Изобретение относится к области измерительной техники и может быть использовано для визуализации, математического моделирования и распознавания подвижных трехмерных объектов.
Способ реализует принцип подсветки измеряемой поверхности и принцип триангуляции для получения ее точек.
Известны способы, основанные на измерении времени распространения отраженного от измеряемой поверхности светового лазерного импульса (time-of-flight системы, например, http://en.wikipedia.org/wiki/Time-of-flight camera). Из-за необходимости измерять очень короткие интервалы времени, они не обеспечивают удовлетворительной точности на близких расстояниях.
Известен способ, заключающийся в проецировании на измеряемую поверхность структурированного света - контрастных световых полос, покрывающих всю поверхность (например, http://www.foto-business.ru/3D-skaneryi/3D-skaneryi-David/DAVID-Structured-Light-Scanner-SLS-1.html). Он требует нескольких тактов съемки (5-9 за цикл, в зависимости от точности), при этом от такта к такту меняется ширина полос.
Известен также способ (http://automodeling-and-video-mapping.googlecode.com/svn-history/r35/trunk/doc/papers/structured-light/zhang-fast-three-step.pdf), который использует проецирование световых полос, яркость которых меняется в поперечном направлении по синусоидальному закону, при этом требуется всего 3 такта съемки в цикле, причем световые полосы в каждом такте сдвинуты по фазе на 120 градусов.
Последние два способа характеризуются наличием нескольких тактов съемки за цикл, во время которых источник света и регистрирующее устройство должны быть неподвижны относительно измеряемого объекта, в силу чего они также малопригодны для обмера подвижных объектов.
Наиболее близким из известных по своему назначению является способ, реализованный в устройстве "Kinect" фирмой Microsoft (http://masters.donntu.edu.ua/2012/fknt/sobolev/library/article10.htm). Устройство содержит импульсный лазерный источник света и одну регистрирующую камеру. (Вторая камера является дополнительной и служит для отображения текстуры.) Поскольку способ предусматривает всего один такт съемки, он широко используется в компьютерных игровых системах для распознавания подвижных объектов.
Данный способ выбран в качестве прототипа. Особенность способа в том, что в качестве подсветки вместо контрастных полос, меняющейся ширины, или синусоид, сдвинутых по фазе, он использует неизменный световой сигнал случайной формы, который дает уникальную структуру рисунка в окрестности любой точки измеряемой поверхности. Недостатком способа является невысокая точность из-за необходимости для определения координат точки анализа некоторой ее окрестности.
Сущность заявляемого способа заключается в проецировании импульсным источником света на измеряемую поверхность неизменяемого светового сигнала, который представляет собой регулярное множество контрастных параллельных линий, регистрации этого множества за один такт съемки несколькими камерами одновременно, и определении геометрии поверхности вычислительным устройством с помощью простого сравнительного анализа сигнала с этих камер. Количество и расположение используемых камер определяется требуемой точностью и требуемой глубиной измерений.
Новизна предлагаемого способа усматривается в том, что с целью исключения необходимости анализа формы рисунка в окрестности каждой точки вместо рисунка случайной формы, используется световой сигнал, состоящий из регулярного множества линий, а также в том, что вместо одной используется несколько камер, расположенных определенным образом относительно источника света, и регистрирующих этот сигнал одновременно, за один такт, с целью его простого сравнительного анализа вычислительным устройством.
Наличие совокупности данных существенных признаков приводит к достижению технического результата, который выражается в повышении точности и надежности измерений.
Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности изобретения.
Других технических решений аналогичного назначения с подобными существенными признаками не обнаружено.
