Область техники, к которой относится изобретение.
Изобретение относится к способу измерения геометрии профиля сферически изогнутых, в частности цилиндрических, тел согласно п.1 формулы изобретения, а также устройству для осуществления способа согласно п.3 формулы изобретения.
Изобретение относится, в частности, к оптическому измерению профиля, которое проводится бесконтактно методом светового сечения как одним и без того известных методов двухмерной триангуляции.
При этом в условиях происходящего относительного движения датчика и измеряемого объекта путем объединения последовательно снимаемых двухмерных «профильных сечений» может строиться трехмерный «комплексный профиль» измеряемого объекта, например такого, как труба.
Рассматриваемое в рамках настоящего изобретения измерение профиля базируется в своей одномерной форме на известной точечной триангуляции, при которой лазер и построчный определяющий местоположение детектор образуют сенсор триангуляции. Ось лазерного луча и оптическая ось детектора образуют плоскость, называемую далее «нормальной плоскостью», и расположены относительно друг друга под углом триангуляции. Обычно удаление измеряемого объекта от сенсора в направлении лазерного луча является измеряемым показателем. Этот способ известен, например, из DE 4037383 А1.
Двухмерное расширение точечной триангуляции является объектом настоящей патентной заявки. В этом, также в принципе известном, методе светового сечения точечный лазерный луч заменяется веером лазерного луча и одномерный строчечный детектор двухмерным плоским детектором.
Уровень техники.
В известном способе расширение происходит соответственно ортогонально и симметрично относительно плоскости, названной выше нормальной плоскостью. Соответствующая область измерения на измеряемом объекте отображается с помощью объектива на детекторе, причем объектив и детектор при этом образуют двухмерно работающую камеру для съемки поверхностей.
Веер лазерного луча при этом генерируется обычным способом размещенной перед выходящим точечным лазерным лучом дифракционной оптикой и таким образом отображает на измеряемом объекте линию, называемую «линией светового сечения».
При применении описанного метода на цилиндрических измеряемых объектах, например, но не обязательно, - на трубах, линия светового сечения обычно проходит ортогонально относительно оси трубы. При аксиальном продольном перемещении труб или соответствующем движении сенсора по мере проведения измерений, как уже было сказано выше, снимается трехмерный профиль геометрии трубы.
При проведении измерения светового сечения описанным образом проявляется характерный, обусловленный геометрией измеряемого объекта недостаток, который точное определение геометрии профиля по частям делает даже невозможным.
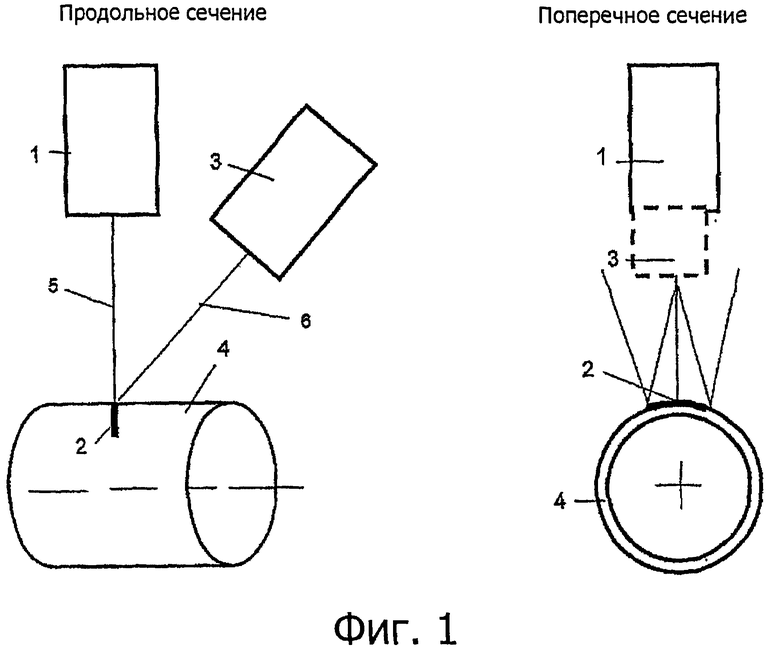
На фиг.1 схематически отражен касающийся этого уровень техники двухмерного измерения цилиндрической трубы с использованием светового сечения. Для измерения используется изображение веерообразно облученной в виде спроецированной лазерной линии 2 лазером 1 поверхности измеряемого объекта 4 на исполненном в виде камеры 3 детекторе.
Левая часть чертежа схематически показывает вид в продольного сечения, а правая часть чертежа поперечного сечения относительно продольной оси измеряемого объекта. Световые сечения лазера 1 и камеры 2 размещены при этом в нормальной плоскости по линии продольной оси измеряемого объекта, причем угол между осью веера 5 лазерного луча лазера 1 и оптической осью 6 камеры 3 в продольном сечении является углом триангуляции.
Недостатком при этом расположении является то, что при измерении в камеру 3 для оценки попадает только незначительная часть отраженной энергии лазерного луча. В частности, при проведении динамического измерения особое значение имеет энергия в расчете на один интервал времени экспозиции, что, в частности, при быстром относительном движении между камерой 3 и измерительным объектом 4 и в связи с этим неизбежно коротком времени экспозиции является критическим и может сделать трехмерное измерение профиля даже невозможным.
Этот недостаток измерения известным способом при применении на цилиндрических геометриях усиливается угловыми условиями по причине веерообразного расширения лазерного луча 2 и поэтому проявляется особенно сильно в краевых областях поля измерений, в частности, там, где в результате искривления поверхности камерой 3 улавливается еще меньшая часть отраженной энергии лазерного луча.
Недостатком является уменьшение интенсивности в краевых областях отображенной линии светового сечения и для отношения сигнал/шум при оценке сигнала и, тем самым, в итоге для точности измерения сигнала.
Повышение выходной мощности лазера, хотя и приводит к улучшению отношения сигнал/шум, связано с недостатком повышения затрат на лазер и защиту от лазера.
Принципиально также возможное увеличение времени экспозиции камеры исключается само собой при быстром относительном движении между сенсором и измеряемым объектом из-за увеличивающейся нерезкости за счет движения объекта.
Принципиально при наличии типичной характеристики рассеивания поверхности измеряемого объекта был бы также возможен более крутой угол зрения камеры (т.е. более крутой угол триангуляции), однако он уменьшил бы, в частности, разрешающую способность.
За счет трех выше названных мероприятий проблема неравномерного распределения интенсивности, однако, не была бы решена; при достаточной краевой интенсивности была бы даже опасность расплывания изображения в центральной области.
Раскрытие изобретения.
В основе настоящего изобретения поставлена задача создать легко реализуемый способ измерения способом двухмерного светового сечения геометрии профиля измеряемого объекта для сферических, в частности цилиндрических, тел, с помощью которого преодолевались бы отмеченные недостатки. Другая задача состоит в том, чтобы предложить соответствующее устройство.
Эта задача решается в изобретении отличительными признаками п.1 формулы изобретения. Предпочтительные варианты являются объектами зависимых пунктов.
Согласно изобретению для измерения геометрии профиля лазер из нормальной плоскости поворачивается вокруг оси цилиндра, причем угол к нормальной плоскости выбирается таким, чтобы оптическая ось камеры для съемки поверхностей относительно поверхности цилиндра находилась в области углов скольжения отраженных лучей.
На основе изобретения путем своеобразного пространственного расположения съемочной камеры и веерного лазерного луча с учетом характеристической геометрии измеряемого объекта легко реализуемым путем преодолеваются недостатки известных методов.
Предложенная инновация описывается здесь в качестве примера для измерительного объекта с цилиндрической геометрией, правда, ее можно переносить соответствующим образом на другие сферические геометрии, например профили боковой поверхности.
В то время как в известных осуществлениях метода светового сечения лазер и камера расположены в получившей выше определение нормальной плоскости по линии оси цилиндра, в предложенной инновации лазер специально поворачивается из этой плоскости вокруг оси цилиндра, поэтому лазер освещает поверхность под углом.
Предпочтительно при этом, если лазер и камера расположены так, что угол съемки относительно оси цилиндра находится в области углов скольжения для расположения оси веера лазерного луча и оптической оси съемочной камеры.
Угол скольжения при этом вообще обозначает угол, при котором матовые не идеально отражающие поверхности при определенном угле проявляют повышенное отражение света, т.е. «блестят». В отличие от известной измерительной техники в данном случае этот эффект используется для того, чтобы путем специального поворачивания лазера из нормальной плоскости усилить отражение лазерных лучей в камеру и из критических краевых областей измеряемого объекта.
Осуществление изобретения.
При поле измерений, симметричном относительно нормальной плоскости, как типичном случае применения предпочтительно применяются два симметрично расположенных лазера (фигура 2).
При одинаковой длине линии светового сечения на боковой поверхности цилиндра получают на основе предложенной инновационной компоновки согласно изображению поперечного сечения на фиг.2 увеличенную область регистрации, т.е. область измерений профиля. Лазер 1, 1' согласно изобретению из нормальной плоскости поворачивается вокруг оси цилиндра, причем угол триангуляции (проецируемый на нормальную плоскость) и тем самым также разрешающая способность по расстоянию при измерении профиля остаются прежними.
При сложении сплошной линии светового сечения из двух частей спроецированной на поверхности измеряемого объекта 4 лазерной линии 2' обе части располагаются по отношению друг к другу прямолинейно, причем отраженные от поверхности лучи воспринимаются расположенной между лазерами 1, 1' камерой 3 и передаются не изображенному на чертеже устройству обработки данных.
Компоновка с двумя лазерами с обеих сторон нормальной плоскости, в которой находится камера, оказывается также предпочтительной при распространении на многоканальное устройство, которым, например, можно снимать всю боковую поверхность цилиндра. Для использования необходимо одинаковое число камер и вееров лазерного луча. Необходимое количество каналов определяется в каждом конкретном случае, исходя из взаимодействия отражательной способности боковой поверхности цилиндра, мощности лазера и (необходимого) времени экспозиции.
Изобретение относится к методу измерения геометрии профиля цилиндрических тел в качестве измеряемых объектов с использованием метода двухмерного светового сечения, при котором с использованием, по меньшей мере, одного лазера проецируется веерообразная лазерная линия в качестве линии светового сечения на поверхность тела и отраженные от поверхности тела лучи воспринимаются, по меньшей мере, одной камерой для съемки поверхностей, причем лазер и камера расположены под углом триангуляции в нормальной плоскости по линии оси цилиндра. Согласно методу для измерения геометрии профиля лазер поворачивается вокруг оси цилиндра из нормальной плоскости, причем угол к нормальной плоскости выбирается таким, чтобы оптическая ось камеры для съемки поверхностей, направленная на поверхность цилиндра, находилась в области скользящих углов отраженных лучей. Технический результат - усиление отражения лазерных лучей в камеру и из критических краевых областей измеряемого объекта. 2 н. и 4 з.п. ф-лы, 2 ил.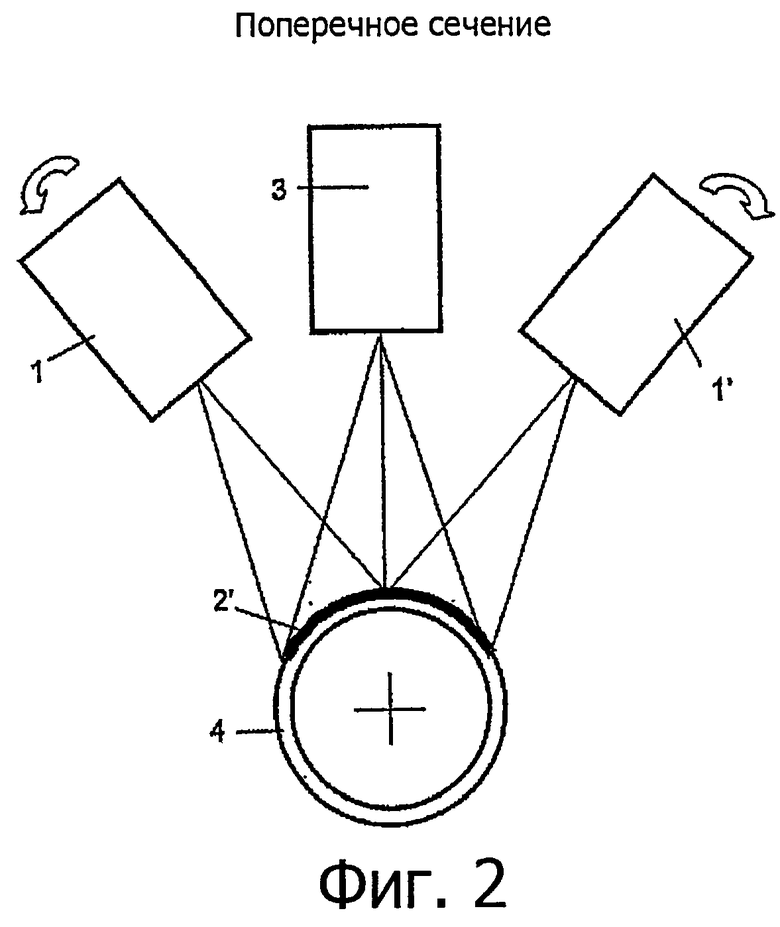
1. Способ измерения геометрии профилей сферически изогнутых, в частности цилиндрических, тел в качестве измеряемых объектов (4) с использованием двухмерного метода светового сечения, при котором в качестве линии светового сечения на поверхности тела, по меньшей мере, одним лазером (1, 1') отображают веерообразную лазерную линию (2, 2') и отраженные от поверхности тела лучи воспринимают, по меньшей мере, одной камерой (3) для съемки поверхностей, причем лазер (1, 1') и камера (3) расположены под углом триангуляции в нормальной плоскости по линии оси цилиндра и измеренные величины передают затем устройству для обработки данных для отображения геометрии профиля, отличающийся тем, что для измерения геометрии профиля лазер (1, 1') из нормальной плоскости поворачивают вокруг оси цилиндра из нормальной плоскости, причем угол к нормальной плоскости выбирают таким, чтобы оптическая ось (6) камеры для съемки поверхностей, направленная на поверхность цилиндра, находилась в области углов скольжения отраженных лучей.
2. Способ по п.1, отличающийся тем, что измерение геометрии профиля измеряемого объекта (4) происходит с использованием нескольких распределенных над боковой поверхностью измеряемого объекта лазеров (1, 1'), веерообразные лазерные линии (2, 2') которых находятся на одной линии и частично перекрывают друг друга, а отраженные от поверхности измеряемого объекта лазерные лучи детектируют расположенными в пространствах между лазерами камерами (3).
3. Способ по п.2, отличающийся тем, что при измерении боковой поверхности измеряемого объекта (4) используют одинаковое число лазеров (1, 1') и камер (3).
4. Устройство для измерения геометрии профиля сферически изогнутых тел, в частности цилиндрических тел, по любому из пп.1-3, состоящее, по меньшей мере, из одного проецирующего на измеряемый объект (4) веерообразную лазерную линию (2) лазера (1, 1') и, по меньшей мере, одной расположенной к нему под углом триангуляции камеры (3) для съемки поверхностей, детектирующей отраженное от поверхности измеряемого объекта (4) лазерное излучение, причем лазер (1, 1') и камера (3) расположены в нормальной плоскости по линии оси цилиндра и присоединены к обрабатывающему устройству для отображения геометрии профиля, отличающееся тем, что ось (5) веера лазерного луча выведена из нормальной плоскости и направлена на поверхность измеряемого объекта (4) под отклоняющимся от ортогонального углом, причем оптическая ось (6) камеры (3) для съемки поверхностей, направленная на поверхность цилиндра, находится в области углов скольжения отраженных лазерных лучей.
5. Устройство по п.4, отличающееся тем, что для измерения профиля над боковой поверхностью измеряемого объекта (4) установлено несколько распределенных над боковой поверхностью измеряемого объекта лазеров (1, 1'), веерообразные лазерные линии (2, 2') которых находятся на одной линии и частично перекрывают друг друга, а для детектирования отраженных от поверхности измеряемого объекта (4) лазерных лучей в пространствах между лазерами (1, 1') установлены камеры (3).
6. Устройство по п.5, отличающееся тем, что при измерении боковой поверхности измеряемого объекта (4) установлено одинаковое число лазеров (1, 1') и камер (3).
| US 0006177998 B1, 23.01.2001 | |||
| RU 2005132837 A, 10.02.2006 | |||
| EP 0001519142 B1, 07.11.2007 | |||
| US 0004741621 A1, 03.05.1988 |

