Изобретение относится к электротехнике и может быть применено в приводах аэродинамических поверхностей летательных аппаратов, в частности, в качестве привода интерцепторов.
Известны приводы интерцептора от гидравлического цилиндра, шток которого действует в точке интерцептора, удаленной от его оси, создавая крутящий момент действием силы на плечо рычага (US №6981676 от 21.09.2004, EР №1516813 от 22.09.2003, US №2010/0320332 от 25.02.2008).
Известен привод интерцептора от гидроцилиндра (патент US №6189837 от 29.10.1998). При отказе гидропривода интерцептора в системе привода предусмотрены аварийные средства возврата интерцептора в исходное положение - пиропатрон с пиротехническим зарядом, при возгорании которого образуются газы, возвращающие поршень гидроцилиндра в исходное положение. Такой привод имеет большие габариты и массу.
Известен гидравлический привод интерцептора от гидроцилиндра (заявка WO №2009/136187 от 09.05.2008 г.), шток которого соединен с коленным шарниром коленного механизма, одно звено которого шарнирно закреплено на каркасе крыла, а другое шарнирно соединено с интерцептором на некотором расстоянии от его оси вращения для создания крутящего момента, действующего на интерцептор.
Недостаток существующих гидроприводов интерцептора - их сложность и возможная неравномерность подачи жидкости в различные гидроцилиндры, приводящая к неравномерности нагрузки на участки интерцептора и соответственно к его неравномерной деформации, приводящей к избыточным напряжениям и снижению надежности его работы. Кроме того, при аварийной ситуации с прекращением подачи рабочей жидкости в гидроцилиндр возможно стопорение интерцептора в рабочем положении.
Известны электромеханические приводы интерцептора через рычажный механизм (патент US №5918836 от 25.03.1997 г.), в том числе через кривошипно-шатунный (патент JP №07002148А от 18.06.1993 г.), в которых электродвигатель через многоступенчатый зубчатый редуктор приводит выходной вал, на котором шарнирно закреплен рычаг или кривошип.
Недостаток таких электроприводов - их увеличенные габариты и масса.
Известен силовой мини-привод (патент RU №2408125 от 27.01.2010 г.), корпус которого снабжен элементом крепления к подвижной аэродинамической поверхности таким образом, что продольная ось силового мини-привода ориентирована параллельно оси поворота подвижной аэродинамической поверхности летательного аппарата с расположенными внутри корпуса электродвигателем и многоступенчатой волновой передачи с телами качения, выходное звено которого снабжено втулкой, закрепленной на торцовой поверхности, и тягой с проушинами, одна из которых надета на втулку, а вторая крепится к неподвижной части летательного аппарата.
Известно устройство электромеханического привода аэродинамической поверхности самолета (патент RU №2442721 от 09.06.2010, прототип), имеющее два электромеханических привода, установленных в каркасе крыла, выходные ведущие звенья которых имеют соединения посредством многозвенного механизма с приводным звеном интерцептора; каждый электромеханический привод имеет закрепленный в каркасе крыла корпус, размещенный внутри корпуса электродвигатель с ротором, имеющим датчик его углового положения; присоединенный к ротору волновой редуктор с телами вращения, полый выходной вал которого соединен с ведущим звеном электромеханического привода посредством шлицевого стакана, расположенного внутри полого выходного вала и части ведущего звена электромеханического привода; устройство выталкивания шлицевого стакана из части ведущего звена электромеханического привода, имеющее пиропатрон, соединенный каналом, выходящим к дну шлицевого стакана.
Недостатки известных электромеханических приводов - невозможность их размещения в ограниченном по высоте внутреннем пространстве крыла.
Техническая задача изобретения - создание устройства электромеханического привода интерцептора, обеспечивающего возможность размещения электромеханического привода внутри крыла с толщиной, сопоставимой с диаметром электромеханического привода.
