Изобретение относится к радиолокационным устройствам и может быть использовано для точного определения расстояния от радиолокационной станции до воздушного объекта.
Известно устройство определения дальности [1], в котором синхронизатор выдает синхронизирующий сигнал в передающее устройство, разрешая излучение радиоимпульса в пространство, а также в преобразователь дальности для осуществления начала отсчета дальности. Отраженный от воздушного объекта сигнал поступает в приемное устройство, осуществляющее преобразование электромагнитной энергии в электрический сигнал, поступающий в преобразователь дальности, который определяет временное рассогласование между импульсом синхронизатора и сигналом приемного устройства. Измеренное временное рассогласование по известным зависимостям преобразуется в информацию о дальности. Дальность до объекта отображается на индикаторе. Точность определения дальности в данном устройстве не всегда достаточна. Аналогичные указанному выше устройства представлены в [2].
Известно система (устройство) измерения дальности воздушного объекта [3], содержащее передающее устройство, вход которого связан с выходом синхронизатора и первым входом преобразователя дальности (ПД), второй вход которого соединен с выходом приемного устройства, а выход - с первым входом первого вычитателя и входом датчика измерения дальности до эталонного объекта, выход которого связан со вторым входом второго вычитателя и входом постоянного запоминающего устройства, выход которого подключен к первому входу второго вычитателя, выход которого соединен со вторым входом первого вычитателя, связанного своим выходом со входом индикатора.
Данное устройство позволяет измерять дальность до объекта локации (воздушного объекта) и уточнять ее по отраженным сигналам от эталонного объекта (ЭО), которым может быть местный предмет (здание, остров в океане, вышка линии электропередач и т.п.). За счет поправки измерения, вычисляемой между текущими отражениями от ЭО и заранее проведенными точными достоверными измерениями расстояния до ЭО, устраняются ошибки определения дальности, связанные с рефракцией радиоволн и другими негативными факторами оценивания временных задержек радиолокационного сигнала. Однако эффективность работы данного устройства не может быть признана высокой ввиду следующих обстоятельств. Во-первых, в направлении представляющего интерес объекта может не существовать ЭО. Во-вторых, местные предметы, используемые в качестве ЭО, имеют, как правило, малую высоту и могут использоваться для уточнения дальности только низколетящих воздушных объектов (ВО). В третьих, пеленгуемый ВО может иметь дальность, близкую к дальности существующего на данном угловом направлении ЭО, что не позволяет различить отраженный воздушным объектом сигнал от сигнала, рассеянного ЭО, что приводит к методической ошибке уточнения дальности.
Задачей изобретения является совершенствование системы измерения дальности до воздушного объекта, а именно - придание ей способности компенсации неточностей измерения дальности до воздушного объекта, связанных с явлением рефракции, при любых условиях локации, в том числе при отсутствии эталонных отражателей в направлении пеленгуемого воздушного объекта.
Решение задачи изобретения предлагается построить на основе использования специализированного беспилотного летательного аппарата (БЛА) с активным ответом на зондирующие запросные сигналы, частота которых отличается от основной частоты излучения радиолокационной станции, на базе которой реализуется система измерения дальности. Специализированный беспилотный летательный аппарат (СБЛА) предлагается располагать в области предполагаемого появления ВО. А управлять положением СБЛА предлагается с помощью излучаемых системой измерения дальности (СИД) кодовых сигналов управления. Для уверенного приема сигналов о координатах местоположения СБЛА предлагается использовать излучение ответных сигналов с борта СБЛА с информацией, полученной бортовой системой GPS СБЛА. Это позволит учитывать ошибку измерения дальности ВО, связанную с рефракцией радиоволн, с любого направления, на любой высоте в диапазоне высот полета БЛА, в условиях полного отсутствия отражателей естественного или производственного происхождения.
