Изобретение относится к способу, устройству и системе для разбиения образца на оптические срезы. Образец может представлять собой ограниченный неоднородный жидкий образец, содержащий частицы, и разбиение на оптические срезы можно использовать для определения одного или нескольких параметров, характеризующих частицы. Изобретение также относится к определению объема ограниченного образца, позволяющему определять концентрацию частиц в объеме. Частицы могут быть биологическими, например эмбрионами, бактериями, паразитами, грибами или клетками. Клетки могут представлять собой клетки крови, например лейкоциты и эритроциты, соматические клетки, дрожжевые клетки, ооциты, бластоциты, зиготы и тромбоциты. Частицы также могут иметь небиологическое происхождение, например металлические осколки, капли воды в масле или пузырьки воздуха в жидкости, пигменты в краске и загрязнение в воде.
Определение концентрации частиц в образце часто используется, например, в связи с диагностированием пациента, когда концентрация лейкоцитов в образце является одним из параметров, используемых для определения фактического заболевания, или в связи с мониторингом состояния машины, когда количество частиц в образце масла из двигателя может указывать на наличие неполадок до того, как они станут критическими.
Определение концентрации частиц в образце можно производить разными способами. Одним из них является проточная цитометрия. Проточная цитометрия требует достаточно дорогого оборудования, во-первых, потому, что расход жидкости нужно контролировать и измерять с очень высокой точностью, чтобы получить достаточно точное измерение объема, во-вторых, потому, что система регистрации должна работать с короткими временами получения для получения достоверных данных о частицах, присутствующих в детекторе, когда они проходят через него. Laor (US 2006/0084125) описывает систему для регистрации биологических частиц в жидком образце, где жидкий образец течет через ячейку для образца, и объектная плоскость устройства оптической регистрации расположена под ненулевым углом к направлению потока.
Другой способ определения концентрации частиц в образце предусматривает микроскопическое наблюдение образца для регистрации и отсчета в ручном или автоматическом режиме частиц, заключенных в некотором заранее известном объеме. Такой способ и соответствующее устройство представлены в патентной заявке WO 2008/010761 от Olesen et al. Согласно этому способу, часть образца изображается на устройстве записи изображения, например 2-мерной ПЗС-камере, и изображение создается за счет пропускания света через образец к устройству записи изображения. Толщина изображаемой части образца ограничена в связи с необходимостью наблюдать и регистрировать частицы через образец. Если образец является слишком толстым, свет будет рассеиваться и поглощаться в образце, создавая изображение низкого качества. Некоторые частицы в образце могут даже заслоняться другими частицами, из-за чего точный отсчет становится трудным или невозможным. Размер изображения ограничен разрешением устройства записи изображения, и, таким образом, объем образца, который можно использовать для регистрации и отсчета частиц, также ограничен. Это не составляет серьезной проблемы, когда концентрация отсчитываемых частиц согласуется с размером объема и размером частицы. Однако в случае высокой концентрации, точное измерение может оказаться трудным или невозможным. В этом случае разведение образца может решить проблему измерения, но об ее существовании можно не знать, пока не будет произведено измерение. В случае низкой концентрации статистика для измерения будет недостаточной, поскольку малые отклонения в счете частиц или малые отклонения в размере объема могут оказывать большое влияние на результат. В этом случае измерение следует производить в большем объеме. В особенности, при использовании способа, предложенного Olesen et al. в WO 2008/010761, для определения распределения разных лейкоцитов, способ может не оправдывать ожиданий. В этом случае важно иметь хорошую статистику, но объем образца ограничен, и если один или несколько типов лейкоцитов имеют низкий счет, статистическая неопределенность может оказаться высокой.
В US 2008/0100703 Yamada описывает микроскопную систему, которая создает фокальную карту образца большой площади по сравнению с площадью, которая обычно изображается микроскопом. Информация из фокальной карты используется при получении изображений разных областей образца. Эти изображения затем объединяются для обеспечения крупномасштабного изображения образца. Для получения изображений разных областей образца берут совокупность изображений одной области на разных глубинах и переносят образец и систему регистрации относительно друг друга до получения изображений другой области. Перенос образца и узла оптической регистрации относительно друг друга осуществляется параллельно объектной плоскости узла оптической регистрации, т.е. оптическая ось и путь сканирования перпендикулярны друг другу, и поверхность устройства для образца параллельна объектной плоскости, т.е. нормаль к поверхности параллельна оптической оси.
Задачей настоящего изобретения является обеспечение устройства, способа и системы для разбиения образца на оптические срезы, где, по меньшей мере, часть образца сканируется путем переноса образца и узла оптической регистрации относительно друг друга вдоль пути сканирования и где оптическая ось узла оптической регистрации расположена под ненулевым углом относительно пути сканирования.
В одном варианте осуществления, устройство, способ и систему, отвечающие изобретению, можно использовать для исследования неоднородного жидкого образца, где анализируемый объем в меньшей степени ограничен узлом оптической регистрации, используемым для исследования образца, по сравнению с рассмотренными выше способами, и устройство просто в эксплуатации. Обнаружено, что способы, предусматривающие использование устройства и системы этого варианта осуществления, также имеют преимущество перед способом, предусматривающим использование проточной цитометрии, и, в частности, выяснилось, что можно избежать, по меньшей мере, части проблем и недостатков способов на основе использования потока, применяемых в проточной цитометрии. Исследование неоднородного жидкого образца может применяться для получения информации о частицах в образце. Информация может представлять собой счет частиц в образце или концентрацию частиц в выбранном объеме образца. Информация также может представлять собой один или несколько параметров, относящихся к частицам, например размер и тип частиц.
Таким образом, согласно одному варианту осуществления настоящего изобретения, предусмотрено устройство для получения совокупности изображений образца, размещенного относительно устройства для образца. Устройство содержит, по меньшей мере, первый узел оптической регистрации, содержащий, по меньшей мере, первое устройство получения изображения. Первый узел оптической регистрации имеет оптическую ось и объектную плоскость. Объектная плоскость содержит область получения изображения, из которой первое устройство получения изображения может регистрировать электромагнитные волны в качестве изображения. Устройство дополнительно содержит, по меньшей мере, один блок переноса, предназначенный для перемещения устройства для образца и первого узла оптической регистрации относительно друг друга, и корпус, предназначенный для поддержки первого узла оптической регистрации и блока переноса, причем первый узел оптической регистрации и блок переноса устроены так, что область получения изображения пересекает, по меньшей мере, часть устройства для образца. Движение устройства для образца и первого узла оптической регистрации относительно друг друга происходит вдоль пути сканирования, который образует угол θ с оптической осью, причем θ больше нуля.
Изобретение также предусматривает способ получения совокупности изображений образца. Этот способ содержит этапы, на которых размещают образец относительно устройства для образца и размещают устройство для образца относительно устройства для получения совокупности изображений. Устройство содержит, по меньшей мере, первый узел оптической регистрации, содержащий, по меньшей мере, первое устройство получения изображения. Первый узел оптической регистрации имеет оптическую ось и объектную плоскость, причем объектная плоскость имеет область получения изображения, из которой первое устройство получения изображения может регистрировать электромагнитные волны в качестве изображения. Область получения изображения пересекает, по меньшей мере, часть образца. Устройство для образца и первый узел регистрации движутся относительно друг друга по длине сканирования вдоль первого пути сканирования. Путь сканирования и оптическая ось образуют угол θ, больший нуля. Способ дополнительно содержит этап, на котором получают совокупность изображений.
Изобретение также предусматривает систему для получения совокупности изображений образца. Система содержит устройство для образца и устройство, имеющее, по меньшей мере, первый узел оптической регистрации, содержащий, по меньшей мере, первое устройство получения изображения. Первый узел оптической регистрации устройства имеет оптическую ось и объектную плоскость. Эта объектная плоскость содержит область получения изображения, из которой первое устройство получения изображения может регистрировать электромагнитные волны в качестве изображения. Устройство этой системы дополнительно содержит, по меньшей мере, один блок переноса, предназначенный для перемещения устройства для образца и первого узла оптической регистрации относительно друг друга, и корпус, предназначенный для поддержки первого узла оптической регистрации и блока переноса, причем первый узел оптической регистрации и блок переноса устроены так, что область получения изображения пересекает, по меньшей мере, часть устройства для образца. Движение устройства для образца и первого узла оптической регистрации относительно друг друга происходит вдоль пути сканирования, который образует угол θ с оптической осью, причем θ больше нуля.
В принципе, путь сканирования может содержать любое движение объектной плоскости и образца относительно друг друга. В частности, путь сканирования может содержать, по существу, прямую линию сканирования, расположенную вдоль оси сканирования. Путь сканирования также может быть образован, по существу, вращательным движением, в каковом случае θ это угол между оптической осью и локальной касательной вращательного движения. В одном варианте осуществления, путь сканирования ограничивается плоскостью, например прямолинейным, круговым движением, движением по спирали или любым другим подходящим путем.
В контексте данной заявки, термины “оптика” и “оптический” используются для описания всего диапазона электромагнитных волн и, в частности, подразумевают электромагнитные волны с длинами волны от приблизительно 0.01 нм до приблизительно 15 км. Иначе говоря, термины “оптика” и “оптический” не ограничиваются электромагнитными волнами в видимом диапазоне и устройствами для обработки и регистрации таких волн, но могут относиться к рентгеновскому диапазону, ультрафиолетовому диапазону, видимому диапазону, инфракрасному диапазону, ультразвуковому диапазону и любому другому диапазону длин волны, который можно использовать для анализа образца.
Соответственно, термин “изображение” используется для описания пространственно разрешенной записи электромагнитных волн во всем электромагнитном диапазоне, включающем в себя электромагнитные волны с длинами волны от приблизительно 0.01 нм до приблизительно 15 км. Иначе говоря, термин “изображение” не ограничивается изображениями, представляющими электромагнитные волны, имеющие длины волны в видимом диапазоне, но также охватывает изображения, представляющие электромагнитные волны, имеющие длины волны вне этого диапазона. Таким образом, изображение может представлять сигналы, например, в рентгеновском диапазоне, ультрафиолетовом диапазоне, видимом диапазоне, инфракрасном диапазоне, ультразвуковом диапазоне и любом другом диапазоне длин волны, который можно использовать для анализа и построения изображения образца.
В данном контексте, “узел оптической регистрации” - это блок, содержащий, по меньшей мере, одно устройство получения изображения, способное получать изображение электромагнитных волн, падающих на устройство получения. Узел оптической регистрации, в необязательном порядке, содержит также оптические приборы для формирования пучка и ориентирования пучка, например линзы, апертуры и зеркала.
“Оптическая ось” узла оптической регистрации - это воображаемая линия, которая образует путь распространения света от образца к устройству получения изображения. Если узел оптической регистрации содержит оптические элементы, способные изменять направление пути света, оптическая ось определяется как воображаемая линия, которая образует путь распространения света от образца к первому оптическому элементу, который изменяет направление пути света.
Термин “неоднородный образец” используется для описания образца, содержащего неоднородности, которые не являются неотъемлемой частью основного материала образца. Жидкий образец, содержащий биологические частицы, или образец масла, содержащий обломки, являются лишь двумя примерами неоднородного образца.
В контексте данной заявки, выражение “по существу, в состоянии покоя” относится к случаю, когда движение частиц в неоднородном жидком образце не влияет на определение параметров образца, например параметров частиц в образце. В одном варианте осуществления, «по существу, в состоянии покоя» относится к случаю, когда перемещение частиц за период времени, прошедший между получением двух соседних изображений в последовательности пространственно смещенных изображений, должно быть существенно меньше расстояния между этими двумя соседними изображениями, например составлять одну десятую этого расстояния. В одном варианте осуществления, «по существу, в состоянии покоя» относится к случаю, когда не существует массового расхода жидкого образца в ходе получения, по меньшей мере, части совокупности изображений. В одном варианте осуществления для изображения клеток и их содержимого, движение клетки может ограничиваться настолько, чтобы можно было получить достаточно резкие изображения клетки, что позволяет определять детали, относящиеся, например, к ядрам. Согласно вариантам осуществления, предусматривающим определение параметров, относящихся к клеткам, выражение “по существу, в состоянии покоя”, таким образом, может означать, что движение клеток в ходе получения изображения может ограничиваться глубиной поля (DOF) или долей DOF, например одной тысячной DOF, например одной сотой DOF, например одной десятой DOF, например одной пятой DOF, например одной третью DOF. DOF может составлять в пределах от 0,1 микрона до 200 микрон. Движение частиц в жидком образце в состоянии покоя может составлять, таким образом, менее 0,001 микрон в секунду, например менее 0,01 микрон в секунду, например менее 0.1 микрон в секунду, например менее 1 микрон в секунду. В этом варианте осуществления параметром частицы может быть количество и размер ядер или расстояние между ядрами в клетке. В одном варианте осуществления, где детали частицы представляют меньший интерес, например где требуется отсчет частицы, на движение частиц налагается такое ограничение, чтобы движение не влияло на отсчет частиц. Движение отсчитываемых частиц может составлять, таким образом, менее 0,01 микрон в секунду, например менее 0,1 микрон в секунду, например менее 1 микрон в секунду, например менее 10 микрон в секунду, например менее 100 микрон в секунду, например менее 1 миллиметра в секунду.
Глубина поля определяется здесь как диапазон расстояний от оптики построения изображения, в которой изображение объектов, по существу, не изменяется при смещении относительно фокальной плоскости. Фокальная плоскость определяется как плоскость, где достигается максимальное разрешение изображения. Выражение «по существу, не изменяется» подразумевает, что оценочные параметры, характеризующие особенности объекта, не претерпевают существенных изменений при переносе. В одном варианте осуществления, «по существу, не изменяется» означает, что отношение FWHM (полная ширина на полумаксимуме) распределения интенсивности точечного источника при данном положении в направлении глубины поля к FWHM распределения интенсивности точечного источника в фокальной плоскости составляет менее 5, например менее 2, например менее 1,5, например менее 1,25, например менее 1,1, например менее 1,05.
В одном варианте осуществления, устройство и система, отвечающие настоящему изобретению, содержат запоминающее устройство для хранения изображений, полученных устройством получения изображения. Запоминающее устройство может содержать блок памяти энергозависимого типа, например блок оперативной памяти, или энергонезависимую память, например жесткий диск, флэш-память, CD-ROM, DVD, диск BlueRay или аналогичный носитель информации.
Изображения, записанные первым устройством получения изображения, можно анализировать с использованием устройства анализа изображения. В одном варианте осуществления, устройство анализа изображения содержит алгоритмы распознавания шаблонов. В одном варианте осуществления, эти алгоритмы распознавания шаблонов предназначены для сравнения ряда изображений, где изображены соседние части данного образца, что позволяет определить, когда частица находится в фокальной плоскости узла оптической регистрации. В одном варианте осуществления, устройство анализа изображения содержит блок идентификации края для идентификации краев объектов в изображении(ях). Эти края можно идентифицировать как переходы между более яркими и более темными областями в изображении.
В одном варианте осуществления, положение частицы в жидком образце определяется путем анализа последовательности изображений, полученных вдоль пути сканирования. Размер частицы в изображениях оценивается в каждом изображении, что позволяет построить кривую, выражающую зависимость площади частицы в изображениях от положения вдоль пути сканирования. Минимум этой кривой соответствует положению объектной плоскости, в которой частица находится в фокусе, т.е. когда частица располагается в фокальной плоскости.
В одном варианте осуществления, система и устройство, отвечающие настоящему изобретению, выполнены с возможностью обеспечения разбиения образца на оптические срезы. Может быть предусмотрен блок объединения для объединения изображений разбиения на оптические срезы в 3D реконструкцию образца. Используя изобретение, можно также обеспечить 2D представление. Может быть предусмотрен блок анализа изображения для объединения изображений из двух или более сканирований вдоль пути сканирования и/или сканирований вдоль разных осей.
В одном варианте осуществления, сохранение и/или анализ полученных изображений может осуществляться на одном или нескольких внешних блоках, и устройство и система, отвечающие настоящему изобретению, могут содержать соединительный блок для подключения к внешнему блоку. Внешний блок может представлять собой вышеописанное запоминающее устройство и/или устройство анализа изображения. В одном варианте осуществления внешнее устройство может содержать персональный компьютер, например портативный компьютер, снабженный запоминающим устройством и/или программным обеспечением для анализа изображений. В одном варианте осуществления, соединительный блок содержит последовательное соединение, например порт USB. В одном варианте осуществления, соединение содержит беспроводное соединение, например модем General Packet Radio Service (GPRS), антенну Bluetooth или антенну WiFi. Можно использовать и другие формы соединительных портов, например соединение Ethernet или параллельное соединение. Соединительный блок также может содержать интернет-соединение для сохранения изображений и других данных на удаленном запоминающем устройстве, например удаленном сервере, который собирает изображения и данные от одного или нескольких устройств. Данные можно сохранять для дальнейшего анализа или для использования в порядке ссылки.
В одном варианте осуществления, устройство содержит, по меньшей мере, один блок управления, предназначенный для управления блоком переноса и получением изображений первым устройством получения изображения. Блок управления дополнительно может содержать устройство анализа для анализа изображений, полученных устройством получения.
В одном варианте осуществления, устройство и система, описанные в данной заявке, выполнены с возможностью определения, по меньшей мере, одного параметра объема неоднородного образца, размещенного относительно устройства для образца. Параметром, в принципе, может быть любой измеримый параметр, например полное количество частиц в объеме, количество конкретных частиц в объеме, количество разных частиц в объеме, размер объема или форма объема.
Для некоторых приложений, анализ данного образца требует отсчета заранее определенного количества частиц для обеспечения достаточно низкой статистической неопределенности. Поэтому устройство и система согласно одному варианту осуществления выполнены с возможностью получения и анализа изображений, пока не будет идентифицировано заранее определенное количество частиц. Одновременно можно определять объем изображаемой и анализируемой части образца. Концентрацию частиц в образце можно определять с использованием определенного объема изображаемой и анализируемой части образца совместно с заранее определенным количеством частиц. Количество частиц в неоднородном образце также можно определять с заранее определенным качеством или определенностью, и концентрацию частиц в образце можно определять с использованием определенного объема изображаемой и анализируемой части образца. Специалисту очевидно, что пользователь может соответственно регулировать качество осуществляемого анализа, одновременно регулируя время анализа, и, таким образом, можно легко оптимизировать соотношение качества и затраченного времени в широком диапазоне качества/времени.
В ходе процедуры измерения получается ряд изображений, отстоящих друг от друга на шаг известного размера. Поэтому при получении можно вычислять эффективный объем измерения. Размер шага может быть одинаковым для всех шагов в измерении, или они могут различаться.
В одном варианте осуществления вычисление эффективного объема используется для улучшения статистики определения концентрации частиц. В ходе процедуры измерения, размеры шагов накапливаются, и полученные изображения передаются на устройство регистрации частиц, приспособленное регистрировать частицы. Регистрация частиц в изображении является достаточно простой процедурой и может осуществляться с использованием особого программного обеспечения на особом оборудовании с такой же скоростью, что и получение изображения. При обнаружении частицы в фокусе, полное количество найденных частиц увеличивается, и процедура измерения продолжается до тех пор, пока не будет найдено определенное количество частиц. Затем эффективную концентрацию можно определить как концентрация = количество частиц / накопленный объем.
В одном варианте осуществления изобретения требуется больше информации относительно частицы. Например, если нужно определить относительную концентрацию нескольких разных частиц, может потребоваться производить больше вычислений, чем может быть сделано между двумя изображениями, полученными с нормальной скоростью. Получение изображения останавливается, пока устройство регистрации частиц определяет положение частиц. После регистрации частицы активируется средство вычисления для определения фактического типа частицы. После определения типа всех частиц в изображении - или выбраковки частиц как не поддающихся определению - устройство для образца перемещается на один шаг, и получается следующее изображение. Определять измеренный объем образца не обязательно, поскольку интерес представляет только относительная концентрация.
В случае установления достаточно высокой статистической определенности для относительной концентрации частиц измерение можно остановить. Если, например, нужно установить относительную концентрацию двух разных частиц и первая частица имеет высокую концентрацию и вторая частица имеет низкую концентрацию, количество найденных частиц второго типа должно решать, достаточно ли найдено частиц. Если 1 из 10 найденных частиц относится ко второму типу, статистическая определенность низка и измерение нужно продолжать. Если 50 из 500 частиц относится ко второму типу, статистическая определенность может быть значительно выше и измерение можно остановить. Его также можно продолжать для установления еще лучшей статистики.
В одном варианте осуществления изобретения требуется информация о наличии частицы, характеризуемой конкретными параметрами. Например, при подозрении, что пациент заражен малярией, берется образец крови, и кровь проверяется на малярию. Для этого может потребоваться проверять большой образец крови по сравнению с образцами крови для определения концентрации лейкоцитов. После забора образца крови у пациента и помещения его в устройство для образца, начинается измерение. Получается изображение, и устройство анализа изображения активируется для определения присутствия паразитирующего простейшего, например Plasmodium falciparum и/или Plasmodium vivax. После исследования изображения, устройство для образца перемещается на один шаг и получается следующее изображение. Для каждого шага вычисляется накопленный объем. Эта процедура продолжается, пока либо не будет найдено, по меньшей мере, определенное количество малярийных частиц, либо не будет исследован, по меньшей мере, определенный объем.
В одном варианте осуществления, устройство анализа изображения содержит блок идентификации границ, предусмотренный для идентификации, по меньшей мере, одной границы образца в изображениях. Блок идентификации границ может быть предусмотрен для идентификации, по меньшей мере, одной границы образца в изображениях.
В одном варианте осуществления, образец размещается в устройстве для образца, содержащем, по меньшей мере, первый и второй ограничители, которые, по существу, параллельны друг другу и пути сканирования. В таком случае, блок идентификации границ может быть предусмотрен для идентификации первой границы, заданной первым ограничителем, и второй границы, заданной вторым ограничителем. Блок идентификации границ также можно предусмотреть для идентификации третьей границы, заданной третьим ограничителем, и четвертой границы, заданной четвертым ограничителем. Периметр образца в устройстве для образца в поперечном сечении, перпендикулярном пути сканирования, может определяться границами с первой по четвертую. Третий ограничитель может быть, по существу, параллелен пути сканирования и перпендикулярен первому ограничителю, и четвертый ограничитель может быть, по существу, параллелен третьему ограничителю. В одном варианте осуществления, ограничители со второго по четвертый содержат гибкую и, по меньшей мере, частично прозрачную пленку, контактирующую с образцом.
Устройство для образца может быть размещено относительно узла оптической регистрации таким образом, чтобы вектор нормали первого ограничителя и/или второго ограничителя не был параллелен оптической оси узла оптической регистрации. Поэтому углы ψ1-conf и ψ2-conf между оптической осью и нормалью первого и второго ограничителей, соответственно, больше нуля.
В одном варианте осуществления, образец размещается в устройстве для образца, содержащем опору, причем опора, предпочтительно, по существу, параллельна пути сканирования. Образец можно обеспечивать в любой форме, например в виде одной или нескольких капель жидкого образца, помещенных на опору. В таком случае, блок идентификации границ может быть предусмотрен для идентификации границ образца, помещенных на эту опору. Таким образом, первая граница может содержать границу раздела между образцом и опорой, и вторая граница может содержать границу раздела между образцом и окружающей атмосферой. В одном варианте осуществления, устройство для образца устроено таким образом, что опора располагается между устройством получения изображения образца и образцом.
Устройство для образца может быть размещено относительно узла оптической регистрации таким образом, чтобы вектор нормали к опоре не был параллелен оптической оси узла оптической регистрации. Поэтому угол ψsupport между оптической осью и нормалью к опоре больше нуля.
В одном варианте осуществления, предусматривающем определение границ образца и/или границ области получения изображения, анализируемый объем образца можно определять из измерения разнесения границ. В одном варианте осуществления, идентифицируются первая и вторая границы, и анализируемый объем неоднородного образца определяется из разнесения этих границ, а также размера области получения изображения и длины сканированного пути. В одном варианте осуществления, идентифицируются третья и четвертая границы образца, и объем определяется из разнесения первой и второй границ образца, разнесения третьей и четвертой границ и длины сканированного пути. В одном варианте осуществления, площадь поперечного сечения объема образца в поперечном сечении, перпендикулярном пути сканирования, определяется из границ, образованных ограничителями, и объем определяется из площади поперечного сечения и длины сканированного пути.
В одном варианте осуществления, анализируемая часть объема неоднородного образца определяется проекцией области получения изображения на площадь поперечного сечения и длиной сканированного пути. Возможен случай, когда область получения изображения содержит не все границы, необходимые для задания площади поперечного сечения ограничителей устройства для образца.
В одном варианте осуществления, образец размещается в устройстве для образца, содержащем многоугольный ограничитель. В таком случае, блок идентификации границ может быть предусмотрен для идентификации границы между образцом и многоугольным ограничителем. Продольная ось многоугольного ограничителя может быть, по существу, параллельна пути сканирования. Определение размера анализируемого объема образца может содержать измерение площади многоугольного ограничителя. Многоугольный ограничитель может представлять собой капиллярную трубку.
В одном варианте осуществления, образец размещается в устройстве для образца, содержащем трубчатый ограничитель, например ограничитель по существу цилиндрической формы. В таком случае, блок идентификации границ может быть предусмотрен для идентификации границы между образцом и трубчатым ограничителем. Продольная ось трубчатого ограничителя может быть, по существу, параллельна пути сканирования. Анализируемый объем образца определяется из измерения периметра трубчатого ограничителя. Трубчатый ограничитель может представлять собой капиллярную трубку.
В одном варианте осуществления, устройство и система, отвечающие настоящему изобретению, содержат блок чтения информации, обеспечиваемой путем кодирования на устройстве для образца. Кодирование может содержать выгравированную или впечатанную информацию, относящуюся к положению на устройстве для образца, позволяющую определять, где вдоль пути сканирования получается каждое из совокупности изображений. В одном варианте осуществления, положение полученного изображения вдоль пути сканирования определяется с использованием чтения из, по меньшей мере, первого блока переноса. Знание конкретного положения одного или нескольких изображений может оказаться очень полезным для пользователя и может, например, использоваться для определения движений частиц в образце. Другие варианты его использования будут ясны специалисту, например, из нижеследующего описания.
Узел оптической регистрации, отвечающий настоящему изобретению, содержит, по меньшей мере, один оптический элемент, имеющий фокальную плоскость. Оптический элемент может представлять собой линзу любого рода или линзовую систему, например объектив, например плосковыпуклую линзу, плосковогнутую линзу, вогнуто-выпуклую линзу, двояковогнутую линзу, двояковыпуклую линзу, дублет, триплет или комбинацию из 4 или более линз. Фокальная плоскость оптического элемента может совпадать с объектной плоскостью узла оптической регистрации.
В одном варианте осуществления, устройство содержит второй узел оптической регистрации. Второй узел оптической регистрации может быть аналогичен первому узлу оптической регистрации или отличаться от первого узла оптической регистрации. Область получения изображения первого узла оптической регистрации может пересекать область получения изображения второго узла оптической регистрации под углом пересечения. Угол пересечения может составлять в пределах от 0 до 180 градусов. В одном варианте осуществления, угол пересечения равен нулю, и область получения изображения первого узла оптической регистрации совпадает с областью получения изображения второго узла оптической регистрации. В одном варианте осуществления, угол пересечения равен 90°, и область получения изображения первого узла оптической регистрации перпендикулярна области получения изображения второго узла оптической регистрации.
Первый и второй узлы оптической регистрации могут отличаться, например, увеличением или площадью наблюдения. Первая и вторая области получения изображения могут отличаться, например, разные части образца могут изображаться двумя узлами оптической регистрации.
В одном варианте осуществления, путь сканирования, по существу, перпендикулярен объектной плоскости, и узел оптической регистрации может размещаться согласно принципу Шаймпфлюга.
В одном варианте осуществления, устройство содержит основание устройства для образца, и устройство для образца может располагаться относительно этого основания устройства для образца, когда изображения образца нужно получать. Основание устройства для образца может содержать крепежный механизм для прикрепления устройства для образца к основанию устройства для образца.
Основание устройства для образца может содержать, по существу, плоскую поверхность, выполненную с возможностью обеспечения основания устройства для образца, которое может контактировать с плоской поверхностью. Согласно варианту осуществления, где устройство для образца содержит первый ограничитель и/или второй ограничитель, устройство для образца может быть устроено так, что, по меньшей мере, один из этих ограничителей, по существу, параллелен плоской поверхности. Если плоская поверхность располагается таким образом, что ее нормаль образует угол ψbase относительно оптической оси узла оптической регистрации, который больше нуля, по меньшей мере, один из углов ψ1-conf и ψ2-conf между оптической осью и нормалью первого и второго ограничителей, соответственно, также больше нуля.
Углы между оптической осью и вектором нормали первого ограничителя ψ1-conf, второго ограничителя ψ2-conf и плоской поверхности могут составлять в пределах от приблизительно 0.3 до приблизительно 89.7 градусов, например в пределах от приблизительно 1 до приблизительно 89 градусов, например в пределах от приблизительно 2 до приблизительно 88 градусов, например в пределах от приблизительно 4 до приблизительно 86 градусов, например в пределах от приблизительно 5 до приблизительно 85 градусов, например в пределах от приблизительно 8 до приблизительно 82 градусов, например в пределах от приблизительно 10 до приблизительно 80 градусов, например в пределах от приблизительно 20 до приблизительно 70 градусов, например в пределах от приблизительно 25 до приблизительно 65 градусов, например в пределах от приблизительно 30 до приблизительно 60 градусов, например в пределах от приблизительно 35 до приблизительно 55 градусов, например в пределах от приблизительно 40 до приблизительно 50 градусов. В одном варианте осуществления, ψ1-conf и ψ2-conf составляют в пределах от приблизительно 20 градусов до 89.5 градусов, например в пределах от приблизительно 20 до приблизительно 85 градусов, например в пределах от приблизительно 20 до приблизительно 80 градусов, например в пределах от приблизительно 20 до приблизительно 75 градусов, например в пределах от приблизительно 20 до приблизительно 65 градусов, например в пределах от приблизительно 20 до приблизительно 55 градусов, например в пределах от приблизительно 20 до приблизительно 45 градусов.
В одном варианте осуществления, сканирование и получение изображений для получения совокупности изображений образца осуществляются так, чтобы центры изображений, полученных вдоль пути сканирования, выравнивались, по существу, вдоль монотонно изменяющейся линии, например прямой линии или линии, образующей круг, что позволяет обеспечить разбиение на оптические срезы изображаемого объема образца.
Если нужно получить несколько разбиений образца на оптические срезы, стол переноса может перемещать оптическое устройство получения и устройство для образца относительно друг друга между последовательными разбиениями на оптические срезы, т.е. сканирование и получение изображений можно осуществлять в нескольких областях образца.
В одном варианте осуществления, угол θ сравнительно велик, т.е. объектная плоскость располагается почти параллельно пути сканирования, благодаря чему площадь объектной плоскости, которая может пересекать образец, размещенный в устройстве для образца, сравнительно велика.
Угол θ, выражающий угол между путем сканирования и оптической осью узла оптической регистрации, может составлять в пределах от приблизительно 0.3 до приблизительно 89.7 градусов, например в пределах от приблизительно 1 до приблизительно 89 градусов, например в пределах от приблизительно 2 до приблизительно 88 градусов, например в пределах от приблизительно 4 до приблизительно 86 градусов, например в пределах от приблизительно 5 до приблизительно 85 градусов, например в пределах от приблизительно 8 до приблизительно 82 градусов, например в пределах от приблизительно 10 до приблизительно 80 градусов, например в пределах от приблизительно 20 до приблизительно 70 градусов, например в пределах от приблизительно 25 до приблизительно 65 градусов, например в пределах от приблизительно 30 до приблизительно 60 градусов, например в пределах от приблизительно 35 до приблизительно 55 градусов, например в пределах от приблизительно 40 до приблизительно 50 градусов. В одном варианте осуществления, θ составляет в пределах от приблизительно 20 градусов до 89.5 градусов, например в пределах от приблизительно 20 до приблизительно 85 градусов, например в пределах от приблизительно 20 до приблизительно 80 градусов, например в пределах от приблизительно 20 до приблизительно 75 градусов, например в пределах от приблизительно 20 до приблизительно 65 градусов, например в пределах от приблизительно 20 до приблизительно 55 градусов, например в пределах от приблизительно 20 до приблизительно 45 градусов или, например в пределах от приблизительно 60 градусов до 89.5 градусов, например в пределах от приблизительно 63 до приблизительно 86 градусов, например в пределах от приблизительно 66 до приблизительно 83 градусов, например в пределах от приблизительно 69 до приблизительно 80 градусов, например в пределах от приблизительно 71 до приблизительно 78 градусов, например в пределах от приблизительно 73 до приблизительно 77 градусов.
Размер областей получения изображения одинаковых узлов оптической регистрации симметричен относительно θ, равного 90 градусам, и области получения изображения получаются одинакового размера, когда θ равен α и 180-α градусам, например, когда θ равен 15 или 165 градусам.
В одном варианте осуществления, узел оптической регистрации содержит элементы формирования пучка. Это могут быть, например, апертуры, вставленные на оптическом пути для уменьшения погрешностей изображения, элементы расширения пучка и/или фокусировки пучка и/или элементы улучшения изображения. Апертуры могут иметь фиксированный размер и фиксированное положение на оптическом пути или могут представлять собой диафрагму, которая может изменяться согласно требованиям фактической установки. Если требование к измерению состоит в большой глубине поля (DOF), диафрагму нужно уменьшить, тогда как требование к увеличенному полю зрения с меньшей DOF приводит к необходимости увеличения диафрагмы. Увеличение размера диафрагмы также приводит к снижению требования к интенсивности света, пропускаемого через образец. В одном варианте осуществления, апертура располагается между элементом фокусировки пучка или расширения пучка и образцом. Апертуру можно устанавливать с возможностью фиксации и отсоединения, что позволяет заменять ее, например, апертурой, имеющей другой диаметр отверстия.
Элемент расширения пучка может быть, например, линзой или двумя или более линзами в комбинации. Узел оптической регистрации может содержать элементы улучшения изображения. Это могут быть апертуры или диафрагмы, вставленные на оптическом пути или особые оптические элементы, например призмы или клинья.
Устройство получения изображения может содержать чип ПЗС или чип КМОП или их комбинацию, если устройство содержит первое и второе устройства получения изображения. Чип ПЗС и КМОП можно использовать в бинированных установках, где заряд от соседних пикселей в ПЗС объединяется в один пиксель при считывании. Это можно использовать для сокращения объема данных в измерительных установках с низким требованием к разрешению, при поиске частиц в образце. Когда образец найден, бинирование можно изменять или заканчивать для получения более высокого разрешения. В одном варианте осуществления, устройство и система, отвечающие настоящему изобретению, содержат второе устройство получения изображения с более высоким разрешением изображения, чем у первого устройства получения изображения.
Устройство дополнительно может содержать первый блок переноса для перемещения устройства для образца и узла оптической регистрации относительно друг друга. Для этого можно перемещать устройство для образца относительно корпуса устройства, удерживая узел оптической регистрации на месте, или наоборот, перемещать узел оптической регистрации относительно корпуса устройства, удерживая устройство для образца на месте.
Движение можно осуществлять, по существу, непрерывно, и во время движения совокупность изображений можно получить с заранее определенным интервалом времени, причем заранее определенный интервал времени составляет в пределах от приблизительно 10-9 с до приблизительно 103 с, в пределах от приблизительно 10-4 с до приблизительно 10 с, или в пределах от приблизительно 10-3 с до приблизительно 1 с. С использованием этой процедуры, изображения можно получать с заранее определенным разнесением в образце и быстрее проводить измерения, что желательно в ряде случаев, например, если образец имеет короткое время жизни. В одном варианте осуществления предпочтительно как можно быстрее получать изображения, чтобы сделать мгновенный снимок образца.
Размер шага можно определять на основании информации полученной из изображения. Если, например, в изображении найдена нужная частица, следующим шагом будет перемещение образца для получения частицы в центре DOF для получения наилучшего возможного изображения. Если же в полученном изображении не частиц не обнаружено, шаг должен быть как можно длиннее, чтобы осуществлять поиск в образце за как можно меньшее число шагов. Между двумя шагами всегда должна существовать область перекрытия, гарантирующая, что все частицы, присутствующие в образце, можно обнаружить.
Размер шагов в одном варианте осуществления можно определять равными конкретному значению, которое остается постоянным в процессе измерения. Это можно использовать для получения набора изображений, которые можно объединять в 3-мерное изображение или 3-мерное измерение с использованием информации перекрытия в двух последовательных изображениях.
Иногда для 3D реконструкции частиц может требоваться, чтобы размеры шагов составляли долю DOF.
В одном варианте осуществления, глубина поля (DOF), по меньшей мере, одного оптического элемента больше или равна длине шага блока переноса.
Ограничитель в направлении оси X задает верхний предел для количества шагов и, таким образом, количества разных изображений, которые можно получить. Поэтому предпочтительно, чтобы размер образца в направлении оси X был достаточно велик, чтобы содержать нужное количество шагов в этом направлении.
В одном варианте осуществления, движение может происходить, по существу, одинаковыми шагами перемещения с заранее определенной длиной шага. Между двумя последовательными шагами перемещения можно получить изображение. С использованием этой процедуры, изображения можно получить с заранее определенным разнесением в образце. Кроме того, образец может быть, по существу, в состоянии покоя при осуществлении получения изображения. Это может давать более качественные изображения с более высоким разрешением, чем в случае перемещения образца при получении изображения.
Заранее определенная длина шага может составлять в пределах от приблизительно 0,05 мкм до приблизительно 1000 мкм. Шаги размером до приблизительно 1000 мкм можно использовать в измерениях, где образец сканируется для поиска частиц. Длина шага может быть даже больше DOF, поскольку частицу можно зарегистрировать, даже если она находится вне области DOF, поскольку она будет изображаться с искажением. В случае регистрации частицы вне области DOF, длину шага можно изменить для перемещения образца таким образом, чтобы частица оказалась в области получения изображения.
Заранее определенная длина шага может, например, быть в пределах от приблизительно 5 мкм до приблизительно 10 мкм. Оптическая система регистрации может, например, иметь DOF в пределах от приблизительно 5 мкм до приблизительно 10 мкм, и в одном варианте осуществления изобретения предпочтительно, чтобы размер шага был меньше, чем DOF, чтобы гарантировать, что все частицы изображаются без искажений.
Поэтому, в одном варианте осуществления, заранее определенная длина шага может быть меньше DOF, например в пределах от приблизительно 0,05 мкм до приблизительно 5 мкм. Это предпочтительно для получения изображений, используемых для получения информации для определения параметров отдельных частиц, например типа лейкоцита. DOF, по меньшей мере, одного оптического элемента, в одном варианте осуществления, может быть больше или равна длине шага блока переноса, что позволяет более надежно сшивать полученные изображения.
Заранее определенная длина шага может быть даже существенно меньше чем DOF, например в пределах от 1/5 DOF до 1/100 DOF. Это предпочтительно для получения изображений, используемых до 3D реконструкции частицы в образце.
Заранее определенная длина шага может составлять приблизительно 10 микрон, приблизительно 5 микрон, приблизительно 1 микрона, приблизительно 0.1 микрона.
Устройство может содержать второй блок переноса для перемещения устройства для образца и узла оптической регистрации относительно друг друга. Направление движения второго блока переноса может существенно отличаться от направления движения первого блока переноса, и направление движения второго блока переноса может быть, по существу, перпендикулярным направлению движения первого блока переноса.
В одном варианте осуществления первый блок переноса может перемещать устройство для образца и, по меньшей мере, первый узел оптической регистрации относительно друг друга в, по существу, вращательном режиме. Вращательное движение, в одном варианте осуществления, может осуществляться, по существу, одинаковыми шагами с заранее определенным угловым шагом. Между двумя последовательными шагами можно получить изображение. Заранее определенный угловой шаг может составлять в пределах от приблизительно 0.01 градуса до приблизительно 1 градуса, в пределах от приблизительно 0,1 градуса до приблизительно 0,5 градуса. Заранее определенная длина шага может составлять 0,01 градуса, 0,02 градуса, 0,05 градуса или 0,1 градуса.
Второй блок переноса может обеспечивать радиальный перенос объектной плоскости к центру вращения вращательного движения, обеспеченного первым блоком переноса. Объединенные движения первого и второго столов переноса, в принципе, могут напоминать движение светового пучка по CD в проигрывателе CD.
В одном варианте осуществления, устройство и система, отвечающие настоящему изобретению, содержат устройство освещения изображения для облучения образца. В принципе, это устройство освещения изображения может быть любым источником электромагнитного излучения, и длина волны излучения может составлять в пределах от приблизительно 0.01 нм до приблизительно 15 км, в пределах от приблизительно 200 нм до приблизительно 1100 нм, в пределах от приблизительно 300 нм до приблизительно 800 нм, в пределах от приблизительно 400 нм до приблизительно 700 нм, в пределах от приблизительно 450 нм до приблизительно 600 нм, в пределах от приблизительно 495 нм до приблизительно 570 нм. Устройство освещения изображения может содержать источник света, выбранный из группы, содержащей лазер, лазерный диод, СИД, электролампу, супернепрерывный источник или источник белого света.
В одном варианте осуществления, электромагнитное излучение, регистрируемое устройством получения изображения, содержит свет, излучаемый в результате процесса хемилюминесценции.
В одном варианте осуществления, блок анализа изображения выполнен с возможностью идентификации неоднородностей в неоднородном образце. Эти неоднородности могут содержать частицы, например частицы биологического или небиологического происхождения. Частицы биологического происхождения могут быть эмбрионами, бактериями, паразитами, грибами или клетками. Клетки могут представлять собой клетки крови, например лейкоциты и эритроциты, соматические клетки, дрожжевые клетки, ооциты, бластоциты, зиготы и тромбоциты. Частицы также могут иметь небиологическое происхождение, например металлические осколки, капли воды в масле, пигменты в краске и загрязнение в воде.
В одном варианте осуществления, устройство и система, отвечающие настоящему изобретению, выполнены с возможностью определения качественных параметров лейкоцитов в образце и/или определения количественных параметров лейкоцитов в образце.
В одном варианте осуществления определяется количество эритроцитов в образце, которые заражены паразитирующими простейшими, например Plasmodium falciparum и Plasmodium vivax. Это можно делать для определения, заражен ли пациент, например, малярией.
В одном варианте осуществления, устройство и система, отвечающие настоящему изобретению, выполнены с возможностью оценивания физического состояния ракового пациента и готовности пациента к химиотерапевтическому лечению.
В одном варианте осуществления, устройство и система, отвечающие настоящему изобретению, выполнены с возможностью регистрации частиц небиологического происхождения, например металлических осколков, капель воды в масле, пигментов в краске и загрязнений в воде.
Система и устройство могут содержать корпус. Корпус может, например, быть изготовлен частично или полностью из непрозрачного материала во избежание выхода всего или части света, например, с выбранными длинами волны из образца и устройства оптической регистрации.
В одном варианте осуществления, устройство и система, отвечающие настоящему изобретению, содержат контур обратной связи, например, для повторного осуществления последовательности, содержащей: a) получение изображения; b) анализ изображения и c) регулировку относительного положения устройства для образца и узла оптической регистрации. Контур обратной связи может быть выполнен с возможностью отслеживания частицы в образце.
В одном варианте осуществления, устройство и система, отвечающие настоящему изобретению, дополнительно содержат дополнительный блок подготовки образца для подготовки образца.
Система и устройство могут быть выполнены как портативное устройство, дополнительно содержащее источник питания, например аккумуляторную батарею.
В одном варианте осуществления устройство, отвечающее настоящему изобретению, выполнено с возможностью определения значения, по меньшей мере, одного параметра, описывающего микробную активность отдельных биологических организмов в жидком образце. В таком варианте осуществления, устройство получения изображения выполнено с возможностью получения изображений, в которых идентифицировать отдельные биологические организмы можно, и блок управления выполнен с возможностью управления узлом оптической регистрации и блоком переноса для получения изображений для формирования, по меньшей мере, первого разбиения на оптические срезы биологических организмов в жидком образце. Жидкий образец размещается в устройстве для образца, содержащем, по меньшей мере, один контейнер для образца для удержания образца в жидком виде. Устройство анализа изображения выполнено с возможностью анализировать первое разбиение на оптические срезы, устройство анализа изображения содержит алгоритмы, призванные определять значение, по меньшей мере, одного параметра, описывающего микробную активность отдельных биологических организмов, в каждом контейнере для образца. Блок управления выполнен с возможностью последовательного получения разбиений на оптические срезы из образца, например первого разбиения на оптические срезы и, по меньшей мере, второго разбиения на оптические срезы. Параметром, описывающим микробную активность, в принципе, может быть любой измеримый параметр, например, но без ограничения, скорость деления клеток, жизнеспособность клеток, отношение живых к мертвым, броуновское движение, уровень метаболизма, морфология, фактор роста, кинетика или фокусирующее поведение. Параметр можно рассматривать как единичное значение, комбинацию нескольких значений или даже комбинацию нескольких параметров. Термин “биологические организмы” может означать как одиночный биологический организм, так и совокупность биологических организмов, например малые или большие группы биологических организмов. Микробная активность может означать активность, связанную с делением клеток, движением клеток, изменениями в среде, обусловленными метаболизмом, смертью клеток и т.д., создающую изменения в популяции микроорганизмов, изменения размера отдельных организмов или кластеров организмов или изменения положения или движения организмов. Таким образом, термин «микробная активность» следует понимать в очень широком контексте как любое изменение, регистрируемое для единичного микроорганизма, или в малых группах, или в популяции микроорганизмов. Количество контейнеров для образца в устройстве для образца может изменяться в зависимости от применения. Устройство для образца, содержащее только один контейнер для образца, можно, например, использовать, согласно варианту осуществления, для мониторинга одного единственного биологического организма. Устройство для образца, содержащее несколько контейнеров для образца, например 20 контейнеров, можно использовать для тестирования на восприимчивость. Количество контейнеров для образца Ncont в устройстве для образца может быть равно 2, 3, 4, 5, 6, 8, 9, 10, 12, 14, 15, 16, 18, 20, 21, 22, 24, 25, 26, 27, 28, 30, или более 30. В одном варианте осуществления, Ncont контейнеров для образца размещены в один или несколько рядов, например, с одинаковым количеством контейнеров для образца в каждом ряду. Контейнер для образца может содержать впускное отверстие, используемое для ввода жидкости в контейнер для образца, и может содержать выпускное отверстие, используемое для вентиляции избыточной жидкости или воздуха при впуске жидкости. Выпускное отверстие также можно использовать для изъятия образца, если устройство для образца нужно повторно использовать для новой порции жидкого образца.
Контейнер для образца может иметь открытый ограничитель, т.е. может быть открыт в, по меньшей мере, одном направлении, в каковом случае контейнер можно рассматривать как контейнер колодезного типа, или контейнер для образца может иметь, по существу, замкнутый ограничитель, т.е. может быть, по существу, закрыт во всех направлениях, кроме необязательных впускного и выпускного отверстий, в каковом случае его можно рассматривать как контейнер кюветного типа. Образец может пребывать в жидком виде в ходе получения разбиения на оптические срезы.
Считается, что образец находится в жидком виде, если образец может течь под действием силы тяжести в контейнер для образца или втягиваться в контейнер для образца под действием капиллярных сил. Жидкий образец может вести себя как гель. В контексте настоящего изобретения, гелем считается сплошной желеобразный материал, свойства которого могут варьироваться от мягкого и водянистого до жесткого и густого. Гели, по существу, не текут, будучи в стационарном состоянии. На вес, гели являются, в основном, жидкостями, хотя ведут себя как твердые тела.
При наличии разбиения образца на оптические срезы, соответствующие объекты биологических организмов, будь то клетки, бактерии или другие объекты, представляющие интерес, можно извлекать для дальнейшего анализа, применяя первый алгоритм содержащий:
1. Применение функции решения к каждому пикселю в разбиении на оптические срезы, классифицирующей пиксель как пиксель объекта или как пиксель фона. Функция решения может, например, базироваться на локальной контрастности вокруг данного пикселя.
2. Объединение пикселей объекта из каждого изображения разбиения на оптические срезы для формирования фокальных стопок отдельного объекта. Фокальная стопка объекта состоит из одного или нескольких изображений объекта, изображенного в разных фокальных плоскостях. Следует проявлять осторожность при построении фокальных стопок объекта, если разбиение на оптические срезы получается с использованием наклонной оптической системы.
3. Для каждой фокальной стопки объекта точку оптимального фокуса можно определять с использованием фокальной функции, применяемой к каждому изображению в фокальной стопке объекта. В одном варианте осуществления, где данные объекты являются амплитудными объектами, в качестве фокальной функции можно использовать дисперсию интенсивностей пикселей. В изображении с максимальной дисперсией считается, что объект находится в фокусе. Это изображение можно извлекать для дальнейшего анализа.
В одном варианте осуществления изобретения устройство анализа изображения содержит алгоритмы, позволяющие определять скорость деления клеток. При наличии набора разбиений образца на оптические срезы с эквидистантными или неэквидистантными интервалами времени скорость деления клеток вычисляется путем извлечения соответствующих клеток с использованием первого алгоритма. Для каждого извлеченного объекта можно вычислить параметр, относящийся к клетке. Это, например, может быть количество субкомпонентов, площадь объекта, периметр объекта, размер двоичного скелета и т.д. Можно вычислить среднее значение значения параметра для всех объектов в разбиении на оптические срезы. Это повторяется для всех разбиений данного образца на оптические срезы. Наблюдая, как изменяются со временем средние значения, можно установить скорость деления клеток. Можно рассматривать и другие статистические меры помимо среднего значений параметра, например медиану, дисперсию или другие, более высокого порядка и/или нелинейные статистические меры.
В одном варианте осуществления устройство анализа изображения содержит алгоритмы, позволяющие определять жизнеспособность клеток. В случае единичного разбиения образца на оптические срезы степень жизнеспособности клеток можно установить, применяя сначала вышеупомянутый способ для извлечения соответствующих фокальных стопок объекта. Для каждого объекта жизнеспособность можно вычислить на основании таких параметров, как поведение фокальной функции, профиль интенсивности объекта в фокусе, общая контрастность объекта, реакция на некоторое биологическое окрашивание и т.д. Применяя это для всех зарегистрированных объектов в стопке, статистические меры, например среднее, можно использовать для определения общей жизнеспособности клеток в образце.
В одном варианте осуществления устройство анализа изображения содержит алгоритмы, позволяющие определять отношение живых к мертвым. При наличии набора разбиений образца на оптические срезы с эквидистантными или неэквидистантными интервалами времени отношение живых к мертвым вычисляется путем извлечения соответствующих клеток с использованием первого алгоритма. Для каждого извлеченного объекта можно вычислить параметр, относящийся к свойствам живые/мертвые. Это, например, может быть поведение фокальной функции, профиль интенсивности объекта в фокусе, общая контрастность объекта, реакция на некоторое биологическое окрашивание и т.д. Можно вычислить среднее значение значения параметра для всех объектов в разбиении на оптические срезы. Это повторяется для всех разбиений данного образца на оптические срезы. Наблюдая, как изменяются со временем средние значения, можно установить отношение живых к мертвым. Можно рассматривать и другие статистические меры помимо среднего значений параметра, например медиану, дисперсию или другие, более высокого порядка и/или нелинейные статистические меры.
В одном варианте осуществления устройство анализа изображения содержит алгоритмы, позволяющие определять броуновское движение, которое определяется вычислением. В случае единичного разбиения образца на оптические срезы степень броуновского движения можно установить, применяя сначала вышеупомянутый способ для извлечения соответствующих фокальных стопок объекта. Для каждой фокальной стопки объекта степень движения можно вычислять, рассматривая движение центроида объекта в разных фокальных плоскостях. Применяя это для всех зарегистрированных объектов в стопке, статистические меры можно использовать для определения, является ли движение броуновским или существует ли, например, желательное направление потока объектов в образце.
В одном варианте осуществления устройство анализа изображения содержит алгоритмы, позволяющие определять морфологические параметры. В случае единичного разбиения образца на оптические срезы, морфологические параметры объекта в образце можно установить, применяя сначала вышеупомянутый способ для извлечения соответствующих объектов в фокусе. Для каждого объекта в фокусе можно определять различные морфологические параметры, например количество субкомпонентов, форм-фактор, периметр объекта, круглость, гранулярность, круговую дисперсию и т.д. Применяя это для всех зарегистрированных объектов в разбиении на оптические срезы, статистические меры можно использовать для вычисления общих морфологических параметров объектов в образце.
В одном варианте осуществления устройство анализа изображения содержит алгоритмы, позволяющие определять морфологические изменения с течением времени. При наличии набора разбиений образца на оптические срезы с эквидистантными или неэквидистантными интервалами времени, скорость деления клеток вычисляется путем извлечения соответствующих клеток с использованием первого алгоритма. Для каждого извлеченного объекта можно вычислить параметр, относящийся к клетке. Это, например, может быть количество субкомпонентов, форм-фактор, периметр объекта, круглость, гранулярность, круговая дисперсия и т.д. Можно вычислить среднее значение значения параметра для всех объектов в разбиении на оптические срезы. Это повторяется для всех разбиений данного образца на оптические срезы. Наблюдая, как изменяются со временем средние значения, можно установить морфологические изменения с течением времени. Можно рассматривать и другие статистические меры помимо среднего значения параметра, например медиану, дисперсию или другие, более высокого порядка и/или нелинейные статистические меры.
В одном варианте осуществления определяется фактор роста биологических организмов. Фактор роста можно определять, например, для извлечения информации о том, какое влияние на рост биологических организмов оказывают условия роста, например среда образца и/или введение одного или нескольких агентов, взаимодействующих с биологическими организмами. В одном варианте осуществления устройство анализа изображения содержит алгоритмы, позволяющие определять фактор роста. При наличии набора разбиений образца на оптические срезы с эквидистантными или неэквидистантными интервалами времени, можно вычислить скорость деления клеток путем извлечения соответствующих клеток с использованием первого алгоритма. Для каждого извлеченного объекта можно вычислить параметр, относящийся к клетке. Это, например, может быть количество субкомпонентов, площадь объекта, периметр объекта, размер двоичного скелета, характеристики формы и т.д. Можно вычислить среднее значение значения параметра для всех объектов в разбиении на оптические срезы. Это повторяется для всех разбиений данного образца на оптические срезы. Наблюдая, как изменяются со временем средние значения, можно установить кривую роста. Можно рассматривать и другие статистические меры помимо среднего значения параметра, например медиану, дисперсию или другие, более высокого порядка и/или нелинейные статистические меры.
В одном варианте осуществления устройство анализа изображения содержит алгоритмы, позволяющие определять кинетику. В случае единичного разбиения образца на оптические срезы, кинетику объекта в образце можно установить, применяя сначала вышеупомянутый способ для извлечения соответствующих фокальных стопок объекта. Для каждой фокальной стопки объекта степень движения можно вычислить путем отслеживания движения центроида объекта в разных фокальных плоскостях. Это можно делать, применяя простую корреляцию с 2D изображением. Затем можно извлекать различные кинетические параметры, направление движения, скорость и т.д. Применяя это для всех зарегистрированных объектов в разбиении на оптические срезы, статистические меры можно использовать для расчета общих кинетических свойств объектов в образце.
В одном варианте осуществления устройство анализа изображения содержит алгоритмы, позволяющие определять фокусирующее поведение. В случае единичной стопки изображений объекта фокусирующее поведение можно анализировать на основании фокальной функции. Можно определять различные меры, например модальность фокальной кривой позволяет выявлять оптические свойства, например, является ли объект амплитудным или фазовым объектом. Можно применять и другие меры, например ширину фокальной кривой.
Способ, отвечающий настоящему изобретению, можно применять для определения микробной активности в жидком образце, последовательно получая совокупность разбиений на оптические срезы жидкого образца и выбирая первое и второе разбиение на оптические срезы из совокупности разбиений. Затем вычисляется значение, по меньшей мере, одного параметра для каждого разбиения на оптические срезы, и производится определение, произошло ли изменение значения, по меньшей мере, одного параметра между получением двух разбиений на оптические срезы. Способ дополнительно содержит определение микробной активности в жидком образце из изменений значения, по меньшей мере, одного параметра. Способ, отвечающий настоящему изобретению, можно применять для определения микробной активности в жидком образце, получая, по меньшей мере, одно разбиение на оптические срезы жидкого образца и выбирая первое разбиение на оптические срезы из, по меньшей мере, одного разбиения на оптические срезы. Значение, по меньшей мере, одного параметра вычисляется для первого разбиения на оптические срезы и определения микробной активности в жидком образце из значения, по меньшей мере, одного параметра.
В одном варианте осуществления изобретения, к жидкому образцу применяется внешняя стимуляция. Стимулирующее устройство способно обеспечивать стимуляцию жидкого образца в устройстве для образца, например жидкого образца в контейнере для образца. Стимуляцией может быть, например, воздействие на образец электромагнитным полем, воздействие на образец магнитным или электрическим полем или воздействие на образец акустической волной. В одном варианте осуществления, микроскопические биологические организмы можно изображать в ходе стимуляции для определения конкретного поведения организмов, что позволяет идентифицировать разновидности и природу организмов. Стимулирующее устройство может действовать под управлением блока управления, чтобы стимулировать контейнер для образца в ходе получения изображения, или может стимулировать контейнер для образца в течение более долгого периода для привнесения более устойчивых изменений в поведение организмов.
В одном варианте осуществления настоящего изобретения, устройство дополнительно содержит устройство управления средой жидкого образца. Устройство управления средой жидкого образца может быть выполнено с возможностью управления физической средой биологических организмов в жидком образце, например температурой жидкого образца. Устройство управления средой жидкого образца также может быть выполнено с возможностью управления химической средой жидкого образца, например значением pH, уровнем питания, парциальным давлением газов, например кислорода, азота и диоксида углерода, соленостью, уровнем ионов щелочных металлом, например Li+, Na+ и Ka+, уровнем ионов щелочноземельных металлов, например Mg2+ и Ca2+.
Микробная активность содержит микробную восприимчивость биологических организмов к антибиотическому агенту.
В одном варианте осуществления настоящего изобретения, по меньшей мере, одно устройство для образца инокулируется, по меньшей мере, первым агентом, например, по меньшей мере, один контейнер для образца инокулируется, по меньшей мере, первым агентом. Инокуляцию можно производить до того, как жидкий образец будет введен в контейнер для образца или устройство для образца, или ее можно добавлять после введения жидкого образца в контейнер для образца или устройство для образца, т.е. когда жидкий образец находится в контейнере для образца или устройстве для образца. Агентом может служить антибиотический агент, призванный уничтожать биологические организмы в контейнере, или агент питания, призванный способствовать росту биологических организмов. Агентом может дополнительно быть моющее средство, предназначенное для уничтожения биологических организмов.
В одном варианте осуществления, по меньшей мере, часть контейнеров для образца инокулируется Nagent различными агентами, где Nagent может быть равно 2, 3, 4, 5, 6, 8, 10, 20 или более 20. Специалисту очевидно, что количество различных агентов может зависеть от текущей задачи измерения. Если, например, нужно определить восприимчивость бактерий к различным видам бактерий, может понадобиться тестирование с использованием большого количества агентов. В ряде случаев количество возможных бактерий может быть ограниченным, и количество различных агентов также может быть ограниченным. В одном варианте осуществления, контейнеры для образца делятся на группы контейнеров для образца, где контейнеры для образца каждой группы инокулируются одним и тем же агентом, и контейнеры для образца разных групп инокулируются различными агентами, например, первая группа контейнеров для образца инокулируется первым агентом, вторая группа контейнеров для образца инокулируется вторым агентом, третья группа контейнеров для образца инокулируется третьим агентом, четвертая группа контейнеров для образца инокулируется четвертым агентом.
Контейнер для образца или устройство для образца также можно подготавливать для проверки, например, восприимчивости одного биологического организма к нескольким агентам, например комбинации агентов. В одном варианте осуществления, по меньшей мере, один контейнер для образца инокулируется несколькими различными агентами.
В одном варианте осуществления, по меньшей мере, один контейнер для образца, по существу, не содержит агентов. По существу, это означает, что количество агента, присутствующее в контейнере, должно быть меньше, чем количество агента, необходимое для оказания влияния на организмы в контейнере.
В одном варианте осуществления, первый агент инокулируется в разных концентрациях в, по меньшей мере, два разных контейнера для образца. При определении минимальной ингибирующей концентрации (MIT), которая указывает концентрацию антибиотика, необходимую для угнетения роста микроорганизмов, выгодно одновременно использовать несколько разных концентраций в разных контейнерах. Это ускоряет измерения, и измерения можно сравнивать с теми, которые можно получить с использованием тех же условий и среды. В ряде случаев может оказаться предпочтительным использовать, по меньшей мере, 5 или 10 разных концентраций агентов при определении MIT. В других случаях предпочтительно использовать другое количество разных концентраций агентов, например менее 5 концентраций или свыше 10 концентраций.
В одном варианте осуществления блок управления выполнен с возможностью получения разбиения на оптические срезы из, по меньшей мере, одного устройства для образца или контейнера в течение периода времени. Разбиение на оптические срезы содержит, по меньшей мере, одно изображение и, во многих случаях, несколько изображений. Для некоторых приложений и биологических организмов, период времени, используемый для получения разбиения(ий) на оптические срезы, может быть сравнительно долгим, например несколько дней или несколько часов. Для других приложений и биологических организмов период для получения разбиения на оптические срезы может быть заметно короче. В одном варианте осуществления, период времени составляет менее чем приблизительно 144 часов, например менее чем приблизительно 72 часов, например менее чем приблизительно 48 часов, например менее чем приблизительно 36 часов, например менее чем приблизительно 24 часов, например менее чем приблизительно 18 часов, например менее чем приблизительно 12 часов, например менее чем приблизительно 8 часов, например менее чем приблизительно 5 часов, например менее чем приблизительно 4 часов, например менее чем приблизительно 3 часов, например менее чем приблизительно 2 часов, например менее чем приблизительно 1,5 часов, например менее чем приблизительно 1 часов, например менее чем приблизительно 2700 секунд, например менее чем приблизительно 1800 секунд, например менее чем приблизительно 900 секунд, например менее чем приблизительно 600 секунд, например менее чем приблизительно 480 секунд, например менее чем приблизительно 300 секунд, например менее чем приблизительно 120 секунд, приблизительно 60 секунд, например менее чем приблизительно 10 секунд, например менее чем приблизительно 5 секунд, например менее чем приблизительно 2 секунды, например менее чем приблизительно 1 секунда. Специалисту очевидно, что упомянутые периоды приведены в порядке примера и что период может изменяться в зависимости от проводимого измерения, и период может изменяться в ходе измерения в зависимости от значения параметра, определяемого в ходе измерения, например изменяться индивидуально для разных контейнеров для образца.
Устройство и способ, отвечающие настоящему изобретению, можно использовать для определения микробной активности биологических организмов, находящихся в совокупности контейнеров для образца. Блок управления может быть выполнен с возможностью последовательного получения разбиений на оптические срезы из, по меньшей мере, двух разных контейнеров для образца. В одном варианте осуществления, разбиения на оптические срезы получаются из, по меньшей мере, двух разных контейнеров для образца с первым интервалом времени между получением двух последовательных разбиений на оптические срезы. Первый интервал может составлять менее чем приблизительно 1800 секунд, например менее 900 секунд, например менее 600 секунд, например менее 300 секунд, например менее 120 секунд, например менее 60 секунд, например менее 30 секунд, например менее 10 секунд, например менее 5 секунд, например менее 2 секунд, например менее 1 секунды, например менее 0,5 секунды, например менее 0,2 секунды, например менее 0,1 секунды, например менее 0,01 секунды, например менее 0,001 секунды.
Устройство и способ, отвечающие настоящему изобретению, позволяют определять микробную активность одного или нескольких биологических организмов, находящихся в контейнерах для образца, из совокупности разбиений на оптические срезы. Блок управления может быть выполнен с возможностью последовательного получения разбиений на оптические срезы. В одном варианте осуществления, разбиения на оптические срезы последовательно получаются из контейнера для образца со вторым интервалом времени между двумя последовательными разбиениями на оптические срезы из контейнера для образца. Интервал может изменяться в зависимости от проводимого измерения. Второй интервал времени может составлять менее чем приблизительно 3600 секунд, например менее 1800 секунд, например менее 900 секунд, например менее 600 секунд, например менее 300 секунд, например менее 120 секунд, например менее 60 секунд, например менее 30 секунд, например менее 10 секунд, например менее 5 секунд, например менее 2 секунд, например менее 1 секунды, например менее 0.5 секунды, например менее 0,2 секунды, например менее 0,1 секунды, например менее 0,01 секунды, например менее 0,001 секунды. В случае высокой микробной активности образца, может быть выгодно использовать короткий интервал, тогда как при низкой микробной активности может потребоваться более длительный интервал, чтобы не потерять важную информацию. Интервал может изменяться в ходе измерения в зависимости от определяемого значения параметра, например изменяться индивидуально для разных контейнеров для образца.
В одном варианте осуществления, блок управления выполнен с возможностью останавливать получение изображения, когда значение параметра удовлетворяет заранее определенному условию. Заранее определенное условие может относиться к определению восприимчивости биологических организмов к антибиотику или может относиться к определению минимальной ингибирующей концентрации (MIT).
Краткое содержание чертежей
Варианты осуществления изобретения будут описаны ниже более подробно в порядке примера со ссылкой на прилагаемые чертежи, на которых
фиг. 1 - схематический вид в перспективе измерительного устройства согласно одному варианту осуществления настоящего изобретения,
фиг. 2 - схематический вид в перспективе образца в устройстве для образца с одной опорой,
фиг. 3 - схематический вид сбоку измерительного устройства согласно одному варианту осуществления изобретения,
фиг. 4 - схематический вид сбоку измерительного устройства согласно одному варианту осуществления изобретения, используемого для 3D измерения частиц в образце,
фиг. 5 - схематический вид сбоку измерительного устройства согласно одному варианту осуществления изобретения, используемого для 3D измерения частиц в образце,
фиг. 6 - схематический вид корреляции между глубиной поля и размером шага переноса устройства для образца,
фиг. 7 - схематический вид сбоку элемента улучшения изображения, который можно использовать в связи с одним вариантом осуществления настоящего изобретения,
фиг. 8 - схематический вид сбоку измерительного устройства согласно одному варианту осуществления изобретения, в котором оптическое увеличение двух линзовых систем отличается,
фиг. 9 - схематический вид корреляции между размером шага и наилучшим фокусом частицы,
фиг. 10 - схематический вид сбоку измерительного устройства согласно одному варианту осуществления изобретения, в котором оптическое увеличение двух линзовых систем отличается, и
фиг. 11 - схемы, демонстрирующие корреляцию между глубиной поля и размером диафрагмы, установленной на оптической оси.
Фигуры являются схематичными и могут быть упрощены для ясности. На всех фигурах одинаковые условные обозначения используются для идентичных или соответствующих деталей.
Дополнительно, область применения настоящего изобретения явствует из нижеприведенного подробного описания. Однако следует понимать, что подробное описание и конкретные примеры, хотя и относятся к предпочтительным вариантам осуществления изобретения, приведены исключительно в порядке иллюстрации, поскольку специалисты в данной области техники, на основании этого подробного описания, могут предложить различные изменения и модификации в рамках сущности и объема изобретения.
Изобретение задается признаками независимого(ых) пункта(ов). Предпочтительные варианты осуществления заданы в зависимых пунктах. Условные обозначения, приведенные в формуле изобретения, не призваны ограничивать ее объем.
Некоторые варианты осуществления были описаны выше, но следует понимать, что изобретение не ограничивается ими, но допускает другие реализации в пределах объема, заданного в нижеприведенной формуле изобретения.
На фиг. 1 описан один вариант осуществления настоящего изобретения. Показано устройство 18 для образца, содержащее образец 12. Относительно системы координат 22, устройство 18 для образца имеет первый ограничитель 26 и второй ограничитель 28, ограничивающие образец 12 в направлении оси Z. Устройство 18 для образца может выходить за пределы области 10 получения изображения в направлении оси X, а также в направлении оси Y. В особенности, в направлении оси X предпочтительно, чтобы устройство 18 для образца выходило за пределы первоначальной области 10 получения изображения. Однако предпочтительно, чтобы образец 12 был ограничен во всех трех измерениях, чтобы быть уверенным, что образец 12 находится в неподвижном состоянии или стационарном состоянии при осуществлении измерений.
Устройство 24 освещения изображения освещает образец 12 в устройстве 18 для образца. Первый ограничитель 26 и второй ограничитель 28 выполнены из материала, прозрачного для электромагнитных волн, излучаемых осветительным устройством 24.
Узел оптической регистрации 15 содержит устройство 16 получения изображения и объектив 14. Объектив 14 содержит первую оптическую ось 13 и объектную плоскость 17, перпендикулярную первой оптической оси 13. Область 10 получения изображения образца 12 должна совпадать с объектной плоскостью 17 объектива 14. Это позволяет получать 2-мерное изображение или 2-мерное измерение области 10 получения изображения образца 12 с помощью устройства 16 получения изображения.
Предпочтительно, чтобы область 10 получения изображения пересекала первый ограничитель 26, а также второй ограничитель 28, чтобы первый ограничитель 26 и второй ограничитель 28 изображались устройством 16 получения изображения и, таким образом, содержались в изображениях.
Устройство 18 для образца может перемещаться относительно узла оптической регистрации 15 с использованием стола переноса 20, обозначенного на фигуре стрелкой. Устройство 18 для образца может перемещаться в направлении оси X шагами, и для каждого шага изображение из устройства 16 получения изображения захватывается и сохраняется в устройстве хранения изображений для дальнейшего использования. Движение в направлении оси X пересекает первую оптическую ось 13.
Размер шага движения в направлении оси X задается с использованием глубины поля (DOF) объектива 14 - см. фиг. 6. Глубина поля - это часть сцены, которая выглядит резкой в изображении. Предпочтительно, чтобы размер шага был меньше, чем DOF. Это гарантирует, что два последовательных изображения, захваченные устройством 16 получения изображения, имеют перекрывающуюся часть 50. Перекрывающаяся часть 50 может отличаться от шага к шагу. На фиг. 6 изображение № 1 получается из первого положения устройства для образца. Затем совершается шаг A, и получается изображение № 2. Размер области перекрытия изображается затененной областью 50A. Затем совершается шаг B меньшего размера, и получается изображение № 3. Размер области перекрытия изображается затененной областью 50B. Область 50A меньше, чем область 50B, поскольку шаг B меньше, чем шаг A. Затем совершается новый шаг C, и получается изображение № 4. Шаг C больше двух предыдущих шагов, и область перекрытия 50C меньше, чем предыдущих.
В одном варианте осуществления изобретения стол переноса для перемещения устройства 18 для образца в направлении оси Y используется для увеличения объема измерения. Поэтому предпочтительно, чтобы размер образца в направлении оси Y был достаточно велик, чтобы содержать нужное количество шагов в этом направлении.
Область 10 получения изображения может выходить за пределы устройства 18 для образца или, по меньшей мере, выходить за пределы первого ограничителя 26 и второго ограничителя 28 устройства 18 для образца. Полученные изображения могут содержать изображение двух ограничителей, и эту информацию можно использовать для определения высоты области 10 получения изображения и, следовательно, расстояния между двумя ограничителями.
Калибровка устройства, отвечающего изобретению, позволяет установить ширину области 10 получения изображения в направлении оси Y, и объединение ширины и высоты области 10 получения изображения дает “истинную” область получения изображения.
Предпочтительный вариант осуществления устройства 18 для образца будет подробно описан со ссылкой на фиг. 3. Устройство 18 для образца содержит образец 12. Относительно системы координат 22, устройство 18 для образца имеет первый ограничитель 26 и второй ограничитель 28, ограничивающие образец 12 в направлении оси Z. Устройство 18 для образца может выходить за пределы области 10 получения изображения в направлении оси X, а также в направлении оси Y, или устройство 18 для образца может быть меньше области 10 получения изображения.
Угол θ 35 определяется как угол между первой оптической осью 13 и осью сканирования X, заданной системой координат 22. В одном варианте осуществления, угол θ составляет в пределах от 5 до 85 градусов.
В одном варианте осуществления предпочтительно, чтобы область 10 получения изображения пересекала первый ограничитель 26, а также второй ограничитель 28, чтобы первый ограничитель 26 и второй ограничитель изображались устройством 16 получения изображения и, таким образом, содержались в изображениях. В особенности, в направлении оси X предпочтительно, чтобы устройство 18 для образца выходило за пределы первоначальной области 10 получения изображения. Однако в одном варианте осуществления предпочтительно, чтобы образец 12 был ограничен во всех трех измерениях, чтобы быть уверенным, что образец 12 находится в неподвижном состоянии или стационарном состоянии при осуществлении измерений.
Ограничитель в направлении оси X задает верхний предел для количества шагов и, таким образом, количества разных изображений, которые можно получить. Поэтому предпочтительно, чтобы размер образца в направлении оси X был достаточно велик, чтобы содержать нужное количество шагов в этом направлении.
В одном варианте осуществления изобретения стол переноса для перемещения устройства 18 для образца в направлении оси Y используется для увеличения объема измерения. Поэтому в одном варианте осуществления предпочтительно, чтобы размер образца в направлении оси Y был достаточно велик, чтобы содержать нужное количество шагов в этом направлении.
Предпочтительно, чтобы первый ограничитель 26 и второй ограничитель 28 были выполнены из материала, прозрачного для электромагнитных волн, излучаемых осветительным устройством, и электромагнитных волн, которые могут распространяться из образца 12. Материалом может служить прозрачный пластик или стекло. Часто бывает предпочтительно, чтобы первый ограничитель 26 и второй ограничитель 28 были параллельны друг другу.
В качестве первого ограничителя 26 можно использовать прозрачную фольгу, покрывающую образец и, таким образом, не параллельную другой пластине. Если образец является веществом с низкой вязкостью или даже твердым веществом, измерения можно проводить без первого ограничителя - см. фиг 2. На фиг. 2 показано устройство 26 для образца, содержащее образец 12. В качестве образца может выступать капля крови или другой жидкости, но часто бывает предпочтительно, чтобы вязкость была низкой. В этом случае, первый ограничитель содержится в поверхности образца.
Устройство для образца может содержать канал с прямоугольным поперечным сечением. Канал может иметь размеры, например, H×W×L=100 мкм ×2 мм ×5 см. В одном варианте осуществления предпочтительно, чтобы устройство для образца могло перемещаться по всей длине канала.
В одном варианте осуществления устройство для образца может быть ограничено вращающимся диском, и неподвижная камера может записывать частичный объем диска в форме кольца, например дорожки на CD. Кроме того, камера может перемещаться в радиальном направлении, чтобы записывать весь объем диска. В одном варианте осуществления, сканирование устройства для образца осуществляется по тому же принципу, что и воспроизведение CD, где лазерная головка перемещается от центра к периферии.
Перенос устройства для образца относительно камеры можно обеспечивать разными способами, например с использованием стола переноса в одном или двух измерениях (перенос по осям X, Y). Перенос также может быть вращением диска и переносом к центру (R, θ).
Перенос можно совершать точными этапами, определяемыми либо калибровкой “мотора” до измерения, либо с использованием кода, содержащегося в y-ограничителе устройства для образца.
Изображения, полученные устройством получения изображения, могут сохраняться на запоминающем устройстве. Запоминающее устройство может быть запоминающим устройством любого рода, способным сохранять изображения. Запоминающее устройство может, например, содержать блок энергозависимой памяти, которому требуется питание для поддержания сохраненной информации. Одним примером блока памяти энергозависимого типа является блок оперативной памяти, например динамическая оперативная память и статическая оперативная память. Запоминающее устройство также может содержать энергонезависимую память, в которой сохраненная информация может оставаться даже в отсутствие питания. Примеры энергонезависимой памяти включают в себя жесткий диск, флэш-память, CD-ROM, DVD, BlueRay, постоянную память, флэш-память или аналогичный носитель информации.
Устройство 24 освещения изображения, показанное на фиг. 1, предпочтительно, способно передавать электромагнитные волны через область 10 получения изображения в устройстве 18 для образца к устройству получения изображения, содержащемуся в узле оптической регистрации 15. Устройство 24 освещения изображения также может располагаться в других позициях относительно образца в зависимости от фактической формы устройства и требований к освещению образца.
Часто бывает предпочтительно, чтобы первый ограничитель 26 и второй ограничитель 28 были выполнены из материала, прозрачного для электромагнитных волн, излучаемых осветительным устройством 24.
Осветительное устройство 24, в одном варианте осуществления, способно передавать электромагнитные волны с длиной волны от приблизительно 495 нм до приблизительно 570 нм, также известные как зеленый свет, но свет может иметь и другие длины волны в пределах от приблизительно 0,01 нм до приблизительно 15 км. Свет может изучаться лазером, например лазерным диодом, СИД, электролампой иди другими стандартными источниками света.
Также можно использовать другие методы освещения, например поляризацию, фотолюминесценцию, фосфоресценцию и электролюминесценцию.
Осветительное устройство 24 может содержать более одного источника света. В одном варианте осуществления осветительное устройство содержит красный СИД и инфракрасный СИД. Осветительные устройства можно включать по отдельности для освещения образца для двух разных видов. Например, одно осветительное устройство можно использовать для отсчета количества клеток определенного типа в образце, а другое осветительное устройство можно использовать для определения параметра, описывающего клетки определенного типа.
Узел оптической регистрации 15 содержит, по меньшей мере, одно устройство 16 получения изображения. Устройством 16 получения изображения может быть цифровая камера любого рода, например камера на ПЗС или КМОП.
Узел оптической регистрации 15 может содержать одну или несколько линз для формирования пучка и для увеличения изображений. Узел оптической регистрации 15 также может содержать другие оптические элементы, например зеркала, диафрагмы, клинья, призмы, голограммы, линзы Френеля и т.д.
На фиг. 7 показан элемент 32 улучшения изображения. Формирование изображения образца под наклоном может приводить к погрешностям изображения, которые затрудняют регистрацию частиц. Элемент 32 улучшения изображения может быть установлен на оптическом пути между образцом и устройством 16 получения изображения. Присутствуя на оптическом пути, элемент улучшения изображения, показанный на фиг. 7, изменяет направление оптического пути.
Можно установить такую глубину поля (DOF) узла оптической регистрации 15, при которой область получения изображения будет строго задана без значительной помехи со стороны частиц, находящихся не в фокусе позади или перед областью получения изображения.
При создании разбиения на оптические срезы, предпочтительно, чтобы размер шага или расстояние между измерениями в образце было меньше, чем DOF. Это гарантирует, что частицы всегда будут изображаться в фокусе.
В одном варианте осуществления изобретения угол системы построения изображения относительно плоскости, содержащей ограничитель по оси z, позволяет гарантировать, что первый и второй ограничители в направлении оси Z находятся в области получения изображения образца. Также предпочтительно, чтобы ограничители в направлении оси Y находились в области получения изображения. Это гарантирует, что все частицы в исследуемой части устройства для образца можно регистрировать и что изображается любое кодирование устройства для образца. Кодирование ограничителя образца можно использовать для определения положения устройства для образца, которое, в свою очередь, можно использовать для определения объема измеряемой части образца.
В одном варианте осуществления изобретения, ограничители в направлении оси z и в направлении оси y не находятся в области получения изображения образца. В этом случае объем образца, в котором произведены измерения, определяется с использованием данных, относящихся к оптическому увеличению, полученному в процессе калибровки, предшествующем измерению.
Специалисту очевидно, что любая комбинация 0 или более ограничителей по осям z и y в области получения изображения позволяет определять объем образца, используемый для измерения, при условии, что данные, относящиеся к оптическому увеличению, определены для ограничителей, находящихся вне области получения изображения, до начала измерения.
На фиг. 4 показан один вариант осуществления изобретения, содержащий 2 узла оптической регистрации. Первый оптический узел 15A, содержащий устройство 16A получения изображения и объектив 14A, предназначен для получения изображений с одной стороны устройства 18 для образца, а второй оптический узел 15B, содержащий устройство 16B получения изображения и объектив 14B, предназначен для получения изображений с, по существу, противоположного направления. Как показано для других вариантов осуществления, образец можно переносить и можно получать последовательности изображений. Поскольку частицы изображаются с, по существу, противоположных направлений, информацию можно объединять для получения 3D информации о частицах.
На фиг. 5 показан один вариант осуществления изобретения. Установка содержит первый узел оптической регистрации 15C, содержащий объектив 14C и устройство 16C получения изображения. Устройство 16C получения изображения наклонено относительно оптической оси 13 согласно принципу Шаймпфлюга. Область 10 получения изображения также наклонена относительно оптической оси 10. Предпочтительным наклоном является перпендикуляр к ограничителям устройства 18 для образца, чтобы область получения изображения охватывала все расстояние между двумя ограничителями. Установка дополнительно может содержать второй узел оптической регистрации 15D, содержащий объектив 14D и устройство 16D получения изображения. Устройство 16d получения изображения наклонено относительно оптической оси 13 согласно принципу Шаймпфлюга. Область 10 получения изображения также наклонена относительно оптической оси 10. Предпочтительным наклоном является перпендикуляр к ограничителям устройства 18 для образца, чтобы область получения изображения охватывала все расстояние между двумя ограничителями. Предпочтительно, чтобы два узла оптической регистрации 15C и 15D совместно использовали область 10 получения изображения, позволяя производить 3D измерения частиц в образце 12.
На фиг. 8 показан один вариант осуществления изобретения. Установка содержит первый узел оптической регистрации 15E, содержащий объектив 14E и устройство 16E получения изображения. Область оптического получения 10E содержит первый ограничитель 26 и второй ограничитель 28. Второй узел оптической регистрации 15F, содержащий объектив 15E и устройство 14F получения изображения, должен иметь область оптического получения 10F, совпадающую с областью 10E получения изображения. Оптическое увеличение второго узла оптической регистрации 15F больше, чем оптическое увеличение первого узла оптической регистрации 15E. Эту установку предпочтительно использовать для сканирования частиц с использованием первого узла оптической регистрации 15E и, после их обнаружения, исследования частицы с более сильным увеличением с использованием второго узла оптической регистрации 15F. Установку также можно использовать для получения 3D информации о найденных частицах.
На фиг. 9 показана фокальная функция. Положения изображений задаются по оси x, а по оси y может быть отложен любой данный параметр, позволяющий определять, находится ли частица в фокусе, например контрастность и яркость, а также их комбинации.
На фиг. 10 показан один вариант осуществления изобретения. Вариант осуществления изобретения, представленный на фигуре, аналогичен варианту осуществления, показанному на фиг. 8, за исключением того, что области оптического получения 10G и 10H не совпадают. Эту установку предпочтительно использовать для образцов, перемещающихся шагами без пауз между отдельными шагами и получениями изображения. В случае регистрации частицы в области 10H получения изображения, та же частица может быть найдена на конкретное число шагов позже в области 10G получения изображения.
На фиг. 11B показан один вариант осуществления изобретения, где добавлен дополнительный элемент оптического улучшения 32 для повышения качества полученного изображения. Элементом оптического улучшения 32 является диафрагма, и DOF узла оптической регистрации 15 зависит от размера апертуры, созданной диафрагмой. Чем меньше апертура, тем больше DOF - см. фиг. 11A, и чем больше апертура, тем меньше DOF - см. фиг. 11B.
Любой из показанных вариантов осуществления можно использовать для “отслеживания частиц”. Отслеживание частиц состоит в наблюдении за частицей, когда частица активируется, например, ультразвуковыми волнами или светом конкретной длины волны (УФ, ИК) или когда она изменяется в ходе нормального старения или вследствие химической реакции или нагрева.
Для получения наилучших результатов наблюдений, частица должна “покоиться”, но если образец присутствует в жидком виде, частицы могут совершать малые движения, даже если частица “покоится”. Например, частицы могут осаждаться в течение периода наблюдения. Таким образом, положения устройства для образца относительно камеры можно динамически регулировать в течение периода наблюдения.
Наблюдение можно осуществлять, например, согласно способу, содержащему ряд отдельных или комбинированных этапов:
1. Позиционировать устройство для образца в измерительной установке,
2. Активировать стол переноса для перемещения устройства для образца на один шаг,
3. Получить изображение образца в устройстве для образца,
4. Активировать программное обеспечение анализа изображения для поиска нужной частицы в изображении,
5. Если частица найдена, перейти к следующему этапу, иначе вернуться к этапу 2.
В одном варианте осуществления, наблюдаемые частицы изображаются в фокусе. Поэтому может потребоваться точная регулировка положения устройства для образца для получения частицы в наилучшем фокусе. Положение наилучшего фокуса можно определять с использованием фокальной функции - см. фиг. 9. Если частица изображается в положении 3, изображение имеет наилучшую фокусировку, но если частица изображается в другом положении, например в положении 2 или положении 4, нужно активировать привод для перемещения устройства для образца в наилучший фокус. Таким образом, процедуру наблюдения можно продолжать согласно способу, содержащему следующие отдельные или комбинированные этапы:
6. Активировать программное обеспечение анализа изображения для определения плоскости наилучшего фокуса для частицы,
7. Если частица изображается в плоскости наилучшего фокуса, перейти к этапу 9,
8. Если частица изображается не в фокусе, переместить устройство для образца для получения частицы в наилучшем фокусе,
9. Начать или продолжать действия с исследуемой частицей,
10. Получить изображение образца в устройстве для образца,
11. Активировать программное обеспечение анализа изображения для определения изменения исследуемой частицы,
12. Если исследование нужно продолжать, перейти к этапу 6, иначе остановиться.
Изображения, полученные и проанализированные на этапе 10, можно сохранять для дальнейшего анализа.
Следует обратить внимание на то, что описанные здесь варианты осуществления не налагают никаких ограничений и что возможны многие альтернативные варианты осуществления в объеме защиты, заданном нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБКИЙ КОНТЕЙНЕР ДЛЯ ОБРАЗЦА | 2011 |
|
RU2557603C2 |
| СИСТЕМА И СПОСОБ ДЛЯ СВЯЗАННОЙ СО ВРЕМЕНЕМ МИКРОСКОПИИ БИОЛОГИЧЕСКИХ ОРГАНИЗМОВ | 2010 |
|
RU2548597C2 |
| ОПТИЧЕСКАЯ СИСТЕМА И СПОСОБ ДЛЯ АНАЛИЗА В РЕАЛЬНОМ ВРЕМЕНИ ЖИДКОГО ОБРАЗЦА | 2014 |
|
RU2666816C2 |
| СПОСОБ И СИСТЕМА ДВОЙНОГО ИЗОБРАЖЕНИЯ ДЛЯ ГЕНЕРАЦИИ МНОГОМЕРНОГО ИЗОБРАЖЕНИЯ ОБРАЗЦА | 2012 |
|
RU2610216C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ОПТИЧЕСКИХ ТОМОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2439539C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ЗАХВАТА ДАННЫХ ИЗОБРАЖЕНИЙ ПРИ МНОГОЧИСЛЕННЫХ ГЛУБИНАХ ОБРАЗЦА | 2015 |
|
RU2678505C2 |
| СПОСОБ ОЦЕНКИ СТРУКТУРНЫХ ИЗМЕНЕНИЙ ОБРАЗЦА МАТЕРИАЛА В РЕЗУЛЬТАТЕ ВОЗДЕЙСТВИЯ НА ОБРАЗЕЦ | 2014 |
|
RU2673774C2 |
| КАМЕРА ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813445C1 |
| СПЕКТРОСКОПИЧЕСКАЯ ГОЛОВКА ДЛЯ ЦИФРОВОГО ОПТИЧЕСКОГО БЛОКА УСТРОЙСТВА ДЛЯ ИДЕНТИФИКАЦИИ МИКРООРГАНИЗМОВ В ИССЛЕДУЕМОМ БИОЛОГИЧЕСКОМ ОБРАЗЦЕ | 2024 |
|
RU2825977C1 |
| МОДУЛЬ И СИСТЕМА ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813210C1 |
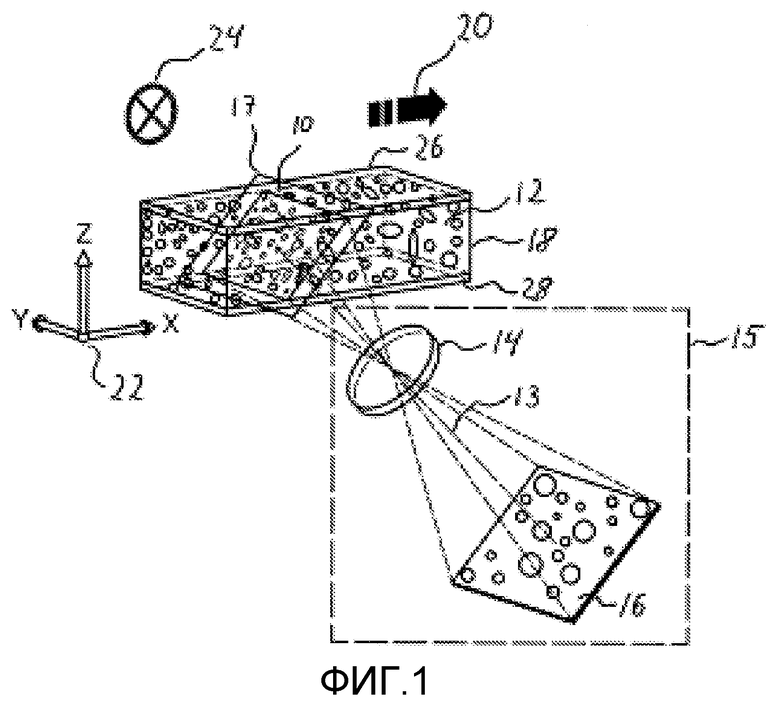
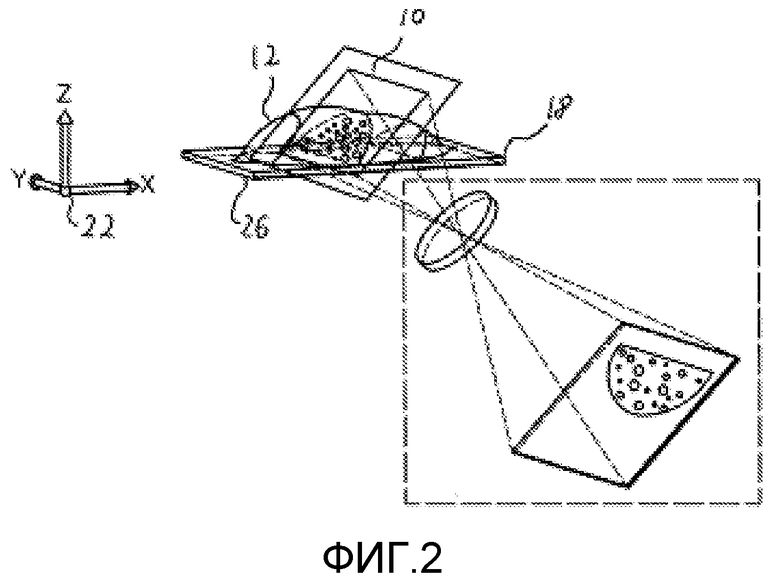
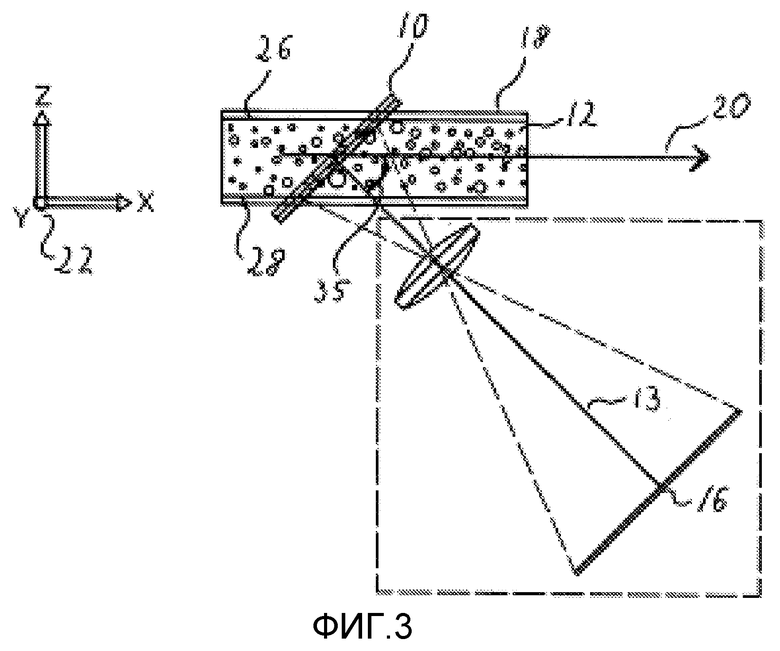
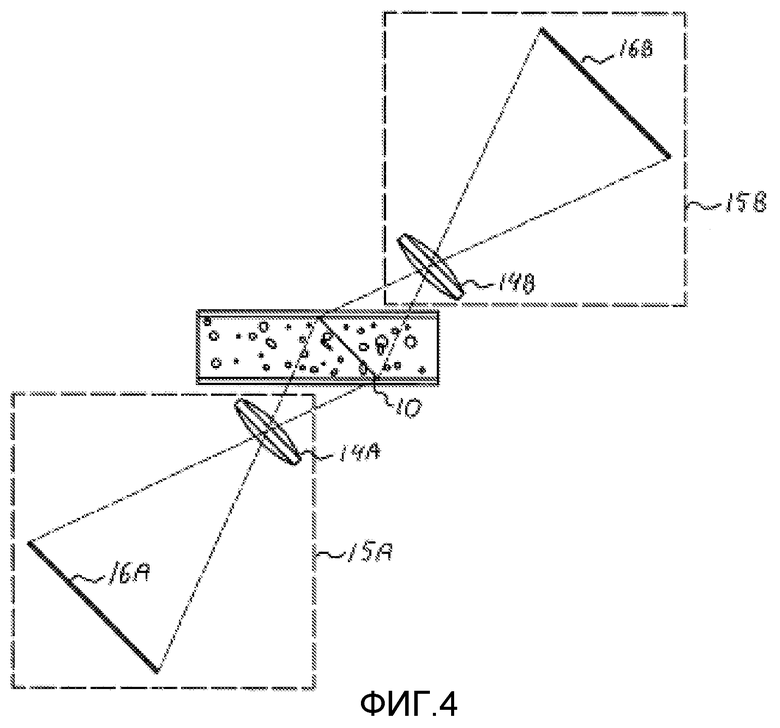
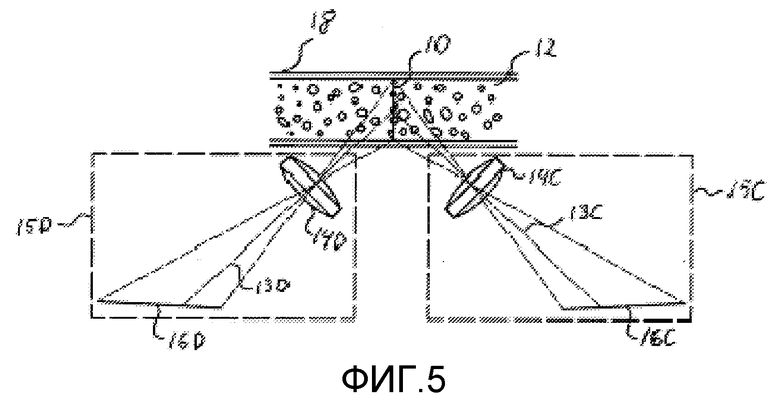
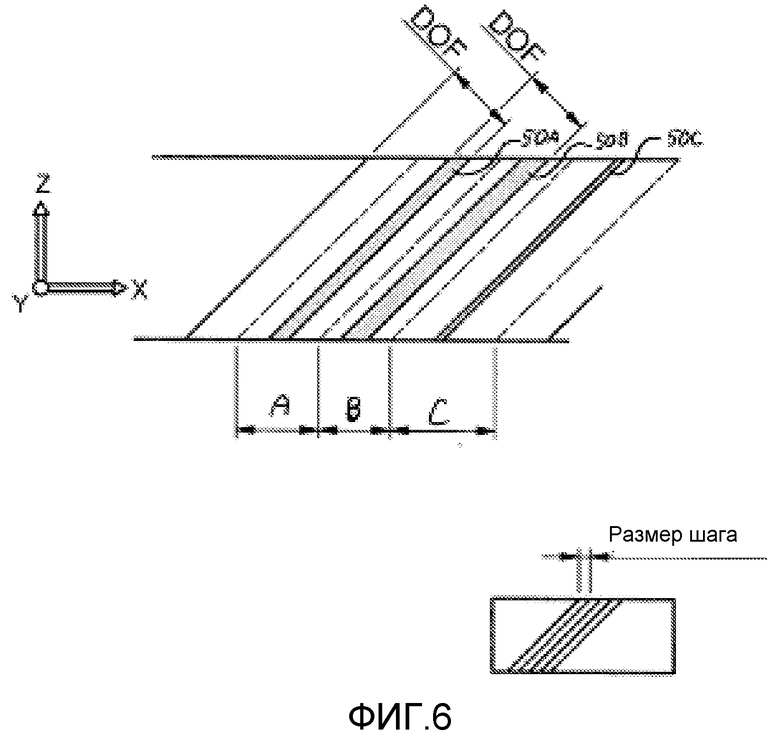
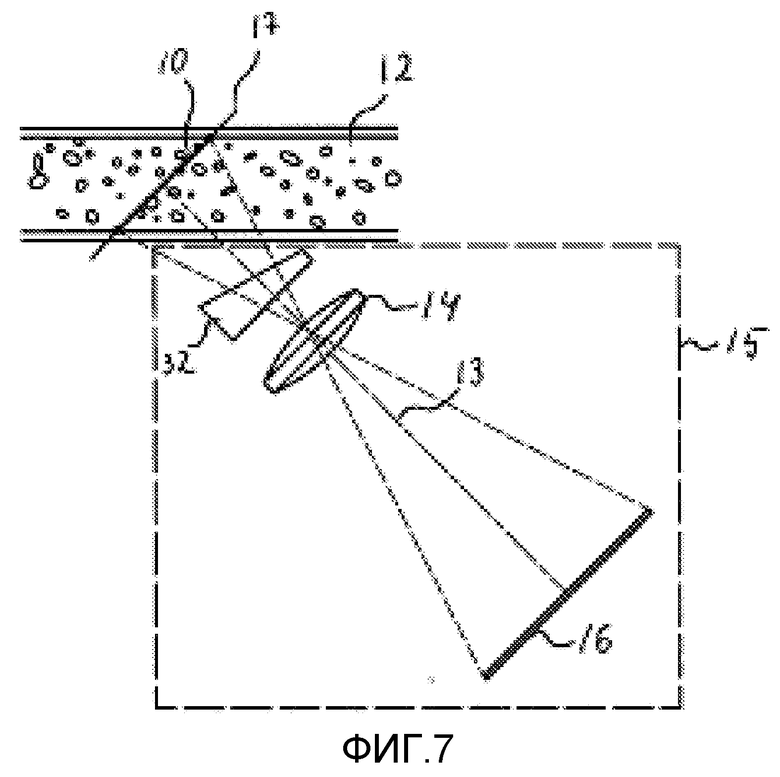
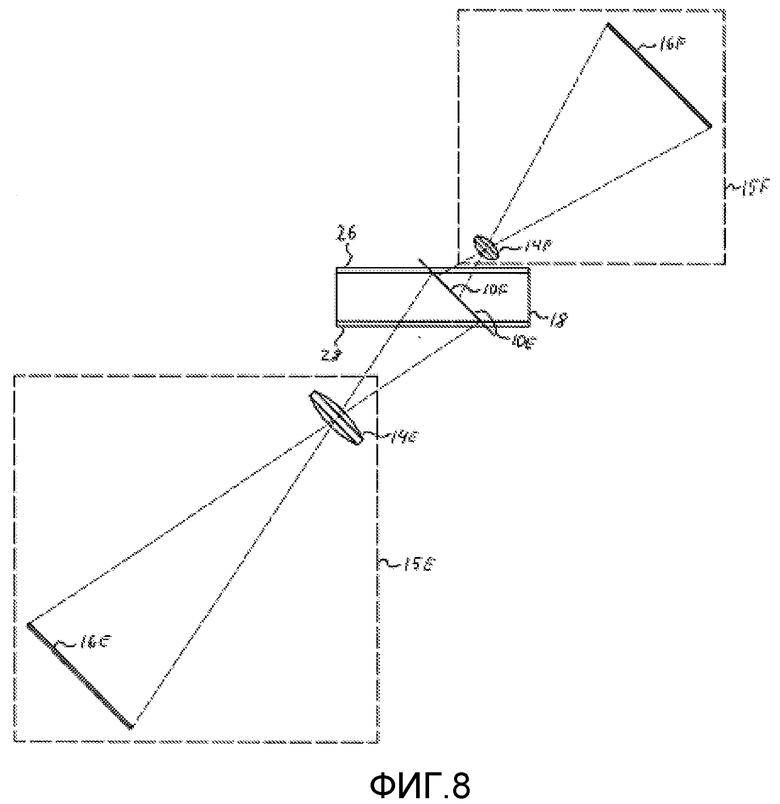
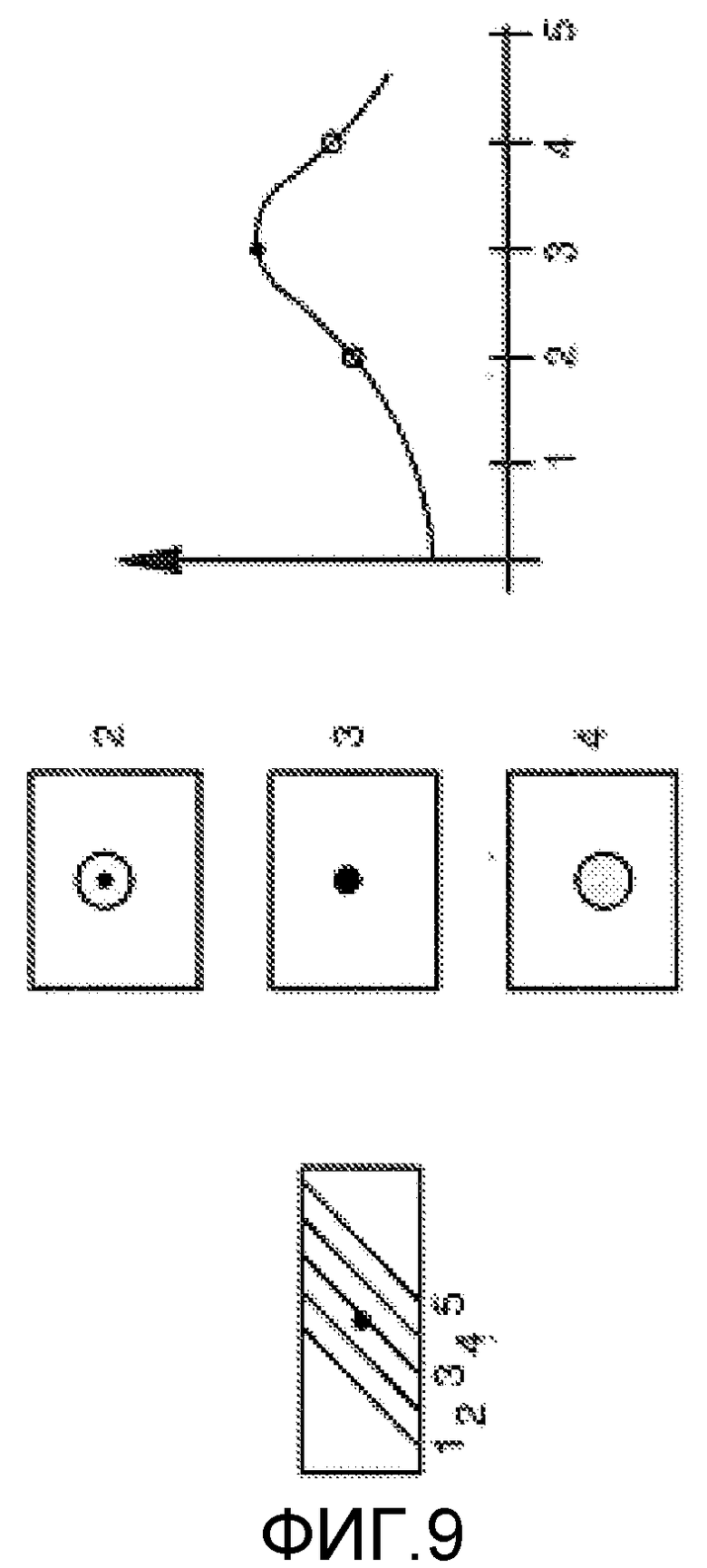
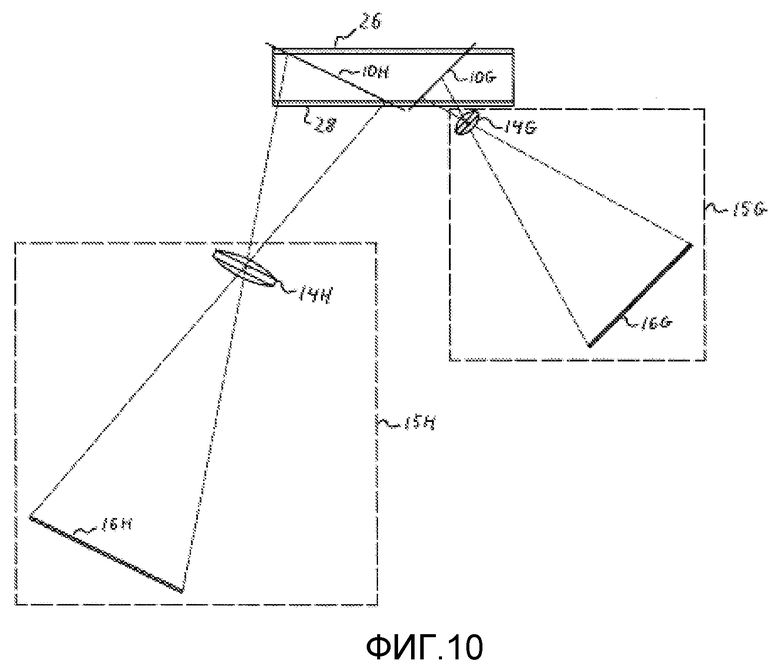
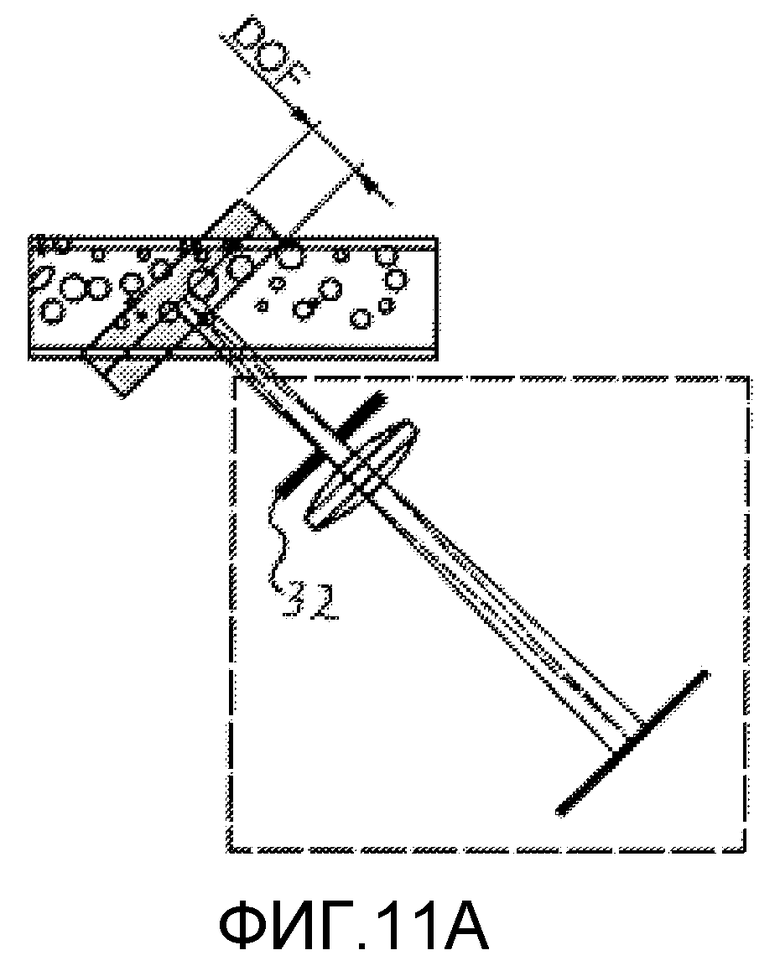
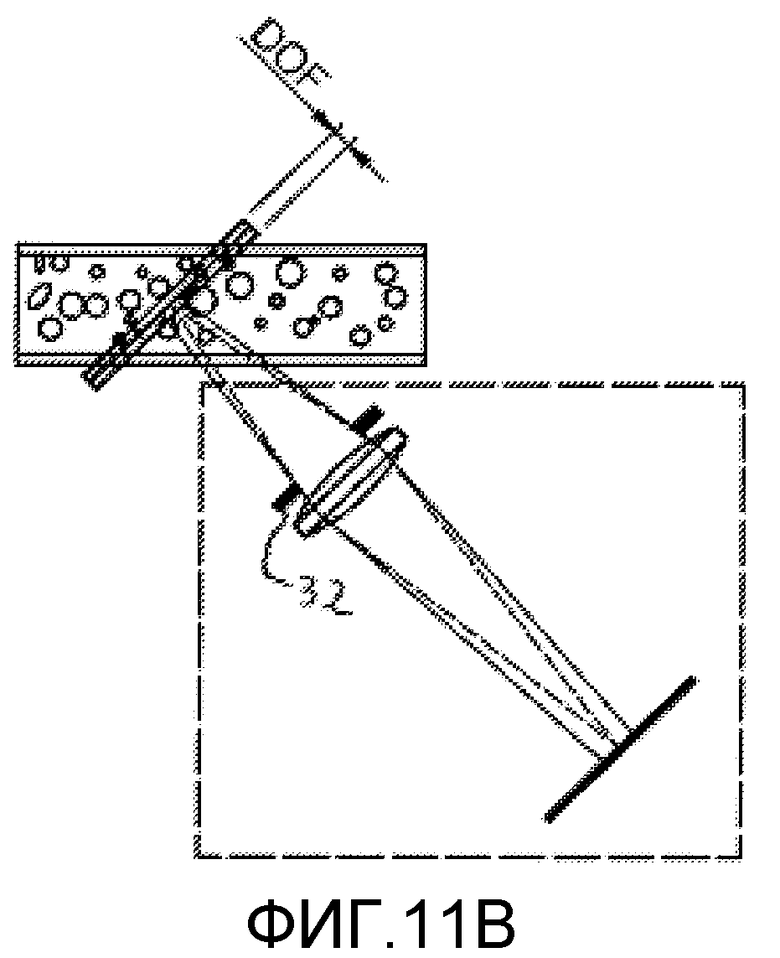
Изобретение относится к устройству, способу и системе исследования неоднородного жидкого образца, включающего в себя получение множества изображений упомянутого образца, размещенного относительно устройства для образца. Заявленное устройство содержит, по меньшей мере, первый узел оптической регистрации, имеющий оптическую ось, и, по меньшей мере, один блок переноса, выполненный с возможностью перемещения устройства для образца и первого узла оптической регистрации относительно друг друга. Движение устройства для образца и первого узла оптической регистрации относительно друг друга происходит вдоль пути сканирования, который образует угол θ с оптической осью, причем θ находится в пределах от приблизительно 60 до приблизительно 89,5 градусов. Заявленный способ исследования неоднородного жидкого образца включает в себя получение множества изображений упомянутого образца и содержит этапы, на которых размещают образец относительно устройства для образца; размещают устройство для образца относительно вышеуказанного устройства, перемещают устройство для образца и первый узел регистрации относительно друг друга по длине сканирования, причем движение включает в себя движение в направлении вдоль первого пути сканирования, который образует угол θ с оптической осью, причем θ находится в пределах от приблизительно 60 до приблизительно 89,5 градусов, причем электромагнитные волны передают из устройства освещения изображения через область получения изображения в направлении устройства получения изображения и получают множество изображений. Технический результат, достигаемый от реализации заявленной группы изобретений, заключается в освещении образца для передачи электромагнитных волн через область получения изображения в устройстве для образца к устройству получения изображения для усовершенствования устройства для получения множества изображений неоднородного образца. 2 н. и 54 з.п. ф-лы, 11 ил.
1. Устройство для исследования неоднородного жидкого образца, включающего в себя получение множества изображений упомянутого образца, размещенного относительно устройства для образца, содержащее:
a) по меньшей мере, первый узел оптической регистрации, содержащий, по меньшей мере, первое устройство получения изображения, причем первый узел оптической регистрации имеет оптическую ось и объектную плоскость, причем объектная плоскость содержит область получения изображения, из которой первое устройство получения изображения может регистрировать электромагнитные волны в качестве изображения;
b) по меньшей мере, один блок переноса, выполненный с возможностью перемещения устройства для образца и первого узла оптической регистрации относительно друг друга;
c) причем упомянутое устройство выполнено с возможностью поддержки первого узла оптической регистрации и блока переноса, причем первый узел оптической регистрации и блок переноса выполнены так, что область получения изображения пересекает, по меньшей мере, часть устройства для образца;
d) дополнительно содержащее устройство освещения изображения;
причем перемещение устройства для образца и первого узла оптической регистрации относительно друг друга происходит вдоль пути сканирования, который образует угол θ с оптической осью, причем θ находится в пределах от приблизительно 60 до приблизительно 89.5 градусов, и
причем устройство освещения изображения выполнено с возможностью передачи электромагнитных волн через область получения изображения в направлении устройства получения изображения.
2. Устройство по п.1, дополнительно содержащее устройство анализа изображения для анализа изображений, записанных первым устройством получения изображения, причем устройство анализа изображения содержит алгоритмы распознавания шаблонов, выполненные с возможностью определения, при каком положении объектной плоскости в образце объект, появляющийся в, по меньшей мере, части некоторого количества изображений, находится в фокусе.
3. Устройство по п.2, выполненное с возможностью обеспечения разбиения образца на оптические срезы, содержащее блок объединения, выполненный с возможностью обработки, по меньшей мере, части множества изображений, полученных вдоль пути сканирования разбиения на оптические срезы, в 2D и/или 3D реконструкцию образца.
4. Устройство по п.2, дополнительно содержащее, по меньшей мере, один блок управления, выполненный с возможностью управления, по меньшей мере, одним блоком переноса и получением изображений первым устройством получения изображения, причем блок управления содержит устройство анализа изображения.
5. Устройство по п.2, выполненное с возможностью определения, по меньшей мере, одного параметра объема неоднородного образца, размещенного относительно устройства для образца.
6. Устройство по п.5, выполненное с возможностью определения, по меньшей мере, одного параметра объема неоднородного жидкого образца, размещенного относительно устройства для образца.
7. Устройство по п.5, выполненное с возможностью получения и анализа изображений, пока не будет идентифицировано заранее определенное количество частиц, с одновременным определением размера изображаемой и анализируемой части объема образца.
8. Устройство по п.7, выполненное с возможностью определения концентрации частиц с заранее определенным качеством в неоднородном образце на основании заранее определенного количества частиц с заранее определенным качеством и размера изображаемой и анализируемой части объема.
9. Устройство по п.6, выполненное с возможностью получения и анализа изображений, пока не будет идентифицировано заранее определенное количество частиц, с одновременным определением размера изображаемой и анализируемой части объема образца.
10. Устройство по п.9, выполненное с возможностью определения концентрации частиц с заранее определенным качеством в неоднородном образце на основании заранее определенного количества частиц с заранее определенным качеством и размера изображаемой и анализируемой части объема.
11. Устройство по п.2, в котором устройство анализа изображения содержит блок идентификации границ, выполненный с возможностью идентификации, по меньшей мере, одной границы образца в изображениях.
12. Устройство по п.11, в котором блок идентификации границ выполнен с возможностью идентификации первой границы, заданной первым ограничителем, причем первый ограничитель, по существу, параллелен пути сканирования, и второй границы, заданной вторым ограничителем, по существу, параллельным первому ограничителю, причем первый и второй ограничители, по существу, параллельны друг другу и пути сканирования.
13. Устройство по п.12, причем это устройство выполнено с возможностью определения анализируемого объема образца на основе измерения разнесения первой и второй границ.
14. Устройство по п.12, причем это устройство выполнено с возможностью определения анализируемого объема неоднородного образца на основе измерения разнесения первой и второй границ, размера области получения изображения и длины сканированного пути.
15. Устройство по п.8, в котором анализируемая часть объема неоднородного образца определяется размером области получения изображения и длиной сканированного пути.
16. Устройство по п.10, в котором анализируемая часть объема неоднородного образца определяется размером области получения изображения и длиной сканированного пути.
17. Устройство по п.2, в котором узел оптической регистрации содержит, по меньшей мере, первую диафрагму, имеющую регулируемое отверстие, позволяющее регулировать глубину поля (DOF) объектной плоскости.
18. Устройство по п.1, содержащее второе устройство получения изображения с более высоким разрешением изображения, чем разрешение у первого устройства получения изображения.
19. Устройство по п.1, дополнительно содержащее второй блок переноса, выполненный с возможностью перемещения устройства для образца и первого узла оптической регистрации относительно друг друга.
20. Устройство по п.1, в котором блок переноса выполнен с возможностью перемещения устройства для образца и, по меньшей мере, одного узла оптической регистрации относительно друг друга в, по существу, вращательном режиме.
21. Устройство по п.20, в котором блок переноса выполнен с возможностью перемещения устройства для образца и, по меньшей мере, одного узла оптической регистрации относительно друг друга, по существу, одинаковыми шагами с заранее определенным угловым шагом между двумя последовательными изображениями в пределах от 0,01 градуса до 1 градуса.
22. Устройство по п.20, причем это устройство выполнено с возможностью вращения устройства для образца и перемещения узла оптической регистрации вдоль радиальной оси вращательного движения.
23. Устройство по п.1, в котором длина волны электромагнитного излучения находится в пределах от приблизительно 200 нм до приблизительно 1100 нм.
24. Устройство по п.2, в котором блок анализа изображения выполнен с возможностью идентификации неоднородностей в неоднородном образце, причем неоднородности содержат частицы биологического происхождения, выбранные из группы, содержащей бактерии, архебактерии, дрожжи, грибы, пыльцу, вирусы, лейкоциты, например гранулоциты, моноциты, эритроциты, тромбоциты, ооциты, сперму, зиготу, стволовые клетки, соматические клетки, дрожжевые клетки, бластоциты и/или зиготы.
25. Устройство по п.2, в котором блок анализа изображения выполнен с возможностью идентификации неоднородностей в неоднородном образце, причем неоднородности содержат частицы небиологического происхождения, выбираемые из металлических осколков, капель воды в масле, пигментов в краске и/или загрязнений в воде.
26. Устройство по п.2, в котором блок анализа изображения выполнен с возможностью идентификации неоднородностей в неоднородном образце и выполнен с возможностью определения количественных и качественных параметров лейкоцитов в образце.
27. Устройство по п.2, в котором блок анализа изображения выполнен с возможностью идентификации неоднородностей в неоднородном образце и выполнен с возможностью определения количества эритроцитов в образце, которые заражены паразитирующими простейшими.
28. Устройство по п.2, в котором блок анализа изображения выполнен с возможностью идентификации неоднородностей в неоднородном образце, и причем, по меньшей мере, первое устройство получения изображения выполнено с возможностью регистрации изображений, содержащих свет, излучаемый неоднородностями в образце в ответ на процесс хемилюминесценции.
29. Устройство по п.2, выполненное с возможностью оценки физического состояния ракового пациента и готовности этого пациента к химиотерапевтическому лечению.
30. Устройство по п.4, в котором блок управления содержит контур обратной связи, выполненный с возможностью повторного осуществления последовательности, содержащей:
a) получение изображения;
b) анализ изображения; и
c) регулировку относительного положения устройства для образца и узла оптической регистрации.
31. Устройство по п.30, выполненное с возможностью отслеживания частицы в образце.
32. Устройство по п.1, в котором глубина поля (DOF), по меньшей мере, одного оптического элемента больше или равна длине шага блока переноса.
33. Устройство по п.6, выполненное таким образом, что образец находится, по существу, в состоянии покоя при получении, по меньшей мере, части множества изображений.
34. Способ исследования неоднородного жидкого образца, включающего в себя получение множества изображений упомянутого образца, содержащий этапы, на которых:
a) размещают образец относительно устройства для образца;
b) размещают устройство для образца относительно устройства по п.1;
c) перемещают устройство для образца и первый узел регистрации относительно друг друга по длине сканирования, причем движение включает в себя движение в направлении вдоль первого пути сканирования, который образует угол θ с оптической осью, причем θ находится в пределах от приблизительно 60 до приблизительно 89.5 градусов;
d) причем электромагнитные волны передают из устройства освещения изображения через область получения изображения в направлении устройства получения изображения;
e) получают множество изображений.
35. Способ по п.34, дополнительно содержащий этап, на котором анализируют изображения, записанные первым устройством получения изображения, содержащий этап, на котором идентифицируют края объектов в изображениях, причем, по меньшей мере, один алгоритм распознавания шаблона используется для анализа изображений для различения областей разной яркости в изображениях и/или для идентификации переходов между более яркими и более темными областями в изображении.
36. Способ по п.35, в котором некоторое количество изображений, показывающих соседние части данного образца, анализируют для определения, при каком положении объектной плоскости вдоль пути сканирования объект, появляющийся в нескольких изображениях, находится в фокусе.
37. Способ по п.36, содержащий этап, на котором определяют площадь объекта в изображениях.
38. Способ по п.37, в котором положение объектной плоскости вдоль пути сканирования, в котором объект находится в фокусе, определяют на основе кривой, показывающей площадь объекта в изображениях в зависимости от положения вдоль пути сканирования.
39. Способ по п.38, в котором, по меньшей мере, одну границу образца с его окружением идентифицируют в, по меньшей мере, одном из изображений.
40. Способ по п.34, в котором, когда образец размещается относительно устройства для образца, содержащего опору, опора, по существу, параллельна пути сканирования.
41. Способ по п.40, в котором образец является каплей жидкого образца, помещенной на опору, причем способ содержит этапы, на которых идентифицируют первую границу образца, содержащую границу раздела между образцом и опорой, и идентифицируют вторую границу образца, содержащую границу раздела между образцом и окружающей атмосферой.
42. Способ по п.40, содержащий этап, на котором определяют разнесение первой и второй границ.
43. Способ по п.42, содержащий этап, на котором определяют анализируемый объем образца из разнесения первой и второй границ образца, сканированной длины образца и размера области получения изображения.
44. Способ по п.43, содержащий этап, на котором определяют анализируемую часть объема образца из разнесения первой и второй границ образца, разнесения третьей и четвертой границ образца и сканированной длины образца.
45. Способ по п.35, дополнительно содержащий этап, на котором считывают информацию, обеспечиваемую путем кодирования на устройстве для образца, например информацию, относящуюся к положению на устройстве для образца, позволяющую определить положение в направлении сканирования, в котором получают каждое из множества изображений.
46. Способ по п.35, содержащий этапы, на которых получают и анализируют изображения, пока не будет идентифицировано заранее определенное количество частиц с заранее определенным качеством, и в котором определяют размер изображаемой и анализируемой части объема неоднородного образца.
47. Способ по п.46, содержащий этап, на котором определяют концентрацию частиц с заранее определенным качеством в неоднородном образце на основании заранее определенного количества частиц с заранее определенным качеством и размера изображаемой и анализируемой части объема.
48. Способ по п.34, содержащий этап, на котором получают множество изображений путем однократного сканирования образца вдоль оси сканирования.
49. Способ по п.35, в котором на этапе анализа объединяют множество сканирований вдоль пути сканирования, причем каждое сканирование содержит, по меньшей мере, одно изображение.
50. Способ по п.49, в котором, по меньшей мере, одно сканирование производят с первой длиной шага и первым разрешением изображения, причем, по меньшей мере, второе сканирование производят со второй длиной шага и вторым разрешением изображения, причем длина первого шага больше или равна длине второго шага и первое разрешение изображения меньше или равно второму разрешению изображения.
51. Способ по п.35, содержащий этап, на котором определяют, по меньшей мере, один параметр объема неоднородного жидкого образца, размещенного относительно устройства для образца.
52. Способ по п.34, в котором, по меньшей мере, часть образца облучают электромагнитными волнами из второго устройства освещения изображения.
53. Способ по п.34, в котором, по меньшей мере, один блок переноса перемещает устройство для образца и, по меньшей мере, один узел оптической регистрации относительно друг друга, по существу, непрерывно и получают множество изображений с заранее определенным интервалом времени между двумя последовательными изображениями, причем заранее определенный интервал времени находится в пределах от приблизительно 10-9 с до приблизительно 103 с.
54. Способ по п.34, в котором блок переноса перемещает устройство для образца и, по меньшей мере, один узел оптической регистрации относительно друг друга, по существу, одинаковыми шагами с заранее определенной длиной шага между двумя последовательными изображениями, причем заранее определенная длина шага находится в пределах от приблизительно 0.05 микрометров до 1000 микрометров.
55. Способ по п.34, дополнительно содержащий этап, на котором перемещают устройство для образца и первый узел оптической регистрации относительно друг друга вдоль оси, имеющей угол с путем сканирования.
56. Способ по п.34, причем первый путь сканирования выбирают из группы, состоящей из оси сканирования и/или касательной к вращательному движению.
| US 20030138139 A1 24.07.2003 | |||
| US 20050259437 A1 24.11.2005; | |||
| US 20030103277 A1 05.06.2003 | |||
| СПОСОБ ОЦЕНКИ СОДЕРЖАНИЯ ЛЕЙКОЦИТОВ, ЭРИТРОЦИТОВ И ТРОМБОЦИТОВ В КРОВИ С УЧЕТОМ ГЕМОКОНЦЕНТРАЦИИ | 2002 |
|
RU2232988C2 |

