Изобретение относится к области обнаружения, распознавания и определения координат малогабаритных беспилотных летательных аппаратов (МБЛА) и прицеливания по ним и может быть использовано в военной технике.
Известны различные способы и технические решения для обнаружения летательных аппаратов с использованием способа кругового обзора матричным фотоприемным устройством и устройство для его осуществления (патент РФ №2445644), оптическим локатором кругового обзора (патент РФ №2352957) [1,2]. Недостатками являются сложность конструкции, большие размеры, большая мощность двигателя для вращения камеры (кругового обзора) и соответственно ошибки в снятии результата.
Способы визуально-оптического контроля лазерного сканирования атмосферы и автоматизированного определения координат беспилотных летательных аппаратов (патенты РФ №№2489732, 2523446) [3,4]. Основным недостатком является демаскирующая составляющая данных способов, связанная с использования лазерного излучения, что снижает эффективность использования приведенных способов по обнаружению и определению пространственных координат МБЛА.
Способ обнаружения объектов (патент РФ №2331084 прототип) заключается в селекции объекта на удаленном фоне, заключающийся в приеме и формировании двух изображений в двух пространственно разнесенных точках, а также одновременной регистрации сформированных цифровых изображений, отличающийся тем, что опорное и сравниваемое цифровые изображения регистрируют одномоментно для каждого фрагмента (пикселя) изображений двумя идентичными видеосистемами на основе многоэлементных высокоскоростных фотоприемников, например CMOS-матриц с объективами, которые предварительно фиксируют на небольшом, по сравнению с удалением от предполагаемого места появления объекта, расстоянии между собой параллельно друг другу в направлении на контролируемое пространство, а анализ изображений проводят при помощи определения величин смещения Δ характерных фрагментов сравниваемого изображения с аналогичными фрагментами опорного при максимально возможном их совпадении в направлении параллактического смещения и последующего выявления селектируемого и фоновых объектов из полученных смещений Δ и т.д. [5].
Известный способ имеет следующие недостатки: невозможно обнаружить МБЛА на 360° по горизонтали и на 90° по вертикали, так как он позволяет обнаружить объект в направлении на контролируемое пространство в переделах работы видеосистем на основе многоэлементных высокоскоростных фотоприемников, например CMOS-матриц с объективами, невозможностью определения пространственных координат МБЛА и определения их дальнейшего направления движения.
Задачей, стоящей перед настоящим изобретением, является повышение возможности обнаружения МБЛА на 360° по горизонтали и на 90° по вертикали, определение пространственных координат МБЛА и его дальнейшего направления движения, с целью последующей борьбы с ними.
Поставленная задача решается следующим образом.
В способе пассивного обнаружения и определения координат МБЛА, заключающемся в приеме и формировании двух изображений в трех точках 1 с двумя равными базами 2, размещенными на Г-образной платформе с углом 90° посередине и с четырьмя стереопарами, состоящими из восьми телевизионных датчиков 3 с одинаковыми характеристиками, размещенными под углами 45° выше линии горизонта, при этом в средней точке размещены четыре телевизионных датчика 3, расположенных по горизонтали через каждые 90° (фиг. 1), тем самым в сумме создавая обзор пространства на 360° и возможностью обнаруживать МБЛА в пространстве. В двух остальных точках комплекта телевизионные датчики размещены по горизонтали через 180 друг от друга (фиг. 1), тем самым образуя стереопары с четырьмя телевизионными датчиками центральной точки. Такое построение стереопар предназначено для определения дальности до МБЛА 6 в пассивном режиме на 360 по горизонтали и на 90° по вертикали. Все телевизионные датчики жестко закреплены и строго отъюстированы между собой по парам и имеют выходы соответственно соединенные с входами ЭВМ 4 (фиг. 2). Соединение между телевизионными датчиками 3 и ЭВМ осуществляется проводами, проложенными внутри платформы 2 и кабель-канала 5. Питание всех элементов устройства производится от аккумуляторной батареи ЭВМ 4 (фиг. 3).
Управление работой и обработкой полученной информации осуществляется программным обеспечением ЭВМ 4, в которое вводятся исходные данные: координаты Г-образной платформы (Xпл,Yпл,Zпл) и величины ориентирования ее по направлению в пространстве. Данные вводятся в автоматическом режиме с помощью датчика топопривязки и навигации 7 [6].