Для решения задачи изобретения конструкцию известной системы измерения дальности ВО [1] предлагается дополнить первым и вторым антенными переключателями (АП), двумя антеннами, блоком управления СБЛА, приемным устройством сигналов СБЛА (ПУССБЛА), передатчиком сигналов запроса специализированного БЛА (ПСЗСБЛА), вторым преобразователем дальности (ПД), а также специализированным БЛА. При этом вход-выход первой антенны предлагается подключить к вход-выходу первого АП, вход которого - соединить с выходом передающего устройства. Второй вход ПСЗСБЛА предлагается соединить с выходом синхронизатора и первым входом второго ПД, выход которого - подключить ко второму входу второго вычитателя, а второй вход - ко второму выходу ПУССБЛА, вход которого - соединить с выходом второго АП. Первый выход блока управления СБЛА предлагается связать с первым входом ПСЗСБЛА, а второй выход - с третьим входом первого вычитателя, первый вход которого подключить ко второму входу блока управления СБЛА, первый вход которого соединить с первым выходом ПУССБЛА и первым входом второго вычитателя, а механический вход - с механическим выходом первой антенны. Выход первого АП предлагается связать с входом приемного устройства, вход второго АП соединить с выходом ПСЗСБЛА, а вход-выход второго АП связать с вход-выходом второй антенны.
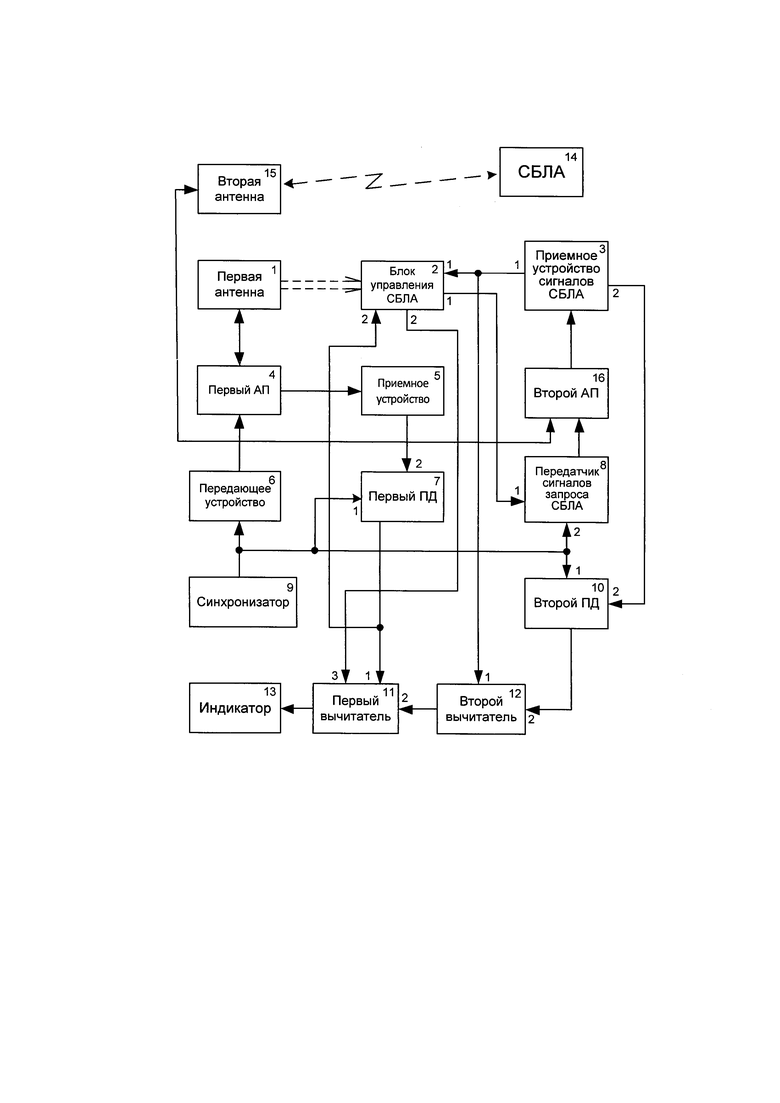
Структурная схема системы измерения дальности воздушного объекта показана на чертеже. Схема включает первую антенну 1, блок управления СБЛА (БУСБЛА) 2, ПУССБЛА 3, первый АП 4, приемное устройство 5, передающее устройство 6, первый ПД 7, передатчик сигналов запроса СБЛА 8, синхронизатор 9, второй ПД 10, первый вычитатель 11, второй вычитатель 12, индикатор 13, СБЛА 14, вторую антенну 15 и второй АП 16.