Техническая задача решена в конструкции устройства электромеханического привода интерцептора, крыла самолета, установленного на оси поворота, закрепленной в каркасе крыла, и имеющего приводное звено многозвенного механизма, закрепленное на внутренней поверхности интерцептора, содержащем: два электромеханических привода с ведущими валами, установленные в каркасе крыла; соединения многозвенного механизма с ведущими валами электромеханических приводов, при этом каждый электромеханический привод имеет закрепленный в каркасе крыла корпус; размещенный внутри корпуса электродвигатель с ротором, имеющим датчик его углового положения; присоединенный к ротору многоступенчатый волновой редуктор с телами вращения, полый выходной вал последней ступени которого соединен с ведущим валом электромеханического привода посредством шлицевой втулки, расположенной внутри полого выходного вала и части ведущего вала; средства выталкивания шлицевой втулки из полого выходного вала последней ступени редуктора, имеющие пиропатроны, соединенные каналом, выходящим к торцу шлицевой втулки, при этом многозвенный механизм имеет: приводной вал, установленный в стойках, закрепленных в каркасе крыла, концы которого соединены муфтами с ведущими валами; по меньшей мере, один закрепленный на приводном валу кривошип с тягой, соединенный первым шарниром с первым концом тяги, второй конец которой имеет второй шарнир для соединения с приводным звеном интерцептора.
Для соответствия момента, действующего на интерцептор со стороны приводного звена, моменту от аэродинамической силы, действующей на интерцептор, соединение приводного звена с внутренней поверхностью интерцептора является неподвижным, а угол между линией, соединяющей ось поворота интерцептора и ось второго шарнира, и внутренней поверхностью интерцептора находится в интервале 80…100°.
Для увеличения силы, действующей на интерцептор со стороны приводного звена, соединение приводного звена с внутренней поверхностью интерцептора расположено на расстоянии от оси поворота интерцептора, обеспечивающем плечо для силы, действующей на интерцептор от приводного звена, при этом многозвенный механизм имеет верхнее и нижнее дополнительные звенья, соединенные третьим шарниром между собой и с тягой; конец верхнего дополнительного звена соединен вторым шарниром с приводным звеном, а конец нижнего дополнительного звена соединен четвертым шарниром с кронштейном, закрепленным на плоскости каркаса крыла, противолежащей внутренней поверхности интерцептора.
Для обеспечения возврата интерцептора в исходное положение при отсутствии напряжения в цепях электроприводов или при срабатывании пиропатрона в случае аварийной ситуации угол между верхним дополнительным звеном и линией, соединяющей ось шарнира приводного звена и ось шарнира кронштейна при полностью поднятом интерцепторе превышает угол, определяемый по формуле
где fтр - коэффициент трения в шарнирах, соединяющих звенья.
Технический эффект - обеспечение возможности размещения электромеханического привода внутри крыла с толщиной, сопоставимой с диаметром электромеханического привода - обеспечивается следующей совокупностью отличительных признаков: устройство имеет вал, установленный в стойках, закрепленных в каркасе крыла; муфты, соединяющие концы вала с выходными звеньями электромеханического привода; по меньшей мере, один закрепленный на валу кривошип с тягой; шарнирное соединение кривошипа с первым концом тяги, второй конец которой имеет шарнирное соединение с приводным звеном интерцептора, имеющим соединение с его внутренней поверхностью.
Для соответствия момента, действующего на интерцептор со стороны приводного звена, моменту от аэродинамической силы, действующей на интерцептор в поднятом положении, соединение приводного звена интерцептора с его внутренней поверхностью является неподвижным, а угол между линией, соединяющей ось интерцептора и ось шарнирного соединения тяги со вторым концом приводного звена интерцептора и внутренней поверхностью интерцептора, находится в интервале 80…100°.
Для увеличения силы, действующей на интерцептор со стороны приводного звена, соединение приводного звена с внутренней поверхностью интерцептора является шарнирным, расположено на расстоянии от оси поворота интерцептора, обеспечивающем плечо для силы, действующей от приводного звена на интерцептор, а второй конец приводного звена имеет второе шарнирное соединение с одним концом дополнительного звена; второй конец которого шарнирно соединен с поверхностью каркаса крыла, расположенной напротив интерцептора (противолежащей внутренней поверхностью интерцептора).
Для обеспечения возврата интерцептора из поднятого положения в исходное при отсутствии напряжения в цепях электроприводов или при срабатывании пиропатрона в случае аварийной ситуации угол между приводным звеном и линией, соединяющей ось шарнира на внутренней поверхности интерцептора и ось шарнира дополнительного звена на плоскости каркаса крыла, при полностью поднятом интерцепторе превышает угол, определяемый по формуле
где fтр - коэффициент трения в шарнирах, соединяющих звенья.
Совокупность признаков устройства, обеспечивающего решение технической задачи и достижение технического эффекта, не обнаружена в ходе патентно-информационного поиска, что свидетельствует о соответствии технического решения критерию «новизна».
Данная совокупность не следует явно из известного уровня техники, изученного при проведении патентно-информационных исследований, следовательно, техническое решение соответствует критерию «изобретательский уровень».
