Изобретение относится к области летательных аппаратов с машущими крыльями (ЛАМК).
В настоящее время существует множество различных патентных решений.
Известен МАХОЛЕТ (патент РФ на изобретение №2369526, дата приоритета 22.04.2008), который относится к авиационной технике, в частности к машущекрылым летательным аппаратам (МЛА), использующим в полете машущие крылья для создания подъемной силы и тяги. Махолет состоит из двух крыльев, расположенных зеркально на одной базовой оси и закрепленных шарнирно, имеющих внешний каркас, соединенный шатунами с приводом, состоящим из кривошипа и коромыслового механизма. Площадь крыла внутри каркаса состоит из сегментов, каждый сегмент имеет по своему центру ось, закрепленную концами к каркасу крыла в лобовой и хвостовой его частях с возможностью поворота. Все концы осей сегментов крыла объединены между собой с помощью горизонтальных рычагов и посредством шатунов и вертикальных рычагов связаны с механизмом, состоящим из шатунов, кривошипа и коромыслового механизма. При движении крыльев вверх все сегменты крыльев имеют возможность поворачиваться на угол 90° относительно плоскости крыльев с помощью горизонтальных рычагов посредством шарниров и вертикальных рычагов. При движении крыльев вниз все сегменты крыльев имеют возможность поворачиваться в исходное положение и составляют площадь крыльев для захвата воздушной массы. Достигается уменьшение сопротивления МЛА со стороны воздушной массы при движении крыла вверх и увеличение подъемной силы при движении крыла вниз. Недостатком данного изобретения являются присутствие колебательных движений, в результате которых, при увеличении площади крыла, силы инерции увеличиваются на каждый метр длины крыла в квадрате, при этом прочность лонжерона крыла в основании должна быть увеличена в кубе. В итоге современная прочность металла и композиционных материалов не позволяет создать крыло больших размеров.
Известен так же МАХОЛЕТ (патент РФ на изобретение №2451623, дата приоритета 28.12.2010) Махолет содержит корпус, шарнирно закрепленные на корпусе два крыла, расположенные друг напротив друга относительно продольной оси корпуса. Крылья установлены с возможностью махового движения посредством приводного механизма, содержащего поршневой двигатель. Крылья соединены друг с другом посредством упругого элемента, образуя с ним единую колебательную систему махолета. Колебательная система выполнена с возможностью изменения ее жесткости в процессе полета и включает упругий элемент постоянной жесткости и упругий элемент переменной регулируемой жесткости. Упругий элемент постоянной жесткости колебательной системы махолета выполнен в виде поперечной рессоры, соединяющей левое и правое крылья. Упругий элемент переменной регулируемой жесткости выполнен в виде двухстороннего пневмоцилиндра, на верхнем штоке которого закреплена рессора, а нижний шток соединен с поршнем двухтактного двигателя.
Недостатком данного изобретения являются присутствие колебательных движений, в результате которых, при увеличении площади крыла, силы инерции увеличиваются на каждый метр длины крыла в квадрате, при этом прочность лонжерона крыла в основании должна быть увеличена в кубе. В итоге современная прочность метала и композиционных материалов не позволяет создать крыло больших размеров.
Наиболее близким по технической сущности (прототипом) является МАХОЛЕТ (патент РФ на изобретение №2412083, дата приоритета 20.01.2009) Махолет имеет двигатель, две пары крыльев, расположенные по двум сторонам махолета и закрепленные на силовом валу двигателя, рычаг ручного управления положением управляющих стержней, совмещенных с направляющими канавками барабанов, перемещающихся по продольной оси силового вала. Барабаны соединены с парами крыльев при помощи штанг. Достигается повышение маневренности махолета.
Недостатком данного изобретения являются присутствие колебательных движений, в результате которых, при увеличении площади крыла, силы инерции увеличиваются на каждый метр длины крыла в квадрате, при этом прочность лонжерона крыла в основании должна быть увеличена в кубе. В итоге современная прочность метала и композиционных материалов не позволяет создать крыло больших размеров.
В реальности данная схема крыла может быть реализована только при малых размерах крыла, где присутствует меньшая величина силы инерции. В настоящее время не существует на столько прочных материалов, чтобы создать крыло большой площади.
Техническое решение направлено на устранение указанных недостатков и достигается за счет того, что вместо колебательных движений используются вращательные, при этом массы противоположных крыльев относительно оси вращения уравновешены. При таких условиях можно создать крылья большей площади с изменяемой проекцией площади.
Технической задачей, на решение которой направлено заявленное изобретение, является создание управляемого крыла пропеллерного типа. Предлагаемая схема крыла приводит к минимуму вредные силы инерции, возникающие при движении крыла по круговой траектории, что способствует созданию крыла маха большей площади.
Крыло состоит из крыла маха и крыла взмаха, содержит полотно парусины и два фигурных, зеркально расположенных друг относительно друга лонжерона крыла маха и крыла взмаха. Ось лонжерона свободно вращается в удлиненной втулке, внешний конец которой, жестко прикреплен к платформе боковой прямоугольной рамы. При этом, внешний боковой край платформы (левый и правый) жестко прикреплены к вертикальному стержню боковой рамы, а к верхнему и нижнему поперечному стержню боковой рамы жестко прикреплен горизонтально-удлиненный, а также горизонтально-укороченный стержни так, чтобы при виде сверху образовалась геометрическая фигура в виде перевернутой трапеции с углом наклона ее боковой стороны - к центру фигуры - на угол, равный 14°±0,5°. При этом при виде спереди, образовалась геометрическая фигура в виде прямоугольного каркаса крыла. Лонжерон крыла маха и взмаха содержит: центральный стержень, в котором, перпендикулярно к его поверхности, жестко прикреплена ось лонжерона, причем, к внешнему концу ее жестко прикреплено зубчатое колесо лонжерона. Боковой стержень лонжерона своим внутренним концом жестко закреплен с внешним концом центрального стержня лонжерона с углом наклона от линии его поверхности в сторону оси лонжерона и на углы, равные 14°±0,5°. Для образования на внешнем крае поверхности крыла маха и крыла взмаха «козырьков» внешние края боковых стержней отогнуты на углы, равные 60°. Период маха крыла определен сектором окружности от 0° до π радиана (от 0° до 180°), а период взмаха крыла определен сектором окружности от π до 2π радиана (от 180° до 360°).
Для работы крыла, при помощи которого осуществляются элементы полета (маневры), предусмотрены три его режима: первый (основной) - «пропеллерный» режим крыла; второй (промежуточный) - «пропеллерно-пружинный» режим крыла; третий - «беспропеллерно-пружинный» режим крыла (полет безмоторного планирования). Изобретение поясняется чертежами.
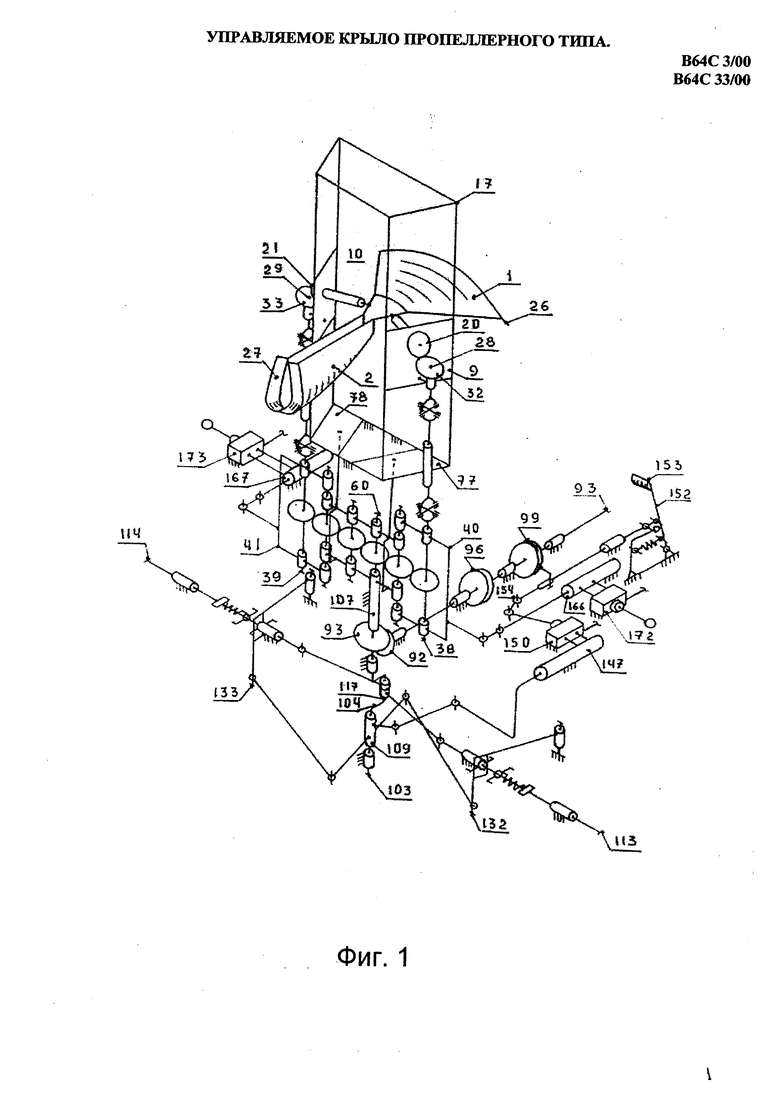
На Фиг. 1 изображена общая схема управляемого крыла пропеллерного типа.