При этом вход-выход первой антенны 1 подключен к вход-выходу первого АП 4, выход которого соединен со входом приемного устройства 5. Первый выход ПУССБЛА 3 связан с первым входом второго вычитателя 12 и первым входом блока управления СБЛА 2, механический вход которого связан своим приводом с механическим выходом первой антенны 1. Первый выход блока управления СБЛА 2 подключен к первому входу ПСЗСБЛА 8, выход которого связан со входом второго АП 16, выход которого подключен ко входу ПУССБЛА 3, второй выход которого связан с вторым входом второго ПД 10, выход которого соединен со вторым входом второго вычитателя 12. Выход синхронизатора 9 подключен к первому входу первого ПД 7, входу передающего устройства 6, второму входу ПСЗСБЛА 8 и первому входу второго ПД 10. Выход приемного устройства 5 связан со вторым входом первого ПД 7, выход которого соединен с первым входом первого вычитателя 11 и вторым входом БУСБЛА 2, второй выход которого подключен к третьему входу первого вычитателя 11, выход которого связан со входом индикатора 13, а второй вход - с выходом второго вычитателя 12. Выход передающего устройства 6 связан со входом первого АП 4, а вход-выход второй антенны 15 соединен с вход-выходом второго АП 16.
Система измерения дальности воздушного объекта работает следующим образом. Синхронизатор 9 вырабатывает синхронизирующие импульсы, которые поступают на вход передающего устройства 6, первые входы первого ПД 7, второго ПД 10, а также - на второй вход ПСЗСБЛА 8. Синхронизирующие сигналы обеспечивают запуск и синхронизацию работы передатчиков 6 и 8, использующих сигналы соответствующих разных частот (f1 и f2). Разнос по времени между излучаемыми сигналами передающего устройства 6 на частоте fl и сигналами ПСЗСБЛА 8 на частоте f1 обеспечивается задержкой, осуществляемой в блоке 8 с помощью встроенной линии задержки. Сигналы синхронизатора 9 на первых входах преобразователей дальности 7 и 10 обеспечивают определение времени задержки между излучаемыми и принимаемыми сигналами. Пример использования преобразователя дальности представлен в [4]. При отсутствии возможности разделения по времени сигналов передатчиков 6 и 8 возможен вариант поочередного зондирования их сигналами пространства, при котором в четных периодах повторения используются сигналы на частоте f1, а в нечетных - сигналы на частоте f1.
Передающее устройство 6 формирует излучаемый сверхвысокочастотный сигнал на частоте f1 порядка 109-1010 Гц и подает его на вход первого АП 4, который закрывает канал приема на время существования мощного излучаемого сигнала. Пройдя первый АП 4, зондирующий сверхвысокочастотный импульс поступает с вход-выхода первого АП 4 на вход-выход первой антенны 1 и излучается ею в направлении воздушного объекта. Отраженные ВО сигналы могут быть приняты первой антенной 1 только при нахождении ВО в луче характеристики направленности антенны 1, то есть при направленности апертуры антенны 1 в сторону ВО. Привод антенны 1 механически (шестеренчато-валовой передачей) связан с входным приводом БУСБЛА 2. Таким образом угловые координаты угла места εво и азимута βво воздушного объекта, связанные с угловым положением входного привода БУСБЛА 2, передаются в БУСБЛА посредством механической связи входного привода блока 2 с приводом антенны 1.
Цепи управления угловым положением первой антенны 1 и второй антенны 15 на чертеже не показаны. Предполагается, что они обеспечивают постоянное подслеживание первой антенной 1 направления на ВО, а второй антенной 15 - направления на СБЛА 14. Порядок сопровождения ВО по угловым координатам является известным [5-7] и не влияет на сущность предполагаемого изобретения. Отслеживание углового положения СБЛА второй антенной происходит по известным системе угловой автоматики (системе управления антенной) координатам СБЛА, которые поступают в СИД в виде сообщений с борта СБЛА 14.