Способ пассивного обнаружения и определения координат малогабаритных беспилотных летательных аппаратов работает следующим образом: электромагнитное излучение от МБЛА 6 поступает на два телевизионных датчика, в данном случае стереопара: 3.1.2 и 3.2.2 (фиг. 3). Обнаружение МБЛА 6 происходит на основе сравнения кадров видеопоследовательности и определения геометрических и цветовых изменений сформированных изображений телевизионным датчиком 3.2.2 [5]. ЭВМ 4 автоматически выбирает основной телевизионный датчик для определения дальности до МБЛА, в данном случае - 3.1.2 и для определения угла γ телевизионный датчик - 3.2.2 (фиг. 4).
Дальность D до МБЛА определяется по величине параллактического угла γ и по величине базы прибора Б (стереоскопический базовый метод измерения дальности) [6], определяемой положением точки проецирования МБЛА на матрице ПЗС 8 (фиг. 5)

В приборе угол γ определяется исходя из величины линейного параллакса P, измеренного по прибору как

где f - фокусное расстояние объективов прибора.
Анализ изображений проводится с помощью ЭВМ 4 и определяется величина смещения точки пикселя оптической оси P3.1.2 (телевизионный датчик 3.1.2), которая является точкой луча для определения дальности D1 9 и точкой пикселя, параллельной оптической оси стереопары (телевизионный датчик 3.2.2), относительно ее определяется Р3.2..2 10 и соответственно γ (фиг. 5). Телевизионные датчики жестко закреплены, отъюстированы и скоординированы их матрицы ПЗС, поэтому ошибка определения расстояния до МБЛА не большая.
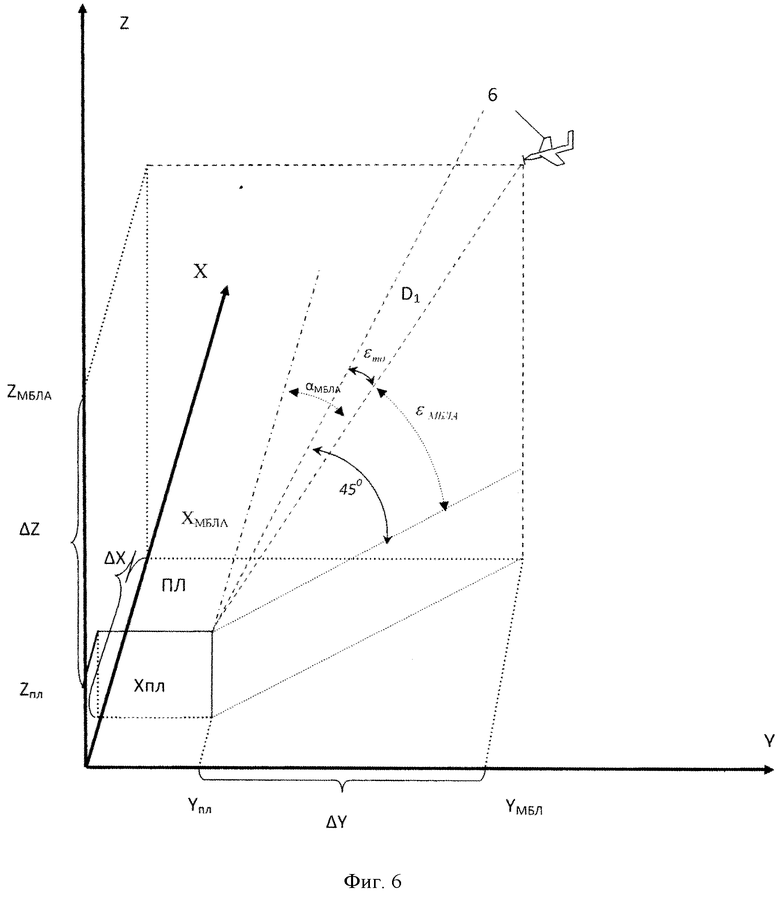
Дальность D1 до МБЛА определяется по формулам (1) и (2) с учетом величин параллактического угла γ=P3.2.2/f и базы между телевизионными датчиками Б (фиг. 6). Используя координаты Г-образной платформы и углы направления εМБЛА, αМБЛА, ЭВМ 4 рассчитывает пространственные координаты МБЛА в оптическом диапазоне электромагнитных волн. Анализируя изменяющиеся пространственные координаты МБЛА 6, ЭВМ 4 определяет скорость и направление движения, что позволяет производить сопровождение МБЛА.