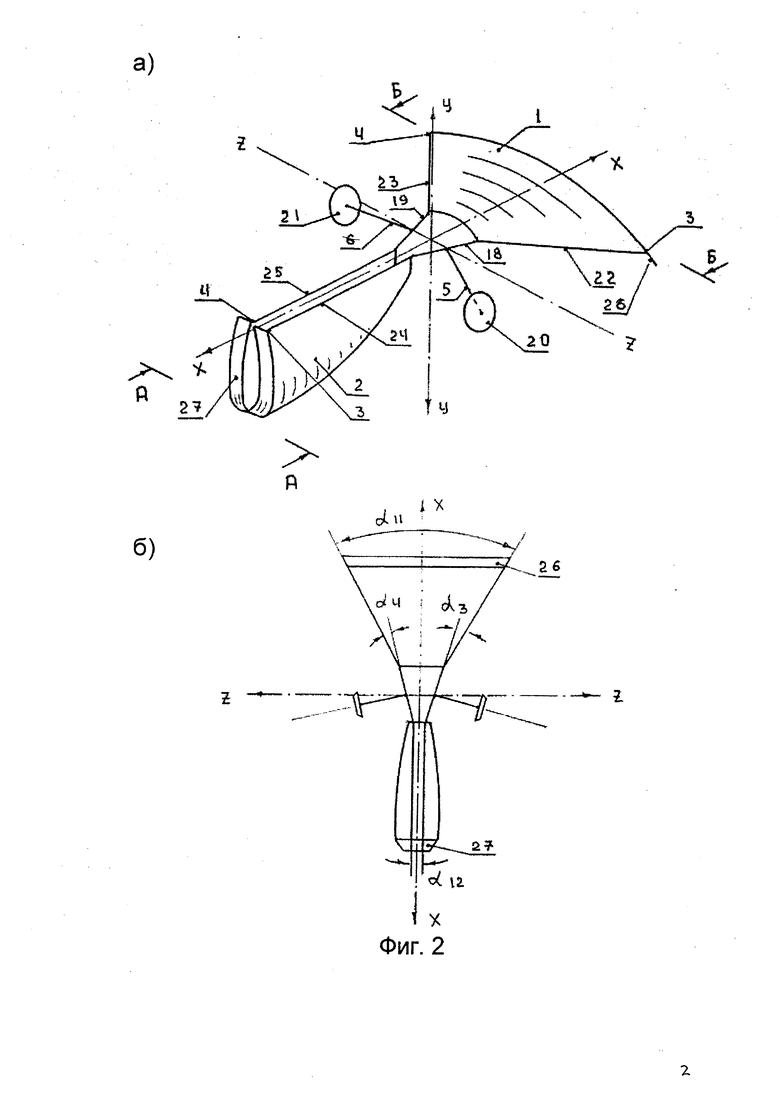
На Фиг. 2а изображена схема крыла в горизонтальном положении
На Фиг. 2б изображена схема крыла (вид сверху относительно оси Х-Х)
На Фиг. 3а изображена схема размещения лонжеронов в каркасе крыла.
На Фиг. 3б изображена схема размещения лонжеронов в каркасе крыла (вид сверху).
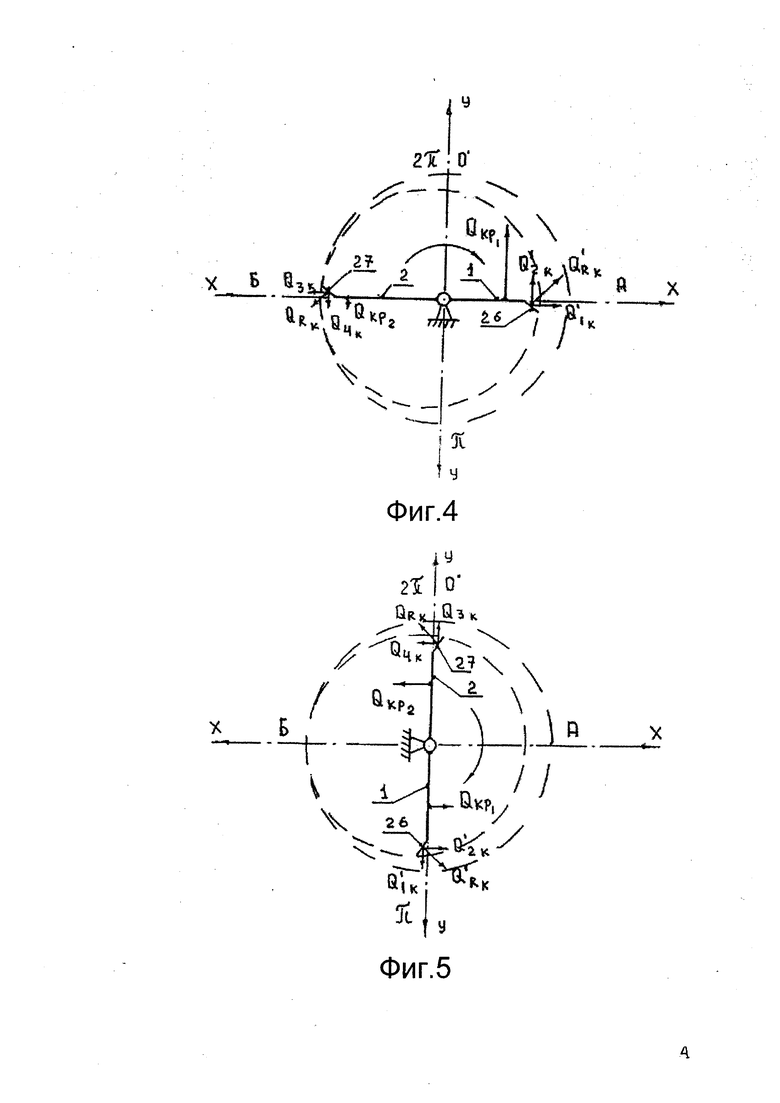
На Фиг. 4 изображена траектория движения крыла маха и взмаха (вид сбоку) относительно оси Х-Х.
На Фиг. 5 изображена траектория движения крыла маха и взмаха (вид сбоку) относительно оси Y-Y.
На Фиг. 6а схема крыла в вертикальном положении
На Фиг. 6б изображена схема крыла (вид спереди) относительно оси Y-Y.
На Фиг. 7а изображена схема соединения левого лонжерона с левым механизмом «П»-образной рамы посредством лонжеронного звена
На Фиг. 7б изображена схема соединения правого лонжерона с правым механизмом «П»-образной рамы посредством лонжеронного звена
На Фиг. 8 изображена связь между механизмом реверса и трехрежимным механизмом.