Отраженные ВО сигналы принимаются первой антенной 1 и с ее вход-выхода поступают на вход-выход первого АП 4, пройдя который поступают на вход приемного устройства 5. Входной фильтр блока 5 не пропускает в приемник 5 сигналы на частоте f2, которая используется каналом запроса СБЛА 14 и каналом обработки ответных сигналов СБЛА. Приемное устройство 5, входной фильтр которого настроен на частоту f1, усиливает принятые отраженные сигналы и передает их со своего выхода на второй вход первого преобразователя дальности 7. Назначением блока 7 является определение временного рассогласования между импульсами синхронизатора 9 и принятыми отраженными ВО сигналами в каждом периоде зондирования. Временное рассогласование связано известной аналитической зависимостью [5-7] с дальностью до ВО. Пример использования преобразователя дальности представлен в [4].
Сигнал, пропорциональный дальности до ВО Dво с выхода первого ПД 7 поступает на первый вход первого вычитателя 11. В вычитателях 11 и 12 определяется разность между значениями дальностей, поступающих на их разные входы. Пример использования вычитателя приведен в [8]. Ввиду наличия эффекта рефракции [9] дальность до ВО, извлеченная из отраженных сигналов блоком 7, может быть недостаточно точной. Для ее уточнения используется поправочный сигнал ΔDбла, поступающий на второй вход первого вычитателя 11 с выхода второго вычитателя 12. Для получения поправочного сигнала ΔDбла используются сигналы СБЛА 14.
Вторая антенна 15 в процессе работы СИД постоянно отслеживает положение СБЛА 14 по координатам местонахождения СБЛА, которые в виде кодовых последовательностей в ответных сигналах СБЛА 14 поступают в СИД через вторую антенну 15. Другими словами, специализированный БЛА 14 периодически излучает в направлении раскрыва второй антенны 15 СИД кодовые сигналы на частоте f2, в которых содержится информация о его собственных декартовых координатах Xбла,Yбла, Zбла, полученная с помощью бортового GPS приемника СБЛА 14 [10, 11]. Эти сигналы принимаются второй антенной 15 и поступают с ее вход-выхода на вход-выход второго АП 16, а далее с его выхода - на вход ПУССБЛА 3. В блоке 3 излученные бортовой антенной СБЛА 14 сигналы усиливаются, дешифрируются, и из них извлекается информация о координатах СБЛА 14 Xбла,Yбла,Zбла. Эта информация с первого выхода ПУССБЛА 3 передается на первый вход БУСБЛА 2. Поскольку декартовы координаты X0,Y0, Z0 первой антенны СИД являются известными, на основе знания координат первой антенны СИД и координат СБЛА Xбла,Yбла,Zбла в блоке 3 по известным зависимостям [12-14] проводится точный расчет наклонной дальности до СБЛА Dбла+, значение которой с первого выхода ПУССБЛА 3 поступает на первый вход БУСБЛА 2 и первый вход второго вычитателя 12.
Отбор блоком 2 и блоком 12 сигналов, востребованных их назначением, может быть обеспечен временным стробированием, амплитудной величиной соответствующего сигнала, полярностью сигналов с необходимой информацией и т.д. Для сигналов дальности Dбла+ и координат Xбла,Yбла,Zбла могут быть предусмотрены и отдельные выходы блока 3. В представленном варианте преполагается, что блок 2 и блок 12 имеют возможность селектировать по времени или по полярности необходимые для своей работы сигналы, выработанные блоком 3.
Вторая антенна 15 периодически излучает на частоте f2 в направлении СБЛА 14 специальный запросный сигнал Uк для измерения дальности до СБЛА по времени запаздывания ретранслируемого (имитирующего отраженный) сигнала, а также кодовые последовательности с информацией о координатах ВО, а точнее о величинах несоответствий декартовых координат СБЛА 14 и ВО ΔX,ΔY,ΔZ. Сигнал Uк имеет особую длительность или особую кодовую метку, позволяющую отличить его от других информационных сигналов. Принятый бортовой аппаратурой СБЛА 14 сигнал Uк усиливается и без задержки ретранслируется в направлении второй антенны 15. При наличии небольшой задержки Δτ между принятым сигналом Uк и ретранслируемым СБЛА сигналом Uкр временная задержка Δτ всегда является априорно известной, а следовательно может быть учтена при измерении дальности до СБЛА по времени запаздывания.