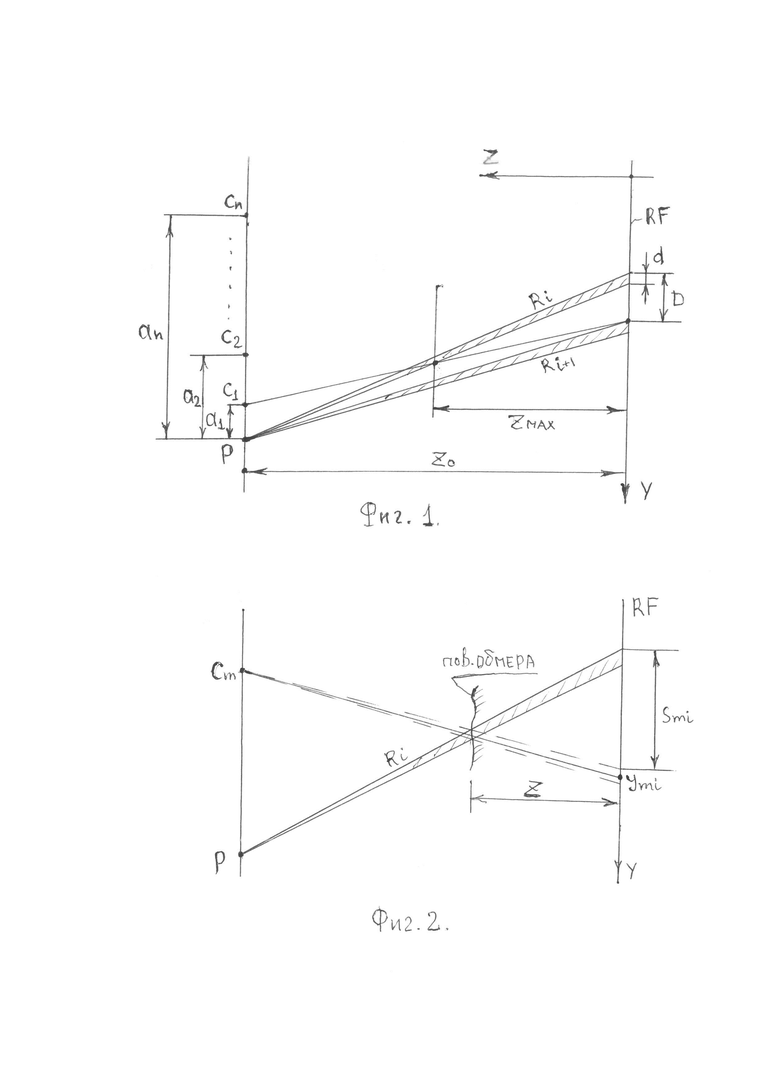
На Фиг. 1 показана схема расположения камер и проецирующего устройства, при реализации предлагаемого способа. Здесь P - импульсное проецирующее устройство, C1, C2, … Cn - регистрирующие камеры, a1, a2, … an - соответствующие расстояния от камер до проектора, RF (reference face) - воображаемая базовая плоскость, она же виртуальный пиксельный экран, общий для всех камер, она же плоскость максимального отдаления z0 измеряемых объектов от проектора, zmax - максимально допустимое смещение поверхности объекта от RF (глубина измерений), Ri - лучи проектора, D - шаг между лучами в проекции на RF, d - толщина линии в проекции на RF.