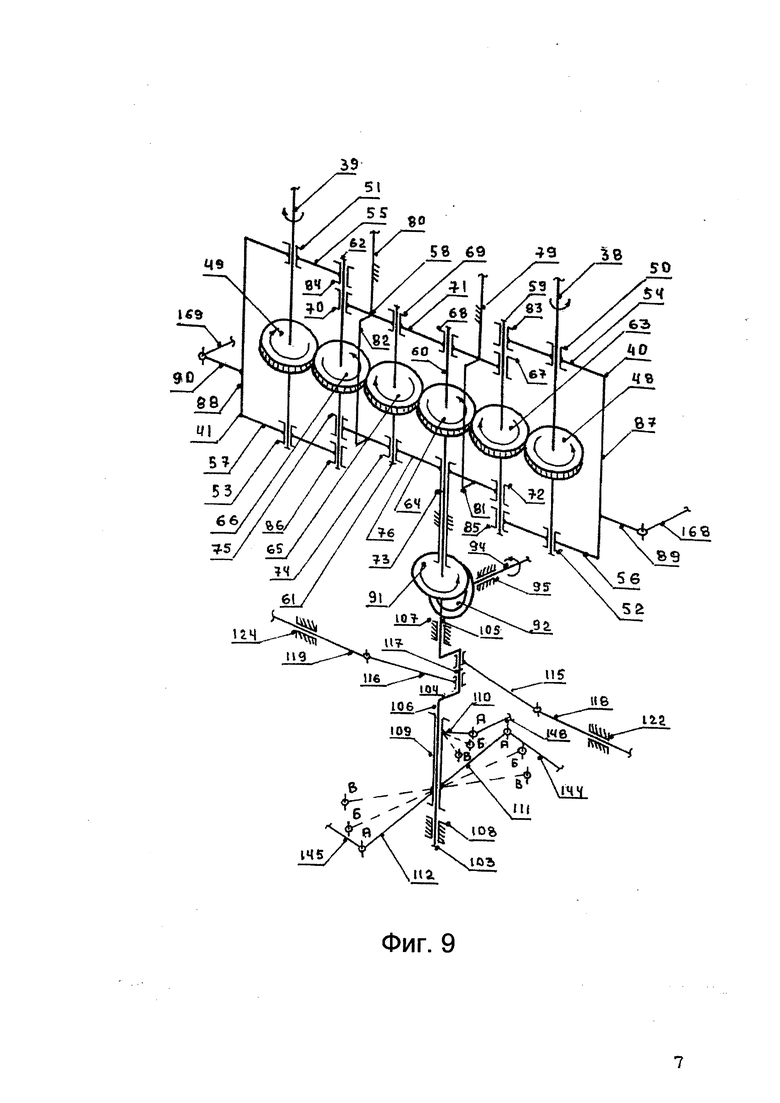
На Фиг. 9 показана взаимосвязь главной промежуточной оси механизма реверса с вертикальным звеном коленчатого вала и их механизмы.
На Фиг. 10а представлен общий вид трехрежимного механизма в «пропеллерном» режиме крыла.
На Фиг. 10б представлен общий вид трехрежимного механизма в «пропеллерно-пружинном» режиме крыла.
На Фиг. 11 представлен общий вид трехрежимного механизма в «беспропеллерно-пружинном» режиме крыла.
На Фиг. 12 изображено исходное полетное положение лонжеронов относительно оси X-X и исходное положение механизмов их «П»-образных рамок относительно оси Z-Z. На Фиг. 13 изображено измененное полетное положение лонжеронов с углом наклона вверх относительно оси X-X и измененное положение механизмов их «П»-образных рамок относительно оси Z-Z.
На Фиг. 14 изображено измененное полетное положение лонжеронов с углом наклона вниз относительно оси X-X и измененное положение механизмов их «П»-образных рамок относительно оси Z-Z.
На Фиг. 15а изображена максимальная вогнутость парусины крыла в середине периода взмаха.
На Фиг. 15б изображена минимальная вогнутость парусины крыла в середине периода маха.
На Фиг. 16а изображено изменение положения парусины крыла при измененном положении правого лонжерона вверх.
На Фиг. 16б изображено изменение положения парусины крыла при измененном положении левого лонжерона вверх.
На Фиг. 17а), б), в) изображено изменение биссектрисной длины крыла в трех позициях.
На Фиг. 18 изображена работа трехрежимного механизма в «пропеллерно-пружинном» режиме крыла в положении шейки коленчатого вала, равного 0° (исходного положения) и в положении шейки коленчатого вала, развернутого на 360° от нулевого.
На Фиг. 19 изображена работа трехрежимного механизма в «пропеллерно-пружинном» режиме крыла в положении шейки коленчатого вала, развернутого на 90° по часовой стрелки от исходного.
На Фиг. 20 изображена работа трехрежимного механизма в «пропеллерно-пружинном» режиме крыла в положении шейки коленчатого вала, развернутого на 180° от исходного.
На Фиг. 21 изображена работа трехрежимного механизма в «пропеллерно-пружинном» режиме крыла в положении шейки коленчатого вала, развернутого на 270° от исходного.
На Фиг. 22 изображена траектория движения крыла маха и взмаха (вид сбоку) относительно оси Х-Х при работе трехрежимного механизма в «пропеллерно-пружинном» режиме крыла в положении шейки коленчатого вала, равному 0° (исходного положения) и в положении шейки коленчатого вала, развернутого на 360° от исходного.
На Фиг. 23 изображена траектория движения крыла маха и взмаха (вид сбоку) относительно оси Y-Y при работе трехрежимного механизма в «пропеллерно-пружинном» режиме крыла в положении шейки коленчатого вала, развернутого на 90° по часовой стрелки от исходного.
На Фиг. 24 изображена траектория движения крыла маха и взмаха (вид сбоку) относительно оси Х-Х при работе трехрежимного механизма в «пропеллерно-пружинном» режиме крыла в положении шейки коленчатого вала, развернутого на 180° по часовой стрелки от исходного.
На Фиг. 25 изображена траектория движения крыла маха и взмаха (вид сбоку) относительно оси Y-Y при работе трехрежимного механизма в «пропеллерно-пружинном» режиме крыла в положении шейки коленчатого вала, развернутого на 270° по часовой стрелки от исходного.
Описание схемы крыла маха и крыла взмаха.
Крыло состоит из крыла маха (1) и крыла взмаха (2) и содержит полотно парусины 1 и 2, Фиг. 2; правый 3 и, зеркально расположенный ему, левый 4 фигурный лонжерон крыла (далее - лонжерон) крыла маха (1) и крыла взмаха (2); ось лонжерона 5 и 6, Фиг. 3б), свободно вращающаяся в удлиненной втулке 7 и 8, внешний конец которой, жестко прикреплен к внутренней поверхности платформы 9 и 10, боковой прямоугольной рамы (далее - боковая рама) 11 и 12, Фиг. 3а) причем, внешний боковой край платформы (левый и правый) жестко прикреплены к вертикальному стержню боковой рамы 11 и 12, а к верхнему и нижнему поперечному стержню боковой рамы 11 и 12, Фиг. 3а) и б) жестко прикреплен горизонтально-удлиненный 13 и 14, а также горизонтально-укороченный 15 и 16 стержень так, чтобы при виде сверху образовалась геометрическая фигура в виде перевернутой трапеции с углом наклона ее боковой стороны - к центру фигуры - на угол α1 и α2, равный 14°±0,5°, причем, при виде спереди, образовалась геометрическая фигура в виде прямоугольного каркаса крыла 17. Лонжерон крыла маха и взмаха 3 и 4, Фиг. 2а) содержит: центральный стержень 18 и 19, в котором, перпендикулярно к его поверхности, жестко прикреплена ось лонжерона 5 и 6, причем, к внешнему концу ее жестко прикреплено зубчатое колесо лонжерона 20 и 21. Боковой стержень лонжерона 22, 23 и 24, 25, Фиг. 6б), своим внутренним концом жестко закреплен с внешним концом центрального стержня лонжерона 18 и 19, с углом наклона от линии его поверхности в сторону оси лонжерона 5 и 6, на углы: α3, α4, α5, α6, равные 14°±0,5°, причем, для образования на внешнем крае поверхности крыла маха (1) и крыла взмаха (2) в виде «козырька» 26 и 27, загнутого в сторону движения крыла, при этом внешний край бокового стержня 22, 23, 24, 25 отогнут на углы: α7, α8, α9, α10, равные 60°, Фиг. 3а). Период маха крыла (1), Фиг. 5, определен сектором окружности от 0° до π: радиана (от 0° до 180°), а период взмаха крыла (2) определен сектором окружности от π до 2π радиана (от 180° до 360°). Нахождение крыла маха (1) и крыла взмаха (2), между периодом маха и периодом взмаха, показано на Фиг. 5 и Фиг. 6а), б). Конструкционно крыло маха (1) и крыло взмаха (2) содержит лонжероны 3 и 4, которые в полетном положении расположены зеркально друг к другу и в одной горизонтальной плоскости и изображены в середине периода маха и периода взмаха на Фиг. 2а), б) и Фиг. 3а), б), при этом max угол «развала» крыла маха α11 между боковым стержнем лонжерона 22, 23 - в указанном положении - составляет величину равную 56°±2°, одновременно с этим угол «развала» крыла взмаха α12 между боковым стержнем лонжерона 24, 25 - в указанном положении - составляет величину равную 0°±2°. При этом внешние края боковых стержней 22, 23, 24 и 25 загнуты в сторону движения лонжеронов на угол равный 60°.