Информация о координатах Г-образной платформы рассчитывается в автоматическом режиме и поступает с датчика топопривязки и навигации 7 или введенных данных в ручном режиме, полученных с топографических карт (например, Xпл, Yпл, Zпл), поступает в ЭВМ 4. В ЭВМ 4 полученные данные о расстоянии между Г-образной платформой и МБЛА, равном D1, горизонтальном угле αМБЛА и вертикальном угле εМБЛА (телевизионного датчика), в данном случае εМБЛА=45°-εтд, с Г-образной платформы на МБЛА 6, обрабатываются и рассчитываются пространственные координаты МБЛА по формулам 
 (фиг. 6), где угол по горизонтали - βМБЛА рассчитывается формуле
(фиг. 6), где угол по горизонтали - βМБЛА рассчитывается формуле  (Pα величина приращения параллактического смещения Ρ3.1.2 по оси X ПЗС - матрицы телевизионного датчика), а угол по вертикали εтд рассчитывается по формуле
(Pα величина приращения параллактического смещения Ρ3.1.2 по оси X ПЗС - матрицы телевизионного датчика), а угол по вертикали εтд рассчитывается по формуле  , (P εтд величина приращения параллактического смещения Р3.1.2 по оси Υ ПЗС - матрицы телевизионного датчика) (фиг. 5) [4].
, (P εтд величина приращения параллактического смещения Р3.1.2 по оси Υ ПЗС - матрицы телевизионного датчика) (фиг. 5) [4].
На основе постоянной корректировки местоположения МБЛА на мониторе ЭВМ 4 оператору выдается информация текущих координат и расстояния до цели, а также вырисовывается направление его движения для прицеливания средства борьбы с МБЛА.
Таким образом, способ пассивного обнаружения и определения координат малогабаритных беспилотных летательных аппаратов, имея малые габариты, энергопотребление и стоимость, позволяет обнаруживать МБЛА на 360° по горизонтали и на 90° по вертикали, в оптическом диапазоне электромагнитных волн, определяя пространственные координаты МБЛА в пассивном режиме, с целью последующей борьбы с ними.
Источники информации
1. Броун Φ.М., Волков Р.И., Филатов М.И., Хазов A.M. Способ кругового обзора матричным фотоприемным устройством и устройство для его осуществления. - ФИПС. Патент на изобретение №2445644, 20.03.2012 г.
2. Архипов В.Г., Чжан Ю.В. Оптический локатор кругового обзора. - ФИПС. Патент на изобретение №2352957, 20.04.2009 г.
3. Попсуй С.П., Таурин В.Э., Швецов И.В., Швецова С.А. Способ визуально-оптического контроля лазерного сканирования атмосферы. - ФИПС. Патент на изобретение №2489732, 10.08.2013 г.
4. Шишков С.В. Способ автоматизированного определения координат беспилотных летательных аппаратов. - ФИПС. Патент на изобретение №2523446, 26.05.2014 г.
5. Подгорнов В.А. Способ обнаружения объектов. - ФИПС. Патент на изобретение №2331084, 10.08.2008 г.