На фиг.1 показано устройство электромеханического привода интерцептора.
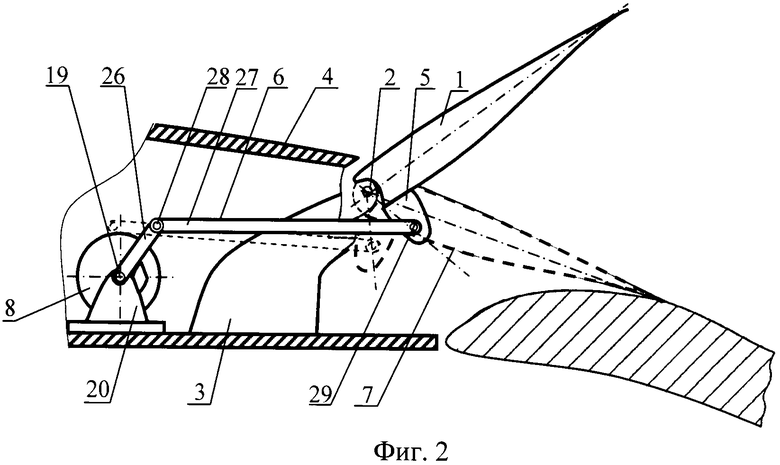
На фиг.2 - устройство электромеханического привода интерцептора, включающее многозвенный механизм, вид А на фиг.1.
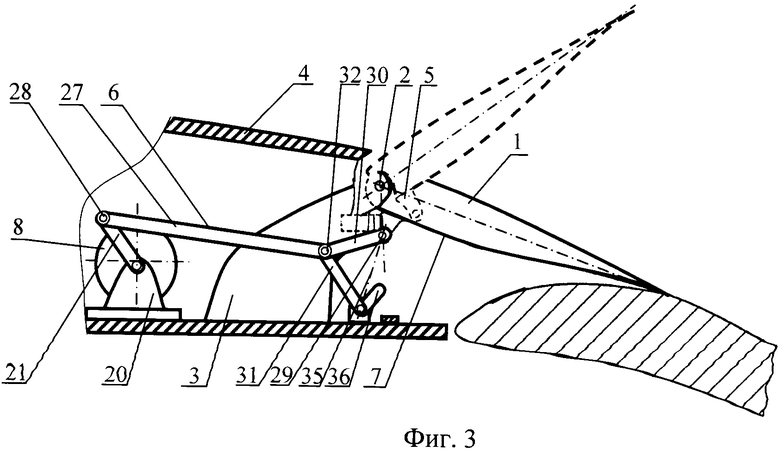
На фиг.3 - устройство электромеханического привода с многозвенным механизмом на фиг.2, имеющим два дополнительных звена, с интерцептором в исходном положении.
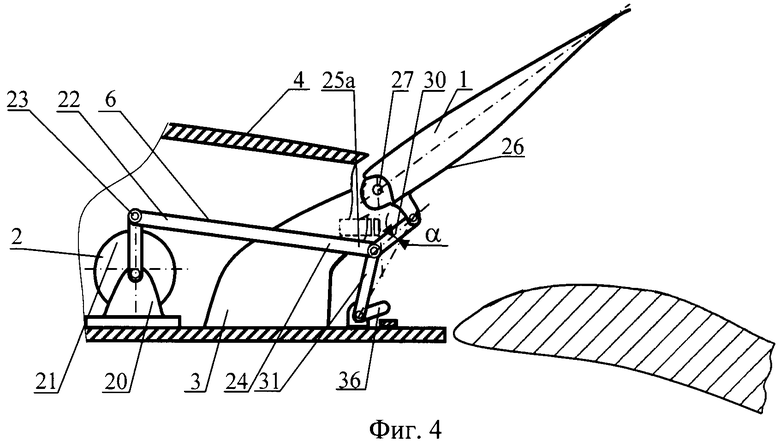
На фиг.4 - устройство электромеханического привода с многозвенным механизмом на фиг.2, имеющим два дополнительных звена, с интерцептором в поднятом положении.