Описание схемы лонжеронного звена привода крыла.
Лонжеронное звено привода крыла маха (1) и крыла взмаха (2) (далее - лонжеронное звено) 28 и 29, Фиг. 7а) и б) содержит: ось 30 и 31, к внешнему (верхнему) концу которой, жестко прикреплено зубчатое колесо 32 и 33, образующее зубчатую колесную пару с зубчатым колесом лонжерона: правую - 20 и 32; левую - 21 и 33; эти зубчатые колесные пары расположены друг к другу под углом 90°. Ось 30 и 31, Фиг. 7а), б) имеет свободное вращение во втулке 34 и 35, корпус которой посредством кронштейна 36 и 37, жестко прикреплен к внешней поверхности платформы 9 и 10. Внутренний конец оси 30 и 31, Фиг. 7а) и б) соединен с осью 38 и 39 механизма «П»-образной рамы 40 и 41, промежуточным звеном, состоящим из верхнего карданного механизма 42 и 43, телескопической оси 44 и 45, а также нижнего карданного механизма 46 и 47, причем, к средней оси механизма «П»-образной рамы, жестко прикреплено обкатное зубчатое колесо 48 и 49, которое - вместе со своей осью - свободно вращается в верхней 50, 51 и нижней 52, 53 втулке, при этом, данная втулка своим корпусом жестко прикреплена к средней части нижнего горизонтального стержня-шарнира 56, 57, а верхняя втулка - к средней части верхнего горизонтального стержня-шарнира 54, 55.
Описание схемы распределительного реверса и механизма «П»-образной рамы.
Распределительный реверс, Фиг. 8 и Фиг. 9, содержит: прямоугольную раму (далее - рама реверса) 58 и вертикально расположенных в ней осях: правая промежуточная 59; главная промежуточная 60; первая левая промежуточная 61; вторая левая промежуточная 62, к средней части которой прикреплены зубчатые колеса: правое промежуточное 63; верхнее главное промежуточное 64; первое левое промежуточное 65; второе левое промежуточное 66, ось которого свободно вращается в верхней втулке 67, 68, 69, 70 жестко закрепленной своим корпусом к верхнему горизонтальному стержню рамы реверса 71, а также свободно вращающейся в нижней втулке 72, 73, 74, 75, жестко прикрепленной своим корпусом к нижнему горизонтальному стержню рамы реверса 76, причем, верхний горизонтальный стержень рампы реверса 71 жестко прикреплен к нижней платформе каркаса крыла 77 и 78, вертикальным стержнем 79 и 80, Фиг. 7; а верхний 71 и нижний 76 горизонтальные стержни рамы реверса 58, Фиг. 9 жестко соединены между собой внешними концами вертикального «С»-образного стержня 81 и 82. Внешний конец правой промежуточной оси 59 и внешний конец второй левой промежуточной оси 62 распределительного реверса, Фиг. 9, имеет выход за пределы верхней 67, 70 и нижней 72, 75 втулки, где на внешнем ее конце дополнительно расположена верхняя втулка 83, 84 и нижняя втулка 85, 86, к внешней боковой стороне которой жестко прикреплен свободный конец горизонтального стержня-шарнира: верхний 54, 55; нижний 56, 57 механизма «П»-образной рамы 40 и 41. К внешней стороне вертикального стержня 87 и 88, механизма «П»-образной рамы 40 и 41, Фиг. 9, жестким образом прикреплен горизонтальный рычаг (далее - рычаг рамы) 89 и 90. Главная промежуточная ось 60, Фиг. 9, имеет удлинение в сторону оси 105, к нижней части которой прикреплено ведомое зубчатое колесо 91, образуя при этом зубчатую колесную пару с ведущим зубчатым колесом 92, звена главного привода 93, Фиг. 10а) и расположенные друг к другу под прямым углом равным 90°.
Описание схемы звена главного привода крыла.
Звено главного привода 93, Фиг. 10а), содержит: ось (ведущего) зубчатого колеса 94, свободно вращающегося во втулке 95, внешний конец которой жестко соединен с (ведущим) зубчатым колесом 92, а противоположный ее конец жестко соединен с демпфирующим механизмом 96. Промежуточная ось 97 звена главного привода 93, Фиг. 10а), свободно вращающаяся во втулке 98, один конец которой жестко прикреплен к демпфирующему механизму 96, другим же концом она жестко прикреплена к механизму муфты 99. Ведущая ось 100, Фиг. 10а), звена главного привода 93, свободно вращается во втулке 101, один конец которой жестко соединен с механизмом муфты 99, другой же ее конец имеет продолжение к главному приводу двигателя крыла (на схеме он не показан). Механизм муфты 99, Фиг. 10а), имеет рычаг «Г»-образной формы 102 жестко прикрепленный к боковой стенке данной муфты.
Описание схемы звена коленчатого вала.
Вертикальное звено коленчатого вала 103, Фиг. 9 и Фиг. 10а), состоит из: коленчатого вала 104; его верхней укороченной оси 105 и нижней удлиненной оси 106, которая свободно вращается во втулке 107 и 108, при этом, его верхняя укороченная ось является продолжением главной промежуточной оси 60. На нижней удлиненной оси 106, Фиг. 10а), коленчатого вала 104, расположена свободно вращающаяся втулка 109, к верхней части которой жестко прикреплен рычаг (ведущий) 110, а к ее нижней части жестко закреплен рычаг (ведомый) 111 и 112 симметрично расположенный по обе стороны данной втулки, как бы, лежащие на одной прямой линии, которая, в свою очередь, если смотреть на втулку сверху, расположена перпендикулярно к рычагу (ведущему) 110.
Описание схемы правого и левого звена горизонтально расположенного трехрежимного механизма.
Горизонтально расположенный трехрежимный механизм, Фиг. 8, Фиг. 9 и Фиг. 10а), расположен перпендикулярно звену главного привода 93 и содержит: правое звено 113 и зеркально расположенный ему, на противоположной стороне звена коленчатого вала 103 - левое звено 114. Звено 113 и 114 содержит: шатун 115 и 116, который одним своим концом шарнирно соединен с шейкой 117 коленчатого вала 104, а другим своим концом он шарнирно соединен с внутренним концом подвижного стержня 118 и 119, к средней части которого жестко прикреплен упор 120 и 121. Подвижной стержень 118, Фиг. 8.., Фиг. 10а), свободно перемещается во втулке 122 и 123, а противоположно расположенный ему подвижной стержень 119, свободно перемещается во втулке 124 и 125, при этом, к внешнему краю втулки 122 и 124 жестко закреплен втулочный ограничитель 126 и 127. Внешний конец подвижного стержня 118 и 119, Фиг. 10а), выступает за внешний край втулки 123 и 125 на длину, превышающую диаметр окружности обозначенной буквой «Г», Фиг. 10б), т.е. описываемой шейкой коленчатого вала 117 при развороте ее на угол от 0° до 2π радиана (0°-360°). К внутренней стороне упора 120 и 121, Фиг. 10а), одним своим концом жестко закреплена пружина сжатия (демпфирующая пружина) 128 и 129, причем, к другому ее концу жестко прикреплен пружинный ограничитель 130 и 131, который в «пропеллерном» режиме крыла, удален от втулочного ограничителя 126 и 127, - вдоль поверхности подвижного стержня 118 и 119 - на длину, превышающую диаметр окружности, обозначенной буквой «Г», Фиг. 10б). Параметр пружины сжатия - λ (длина полного сжатия) 128 и 129, Фиг. 10а), должен превышать диаметр окружности обозначенной буквой «Г», Фиг. 10б)
Описание схемы режимного звена трехрежимного механизма.
Разжимное звено 132 и 133, Фиг. 10а), имеет «Г»-образную фигуру, где в месте его сгиба представлена фигура в виде прямоугольной рамки 134 и 135; внешний вертикальный стержень 136 и 137 имеет удлинение вниз, причем, его горизонтальный стержень 138 и 139 своим внешним концом жестко прикреплен к наружное стороне втулки 140 и 141, свободно вращающейся на вертикально расположенной оси 142 и 143. Через внутреннее окно рамки 134 и 135, Фиг. 10а), свободно проходит тело подвижного стержня 118 и 119, при этом, в «пропеллерном» режиме крыла она (рамка) прижата к внутреннему ограничителю 126 и 127. Свободный конец рычага (ведомого) 111 и 112, Фиг. 10а), шарнирно соединен со свободным концом внешнего вертикального стержня 136 и 137 промежуточной тягой 144 и 145.
Описание схемы управления звеном трехрежимного механизма.
