Настоящая заявка в целом относится к области визуализации и, в частности, к корректировке рассеяния фотонов во времяпролетных позитронно-эмиссионных томографах (PET). Она предоставляет способ непрерывного моделирования времяпролетного рассеяния и связанный способ корректировки данных визуализации PET, чтобы компенсировать рассеяние фотонов. Соответственно, она применяется к томографам PET с одиночной модальностью и томографам PET с двойной модальностью, типа систем PET/CT и систем PET/MR.
PET создает изображение или картину внутренних функциональных процессов, обычно в человеке или животном. Чтобы получить изображение PET пациента, в пациента сначала вводится радиофармацевтический препарат. Радиофармацевтический препарат содержит радиоактивный индикатор, который связывается с активной интересующей молекулой в теле пациента, например глюкозой. Радиофармацевтический препарат также излучает позитроны. Когда излученный позитрон сталкивается с электроном от ближайшего атома (как правило, ~1 мм), позитрон и электрон аннигилируют друг друга. В результате аннигиляции две разные световые частицы, или фотоны, излучаются практически в противоположных направлениях. Оба фотона двигаются с одинаковой скоростью, со скоростью света, индексированной для среды, через которую они проходят.
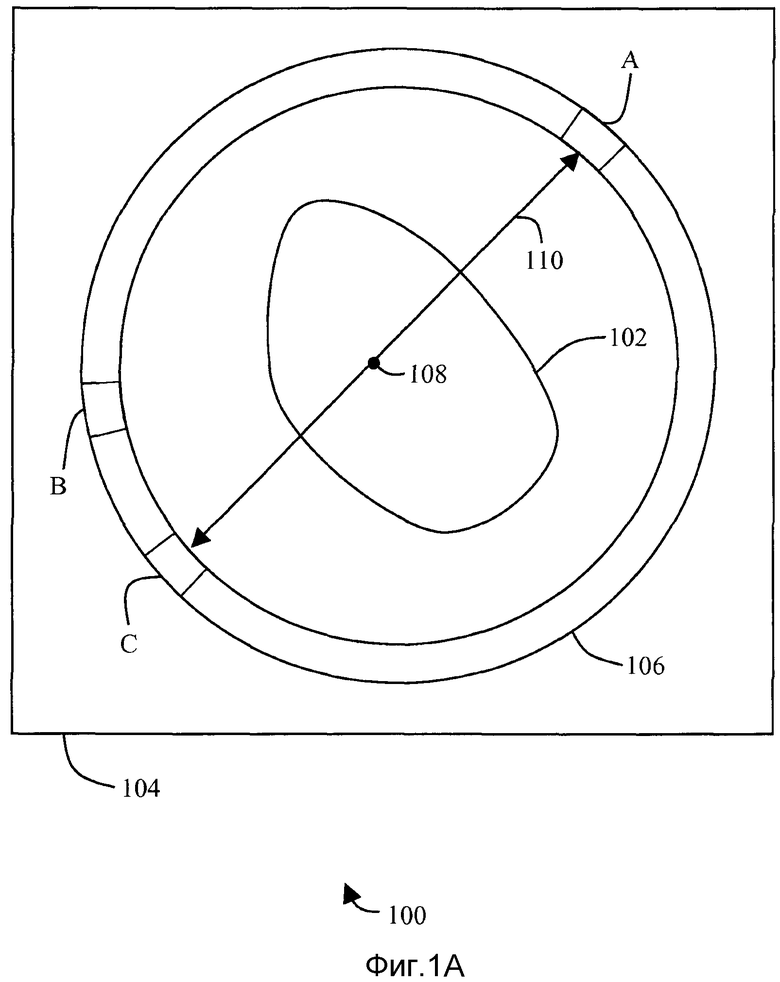
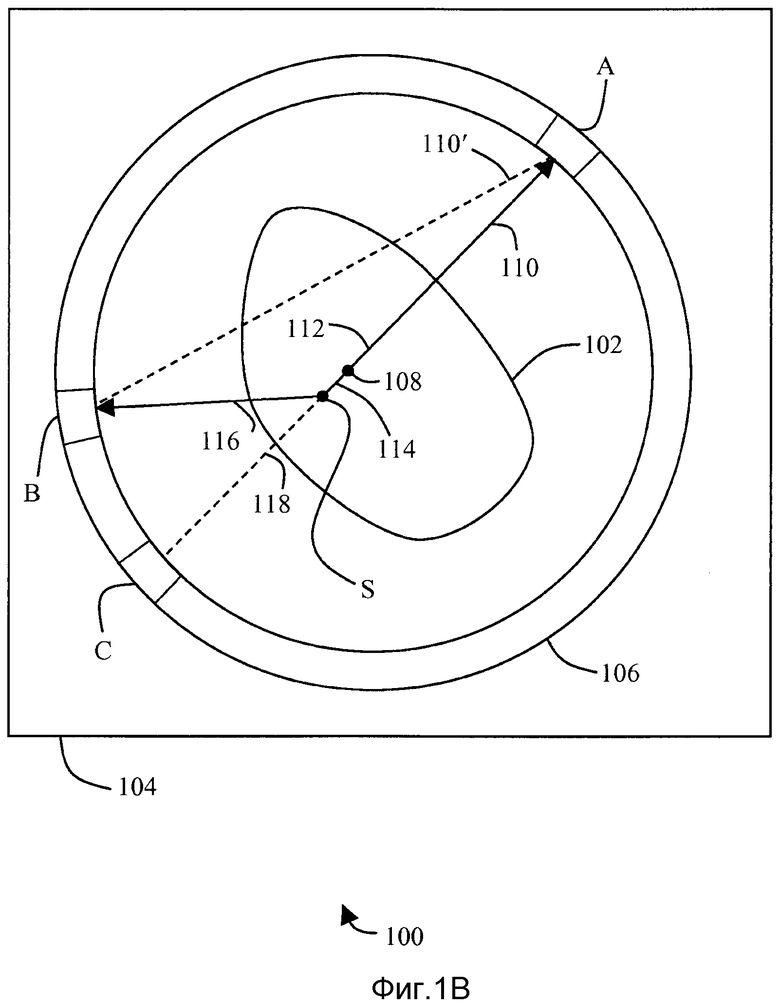
Фиг.1A и 1B схематически иллюстрируют томограф 100 PET. Пациент или отображаемый объект 102 размещается в пределах рамы 104 томографа 100 PET. Рама 104 содержит несколько детекторов фотонов, расположенных в кольце 106 вокруг пациента 102, чтобы обнаруживать фотонные пары, излученные в результате аннигиляций 108 позитронно-электронной пары. Для упрощения фигуры в этом документе иллюстрируют двумерные системы. Однако проиллюстрированные идеи с тем же успехом применяются к трехмерному миру. Только три детектора фотонов A, B и C показаны на Фиг.1A и 1B. В фактической системе 100 PET кольцо 106 детекторов обычно будет содержать несколько детекторов, а также может быть много колец детекторов, установленных вместе.