Принятый второй антенной 15 переизлученный (ретранслированный) сигнал Uкр с ее вход-выхода поступает на вход-выход второго АП 16 и далее с его выхода - на вход ПУССБЛА 3, где усиливается, проходит согласованную обработку и с второго выхода блока 3 поступает на второй вход второго преобразователя дальности 10. Путем определения временного рассогласования между синхроимпульсом (поступающим на первый вход) и ретранслированным сигналом Uкр (поступающим на второй вход) ПД 10 определяет наклонную дальность Dбла- ДО СБЛА 14, искаженную эффектом рефракции, и подает соответствующий этой дальности сигнал со своего выхода на второй вход второго вычитателя 12. На выходе блока 12 формируется сигнал, выражающий собой разность между значениями дальностей до СБЛА, полученными точным расчетом Dбла+ (на первом входе блока 12) и путем стандартной обработки Dбла- в ПУССБЛА 3 ретранслированного сигнала Uкр (на втором входе). С выхода блока 12 сигнал разности дальностей ΔDбла поступает на второй вход первого вычитателя 11.
Сигнал разности дальностей ΔDбла, поступая на второй вход вычитателя 11, используется им для уточнения величины дальности ВО Dво, поступившей на первый вход с выхода первого ПД 7.
Как уже отмечалось, в установленные режимом приема сигналов интервалы времени СБЛА 14 периодически излучает в направлении второй антенны 15 кодовые сигнальные расстановки, в которых содержится информация о координатах местоположения СБЛА Хбла,Yбла,Zбла. Эти сигналы, пройдя вторую антенну 15 и второй АП 16, поступают на вход ПУССБЛА 3, где дешифрируются и в виде значений координат Хбла,Yбла,Zбла с первого выхода блока 3 поступают на первый вход БУСБЛА 2. Угловые координаты ВО εво, βво определяются в блоке 2 по положению механического входного привода, а величина измеренной до ВО дальности Dво поступает в БУСБЛА 2 (на второй вход) с выхода первого ПД 7. Сферические координаты ВО (εво, βво, Dво) по известным выражениям [12, 14] пересчитываются в декартовы координаты ВО (Xво,Yво, Zво), что позволяет сравнить в блоке 2 декартовы координаты ВО и СБЛА 14, а затем выработать сигналы несоответствия ΔX,ΔY,ΔZ положений ВО и СБЛА 14. Эти сигналы несоответствия с первого выхода БУСБЛА 2 поступают на первый вход ПСЗСБЛА 8 и после соответствующего усиления через второй АП 16 на частоте f2 излучаются второй антенной 15 в направлении СБЛА 14. Синхроимпульсы, поступающие на второй вход ПСЗСБЛА 8 (они же поступают на вход передающего устройства 6), определяют величину периода повторения сигналов запроса СБЛА 14 и зондирующих сигналов блока 6, а также обеспечивают синхронизацию каналов обработки на частотах f1 и f2. Принятые бортовой аппаратурой СБЛА 14 сигналы ΔX,ΔY,ΔZ используются им для перемещения в район нахождения ВО, обеспечивая адекватность влияния рефракции на измерение дальности до СБЛА и ВО. Кроме того, сигналы несоответствия ΔX,ΔY,ΔZ в БУСБЛА 2 сравниваются с пороговыми значениями сближений Xп,Yп,Zп, и при выполнении условий ΔХ<Хп, ΔY<Yп, ΔZ<Zn в БУСБЛА 2 вырабатывается сигнал, разрешающий проводить уточнение измеряемой дальности, который с второго выхода БУСБЛА 2 поступает на третий вход первого вычитателя 11, разрешая ему выдавать со своего выхода значение измеренной дальности на индикатор 13 или выводить на индикаторе рядом с отметкой от ВО специальный формуляр с величиной измеренной дальности.
Таким образом, использование специализированного БЛА, находящегося поблизости от ВО (степень близости определяется пороговыми значениями сближений Xп,Yп,Zп), позволяет учесть и нейтрализовать негативное влияние рефракции на отраженный от ВО сигнал.
Передатчик 8 может быть построен по типовой схеме аналогично передающему устройству 6 прототипа. Приемное устройство 3 сигналов СБЛА и блок управления 2 СБЛА должны иметь в своем составе аналого-цифровые преобразователи, процессоры для проведения расчетов, а также цифро-аналоговые преобразователи и управляемые линии задержки для формирования выходных сигналов требуемой полярности и расположенных в требуемых временных интервалах. Такое построение блоков 2 и 3 является реализуемым [6, 15] на современном уровне развития техники. Оснащение СБЛА системой управления полетом и бортовой радиолокационной станцией с возможностью активного ответа на запрос также является известным [16-20]. Таким образом, возможность осуществления предполагаемого изобретения очевидна.
Предложенная система измерения дальности воздушного объекта может быть рекомендована для реализации в радиолокационных станциях и системах пеленга воздушных объектов, где требуется высокая точность измерения координат, в том числе наклонной дальности.
Источники информации
1. Радиотехнические системы. Учеб. для вузов. Под ред. Ю.М. Казаринова. М.: Высш. школа. 1990. 496 с. С. 262-265 (аналог).
2. Пестряков В.Б., Кузенков В.Д. Радиотехнические системы. Учеб. для вузов. М.: Радио и связь. 1985. 376 с.
3. Патент РФ №2416104. МПК G01S 13/08. Устройство определения дальности. Часовской А.А. Заявка №2010102759 от 27.01.2010. Опубл. 10.04.2011. Бюл. 10 (прототип).
4. Васин В.В., Степанов Б.М. Справочник-задачник по радиолокации. М., 1977. С. 214. Фиг. 9.7.
5. Теоретические основы радиолокации / Под ред. В.Е. Дулевича. М.: Сов. радио, 1978. 608 с.
6. Ширман Я.Д. Радиолокационные системы. Основы построения и теория. М., Радиотехника. 2007. 512 с.
7. Финкельштейн М.И. Основы радиолокации. М.: Радио и связь. 1983. 536 с.
8. Орлов И.А., Корнюшко В.Ф. Основы вычислительной техники и организация вычислительных работ. М.: Энергоатомиздат, 1984. С. 94-96.
9. Колосов М.А., Шабельников А.В. Рефракция электромагнитных волн в атмосферах Земли, Венеры и Марса. М., Сов. радио. 1976. 220 с.
10. Соловьев Ю.А. Системы спутниковой навигации. М.: Эко-Трендз. 2000. 267 с.
11. Корецкая Г.А. Спутниковые навигационные системы в маркшейдерии. Учеб. пособие. Кемерово: КузГТУ. 2012. 93 с.
12. Неупокоев Ф.К. Стрельба зенитными ракетами. М.: Воениздат, 1991. 343 с.
13. Бартон Д., Вард Г. Справочник по радиолокационным измерениям. Пер. с англ. М.М. Вейсбена. М.: Сов. радио, 1976. 392 с.
14. Выгодский М.Я. Справочник по высшей математике. М. 1977. 872 с.
15. Справочник по радиолокации. В 4-х томах / Под ред. М.И. Сколника. Пер. с англ. М.: Сов. радио, 1967.
16. Мосов С.П. Беспилотная разведывательная авиация стран мира: история создания, опыт боевого применения, современное состояние, перспективы развития. Монография. Киев: Изд. дом «Румб», 2008. 160 с.
17. https://infopedia.su/20x54a6.html.
18. Шилов К.Е. Разработка системы автоматического управления беспилотным летательным аппаратом мультироторного типа. Труды МФТИ. 2014. Т. 6. №4. С. 139-152.
19. Купряшкин И.Ф., Лихачев В.П., Рязанцев Л.Б. Малогабаритные многофункциональные РЛС с непрерывным частотно-модулированным излучением. М., Радиотехника. 2020. 280 с.
20. Макаренко С.И. Противодействие беспилотным летательным аппаратам. Санкт-Петербург: «Наукоемкие технологии». ООО «Корпорация «Интел Групп». 2020. 204 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Способ организации комбинированного заграждения на маршруте движения вооружения и техники противника | 2017 |
|
RU2665674C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ ВЫПОЛНЕНИЮ ЗАДАЧ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2012 |
|
RU2497063C2 |
| СПОСОБ ВОДНОГО ДЕСАНТИРОВАНИЯ БРОНЕТЕХНИКИ В ЗОНУ ВЕДЕНИЯ БОЕВЫХ ДЕЙСТВИЙ С ОБЕСПЕЧЕНИЕМ САМОСОХРАНЕНИЯ И БЕЗОПАСНОСТИ НАПЛАВУ | 2012 |
|
RU2491495C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНОГО РАДИОЛОКАЦИОННОГО ОБЪЕКТА НАБЛЮДЕНИЯ С ВЫБОРОМ ИНТЕРВАЛА МАКСИМИЗАЦИИ УГЛОВОЙ СКОРОСТИ ЕГО ПОВОРОТА ПРИ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЯХ ДВИЖЕНИЯ | 2010 |
|
RU2427001C1 |
Изобретение относится к радиолокационным устройствам и может быть использовано для точного определения расстояния от радиолокационной станции до воздушного объекта (ВО). Техническим результатом изобретения является обеспечение в системе измерения дальности до воздушного объекта способности компенсации неточностей измерения дальности до воздушного объекта, связанных с явлением рефракции. Указанный результат достигается за счёт введения в систему измерения дальности беспилотного летательного аппарата (БЛА) с активным ответом на зондирующие запросные сигналы, частота которых отличается от основной частоты излучения радиолокационной станции. БЛА предлагается располагать в области предполагаемого появления ВО. А управлять положением БЛА предлагается с помощью излучаемых системой измерения дальности кодовых сигналов управления. Для приема сигналов о координатах местоположения БЛА предлагается использовать излучение ответных сигналов с борта БЛА с информацией, полученной бортовой системой GPS БЛА. Конструкцию известной системы измерения дальности предлагается дополнить первым и вторым антенными переключателями, двумя антеннами, блоком управления БЛА, приемным устройством сигналов БЛА, передатчиком сигналов запроса БЛА и вторым преобразователем дальности. 1 ил.
Система измерения дальности воздушного объекта, содержащая приемное устройство, связанное своим выходом со вторым входом первого преобразователя дальности, первый вход которого соединен со входом передающего устройства и выходом синхронизатора, а выход подключен к первому входу первого вычитателя, выход которого связан со входом индикатора, а второй вход - с выходом второго вычитателя, отличающаяся тем, что в ее состав дополнительно вводят специализированный беспилотный летательный аппарат, излучающий в направлении второй антенны кодовые сигналы, в которых содержится информация о его собственных декартовых координатах, а также дополнительно вводят первую и вторую антенны, первый и второй антенный переключатели, блок управления специализированным беспилотным летательным аппаратом, приемное устройство сигналов специализированного беспилотного летательного аппарата, передатчик сигналов запроса специализированного беспилотного летательного аппарата, второй преобразователь дальности, при этом вход-выход первой антенны соединяют с входом-выходом первого антенного переключателя, выход которого связывают со входом приемного устройства, а вход - с выходом передающего устройства, механический выход первой антенны соединяют с механическим входом блока управления специализированным беспилотным летательным аппаратом, второй вход которого подключают к выходу первого преобразователя дальности, а второй выход - к третьему входу первого вычитателя, первый выход блока управления специализированным беспилотным летательным аппаратом соединяют с первым входом передатчика сигналов запроса специализированного беспилотного летательного аппарата, второй вход которого связывают с выходом синхронизатора и первым входом второго преобразователя дальности, выход которого подключают ко второму входу второго вычитателя, а второй вход - к второму выходу приемного устройства сигналов специализированного беспилотного летательного аппарата, вход которого соединяют с выходом второго антенного переключателя, вход-выход которого связывают с входом-выходом второй антенны, а вход - с выходом передатчика сигналов запроса специализированного беспилотного летательного аппарата, первый выход приемного устройства сигналов специализированного беспилотного летательного аппарата соединяют с первым входом блока управления специализированным беспилотным летательным аппаратом и первым входом второго вычитателя.
| КОРРЕЛЯЦИОННО-БАЗОВАЯ СИСТЕМА ЛОКАЦИИ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2674265C1 |
| Способ функционирования радиолокационной системы при измерении скорости полёта беспилотного летательного аппарата малого класса типа мультикоптер и дальности до него | 2018 |
|
RU2697257C1 |
| Способ и устройство передачи информации | 2018 |
|
RU2754430C1 |
| CN 207764373 U, 24.08.2018 | |||
| CN 110799850 A, 14.02.2020 | |||
| US 7777668 B2, 17.08.2010. | |||