Рычаг (ведущий) 110, Фиг. 10а), шарнирно соединенный со штоком 146, гидроцилиндра трехрежимного механизма (далее - гидроцилиндр) 147 посредством тяги 148, а управление гидроцилиндром в этом случае осуществляется трехпозиционным рычагом 149, гидравлического переключателя золотникового типа 150, питающегося гидравлической жидкостью от общего источника давления по трубопроводу 151. Трехпозиционный рычаг 149, Фиг. 10а), внешним своим концом шарнирно соединен с вертикальным педальным рычагом 152, горизонтального трехрежимного механизма вертикального педального рычага 153, через промежуточное звено 154, которое содержит: внутреннее звено 155; комбинированную тягу 156, свободно проходящую через втулку 157 и внешнее звено 158. Комбинированная тяга 156, Фиг. 10а), содержит в себе кольцо удлиненной формы 159, в которое свободно входит вертикальный стержень 160 «Г»-образного рычага муфты 102, причем, в «пропеллерном» режиме крыла он находится у внешней стороны кольца 159. Механизм вертикального педального рычага 153, Фиг. 10а), содержит: педальный рычаг 152, который нижним своим концом шарнирно присоединен к корпусу крыла; пружину растяжения 161, которая одним своим концом шарнирно соединена со средней частью вертикального педального рычага 152, а другим своим концом шарнирно соединена с вертикальным стержнем 162 «Г»-образного звена-упора 163, осуществляющая прижатие, - в «пропеллерном» режиме крыла - вертикального педального рычага 152 к свободному концу горизонтального стержня «Г»-образного звена-упора 163.
Описание схемы управления механизмом «П»-образной рамы.
Свободный конец рычага 89 и 90 механизма «П»-образной рамы 40 и 41, Фиг. 12, шарнирно соединен со штоком 164 и 165 гидроцилиндра 166 и 167 посредством звена 168 и 169, при этом, управление им осуществляется нажимным трехпозиционным рычагом 170 и 171 гидравлического переключателя золотникового типа 172 и 173, питающегося гидравлической жидкостью от общего источника давления, поступающего по трубопроводу 174 и 175.
Далее следует описание работы крыла в разных режимах.
Описание первого режима крыла - «пропеллерного» режима.
При горизонтальном (нейтральном) положении нажимного рычага 170, 171, Фиг. 12, гидравлический переключатель золотникового типа 172, 173 дает команду исполнительному механизму в виде гидроцилиндра 166, 167, а вместе с ним и его выдвижному штоку 164, 165 совместно со звеном 168, 169, далее через рычаг 89, 90 на фиксацию механизма «П»-образной рамы в данном положении - 40, 41, шарнирно соединенной с осью 59, 62, в положение, при котором ее продольное направление будет совпадать с продольным направлением поперечной оси координаты Z-Z, то есть, угол отклонения β механизма «П»-образной рамы: в положение - влево (+β) или в положение - вправо (-β), относительно линии положения поперечной оси координаты Z-Z должен равняться 0°. При этом, за счет взаимного расположения зубчатого колеса 48, 63 и 49, 66 ось 38, 39 механизма «П»-образной рамы 40, 41 и лонжеронного звена привода крыла 28, 29 показывает одновременное совпадение по направлению продольной «биссектрисной» оси крыла (1) и (2), Фиг. 2а), Фиг. 12, - при нахождении их (крыльев) в середине периода маха и в середине периода взмаха - с продольной линией координатной оси X-X, т.е., в данном случае, угол отклонения (±α) между фактической продольной «биссектрисной» осью крыла маха (1) и крыла взмаха (2) и координатной осью X-X равен 0°, в результате чего появляется максимальное (max) значение величины результирующего профильного сопротивления Qрез(α), Фиг. 4. При полученном максимальном значении величины профильного сопротивления крыла маха (1) Qкр1(α)max и одновременно полученного минимального значения величины профильного сопротивления крыла взмаха (2) - Qкр2(α)min, где: Qрез(α)=Qкр1(α)max-Qкр2(α)min, и при соответствующей балансировке летательного аппарата (ЛАМК) получим, на определенных оборотах оси лонжерона 5 и 6 - либо висение его на месте, либо движение его в виде вертикального подъема вверх, либо движение его в виде вертикального снижения вниз, причем, при пересечении крылом маха (1) и крылом взмаха (2) координатной оси Y-Y результирующее профильное сопротивление - Qрез(α)=Qкр1(α)-Qкр2(α) - достигает минимального значения, Фиг. 5. При изменении положения нажимного рычага 170, 171 от исходного (нейтрального) вверх гидравлический переключатель 172, 173 дает команду на разворот механизма «П»-образной рамы 40, 41 от первоначального положения, Фиг. 12, на угол (+β), Фиг. 13, В это время, при перемещении механизма «П»-образной рамы 40, 41 вокруг оси 59, 62, происходит обкатывание зубчатого колеса 63 зубчатым колесом 48 с вращением его оси 38, а также одновременно происходит обкатывание зубчатого колеса 66 зубчатым колесом 49 с вращением оси 39. Далее вращающаяся ось 38 через лонжеронное звено привода крыла 28 передает свое вращение на ось лонжерона 5, а вращение оси 39 - через лонжеронное звено привода крыла 29 - передается на ось лонжерона 6. В результате такого одновременного вращения оси лонжерона 5 и 6, Фиг. 13, лонжерон крыла маха и лонжерон крыла взмаха 3 и 4 отклоняют свою «биссектрисную» ось X1-X1, образованную боковым стержнем 22, 23, - вверх на угол атаки крыла (+α), причем, возникшее при этом линейное удлинение и угловое искривление правого лонжеронного звена привода крыла 28, обеспечивает его обычное рабочее функционирование за счет применения в нем верхнего 42 и нижнего 46 карданного механизма и телескопической оси 44, Фиг. 12, а возникшее одновременно с этим линейное удлинение и угловое искривление левого лонжеронного звена привода крыла 29, обеспечивает его обычное рабочее функционирование за счет применения в нем верхнего 43 и нижнего 47 карданного механизма и телескопической оси 45, причем, такое положение лонжеронов крыла маха и лонжеронов взмаха позволяет, - при соответствующей (прежней) балансировке летательного аппарата (ЛАМК) и при определенных оборотах оси лонжерона 5 и 6, Фиг. 13, - перейти ЛАМКу от режима висения на месте к полету в обратную сторону (назад) как с набором высоты, так и со снижением, а при наличии его поступательного движения (полета) изменить траекторию полета вверх. В случае изменения положения нажимного рычага 170, 171 от исходного (нейтрального) вниз, гидравлический переключатель 172, 173 дает команду на отклонение механизма «П»-образной рамы 40, 41 от первоначального положения, Фиг. 12, на угол (-β), Фиг. 14. При этом во время перемещения механизма «П»-образной рамы 40, 41 вокруг оси 59, 62 происходит обкатывание зубчатого колеса 63 зубчатым колесом 48 с одновременным вращением его оси 38, а также одновременно происходит обкатывание зубчатого колеса 66 зубчатым колесом 49 с вращением оси 39. Далее ось 38, - через лонжеронное звено привода крыла 28 - передает свое вращение на ось лонжерона 5, а вращение оси 39, - через лонжеронное звено привода крыла 29 - передается на ось 6. В результате такого одновременного вращения оси лонжерона 5 и 6, Фиг. 14, лонжерон крыла маха и лонжерон крыла взмаха 3 и 4 отклоняют свою «биссектрисную» ось X2-X2, образованную боковым стержнем 22, 23 - вниз на угол атаки (-α), причем, возникшее при этом линейное удлинение и угловое искривление правого лонжеронного звена привода крыла 28, обеспечивает его обычное рабочее функционирование за счет применения в нем верхнего 42 и нижнего 46 карданного механизма и телескопической оси 44, Фиг. 12, а возникшее одновременно при этом линейное удлинение и угловое искривление левого лонжеронного звена привода крыла 29 обеспечивает его обычное рабочее функционирование за счет применения в нем верхнего 43 и нижнего 47 карданного механизма и телескопической оси 45, причем, такое положение лонжеронов крыла маха и лонжеронов крыла взмаха позволяет, - при соответствующей балансировке летательного аппарата и при установлении определенного числа оборотов (n) оси лонжеронов 5 и 6, Фиг. 14 - перейти из режима висения на месте к полету: либо по горизонтальной траектории вперед, либо по траектории со снижением (уменьшение высоты полета). Для полета со смещением (развороте) влево, Фиг. 2а), вид Б-Б и Фиг. 16а), необходимо нажимной рычаг 171, - от исходного (нейтрального) положения, Фиг. 12, - перевести вверх. Фиг. 13, при этом нажимной рычаг 170 остается в исходном (нейтральном) положении, Фиг. 12, но для ускоренного смещения (разворота) влево необходимо нажимной рычаг 171, - от исходного (нейтрального) положения - перевести вверх. Фиг. 13, а нажимной рычаг 170, - от исходного (нейтрального) положения - перевести вниз. Фиг. 14, при этом для осуществления разворота: либо в горизонтальной плоскости, либо по траектории со снижением высоты полета, либо по траектории с набором высоты полета - необходимо для каждой траектории полета вносить свою корректировку в число оборотов (n) оси лонжерона 5 и 6, Фиг. 3б).
