора без обтекателя. Можно, например, обратиться к документу GB 2.129.502, который описывает различные варианты выполнения такого турбовинтового двигателя.
В этом типе турбовинтового двигателя ориентация лопаток вентилятора каждой системы (говорят также о регулировке шага) является одним из параметров, позволяющих управлять тягой турбовинтового двигателя. Для этого одно из известных решений для управления ориентацией лопаток вентилятора одной и той же системы состоит в использовании промежуточной передачи управления угла установки, которая выполнена с использованием радиальных валов, приводимых силовыми цилиндрами, расположенными в центре турбовинтового двигателя.
Несмотря на эффективность недостатком такого решения является, в частности, сложность изготовления, так как оно требует использования большого количества зубчатых передач. Кроме того, этот тип управления требует наличия радиальных валов большого диаметра для исключения торсионных проблем, которым они подвержены. Таким образом, такие валы приводят к значительному мидель-шпангоуту, что в свою очередь приводит к дополнительной закупорке аэродинамического потока и вызывает, таким образом, потерю мощности.
Сущность изобретения
Целью настоящего изобретения является устранение указанных недостатков путем предложения управления ориентацией винтовых лопастей, не требующего использования торсионных валов.
Эта цель достигается устройством управления ориентацией лопаток вентилятора турбовинтового двигателя, содержащего, по меньшей мере, одну систему лопаток вентилятора с регулируемой ориентацией, при этом упомянутая система жестко соединена при вращении с вращающимся кольцом, с центром на продольной оси и механически связанным с ротором турбины, при этом каждая лопатка системы для регулировки ее ориентации соединена синхронизирующим кольцом с центром на продольной оси, отличающимся тем, что оно, кроме того, содержит силовой цилиндр с центром на продольной оси, жестко соединенным при вращении с ротором турбины и механически связанным с синхронизирующим концом с помощью нескольких соединительных рычагов, связанных со штоком силового цилиндра и шарнирно установленных на синхронизирующем кольце таким образом, что осуществление движения силового цилиндра приводит к вращательному перемещению синхронизирующего кольца вокруг продольной оси.
Устройство управления по изобретению имеет то преимущество, что соединительные рычаги работают на растяжение, а не кручение так, что образующие их тяги могут быть уменьшенного диаметра. Кроме того, это устройство управления лишено зубчатых передач. Отсюда следует легкое, точное управление и с уменьшенной массой.
В соответствии с предпочтительной конструкцией, каждый соединительный рычаг содержит осевую тягу, связанную со штоком силового цилиндра, радиальную тягу, связанную с синхронизирующим кольцом, и, по меньшей мере, один рычаг угловой передачи, связывающий осевую тягу с радиальной тягой таким образом, что действие силового привода приводит к перемещению радиальной тяги, по существу, в радиальном направлении.
Предпочтительно каждый соединительный рычаг содержит, кроме того, другой рычаг угловой передачи, жестко соединенный с вращающимся кольцом и связанный с одной стороны с радиальной тягой и с другой стороны с тангенциальной тягой, закрепленной на синхронизирующим кольце таким образом, что перемещение радиальной тяги, по существу, в радиальном направлении приводит к вращательному перемещению синхронизирующего кольца вокруг продольной оси.
В соответствии с вариантом осуществления конец осевой тяги каждого соединительного рычага соединен с внешним сепаратором подшипника качения, внутренний сепаратор которого соединен со штоком силового цилиндра и установлен с возможностью продольного скольжения в пазах вала ротора турбины. В этом случае радиальная тяга каждого соединительного рычага предпочтительно направляется радиально с помощью герметичных подшипников.
В соответствии с другим вариантом осуществления конец аксиальной тяги каждого соединительного рычага связан со штоком силового цилиндра.
Предпочтительно устройство управления содержит, кроме того, средства для обеспечения заранее заданной ориентации лопаток вентилятора в случае неисправности силового цилиндра.
Предпочтительно также каждый рычаг устройства управления радиально проходит через рычаг корпуса турбовинтового двигателя.
