Изобретение относится к способу определения координат беспилотных летательных аппаратов и может быть использовано для определения координат беспилотных летательных аппаратов в автоматическом режиме.
Анализ процесса пеленгации и определения координат беспилотных летательных аппаратов (БЛА) в особых условиях показывает, что использование спутниковой навигационной системы не всегда возможно, поэтому необходимо применять наземные средства определения пространственных координат [1,2].
Применение БЛА позволяет выполнять поиск и обнаружениЕ цели, корректировку огня по ней и контроль результатов поражения цели в едином технологическом цикле. При этом основным недостатком системы является определение координат БЛА в пространстве.
Изобретение предлагает способ автоматизированного определения координат беспилотных летательных аппаратов. Прототипом данного изобретения является изобретение SU 1172374 А1 (МКИ G01S 3/78) от 26.03.84 г. и патент №2349864 от 20.03.09 г. [3,4].
В настоящее время используются различные виды БЛА, при использовании которых возникает проблема определения пространственных координат (использование спутниковой навигационной системы не всегда возможно, это связано с подавлением сигналов средствами радиоэлектронной борьбы и т.д.) [5]. А определение координат с помощью углоизмерительных устройств связано со сложной работой оператора по точному прицеливанию на БЛА и определения его местоположения в пространстве с последующим расчетом его координат вручную.
На этот процесс у оператора уходит много времени и до принятия решения БЛА исчезает из прямой видимости, что делает невозможным получить информацию о координатах БЛА.
Таким образом, существующие аналоги не в состоянии определить точные пространственные координаты БЛА, не затрачивая большое количество времени и ресурсов, что является подтверждением необходимости использования способа автоматизированного определения координат беспилотных летательных аппаратов.
Целью изобретения является автоматизированное определение координат беспилотных летательных аппаратов по вертикальным и горизонтальным углам видеомонитора ЭВМ и по отраженному лазерному излучению, на основе определения дальности (фиг.1).
Изобретение позволяет: 1) в автоматическом режиме определять координаты БЛА для управления и передачи разведывательной информации, а также поражения БЛА противника; 2) сократить время обнаружения БЛА и определения координат; 3) снизить среднюю ошибку определения координат, которая будет сведена к инструментальной ошибке средств измерения; 4) исключить мероприятия по визуальному определению полярных координат БЛА; 5) обеспечить независимость времени обнаружения БЛА, определения координат и обработки информации, что позволяет в автоматизированном режиме поддерживать связь прямую и обратную с БЛА.
Данная цель достигается применением камер кругового обзора с видеомонитором, ориентированным в пространстве, ЭВМ и лазерного дальномера для подсветки БЛА.
Развитие современной элементной базы, в том числе малогабаритных приемников (видеокамер) и малогабаритных мощных источников излучения, позволяет их разместить в качестве перспективных разведывательных систем для обнаружения и распознавания БЛА и определения их пространственных координат [7, 8].
Автоматическое определение координат беспилотных летательных аппаратов в пространстве в зоне ответственности оператора осуществляется с помощью телекамер 1 (фиг.1), размещенных симметрично и направленных в разные стороны, так чтобы вести наблюдение на 360°. Камеры работают посекторно в оптическом диапазоне электромагнитных волн и днем, и ночью. Появление БЛА фиксируется автоматически как помеха 2, возникающая на кадре видеопоследовательности относительно предыдущего. Полученные данные обрабатываются на ЭВМ, где вырабатываются угловые значения местонахождения БЛА по высоте и по горизонту относительно центра углоизмерительного устройства 3. Углоизмерительное устройство по данным ЭВМ и с помощью поворотных механизмов отрабатывает в направлении БЛА излучатель, размещенный на подвижной головке 6. Излучатель испускает лазерный импульс 4, отраженный сигнал 5 с помощью приемника (размещенного на подвижной головке 6 вместе с излучателем) фиксируют время прохождения излучения до БЛА и обратно (излучатель подсвечивает БЛА, а приемник принимает сигнал (измерения дальности от БЛА)).
Измеренная дальность от БЛА поступает на устройство обработки и отображения информации (ЭВМ) о координатах БЛА 7, где происходит автоматизированное определение координат беспилотных летательных аппаратов: XБЛА; YБЛА; ZБЛА.