Для полета со смещением (развороте) вправо, Фиг. 2а), вид Б-Б и Фиг. 16б), необходимо нажимной рычаг 170, - от исходного (нейтрального) положения, Фиг. 12, - перевести вверх. Фиг. 13, при этом нажимной рычаг 171 остается в исходном (нейтральном) положении, Фиг. 12, а для ускоренного смещения (разворота) вправо необходимо нажимной рычаг 170, - от исходного (нейтрального) положения - перевести вверх. Фиг. 13, а нажимной рычаг 171, - от исходного (нейтрального) положения - перевести вниз. Фиг. 14, при этом для осуществления разворота: либо в горизонтальной плоскости, либо по траектории со снижением высоты полета, либо по траектории с набором высоты полета - необходимо для каждой траектории полета вносить свою корректировку в число оборотов (n) оси лонжерона 5 и 6, Фиг. 3б).
При движении крыла (Фиг. 4), по круговой траектории, - от середины периода взмаха (позиция Б) - к позиции (А) поверхность полотна парусины приходит в ускоренное движение за счет 2-х (двух) окружных скоростей: первая окружная скорость (Vокр.1) формируется за счет движения лонжеронов крыла; вторая скорость (Vокр.2) формируется за счет перемещения «биссектрисной» части крыла (2) из максимальной вогнутости к минимальной (Фиг. 15а), б). Козырек 27 способствует увеличению профильного сопротивления крыла при движении его от позиции Б к позиции А (Фиг. 4, фиг. 15а), б).
Описание работы «пропеллерно-пружинного» режима крыла.
Для перехода от «пропеллерного» режима крыла к «пропеллерно-пружинному» режиму крыла необходимо вертикальный педальный рычаг 152А, Фиг. 10а) перевести по ходу (вправо) до положения 152Б, (среднее положение) Фиг. 10б), который переместит комбинированную тягу 156А, Фиг. 10а) до положения 156Б, Фиг. 10б), вправо; при этом, вертикальный стержень 160А «Г»-образного рычага 102А, Фиг. 10а), окажется на противоположной (внутренней) стороне кольца 159Б, Фиг. 10б), а трехпозиционный рычаг переводится из положения 149А, Фиг 10а), в положение 149Б, (среднее положение) Фиг. 10б). В результате этого гидравлический переключатель 150 дает команду гидроцилиндру 147 переместить его шток из положения 146А, Фиг. 10а), в положение 146Б, Фиг. 10б). Затем, посредством тяги 148Б, ведущего рычага 110Б, ведомого рычага 111Б, 112Б и промежуточной тяги 144Б, 145Б, прямоугольная рамка переместится: правая - из положения 134А, Фиг. 10а), в положение 134Б, Фиг. 10б), а левая - из положения 135А, Фиг. 10а), в положение 135Б, Фиг. 10б), т.е. она оказалась в непосредственном контакте с пружинным ограничителем 130 и 131, в результате чего, движение шейки коленчатого вала 117 вокруг его оси 105, Фиг. 10б), преобразуется в возвратно-поступательное движение подвижного стержня 118 и 119 и за счет упора 120 и 121, - расположенного на нем - демпфирующая пружина 128 и 129 звена 113 и 114, начнет поочередно сжиматься и разжиматься, делая вращение оси 105, - в определенных положениях шейки коленчатого вала 117 - поочередно: то с ускорением, то с замедлением, т.е. при занятии шейкой коленчатого вала 117 положения, указанного на Фиг. 18 (перпендикулярное звену 113 и 114), пружина 128 и 129 находится в разжатом положении, а крыло маха (1) и крыло взмаха (2) находятся в положении указанном на Фиг. 22 (в середине периода маха «А» и в середине периода взмаха «Б» на оси Х-Х). При занятии шейкой коленчатого вала 117 положения, указанного на Фиг. 19 (вдоль звена 113), пружина 129, - за счет перемещения звена 113 и 114 вправо - сжимается, а крыло маха (1) и крыло взмаха (2) продолжает свое круговое движение от быстрого к замедленному, Фиг. 23, до занятия им положения вдоль линии соприкосновения периода маха и периода взмаха (Оси Y-Y). При занятии шейкой коленчатого вала 117 положения, указанного на Фиг. 20 (перпендикулярное звену 113 и 114), пружина 128 и 129 находится в разжатом положении, где крыло маха (1) занимает прежнее положение крыла взмаха (2), а крыло взмаха (2) занимает прежнее положение крыла маха (1), причем, в период разжатия пружины 129 звено 113 и 114, - с кратковременным ускорением - возвращается в исходное положение (нейтральное), а это значит, что крыло маха (1) и крыло взмаха (2), - с кратковременным ускорением, при движении его по круговой траектории, занимает положение, указанное на Фиг. 24, т.е. крыло (2) имеет дополнительное ускорение в начале периода маха и взмаха. При занятии шейкой коленчатого вала 117 положения, указанного на Фиг. 21 (вдоль звена 114), пружина 128, - за счет перемещения звена 113 и 114 влево - сжимается, а крыло маха (1) и крыло взмаха (2) продолжает свое круговое движение от быстрого к замедленному, Фиг. 25. При занятии шейкой коленчатого вала 117 положения, указанного на Фиг. 18 (перпендикулярное звену 113 и 114), пружина 128 и 129 находится в разжатом положении, где крыло маха (1) возвращается в свое прежнее положение, при этом, в период разжатия пружины 128, звено 113 и 114, - с кратковременным ускорением - возвращается в исходное положение (первоначальное), а это значит, что крыло маха (1) и крыло взмаха (2), - с кратковременным ускорением, при движении его по круговой траектории - занимает положение, указанное на Фиг. 22, причем, для получения кратковременного ускорения с максимальной величиной, необходимо корректировать обороты (n) оси 5 и 6, лонжеронов 3 и 4, Фиг. 2а). С целью уменьшения величины «вредных» инерционных сил, возникающих на подвижном стержне 118, 119, на период его возвратно-поступательного движения, Фиг. 10а), необходимо: (как вариант №2) изменить крепление демпфирующей пружины 128 и 129, т.е. открепить пружину 128 от упора 120, и прикрепить ее противоположным концом (вместе с пружинным ограничителем 130) к прямоугольной рамке 134. Таким же образом необходимо открепить пружину 129 от упора 121, и жестко прикрепить ее противоположным концом (вместе с пружинным ограничителем 131) к прямоугольной рамке 135.
Описание работы механизмов «беспропеллерно-пружинного» режима крыла (режима планирования).
Для перехода от «пропеллерно-пружинного» режима крыла к «беспропеллерно-пружинному» режиму крыла необходимо: вертикальный педальный рычаг 152Б, Фиг. 10б), перевести по ходу (вправо) до положения 152В (крайнее положение)таким образом, положение кольца от положения 159Б, Фиг. 10б) изменится до положения 159В, Фиг. 11, при таком перемещении комбинированной тяги от положения 156Б, Фиг. 10б), до положения 156В, Фиг. 11, кольцо 159В тоже переместится по ходу (вправо), а вместе с ним переместится (вправо) и вертикальный стержень 160В «Г»-образного рычага 102А, Фиг. 10а), - из положения 160А в положение 160В, Фиг. 11. В результате такого перемещения его (стержня 160В), муфта 99 разъединит «жесткую» связь между ведущей осью 100 и промежуточной осью звена главного привода 97 и одновременно с этим, трехпозиционный рычаг из положения 149Б, Фиг. 10б), перейдет в положение 149В, Фиг. 11, и как следствие, гидравлический переключатель 150 даст команду гидроцилиндру 147 еще дальше выдвинуть свой шток - из положения 146Б, Фиг. 10б, в положение 146В, Фиг. 11, в результате которого, посредством тяги 148В; ведущего рычага 110В; ведомого рычага 111В, 112В и промежуточной тяги 144В, 145В прямоугольная рамка переместится: правая - из положения 134Б, Фиг. 10б), в положение 134В, Фиг. 11; левая - из положения 135Б Фиг. 10б), в положение 135В, Фиг. 11. В результате чего одновременно произойдет плавное и полное сжатие демпфирующей пружины 128, 129 в сторону упора 120 и 121, соответственно. При этом, шейка коленчатого вала 117 фиксируется в одном из положений, показанном на Фиг. 18 или Фиг. 20, а вместе с ней фиксируется крыло маха (1) и крыло взмаха (2) в положении, показанном на Фиг. 22 или Фиг. 24, т.е. крыло маха (1) и крыло взмаха (2) занимает фиксированное положение для «беспропеллерно-пружинного» режима планирования, Фиг. 2а).