6. Шишков С.В. Программа определения геометрических изменений на кадрах видеопоследовательности для обнаружения ДПЛА / Музаи К., Устинов Е.М., Пархоменко А.В., Чернов Е.М., Щербаков А.С. / Свидетельство о государственной регистрации программы для ЭВМ №2013611694, 31.01.13. Федеральный институт промышленной собственности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕТОД ПОРАЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2572924C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСНЫМИ МЕТОДАМИ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2014 |
|
RU2578524C2 |
| МЕТОД ОБНАРУЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2559332C1 |
| ТЕПЛОВИЗИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ТИПА "МУЛЬТИКОПТЕР" | 2020 |
|
RU2758881C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПОДАВЛЕНИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ МАЛЫХ БЕСПИЛОТНЫХ ВОЗДУШНЫХ СУДОВ | 2018 |
|
RU2680605C1 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2565860C2 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| ТЕРМОБАРИЧЕСКИЙ СПОСОБ БОРЬБЫ С РОЕМ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2733600C1 |
| СПОСОБ ГОЛОГРАФИЧЕСКОЙ СКРЫТНОСТИ ОБЪЕКТОВ ОТ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2571534C2 |

Изобретение относится к области обнаружения, распознавания и определения координат малогабаритных беспилотных летательных аппаратов (МБЛА) и прицеливания по ним и может быть использовано в военной технике. Прием и формирование изображений осуществляют в трех точках, размещенных на Г-образной платформе с двумя равными базами под углом 90°. В средней точке размещены четыре телевизионных датчика, размещенных по горизонтали через каждые 90°, тем самым в сумме создавая обзор пространства на 360° и возможность обнаруживать МБЛА в пассивном режиме. Две другие точки комплекта телевизионных датчиков размещены по горизонтали через 180° друг от друга, тем самым образуя стереопары с четырьмя телевизионными датчиками центральной точки для определения дальности и координат до МБЛА в пассивном режиме. Технический результат - повышение возможности обнаружения МБЛА. 3 з.п. ф-лы, 6 ил.
1. Способ пассивного обнаружения и определения координат малогабаритных беспилотных летательных аппаратов (МБЛА), заключающийся в селекции объекта на удаленном фоне, приеме и формировании изображений в пространственно разнесенных точках, а также одновременной регистрации сформированных цифровых изображений высокоскоростными фотоприемниками, анализ изображений проводят при помощи определения величин смещения характерных фрагментов сравниваемого изображения с аналогичными фрагментами опорного, отличающийся тем, что в приеме и формировании изображений используются три точки с двумя равными базами, размещенными на Г-образной платформе с углом 90° посередине и с четырьмя стереопарами, состоящими из восьми телевизионных датчиков с одинаковыми характеристиками, размещенных под углами 45° выше линии горизонта, при этом в средней точке размещены четыре телевизионных датчика, размещенных по горизонтали через каждые 90°, тем самым в сумме создавая обзор пространства на 360° и возможность обнаруживать МБЛА в пассивном режиме.
2. Способ пассивного обнаружения и определения координат МБЛА по п. 1, отличающийся тем, что две другие точки комплекта телевизионных датчиков размещены по горизонтали через 180° друг от друга, тем самым образуя стереопары с четырьмя телевизионными датчиками центральной точки для определения дальности до МБЛА в пассивном режиме.
3. Способ пассивного обнаружения и определения координат МБЛА по п. 1, отличающийся тем, что анализ изображений проводится с помощью ЭВМ и определяется величина смещения точки пикселя оптической оси первого телевизионного датчика стереопары, которая является точкой луча для определения дальности до МБЛА и точкой пикселя параллельной оптической оси второго телевизионного датчика стереопары, относительно которой определяется смещение пикселя как величина линейного параллакса Ρ и рассчитывается параллактический угол γ по выражению γ=P/f, где f - фокусное расстояние объективов телевизионных датчиков, дальность до МБЛА рассчитывается по формуле Д=Б/tgγ, где Б - расстояние между стереопарами.
4. Способ пассивного обнаружения и определения координат МБЛА по п. 1, отличающийся тем, что и определения пространственных координат XМБЛА, УМБЛА, ZМБЛА заключается в расчете ЭВМ по формулам XМБЛА=XПЛ+ΔX=XПЛ+Дcos (αМБЛА), УМБЛА=УПЛ+ΔУ=УПЛ+Дsin (αМБЛА), ZMBЛA=ZПЛ+ΔZ=ZПЛ+Дsin (εМБЛА), где αМБЛА - угол по горизонтали, который рассчитывается по величине приращения параллактического смещения точки пикселя по оси X ПЗС - матрицы телевизионного датчика, εМБЛА - угол по высоте, который рассчитывается по формуле εМБЛА=45°±εтд, где εтд рассчитывается по величине приращения параллактического смещения точки пикселя по оси Y ПЗС - матрицы телевизионного датчика, при этом информация о пространственных координатах Г-образной платформы XПЛ, YПЛ, ZПЛ вводится в ЭВМ в ручном режиме или в автоматическом режиме с датчика топопривязки и навигации.
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2006 |
|
RU2331084C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЕ КООРДИНАТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2523446C2 |
| RU 144029 U1, 10.08.2014 | |||
| US 6639545 B1, 28.10.2003. | |||