Заданный детектор, например детектор A, включающий ассоциированную электронику, способен очень точно распознавать время, в которое он обнаруживает фотон. Если два детектора, например детекторы A и C на Фиг.1A, записывают прием фотона в заданном периоде времени совпадения, то предполагается, что эта пара фотонов произошла от акта аннигиляции позитронно-электронной пары, например, 108. В частности, предполагается, что аннигиляция 108 произошла где-то на прямой линии, соединяющей детекторы A и C, называемой "линией ответа" 110, как показано на Фиг.1A. Такие пары событий обнаружения, или "совпадения", записываются системой 100 PET. Используя алгоритмы восстановления изображений, выполняемые компьютером, система 100 PET может использовать такие события совпадения для определения распространения радиофармацевтического препарата в пациенте. Это распространение используется для генерирования изображения PET.
В последние годы доступность быстрых и эффективных детекторов и усовершенствованной цифровой интерфейсной электроники обеспечила возможность измерения "времяпролетной" информации с помощью медицинских томографов 100 PET. При времяпролетной визуализации PET событие совпадения приобретается двумя детекторами, например A и C, вместе с разностью во времени поступления двух совпадающих фотонов. Так как два совпадающих фотона двигаются с одинаковой скоростью, разность времени поступления обладает прямой корреляцией со временем пролета фотонов от точки 108 аннигиляции до совпадающих детекторов A и C. Эта времяпролетная информация предсказывает наиболее вероятную точку возникновения аннигиляции, например, 108 на линии 110 ответа. В традиционной визуализации PET, не относящейся к времени пролета, можно только узнать, что событие 108 совпадения произошло где-то на линии 110 ответа, без какой-либо более точной информации касательно того, где это произошло на линии 110.