Описание работы двух режимов крыла при переходе из «пропеллерного» режима крыла в «беспропеллерно-пружинной» режим крыла.
Допускается вариант перехода - сразу из «пропеллерного» режима крыла в «беспропеллерно-пружинный» путем перевода вертикального педального рычага из положения 152А, Фиг. 10а) в положение 152В, Фиг. 11, где плавность перехода из одного режима в другой обеспечивается демпфирующей пружиной 128 и 129, при этом, вначале срабатывает механизм муфты 99 на разъединение осей 100 и 97, а только затем произойдет полное сжатие демпфирующей пружины 128В и 129В рамкой 134В и 135В.
Для перехода из «беспропеллерно-пружинного» режима крыла либо, из «пропеллерного-пружинного» режима крыла в «пропеллерный» необходимо при помощи пружины растяжении 161, Фиг. 11, вернуть вертикальный педальный рычаг 152 из положения 152В или 152Б в положение 152А, Фиг. 10а), а вместе с ним все ключевые звенья и тяги, обозначенные цифрами с буквой «Б» или «В», Фиг. 10б), фиг. 11, вернуться в исходное положение, обозначенного цифрами с буквой «А», Фиг. 10а).
Испытание модели, проведенные с крылом маха (1) и крылом взмаха (2), Фиг. 2а), в уменьшенном масштабе, без применения механизмов управления крылом, дали следующие показатели: при максимальном угле «развала» крыла маха (1), равным 56°±2° и нахождении его в середине периода маха (А), Фиг. 4, с «биссектрисным радиусом равным 0,535 м и, полученной при этом максимальной проекционной площадью [между лонжеронами крыла маха (1)], равной 0,236 м2 и, полученным при этом профильным сопротивлением его, равным (Qкр.1), а так же при минимальном угле «развала» крыла взмаха (2), равным 0°±2° и нахождении его в середине периода взмаха (Б), Фиг. 4 с «биссектрисным» радиусом, равным 0,640 м и, полученной при этом минимальной проекционной площади [между лонжеронами крыла взмаха (2)], равной 0,034 м2 и, полученным при этом профильным сопротивлением его, равным (Qкр.2), где величина результирующего сопротивления (Qрез.=Qкр.1-Qкр.2) составила: на оборотах оси лонжерона 5 и 6, Фиг. 2а), равным 0,95 об/сек с результатом в 0,7 кгс; на оборотах оси лонжерона 5 и 6, Фиг. 2а), равным 1,43 об/сек, с результатом в 2,2 кгс; при этом отношение ширины «козырька» к биссектрисной длине бокового стержня лонжерона (24, 25), Фиг. 2а) крыла взмаха (2)на оси Х-Х, составило как 1/10, причем, в крыле маха (1) и в крыле взмаха (2), его несущая часть профильного сопротивления была представлена не в виде парусиновой ткани, а в виде герметичной ткани лавсанового типа, т.е. применялась герметическая ткань от зонтика для дождя по своим свойствам близкая к свойствам парусины.
Перечень элементов крыла и механизмов управления.
1 - крыло маха
2 - крыло взмаха
3 - фигурный лонжерон (правый) крыла маха и взмаха 0
4 - фигурный лонжерон (левый) крыла маха и взмаха
5 - ось правого лонжерона
6 - ось левого лонжерона
7 - правая удлиненная втулка
8 - левая удлиненная втулка
9 - правая платформа
10 - левая платформа
11 - правая боковая рама
12 - левая боковая рама
13 - горизонтально-удлиненный стержень (верхний)
14 - горизонтально-удлиненный стержень (нижний)
15 - горизонтально-укороченный стержень (верхний)
16 - горизонтально-укороченный стержень (нижний)
17 - общий каркас крыла
18 - центральный стержень (3)-фигурного лонжерона (правого)
19 - центральный стержень (4)-фигурного лонжерона (левого)
20 - зубчатое колесо оси (5)
21 - зубчатое колесо оси (6)
22 - боковой стержень лонжерона - маха (3)
23 - боковой стержень лонжерона - маха (4)
24 - боковой стержень лонжерона - взмаха (3)
25 - боковой стержень лонжерона - взмаха (4)
26 - «козырек» крыла маха (1)
27 - «козырек» крыла взмаха (2)
28 - лонжеронное звено (правое)
29 - лонжеронное звено (левое)
30 - ось верхняя (лонжерон звена 28)
31 - ось верхняя (лонжерон звена 29)
32 - зубчатое колесо (оси 30)
33 - зубчатое колесо (оси 31)
34 - втулка (оси 30)
35 - втулка (оси 31)
36 - кронштейн (втулки 34)
37 - кронштейн (втулки 35)
38 - ось «П»-образной рамы (правой)
39 - ось «П»-образной рамы (левой)
40 - «П»-образная рама (правая)
41 - «П»-образная рама (левая)
42 - верхний карданный механизм (правого звена 28)
43 - верхний карданный механизм (левого звена 29)
44 - телескопическая ось (правого звена 28)
45 - телескопическая ось (правого звена 29)
46 - нижний карданный механизм (правого звена 28)
47 - нижний карданный механизм (левого звена 29)
48 - обкатное зубчатое колесо (оси 38)
49 - обкатное зубчатое колесо (оси 39)
50 - верхняя втулка (оси 38)
51 - верхняя втулка (оси 39)
52 - нижняя втулка (оси 38)
53 - нижняя втулка (оси 39)
54 - верхний горизонтальный стержень-шарнир («П» образной рамы - 40)
55 - верхний горизонтальный стержень-шарнир («П» образной рамы - 41)
56 - нижний горизонтальный стержень-шарнир («П» образной рамы - 40)
57 - нижний горизонтальный стержень-шарнир («П» образной рамы - 41)
58 - рама «реверса»
59 - вертикально расположенная промежуточная ось (правая) «реверса»
60 - главная промежуточная ось механизма «реверса»
61 - вертикально расположенная промежуточная первая левая) ось «реверса»
62 - вертикально расположенная промежуточная втора левая) ось «реверса»
63 - зубчатое колесо (оси 59)
64 - зубчатое колесо - верхнее - (оси 60)
65 - зубчатое колесо (оси 61)
66 - зубчатое колесо (оси 62)
67, 68, 69 70 - втулки верхнего горизонтального стержня рамы механизма «реверса»
71 - верхний горизонтальный стержень рамы механизма «реверса»
72, 73, 74, 75 - втулки нижнего горизонтального стержня рамы механизма «реверса»
76 - нижний горизонтальный стержень рамы «реверса» (58)
77 - нижняя платформа каркаса крыла (правая)
78 - нижняя платформа каркаса крыла (левая)
79 - правый вертикальный стержень платформы (77)
80 - левый вертикальный стержень платформы (78)
81 - «С» образный вертикальный стержень рамы «реверса» (правый) - (58)
82 - «С» образный вертикальный стержень рамы «реверса» (левый) - (58)
83 - верхняя втулка внешнего верхнего конца правой промежуточной оси (59)
84 - верхняя втулка внешнего конца второй левой промежуточной оси (62)
85 - нижняя втулка внешнего нижнего конца промежуточной правой оси (59)
86 - нижняя втулка внешнего нижнего конца второй левой промежуточной оси (62)
87 - внешний вертикальный стержень П»-образной рамы (40)
88 - внешний вертикальный стержень П»-образной рамы (41)
89 - горизонтальный рычаг (стержня 87) (рычаг рамы)
90 - горизонтальный рычаг (стержня 88) (рычаг рамы)
91 - зубчатое колесо нижнее (ведомое) оси 60
92 - зубчатое колесо звена главного привода (93)
93 - звено главного привода
94 - ось зубчатого колеса (92)
95 - втулка оси (94)
96 - демпфирующий механизм (звена 93)
97 - промежуточная ось звена главного привода (93)
98 - втулка промежуточной оси (97)
99 - механизм муфты звена главного привода (93)
100 - ведущая ось звена главного привода (93)
101 - втулка оси (100) звена главного привода (93)
102 - рычаг «Г» образной формы механизма муфты (99)
103 - вертикальное звено коленчатого вала (104)
104 - коленчатый вал
105 - верхняя укороченная ось коленчатого вала (104), жестко соединенная с нижним концом главной промежуточной оси (60) «реверса»
106 - нижняя удлиненная ось коленчатого вала (104)
107 - втулка укороченной оси (105)
108 - втулка удлиненной оси (106)
109 - свободно вращающаяся втулка на оси (106)
110 - верхний (ведущий) рычаг втулки (109)
111 - ведомый нижний рычаг втулки (109)