Соединительные рычаги могут быть равномерно распределены вокруг продольной оси. Наконец, система может содержать десять лопаток вентилятора, а силовой цилиндр может быть механически связан с помощью пяти соединительных рычагов с синхронизирующим кольцом.
Изобретение касается также двухвинтового турбовинтового двигателя, содержащего турбину с двумя роторами противоположного вращения и две системы лопаток вентилятора с регулируемой ориентацией, жестко соединенных при вращении с двумя вращающимися кольцами, соответственно связанными с роторами, при этом управление ориентацией лопаток вентилятора, по меньшей мере, одной из систем осуществляется устройством управления, описанным выше.
Краткое описание чертежей
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
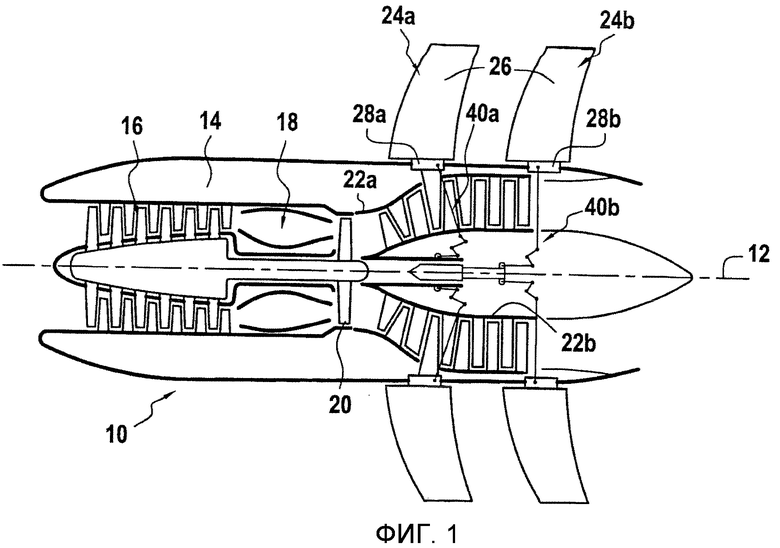
- фиг.1 схематично изображает вид в продольном разрезе двухвинтового турбовинтового двигателя, снабженного устройством управления ориентацией винтов по изобретению;
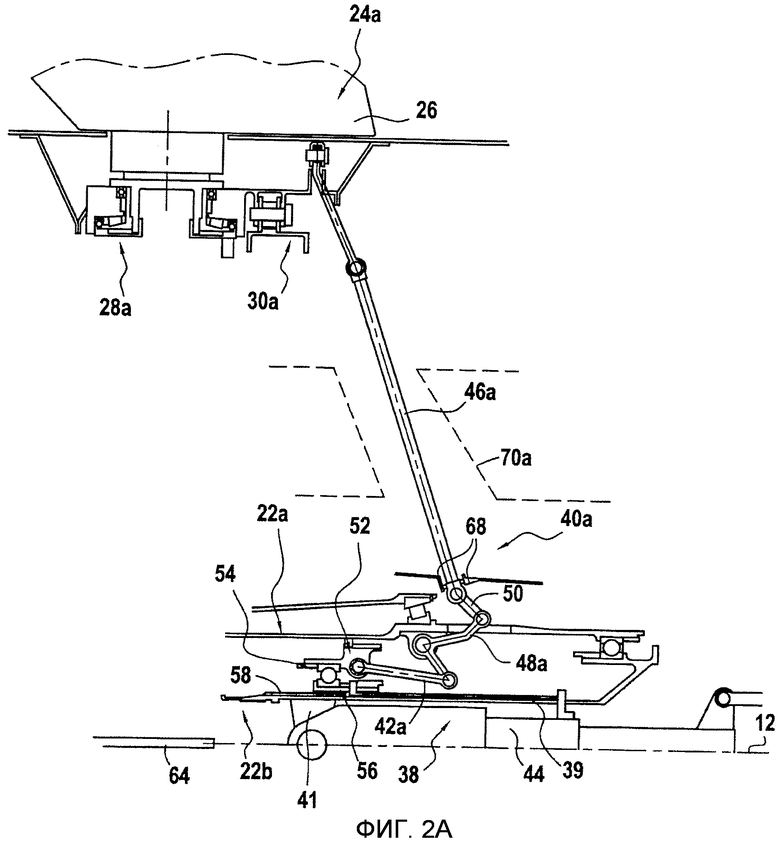
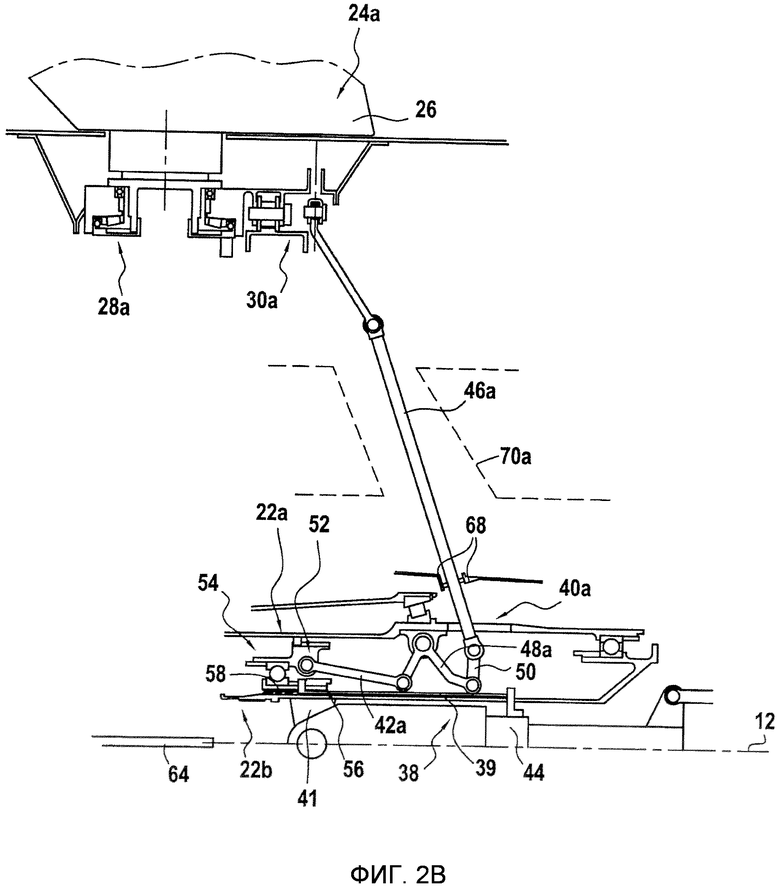
- фиг.2А и 2В изображают виды в увеличенном масштабе фиг.1, представляющие устройство управления ориентацией винтов входной системы;
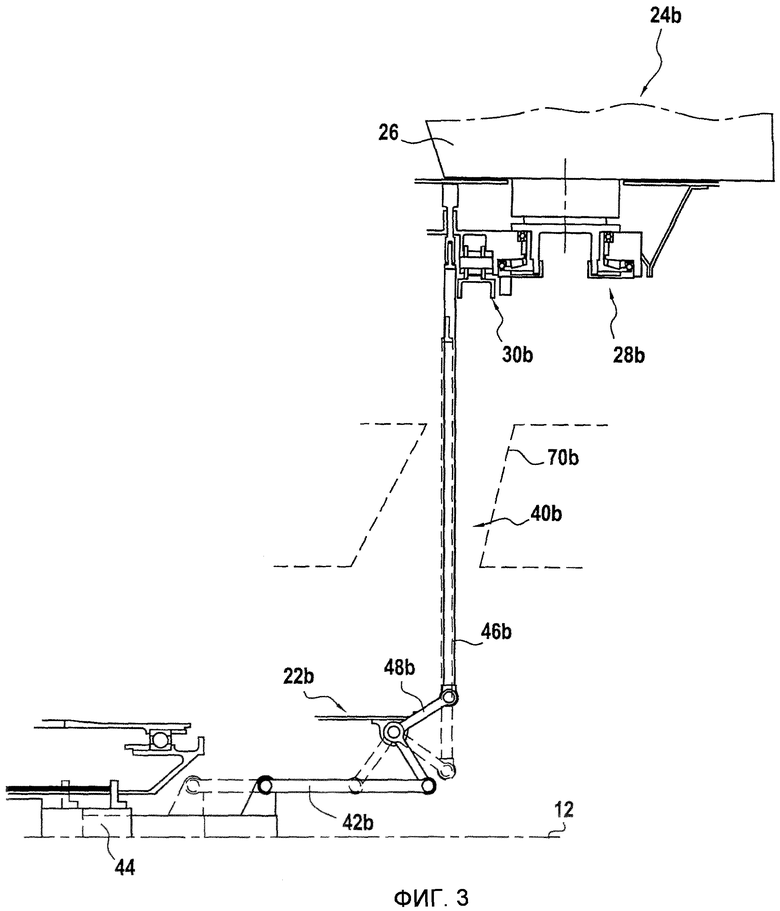
- фиг.3 изображает вид в увеличенном масштабе фиг.1, представляющий устройство ориентации винтов выходной системы; и
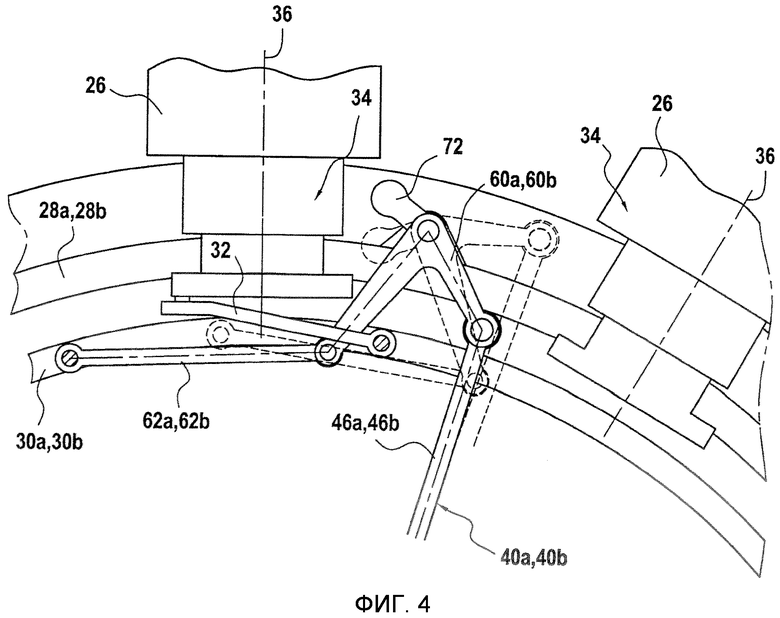
- фиг.4 изображает вид спереди части устройства управления по фиг.2А, 2В и 3.
Подробное описание варианта воплощения
Фиг.1 изображает весьма схематично пример воплощения авиационного турбовинтового двигателя двухвинтового типа.
Такой турбовинтовой двигатель известен и поэтому не будет детально описан. Турбовинтовой двигатель, в частности, содержит продольную ось 12 и кольцевую гондолу 14, расположенные коаксиально вокруг продольной оси. Турбовинтовой двигатель 10 содержит, кроме того, от входа к выходу компрессор 16, камеру сгорания 18 и турбину 20 с двумя роторами 22а, 22b противоположного вращения, причем эти различные элементы также расположены коаксиально вокруг продольной оси 12 турбовинтового двигателя.
Турбовинтовой двигатель 10 содержит также входную систему (или переднюю) 24а и выходную систему (или заднюю) 24b лопаток вентилятора 26 с регулируемой ориентацией. Винтовые лопасти 26 каждой системы 24а, 24b установлены более конкретно на вращающемся кольце 28а, 28b в форме кольцевой платформы с центром на продольной оси 12 турбовинтового двигателя.
Лопатки вентилятора 26 каждой системы, кроме того, равномерно размещены по окружности и проходят радиально от поверхности соответствующего вращающегося кольца 28а, 28b. Каждый ротор 22а, 22b несет и приводит во вращение одно из вращающихся колец 28а, 28b, на котором установлена одна из систем 24а, 24b лопаток вентилятора с регулируемой ориентацией.
Турбовинтовой двигатель содержит также устройство управления ориентацией лопаток вентилятора каждой системы 24а, 24b. Устройство управления по изобретению позволяет регулировать ориентацию лопаток вентилятора одновременно входной системы 24а и выходной системы 24b. Оно могло бы быть, во всяком случае, использовано для управления ориентацией лопаток только одной из этих систем.
Как подробнее представлено на фиг.2А, 2В и 3, устройство управления по изобретению для каждой системы 24а, 24b содержит синхронизирующее кольцо 30а, 30b, которое размещено по центру продольной оси 12 турбовинтового двигателя и которое расположено коаксиально внутри соответствующего вращающегося кольца 28а, 28b, при этом оно, в общем, имеет многоугольную форму.
Кроме того, как изображено на фиг.4, каждое синхронизирующее кольцо 30а, 30b связано с помощью нескольких приводных тяг 32, шарнирно соединенных с обоих своих концов с суппортами 34 ножки лопатки, которые установлены с возможностью поворота на соответствующем вращающемся кольце 28а, 28b. Известным образом, каждый суппорт 34 удерживает ножку лопатки 26, например, с помощью крепления в форме ласточкина хвоста и закреплен с возможностью поворота на радиальной оси 36 на вращающемся кольце, например, с помощью шарикового подшипника.
Вследствие этого вращение каждого синхронизирующего кольца 30а, 30b вокруг продольной оси 12 турбовинтового двигателя (в том или ином направлении) приводит к повороту каждого суппорта 34 ножки лопатки на ее соответствующей радиальной оси 36 (с помощью приводных рычагов 32), следствием чего является изменение ориентации лопаток 26, установленных на этих суппортах.
Устройство управления по изобретению содержит также силовой цилиндр 38 (гидравлического, пневматического или электрического типа), который отцентрован по продольной оси 12 и жестко соединен при вращении с валом одного из роторов 22а, 22b турбины 20 (в приведенном в данном случае примере силовой цилиндр жестко соединен при вращении с валом ротора 22b, приводящим во вращение выходную систему 24b).
Для этого силовой цилиндр 38 размещен внутри кольцевой трубы 39 с помощью крепления 41, причем эта труба отцентрирована по продольной оси 12 и аксиально и тангенциально закреплена на валу ротора 22b.
Силовой цилиндр 38, кроме того, механически связан с синхронизирующими кольцами 30а, 30b с помощью нескольких соединительных рычагов 40а, 40b для привода во вращение этих синхронизирующих колец вокруг продольной оси 12.
В соответствии с фиг.2A, 2B и 4 ниже будет описан соединительный рычаг 40а, связывающий силовой цилиндр 38 с синхронизирующим кольцом 32 входной системы 24а.
Каждый соединительный рычаг 40а содержит аксиальную тягу 42а, которая соединена со штоком 44 силового цилиндра 38, радиальную тягу 46а, которая соединена с синхронизирующим кольцом 30а, и содержит также рычаг 48а угловой передачи, который связывает осевую тягу с радиальной тягой. Каждый соединительный рычаг содержит также управляющий рычаг 50, который введен между рычагом 48а угловой передачи и радиальной тягой 46а.
Точнее говоря, осевая тяга 42а каждого соединительного рычага 40а связана с внешним сепаратором 52 подшипника качения 54. Внутренний сепаратор 56 последнего установлен на валу ротора 22b с помощью пазов 58 и связан со штоком 44 силового цилиндра 38. Этот подшипник качения 54 удерживает при вращении вал ротора 22b относительно вала ротора 22а, приводящего во вращение входную систему 24а. Кроме того, рычаг 48а угловой передачи каждого соединительного рычага 40а закреплен с возможностью поворота на валу ротора 22а.
Благодаря такому расположению легко понять, что движение силового цилиндра 38 будет вызывать продольное перемещение подшипника качения 54 путем скольжения его внутреннего сепаратора 56 в пазах 58. Осевая тяга 42а каждого соединительного рычага, будучи связанной с внешним сепаратором этого подшипника качения, будет также перемещаться вдоль продольной оси 12, осуществляя, таким образом, поворот рычага 48а угловой передачи вокруг его точки крепления на валу ротора 22. С помощью передаточной тяги 50 поворот рычага 48а угловой передачи вокруг его точки крепления будет, таким образом, вызывать перемещение радиальной тяги 46а, по существу, в радиальном направлении. Эта кинематика, впрочем, изображена на фиг.2A и фиг.2B, которые представляют два крайних положения соединительных рычагов 40а.
Устройство управления по изобретению содержит также средства для преобразования этого перемещения радиальной тяги 46а соединительных рычагов 40а во вращение синхронизирующего кольца 30а вокруг продольной оси 12.
Для этого, как изображено на фиг.4, каждый соединительный рычаг 40а содержит, кроме того, другой рычаг 60а угловой передачи, который закреплен шарнирно на вращающемся кольце 28а и который связан с одной стороны с радиальной тягой 46а и с другой стороны с тангенциальной тягой 62а, причем последняя закреплена на синхронизирующем кольце 30а. Вследствие этого перемещение радиальной тяги, по существу, в радиальном направлении приведет к повороту рычага 60а угловой передачи вокруг его точки крепления к вращающемуся кольцу, следствием чего будет являться перемещение тангенциальной тяги, по существу, в тангенциальном направлении. Это перемещение приводит к вращению (в том или ином направлении) синхронизирующего кольца 30а вокруг продольной оси.
Далее, со ссылкой на фиг.3 и 4 будут описаны соединительные рычаги 40b, связывающие силовой цилиндр 38 с синхронизирующим кольцом 30b выходной системы 24b.
Так же, как при управлении ориентацией лопаток входной системы, каждый соединительный рычаг 40b, в данном случае, содержит аксиальную тягу 42b, которая связана со штоком 44 силового цилиндра 38, радиальную тягу 46b, которая связана синхронизирующим кольцом 30b, и рычаг 48b угловой передачи, который соединяет аксиальную тягу с радиальной тягой, причем этот рычаг угловой передачи шарнирно закреплен на валу ротора 22b.
Понятно, что движение силового цилиндра будет, таким образом, вызывать продольное перемещение аксиальной тяги 42b, которая заставляет поворачиваться рычаг 48b угловой передачи вокруг его точки крепления на валу ротора 22b. Поворот рычага 48b управления углом будет затем вызывать перемещение радиальной тяги 46b по существу в радиальном направлении. Эта кинематика, впрочем, изображена на фиг.3, где сплошной и штриховой линиями изображены два крайних положения различных элементов соединительного рычага 40b.
Наконец, преобразование перемещения радиальной тяги 46b соединительных рычагов 40b во вращение синхронизирующего кольца 30b вокруг продольной оси 12 осуществлено подобно описанному со ссылкой на фиг.4. Как изображено на этом чертеже, каждый соединительный рычаг 40b содержит для этого другой рычаг 60b угловой передачи, который шарнирно закреплен на вращающемся кольце 28b и который связан с одной стороны с радиальной тягой 46b и с другой стороны с тангенциальной тягой 62b, причем последняя закреплена на синхронизирующем кольце 30b. Кинематика, таким образом, идентична ранее описанной для работы входной системы.
Далее будут описаны характеристики, общие для управления ориентацией лопастей входной системы и выходной системы.
Как изображено на фиг.2А и 2В, силовой цилиндр 38, позволяющий приводить соединительные рычаги 40а, 40b, размещен в оболочке, в которую через жиклер 64 подается масло. Это масло служит для смазки и охлаждения различных подшипниковых узлов, в частности подшипника 54, поддерживающего вращение роторных валов 22а, 22b.
Так как соединительные рычаги 40а пересекают оболочку с маслом, радиальная тяга 46а этих рычагов радиально направлена к своему нижнему концу с помощью герметичных подшипников 68. Наличие герметичных подшипников не является обязательным для направления радиальных тяг 46b соединительных рычагов 40b привода выходного синхронизирующего кольца 30b (действительно, эти соединительные рычаги 40b не пересекают масляную оболочку).
Кроме того, радиальные рычаги 46а, 46b радиально пересекают каждый из рычагов кожуха 70а, 70b турбовинтового двигателя.
Наконец, с особо предпочтительной характеристикой изобретения, общей с управлением ориентацией лопаток входной системы и выходной системы, устройство управления содержит, кроме того, средства для обеспечения заданной ориентации лопаток в случае неисправности силового цилиндра.
Как изображено на фиг.4, эти средства образованы инерционными грузами 72, образующими противовесы. Эти инерционные грузы 72 жестко соединены и рычагами 60а, 60b угловой передачи и имеют массу, рассчитанную таким образом, чтобы обеспечить усилие растяжения на радиальных тягах 46а, 46b.
Так, в случае неисправности силового цилиндра 38 центробежная сила, обеспечиваемая массой радиальных рычагов 46а, 46b, и эти инерционные грузы стремятся повернуть рычаг 60а, 60b угловой передачи вокруг его точки крепления для «привода» синхронизирующего колеса 30а, 30b в заранее заданное положение. Например, это заранее заданное положение может соответствовать флюгированию лопаток 26 вентилятора.
Наконец, чертежи представляют пример конфигурации турбовинтового двигателя, в котором система лопастей, на которой размещено устройство управления по изобретению, содержит десять лопаток 26 вентилятора. При такой конфигурации пять соединительных рычагов 40а, 40b, равномерно распределенных вокруг продольной оси 12 турбовинтового двигателя, могут обеспечить поворот синхронизирующих колец 30а, 30b (последние, таким образом, имеют форму десятиугольника).
Кроме того, представленное изобретение было описано для турбовинтового двигателя с турбиной противоположного вращения, непосредственно связанной с винтами. Изобретение относится также к турбовинтовым двигателям с двойным винтом, винты которого приводятся в движение посредством редуктора с планетарными передачами.
Устройство управления ориентацией лопаток вентилятора турбовинтового двигателя, содержащего систему (24а) лопаток (26) вентилятора с регулируемой ориентацией, жестко соединенную при вращении с вращающимся кольцом (28а). Кольцо отцентровано по продольной оси (12) и механически связано с ротором турбины. Каждая лопатка системы соединена для регулировки ее ориентации с синхронизирующим кольцом (30а), отцентрованным по продольной оси. Устройство содержит, кроме того, силовой цилиндр (38), жестко соединенный при вращении с ротором турбины и механически связанный с синхронизирующим кольцом с помощью нескольких соединительных рычагов (40а). Каждый рычаг связан со штоком (44) силового цилиндра и шарнирно закреплен на синхронизирующем кольце таким образом, что движение силового цилиндра вызывает вращательное перемещение синхронизирующего кольца вокруг продольной оси. Турбовинтовой двигатель с двойным винтом содержит турбину (20) с двумя роторами противоположного вращения и две системы лопаток (26) вентилятора с регулируемой ориентацией. Достигается легкое, точное управление и уменьшение массы, поскольку рычаги работают на растяжение, и образующие их тяги могут быть уменьшенного диаметра, а устройство управления лишено зубчатых передач. 2 н. и 8 з.п. ф-лы, 5 ил.
1. Устройство управления ориентацией лопаток вентилятора турбовинтового двигателя, содержащего, по меньшей мере, одну систему (24а, 24b) лопаток (26) вентилятора с регулируемой ориентацией, при этом упомянутая система жестко соединена при вращении с вращающимся кольцом (28а, 28b), с центром на продольной оси (12) и механически связанным с ротором (22а, 22b) турбины (20), при этом каждая лопатка системы соединена для регулировки ее ориентации с синхронизирующим кольцом (30а, 30b) с центром на продольной оси, отличающееся тем, что оно содержит, кроме того, силовой цилиндр (38) с центром на продольной оси, жестко соединенным при вращении с ротором турбины и механически связанным с синхронизирующим кольцом с помощью нескольких соединительных рычагов (40а, 40b), каждый из которых содержит осевую тягу (42а, 42b), соединенную со штоком силового цилиндра, радиальную тягу (46а, 46b), связанную с синхронизирующим кольцом, и, по меньшей мере, один рычаг (48а, 48b) угловой передачи, соединяющий осевую тягу с радиальной тягой таким образом, что движение силового цилиндра приводит к вращательному перемещению синхронизирующего кольца вокруг продольной оси.
2. Устройство по п.1, в котором каждый соединительный рычаг (40а, 40b) содержит, кроме того, другой рычаг (60а, 60b) угловой передачи, жестко соединенный с вращающимся кольцом (28а, 28b) и связанный с одной стороны с радиальной тягой (46а, 46b) и с другой стороны с тангенциальной тягой (62а, 62b), закрепленной на синхронизирующем кольце (30а, 30b) так, что перемещение радиальной тяги, по существу, в радиальном направлении приводит к вращательному перемещению синхронизирующего кольца вокруг продольной оси.
3. Устройство по одному из пп.1 или 2, в котором конец осевой тяги (42а) каждого соединительного рычага (40а) соединен с внешним сепаратором (52) подшипника качения (54), внутренний сепаратор которого связан со штоком (44) силового цилиндра (38) и выполнен с возможностью продольного скольжения на валу ротора (22b) турбины по пазам (58).
4. Устройство по п.2, в котором радиальная тяга (46а) каждого соединительного рычага (40а) радиально направляется с помощью герметичных подшипников (68).
5. Устройство по одному из пп.1 или 2, в котором конец осевой тяги (42b) каждого из соединительных рычагов (40b) соединен со штоком (44) силового цилиндра (38).
6. Устройство по п.1, содержащее, кроме того, средства (72) для обеспечения заранее заданной ориентации лопаток (26) вентилятора в случае неисправности силового цилиндра (38).
7. Устройство по п.1, в котором каждый соединительный рычаг (40а, 40b) проходит радиально через рычаг (70а, 70b) кожуха турбовинтового двигателя.
8. Устройство по п.1, в котором соединительные рычаги (40а, 40b) равномерно распределены вокруг продольной оси (12).
9. Устройство по п.1, в котором система (24а, 24b) содержит десять лопаток (26) вентилятора, а силовой цилиндр (38) механически связан с синхронизирующим кольцом с помощью пяти соединительных рычагов (40а, 40b).
10. Турбовинтовой двигатель с двойным винтом, содержащий турбину (20) с двумя роторами противоположного вращения и две системы лопаток (26) вентилятора с регулируемой ориентацией, жестко соединенных при вращении с двумя вращающимися кольцами (28а, 28b), соответственно связанными с роторами, при этом управление ориентацией лопаток вентилятора, по меньшей мере, одной из систем осуществляется устройством по одному из пп.1-9.
| 1999 |
|
RU2155110C1 | |
| GB 2182727 A, (GENERAL ELECTRIC COMPANY), 20.05.1987 | |||
| US 3869221 A, (MOTOREN-UND TURBINEN-UNION MUNCHEN GMBH), 04.03.1975 | |||
| US 4657484 A, (GENERAL ELECTRIC COMPANY), 14.04.1987 | |||
| Пропеллер с автоматическими поворотными лопастями | 1929 |
|
SU24251A1 |
| Устройство винта с центробежным и автоматически изменяющимся шагом регулятора | 1931 |
|
SU40882A1 |