Измерение углов на местности - это измерение углов между проекциями этих направлений на горизонтальную плоскость при измерении горизонтальных углов или на вертикальную плоскость при измерении вертикальных углов и углов наклона (фиг.2).
Именно эти углы необходимы для вычисления взаимного положения пунктов А и В на земной поверхности в определенной системе координат.
Так, если ∠АОВ - угол на местности между наклонными направлениями ОА и OB, то его горизонтальная проекция ∠A'OB' получится в результате проецирования точек А и В на горизонтальную плоскость (точки А' и В').
Мерой этого угла будет линейный угол β, называемый горизонтальным углом.
Для получения превышений между пунктами на земной поверхности АОВ проецируется на вертикальную плоскость (точки А” и В). Полученный угол ξ называется вертикальным углом.
Угол в вертикальной плоскости, образованный горизонтальной плоскостью, проходящей через точку О, и направлением на какой-либо объект, называется углом наклона. На фиг.2 показаны два угла наклона:
- для направления ОА - ∠γA;
- для направления О В - ∠γB.
На устройстве обработки и отображения информации (ЭВМ) о координатах БЛА и объектов высвечиваются рассчитанные пространственные координаты X, Y, Z (фиг.4).
Описание с формулами определения координат
Дана точка 1 с координатами (X1, Y1, Z1), расстояние между точками 1 и 2 равно D, горизонтальный угол α1 и вертикальный угол α2 с точки 1 на точку 2 (фиг.3).
Необходимо определить координаты точки 2 (Х2, Y2, Z2).
Проекции D на оси координат будут соответствовать ΔХ, ΔY и ΔZ.
Тогда:
X2=X1+ΔХ;
Y2=Y1+ΔY;
Z2=Z1+ΔZ.
Величины ΔХ, ΔY и ΔZ называются приращениями координат. Их значения определяются следующим образом
ΔX=Dcos(α1);
ΔY=Dsin(α1);
ΔZ=Dsin(α2).
Использованная литература
1. Дмитриенко А.Г., Плющ А.А., Блинов А.В., Пархоменко А.В. Воздушная разведка в интересах артиллерии; под общ. ред. А.В.Пархоменко. - Пенза: ПАИИ, 2010. - 255 с.: ил.
2. Ростопчин В.В. Элементарные основы оценки эффективности применения беспилотных авиационных систем для воздушной разведки. http://dpla.ru/otklikrostopchin.htm.
3. Авт.свидетельство SU 1172374 A1 от 26.03.84. Оптическая система наведения подвижного объекта. МКИ G01S 3/78.
4. Пархоменко А.В., Шишков С.В. и др. Нашлемная разведывательная система пассивного дальнеметрирования объектов. - ФИПС. Патент №2349864 от 20.03.09.
5. Пархоменко А.В., Шишков С.В. и др. Насадка к оптико-электронным приборам для визирования объектов при больших углах места. - ФИПС. Патент на полезную модель №83603, 10.06.09.
6. Пархоменко А.В., Шишков С.В. и др.. Устройство разведки объектов методом комбинированного стереоэффекта. - ФИПС. Патент на полезную модель №84539 по заявке на изобретение №2008152592 от 29.12.2008. Опубл. 10.07.2009. Бюл. №19.
7. Пархоменко А.В., Шишков С. В. и др. Устройство разведки объектов методом анаглифов. - ФИПС. Патент на полезную модель №86295 от 27.9.09 по заявке №№2008152594 от 29.12. 2008. Опубл. 27.9.09. Бюл. №24.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПОДАВЛЕНИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ МАЛЫХ БЕСПИЛОТНЫХ ВОЗДУШНЫХ СУДОВ | 2018 |
|
RU2680605C1 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ДВУХ ДИРЕКЦИОННЫХ УГЛОВ И ОДНОГО УГЛА МЕСТА | 2015 |
|
RU2601494C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ОДНОГО ДИРЕКЦИОННОГО УГЛА И ДВУХ УГЛОВ МЕСТА | 2015 |
|
RU2645549C2 |
| Система измерения дальности воздушного объекта | 2022 |
|
RU2800227C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2574224C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТА ЗАСЕЧКОЙ АЗИМУТА С ПЕРВОГО ИЗМЕРИТЕЛЬНОГО ПУНКТА И УГЛА МЕСТА С ДАЛЬНОСТЬЮ - СО ВТОРОГО | 2017 |
|
RU2667115C1 |
| СПОСОБ ГОЛОГРАФИЧЕСКОЙ СКРЫТНОСТИ ОБЪЕКТОВ ОТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2571534C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ЗАСЕЧКОЙ С ДВУХ ИЗМЕРИТЕЛЬНЫХ ПУНКТОВ ПО АЗИМУТУ, УГЛУ МЕСТА И ДАЛЬНОСТИ | 2017 |
|
RU2684733C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТА ЗАСЕЧКОЙ ДАЛЬНОСТИ И УГЛА МЕСТА С ПЕРВОГО ИЗМЕРИТЕЛЬНОГО ПУНКТА И УГЛА МЕСТА - СО ВТОРОГО | 2017 |
|
RU2677586C1 |


Изобретение может быть использовано для определения координат беспилотных летательных аппаратов (БЛА) в автоматическом режиме. Способ автоматизированного определения координат беспилотных летательных аппаратов заключается в том, что по отраженному лазерному излучению от беспилотного летательного аппарата определяются дальность, вертикальные и горизонтальные углы, с помощью которых затем определяется точное местоположение в пространстве БЛА, при этом автоматизированная система обработки информации позволяет определять направление движения БЛА. Достигаемый технический результат - обеспечение передачи разведывательной информации и поражения БЛА противника, сокращение времени обнаружения БЛА и определения координат, повышение точности определения координат БЛА. 3 ил.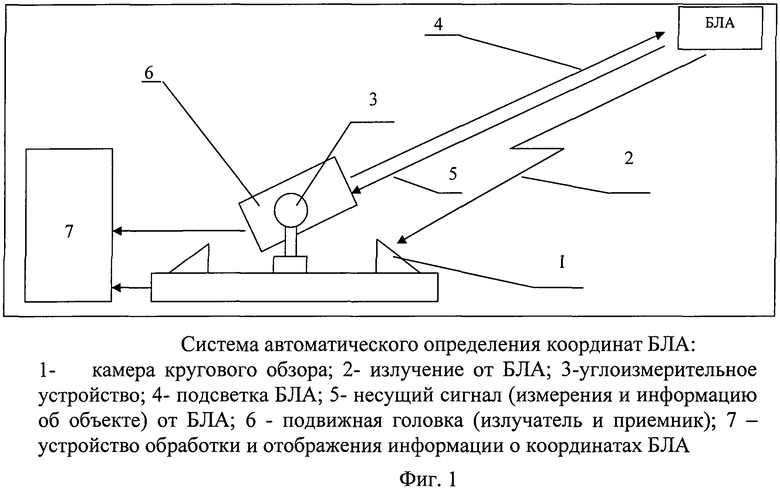
Способ автоматизированного определения координат беспилотных летательных аппаратов с применением камер кругового обзора, видеомонитора, ориентированного в пространстве, ЭВМ и лазерного дальномера для подсветки БЛА, отличающийся тем, что камеры кругового обзора размещены симметрично и направлены в разные стороны, так чтобы вести наблюдение на 360° в оптическом диапазоне электромагнитных волн днем и ночью, и появление БЛА фиксируется автоматически как помеха, возникающая на кадре видеопоследовательности относительно предыдущего, а полученные данные обрабатываются на ЭВМ, где вырабатываются угловые значения местонахождения БЛА по высоте и по горизонту относительно центра углоизмерительного устройства, которое с помощью поворотных механизмов направляет лазерный дальномер на БЛА для измерения дальности до него, затем измеренная дальность от БЛА поступает на устройство обработки и отображения информации (ЭВМ), где происходит автоматизированное определение пространственных координат XБЛА, YБЛА, ZБЛА беспилотных летательных аппаратов.
| Оптическая система наведения подвижного объекта | 1984 |
|
SU1172374A1 |
| СПОСОБ НАБЛЮДЕНИЯ ОБЪЕКТОВ С ДИСТАНЦИОННО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА, ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ОБЗОРНАЯ КАДРОВАЯ СИСТЕМА ДИСТАНЦИОННО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2279999C2 |
| Способ электролитического меднения из цианисто-медных электролитов | 1947 |
|
SU72754A1 |
| СПОСОБ И КОМПЛЕКС СРЕДСТВ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2351000C2 |
| US 6364026 B1, 02.04.2002 | |||
| US 5240207 A, 31.08.1993 | |||