112 - ведомый нижний рычаг втулки (109)
113 - правое звено горизонтального трехрежимного механизма
114 - левое звено горизонтального трехрежимного механизма
115 - правый шатун коленчатого вала (104)
116 - левый шатун коленчатого вала (104)
117 - шейка коленчатого вала (104)
118 - подвижный стержень правого звена (113)
119 - подвижной стержень левого звена (114)
120 - упор подвижного стержня (118)
121 - упор подвижного стержня (119)
122 - внутренняя втулка подвижного стержня (118)
123 - внешняя втулка подвижного стержня (118)
124 - внутренняя втулка подвижного стержня (119)
125 - внешняя втулка подвижного стержня (119)
126 - втулочный ограничитель втулки (122)
127 - втулочный ограничитель втулки (124)
128 - демпфирующая пружина подвижного стержня (118)
129 - демпфирующая пружина подвижного стержня (119)
130 - пружинный ограничитель пружины (128)
131 - пружинный ограничитель пружины (129)
132 - режимное звено подвижного стержня (118)
133 - режимное звено подвижного стержня (119)
134 - прямоугольная рамка режимного звена (132)
135 - прямоугольная рамка режимного звена (133)
136 - внешний вертикальный стержень режимного звена (132)
137 - внешний вертикальный стержень режимного звена (133)
138 - горизонтальный стержень режимного звена (132)
139 - горизонтальный стержень режимного звена (133)
140 - втулка горизонтального стержня (138)
141 - втулка горизонтального стержня (139)
142 - ось втулки (140)
143 - ось втулки (141)
144 - промежуточная тяга ведомого нижнего рычага (111)
145 - промежуточная тяга ведомого нижнего рычага (112)
146 - шток (выдвижной) (147)
147 - гидроцилиндр (исполнительный механизм)
148 - тяга штока (146)
149 - трехпозиционный рычаг (150)
150 - гидравлический переключатель золотникового типа режимного звена подвижного стержня (132, 133)
151 - подводящий (питающий) трубопровод
152 - вертикальный педальный рычаг горизонтального трехрежимного механизма (153)
153 - горизонтальный трехрежимный механизм вертикального педального рычага (152)
154 - промежуточное звено, расположенное между трехпозиционным рычагом (149) и педальным (вертикальным) рычагом (152)
155 - внутреннее звено промежуточного звена (154)
156 - комбинированная тяга промежуточного звена (154)
157 - втулка комбинированной тяги (156)
158 - внешнее звено промежуточного звена (154)
159 - кольцо удлиненной формы комбинированной тяги (156)
160 - вертикальный стержень «Г»-образного рычага муфты (102)
161 - пружина растяжения «Г»-образного звена-упора (163)
162 - вертикальный стержень «Г»-образного звена-упора (163)
163 - «Г»-образно звено-упора для вертикального педального рычага (152)
164 - шток гидроцилиндра (166)
165 - шток гидроцилиндра (167)
166 - правый гидроцилиндр штока (164)
167 - левый гидроцилиндр штока (165)
168 - звено штока гидроцилиндра (164)
169 - звено штока гидроцилиндра (165)
170 - трехпозиционный рычаг переключателя золотникового типа (172) - нажимной рычаг
171 - трехпозиционный рычаг переключателя золотникового типа (173) - нажимной рычаг
172 - правый гидравлический переключатель золотникового типа
173 - левый гидравлический переключатель золотникового типа
174 - трубопровод, подающий гидравлическую жидкость под давлением (P) от общего источника давления для гидроцилиндра (166)
175 - трубопровод, подающий гидравлическую жидкость под давлением (P) от общего источника давления для гидроцилиндра (167)
176 - «Г»-образная траектория окружности, которую описывает шейка коленчатого вала (117) (за один полный оборот 0°-360°) вращения его оси (106).
| название | год | авторы | номер документа |
|---|---|---|---|
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| СИЛЬФОННЫЙ ДВИГАТЕЛЬ КОСТИКОВА | 1995 |
|
RU2098674C1 |
| Модель птицелета | 1986 |
|
SU1830353A1 |
| УСТРОЙСТВО КОСТИКОВА Л.Я. ДЛЯ РАЗРУШЕНИЯ СНЕЖНО-ЛЕДЯНЫХ ОБРАЗОВАНИЙ НА ДОРОЖНЫХ ПОКРЫТИЯХ | 1997 |
|
RU2128269C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| МАХОЛЕТ | 2008 |
|
RU2369526C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВАЛОВА ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ЭЛАСТИЧНОЙ ЛОПАСТИ НЕСУЩЕГО ВИНТА КОМБИНИРОВАННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2043948C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2128131C1 |
| МАХОЛЕТ | 1995 |
|
RU2081033C1 |







Изобретение относится к конструкциям летательных аппаратов с машущими крыльями. Крыло состоит из крыла маха и крыла взмаха и содержит полотно парусины и два фигурных зеркально расположенных относительно друг друга лонжерона крыла. Ось лонжерона свободно вращается в удлиненной втулке, внешний конец которой жестко прикреплен к платформе прямоугольной рамы. Внешний боковой край платформы жестко прикреплен к вертикальному стержню боковой рамы, а к верхнему и нижнему поперечному стержню боковой рамы жестко прикреплены горизонтальные стержни так, чтобы при виде сверху образовалась геометрическая фигура в виде перевернутой трапеции с углом наклона ее боковой стороны к центру фигуры на угол, равный 14±0,5°. Лонжерон содержит центральный стержень, к которому жестко прикреплена ось лонжерона. К внешнему концу оси жестко прикреплено зубчатое колесо лонжерона. Боковой стержень лонжерона своим внутренним концом жестко закреплен с внешним концом центрального стержня лонжерона. Период маха крыла определен сектором от 0° до 180°, а период взмаха крыла определен сектором окружности от 180° до 360°. Достигается снижение силы инерции, возникающей при движении крыла по круговой траектории, что способствует созданию крыла маха большей площади. 25 ил.
Управляемое крыло пропеллерного типа, имеющее внешний каркас, двигатель и механизм управления, отличающееся тем, что имеет одну пару крыльев, которая состоит из двух фигурных, зеркально расположенных относительно друг друга, лонжеронов и полотна парусины, сам лонжерон содержит центральный стержень, в котором, перпендикулярно его поверхности, жестко прикреплена ось лонжерона, причем к внешнему концу ее жестко прикреплено зубчатое колесо лонжерона, и при этом сама ось свободно вращается в удлиненной втулке, внешний конец которой жестко прикреплен к платформе боковой прямоугольной рамы, при этом боковой стержень лонжерона своим внутренним концом жестко закреплен с внешним концом центрального стержня лонжерона с углом наклона от линии его поверхности в сторону оси лонжерона на углы, равные 14±0,5°, при этом внешний боковой край платформы (левый и правый) жестко прикреплены к вертикальному стержню боковой рамы, а к верхнему и нижнему поперечному стержню боковой рамы жестко прикреплен горизонтально-удлиненный, а также горизонтально-укороченный стержни так, чтобы при виде сверху образовалась геометрическая фигура в виде перевернутой трапеции с углом наклона ее боковой стороны - к центру фигуры - на угол, равный 14±0,5°, а для образования на внешнем крае поверхности крыла маха и крыла взмаха «козырьков» внешние края боковых стержней отогнуты на углы, равные 60°, период маха крыла определен сектором окружности от 0° до π радиана, а период взмаха крыла определен сектором окружности от π до 2π радиана.
| Устройство для предотвращения обратных перетоков воды между соленым и чистым отсеками в паровых котлах | 1957 |
|
SU115971A1 |
| МАХОЛЕТ | 2009 |
|
RU2412083C2 |
| WO 2011142864 A2, 17.11.2011 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |