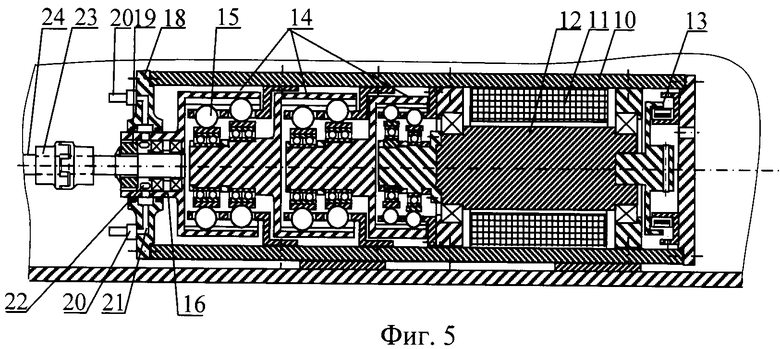
На фиг.5 - вариант конструкции одного электромеханического привода интерцептора, показанного на фиг.1.
Устройство электромеханического привода интерцептора 1 (фиг.1-5) самолета, установленного на оси 2 поворота, закрепленной в каркасе 3 крыла 4, и имеющего приводное звено 5 многозвенного механизма 6, закрепленное на внутренней поверхности 7 интерцептора 1, содержащее два электромеханических привода 8 с ведущими валами 9, установленные в каркасе 3 крыла 4; при этом каждый электромеханический привод 8 имеет: закрепленный в каркасе 3 корпус 10 (фиг.5), размещенный внутри корпуса 10 электродвигатель 11 с ротором 12, имеющим датчик 13 его углового положения; присоединенный к ротору 12 многоступенчатый волновой редуктор 14 с телами вращения 15, полый выходной вал 16 последней ступени которого соединен с ведущим валом 9 электромеханического привода 8 посредством шлицевой втулки 17, расположенной внутри полого выходного вала 16 и части ведущего вала 9; в крышке 18 корпуса 10 встроены средства аварийного выталкивания шлицевой втулки 19 из полого выходного вала 14, имеющие пиропатроны 20, соединенные каналом 21, выходящим в полость 22 к торцу шлицевой втулки 19.
Ведущие валы 9 соединены муфтами 23 с валом 24, установленным в стойках 25 (фиг.1), закрепленных в каркасе 3; на валу 24 закреплен, по меньшей мере, один кривошип 26 с тягой 27, соединенный первым шарниром 28 (фиг.2) с первым концом тяги 27, а второй конец тяги 27 соединен вторым шарниром 29 с приводным звеном 5 интерцептора 1.
Минимальная длина тяги 27 (фиг.2) определяется из условия возврата интерцептора 1 в исходное положение при отключении напряжения в сети или при срабатывании пиропатрона 20 и не должна быть менее двух радиусов кривошипа 26. При необходимости размещения электромеханического привода 8 ближе к передней части крыла 4 длину тяги 27 увеличивают.
Для создания крутящего момента, действующего на интерцептор 1 со стороны приводного звена 5, соединение приводного звена 5 с внутреннее поверхностью 7 интерцептора 1 является неподвижным, а угол между линией, соединяющей ось 2 поворота интерцептора 1 и ось второго шарнира 29, и внутренней поверхностью 7 интерцептора 1 находится в интервале 80…100°.
Для увеличения силы, действующей на интерцептор 1 со стороны приводного звена 5, соединение приводного звена 5 с внутренней поверхностью 7 интерцептора 1 расположено на расстоянии от оси поворота 2 интерцептора 1, обеспечивающем плечо для силы, действующей на интерцептор 1 от приводного звена 5 (фиг.3, 4), при этом многозвенный механизм 6 имеет дополнительные верхнее звено 30 и нижнее звено 31, соединенные третьим шарниром 32 между собой и с тягой 27; конец верхнего дополнительного звена 30 соединен вторым шарниром 29а с приводным звеном 5а, а конец нижнего дополнительного звена 31 соединен четвертым шарниром 33 с кронштейном 34, закрепленным на плоскости (лонжероне) каркаса 3 крыла 4, противолежащей внутренней поверхности 7 интерцептора 1.
Для обеспечения возврата интерцептора 1 в исходное положение при срабатывании пиропатрона 20 в случае аварийной ситуации угол между верхним дополнительным звеном 30 и линией 35 (фиг.3, 4), соединяющей оси второго шарнира 29 и четвертого шарнира 33 при полностью поднятом интерцепторе 1, превышает угол, определяемый по формуле
где fтр - коэффициент трения в шарнирах, соединяющих звенья многозвенного механизма 6. Для подобных механизмов принимают величину угла α=3…7°. Для ограничения угла поворота звеньев 30 и 31 и интерцептора 1 звено 34 имеет упор 36.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЗАКРЫЛКА САМОЛЕТА | 2012 |
|
RU2515014C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ПРЕДКРЫЛКА САМОЛЕТА | 2012 |
|
RU2522635C2 |
| УПРАВЛЯЕМОЕ КРЫЛО ПРОПЕЛЛЕРНОГО ТИПА | 2015 |
|
RU2583426C1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| РЕКЛАМНО-ИНФОРМАЦИОННЫЙ СТЕНД | 2004 |
|
RU2267165C1 |
| Механизм локтевого шарнира | 1982 |
|
SU1024080A1 |
| Механизм компенсации продольных смещений ведущего моста | 2017 |
|
RU2674966C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| РЫЧАЖНО-КУЛАЧКОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2011071C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
Изобретение относится к электротехнике и может быть применено в приводах аэродинамических поверхностей летательных аппаратов. Устройство электромеханического привода интерцептора крыла самолета установлено на оси поворота, закрепленной в каркасе крыла, и имеет приводное звено многозвенного механизма, закрепленное на внутренней поверхности интерцептора. Устройство содержит многозвенный механизм, имеющий приводной вал, установленный в стойках, закрепленных в каркасе крыла, концы которого соединены муфтами с ведущими валами. По меньшей мере, один закрепленный на приводном валу кривошип с тягой соединен шарниром с первым концом тяги, второй конец которой имеет шарнир для соединения с приводным звеном интерцептора. Достигается возможность размещения электромеханического привода внутри крыла. 3 з.п. ф-лы, 5 ил.
1. Устройство электромеханического привода интерцептора крыла самолета, установленного на оси поворота, закрепленной в каркасе крыла, и имеющего приводное звено многозвенного механизма, закрепленное на внутренней поверхности интерцептора, содержащее два электромеханических привода с ведущими валами, установленные в каркасе крыла; соединения многозвенного механизма с ведущими валами электромеханических приводов, при этом каждый электромеханический привод имеет закрепленный в каркасе крыла корпус; размещенный внутри корпуса электродвигатель с ротором, имеющим датчик его углового положения; присоединенный к ротору многоступенчатый волновой редуктор с телами вращения, полый выходной вал последней ступени которого соединен с ведущим валом электромеханического привода посредством шлицевой втулки, расположенной внутри полого выходного вала и части ведущего вала; средства выталкивания шлицевой втулки из полого выходного вала последней ступени редуктора, имеющие пиропатроны, соединенные каналом, выходящим к торцу шлицевой втулки, отличающееся тем, что многозвенный механизм имеет: приводной вал, установленный в стойках, закрепленных в каркасе крыла, концы которого соединены муфтами с ведущими валами; по меньшей мере, один закрепленный на приводном валу кривошип с тягой, соединенный первым шарниром с первым концом тяги, а второй конец тяги соединен вторым шарниром с приводным звеном интерцептора.
2. Устройство по п.1, отличающееся тем, что соединение приводного звена с внутренней поверхностью интерцептора является неподвижным, а угол между линией, соединяющей ось поворота интерцептора и ось второго шарнира, и внутренней поверхностью интерцептора находится в интервале 80…100°.
3. Устройство по п.2, отличающееся тем, что соединение приводного звена с внутренней поверхностью интерцептора расположено на расстоянии от оси поворота интерцептора, обеспечивающем плечо для силы, действующей на интерцептор от приводного звена, при этом многозвенный механизм имеет верхнее и нижнее дополнительные звенья, соединенные третьим шарниром между собой и с тягой; конец верхнего дополнительного звена соединен вторым шарниром с приводным звеном, а конец нижнего дополнительного звена соединен четвертым шарниром с кронштейном, закрепленным на плоскости каркаса крыла, противолежащей внутренней поверхности интерцептора.
4. Устройство по п.3, отличающееся тем, что угол между верхним дополнительным звеном и линией, соединяющей оси второго и четвертого шарниров при полностью поднятом интерцепторе превышает угол, определяемый по формуле
 ,
,
где f
тр
- коэффициент трения в шарнирах, соединяющих звенья многозвенного механизма.
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ САМОЛЕТА | 2010 |
|
RU2442721C1 |
| ИНТЕРЦЕПТОР ДЛЯ ОБТЕКАЕМОЙ ЧАСТИ ПЛАНЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2452657C2 |
| US 4575027 A, 11.03.1986 | |||
| US 2001042811 A1, 22.11.2001 | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| GB 612462 A, 12.11.1948 | |||
| Резистивный датчик заданной температуры | 1980 |
|
SU877353A1 |