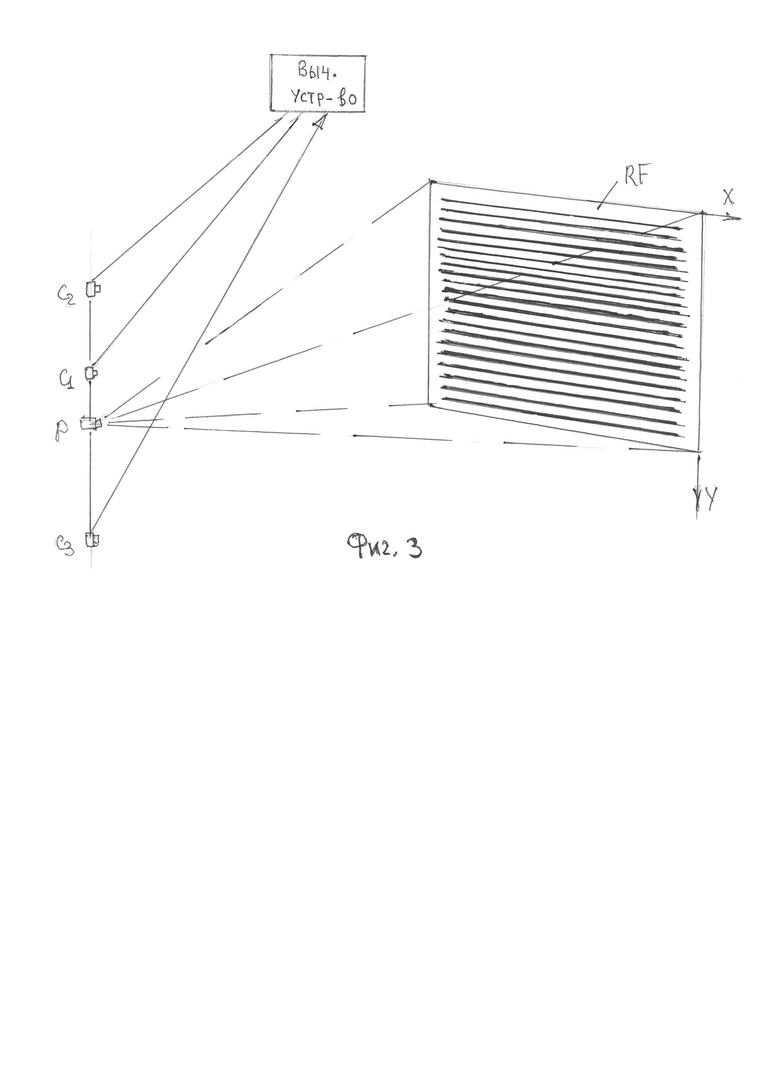
Фиг. 2 поясняет алгоритм триангуляции. Здесь P - проецирующее устройство, Cm - произвольная камера, Ri - произвольный луч проектора, Smi - смещение проекции луча Ri на RF поверхностью обмера для камеры Cm.
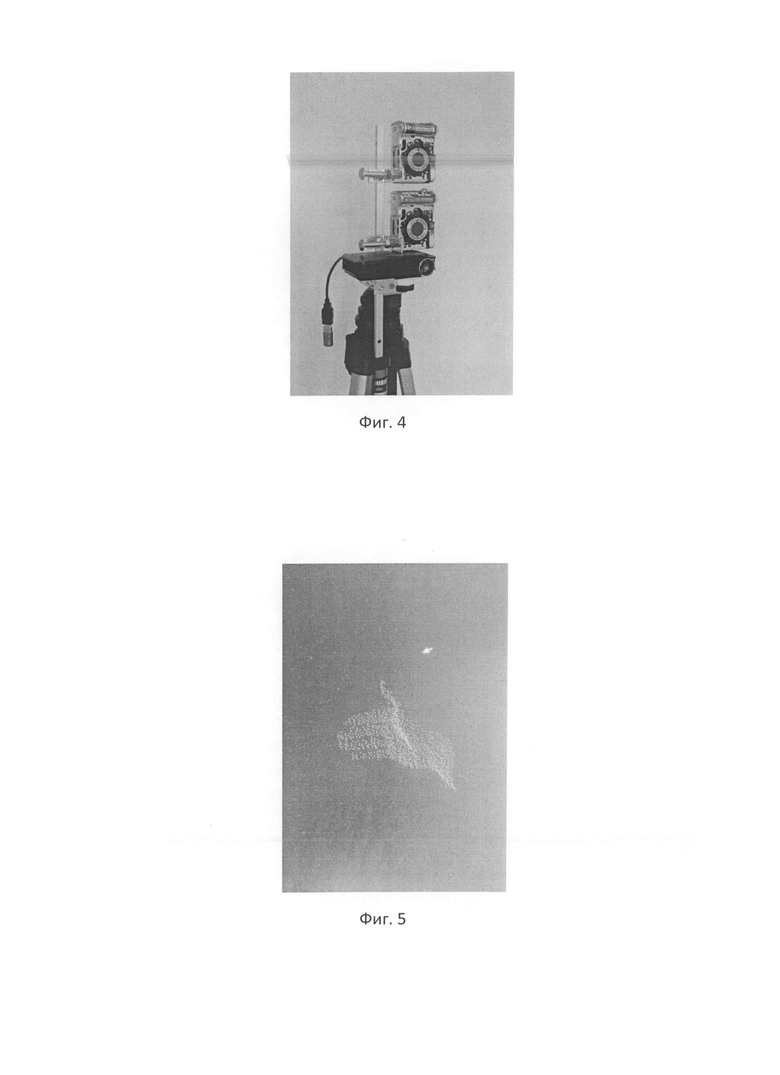
Фиг. 3 иллюстрирует пример реализации предлагаемого способа с использованием трех камер.
На Фиг. 4, 5 показаны экспериментальная установка с двумя камерами, реализующая предлагаемый способ и результат измерения кисти руки.
Активным пикселем Ymi камеры Cm (Фиг. 2) будем называть центральную проекцию (с центром в т. Cm) на RF любой точки на поверхности объекта, освещенной лучом Ri. Луч Ri будем называть порождающим для пикселя Ymj, а сам пиксель Ymj принадлежащим лучу Ri.
Для каждой камеры Cm (Фиг. 2) поверхность объекта смещает изображение луча Ri на RF, при этом координата Z поверхности пропорциональна смещению Smi (принцип триангуляции):

Расположим камеру C1 на таком малом расстоянии a1 от проецирующего устройства, чтобы при любом смещении поверхности объекта меньшем чем Zmax смещение проекции любого луча Ri для этой камеры не превышало величины:

Тогда, исходя из (1), Zmax должно удовлетворять условию (Фиг. 1):

Если, наоборот, задаться значением Zmax, то из (3) получаем предельное значение для a1:

В этом случае смещение проекции любого луча для камеры C1 легко определяется. (Оно лежит в пределах интервалов D1.) Зная смещения, из (1) можно найти значения Z поверхности, однако точность такого вычисления будет очень низкой (в силу малости a1).
Расположим остальные камеры так, чтобы выполнялись условия:

где 
Можно показать, что при выполнении условий (4)-(6) принадлежность активных пикселей для каждой камеры Cm (m=2, … n) легко определяется на основе анализа данных от камер Cm и Cm-1 и, следовательно, определяется геометрия поверхности объекта, причем каждая следующая камера уточняет положение поверхности, сформированной с помощью предыдущей камеры.
С учетом вышеизложенного, способ дистанционного обмера подвижных объектов, при наличии, например, трех камер осуществляют следующим образом (Фиг. 3).
С помощью импульсного проецирующего устройства P создают постоянную подсветку пространства обмера, отображающуюся на RF в виде регулярного массива параллельных контрастных линий толщины d и шагом D. Первую регистрирующую камеру C1 располагают на расстоянии a1 от проектора, оно определяется из (4) при заданном значении Zmax. Чем больше величина Zmax, тем меньше должно быть a1. Две другие камеры располагают так, чтобы выполнялись условия (5). Такт съемки производят одновременно тремя камерами и результат подают на вычислительное устройство, где вначале определяют грубое положение поверхности на основе данных камеры C1. Затем на основе данных о построенной поверхности и данных следующей камеры C2 строят новое, уточненное положение поверхности. И, наконец, на основе данных камеры C3 производят окончательную, корректировку поверхности.
При заданной точности, необходимое количество камер тем меньше, чем больше величина отношения D/d.
Предлагаемый способ может использоваться в различных технологических процессах с целью визуализации, математического моделирования и физического воспроизведения геометрии движущихся трехмерных объектов, а также в компьютерных играх для распознавания движения.
Изобретение относится к области измерительной техники и может быть использовано для визуализации, математического моделирования и распознавания подвижных трехмерных объектов. В способе дистанционного измерения подвижных объектов производят проецировании импульсным источником света на измеряемую поверхность неизменяемого светового сигнала, который представляет собой регулярное множество контрастных параллельных линий, регистрации этого множества за один такт съемки несколькими камерами одновременно, и определении геометрии поверхности вычислительным устройством с помощью простого сравнительного анализа сигнала с этих камер. С помощью импульсного проецирующего устройства P создают неизменяемую подсветку пространства обмера, отображающуюся на базовой плоскости (RF) в виде контрастных параллельных линий толщиной d и шагом D. Первую камеру C1 располагают на расстоянии а1 от проектора, которое определяется из условия, что при максимальном смещении измеряемой поверхности Zmax, отклонения проекций лучей на RF не должны превышать значения D-d. Остальные камеры располагают так, что выполняется условие: am=am-1*Km, где Km - коэффициенты, удовлетворяющие ограничениям: Km<D/d-1. Такт съемки производят одновременно всеми камерами и результат подают на вычислительное устройство, где на основании сравнительного анализа этой информации проводится построение поверхности. Технический результат - повышение точности и надежности измерений. 5 ил.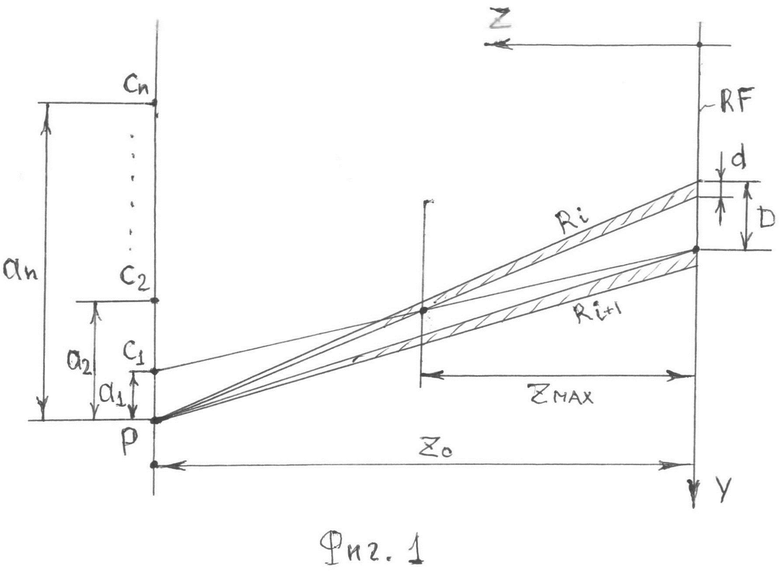
Способ дистанционного измерения подвижных объектов, заключающийся в проецировании с помощью импульсного источника на измеряемый объект неизменяемого во времени светового рисунка, регистрации этого рисунка фото приемным устройством за один такт съемки и передаче его на вычислительное устройство для определения координат измеряемой поверхности, отличающийся тем, что с целью увеличения точности и надежности измерений, световой рисунок представляет собой регулярную сетку параллельных контрастных линий толщиной d и шагом D, фото приемное устройство состоит из нескольких камер, смещенных относительно источника света вдоль фиксированной оси, и производящих синхронную съемку поверхности, причем смещение первой камеры таково, что величина отклонения проекций линий для указанной камеры не превышает величины D-d, и отношение смещения каждой следующей камеры к смещению предыдущей не превышает определенной фиксированной величины, а вычислительное устройство проводит простой сравнительный анализ данных с этих камер, на основании чего определяет координаты поверхности.
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2007 |
|
RU2365876C2 |
| CN 102297658 B, 24.04.2013 | |||
| US 6953151 B2, 11.10.2005 | |||
| US 6509973 B2, 21.01.2003. | |||