Вклады в сигнал визуализации, соответствующий линии 110 ответа между детекторами A и C, могут поступать от трех разных типов событий: события истинного совпадения, например, показанные на Фиг.1A, события рассеянного совпадения, например, показанные на Фиг.1B, и события случайного совпадения. События случайного совпадения можно учитывать отдельно от рассеяния, поэтому они больше здесь не обсуждаются. Фиг.1B иллюстрирует два фотона, излучаемых из точки 108 аннигиляции позитронно-электронной пары вдоль начальных траекторий 112 и 114. Один фотон продолжает движение по траектории 112, чтобы быть обнаруженным детектором A. Другой фотон подвергается комптоновскому рассеянию в точке S, когда он сталкивается с атомом или молекулой, поэтому он меняет направление на рассеянную траекторию 116. В результате рассеяния в точке S фотон отклоняется от траектории 118, которая привела бы к детектору C. Поэтому, если не учитывать рассеяние в S, то система 100 PET неправильно интерпретирует совпадение между детекторами A и B как происходящее от аннигиляции по наблюдаемой прямой линии 110′ ответа между двумя детекторами A и B. Между тем аннигиляция 108 фактически возникла на прямой линии 110 ответа между детекторами A и C. Это неверное предположение приведет к ошибкам в результирующем изображении PET. Таким образом, алгоритм восстановления изображений системы PET приведет к более точным результатам, если обработка способна учитывать такие рассеянные фотоны.
Имеется несколько известных способов учета рассеяния во времяпролетной визуализации PET. Эти известные способы включают в себя раскрытия в Bendriem и др., "A Technique for the Correction of Scattered Radiation in a PET System Using Time-of-Flight Information", J. Comput. Assist. Tomgr., 10: 287-295 (1986); Werner и др., "Implementation and Evaluation of a 3D PET Single Scatter Simulation with TOF Modeling", IEEE Nuclear Science Symposium Conference Record, 3: 1768-1773 (2006); Патенте США № 7129496, выданном Stearns и др.; и Патенте США № 7397035, выданном Watson и др. Многие из этих известных способов применяют имитационные модели однократного рассеяния (SSS) для оценки рассеяния фотонов. Такие модели предполагают, что один из двух совпадающих фотонов является нерассеянным, а другой совпадающий фотон рассеивается только один раз. На основании среды распространения и затухания излучения в изображаемом субъекте, которая записана системой 100 PET, SSS определяет вероятность события однократного рассеяния, например, S, вносящего вклад в сигнал излучения, записанный любыми двумя детекторами A, B в томографе 100 PET. Чтобы уменьшить необходимое время вычисления, SSS может включать в себя только пары детекторов, задающие линию 110 или 110′ ответа между ними, которая проходит через изображаемый субъект 102.
Многие из известных реализаций SSS используют подход с разбиением на интервалы времени пролета. В соответствии с подходом с разбиением на интервалы, заранее выбранное количество интервалов (n) и заданный интервал времени (ΔT) определяют размер интервала (τ) в соответствии со следующим уравнением:
 (Ур.1)
(Ур.1)
В качестве примера, 24 интервала времени пролета (n=24) с интервалом времени совпадения в 6 наносекунд (ΔT=6 нс) задают размер времяпролетного интервала в 250 пикосекунд (τ=ΔT/n=250 пс). В соответствии с такими схемами разбиения на интервалы, при размывании посредством времяпролетного ядра нужно использовать выборочную версию времяпролетного ядра.
Настоящее изобретение предоставляет непрерывное времяпролетное SSS вместо поделенного на интервалы времяпролетного SSS и связанный способ корректировки данных времяпролетной визуализации PET, чтобы компенсировать рассеяние фотонов. В результате непосредственного использования времяпролетной информации без дополнительной обработки, необходимой для подхода с разбиением на интервалы, настоящий способ дает лучшую оценку рассеяния и повышает качество изображений PET в онкологии, кардиологии, неврологии и других применениях визуализации. Кроме того, он размывает оценку рассеяния или излучения с использованием непрерывного ядра размывания времени пролета, предпочтительно функции Гаусса, вместо выборочных версий. Дополнительные выгоды и преимущества легко поймет обычный специалист из нижеследующего описания.
Таким образом, в одной особенности предоставляется способ корректировки данных времяпролетной визуализации PET, полученных детекторами фотонов в томографе PET, чтобы учитывать рассеяние фотонов, где поле зрения томографа PET делится на базисные функции, и выявляется одна или несколько точек рассеяния, чтобы применить имитационную модель рассеяния, причем способ содержит: задание, для каждой точки рассеяния фотона, траектории рассеяния, соединяющей точку рассеяния фотона по меньшей мере с одной парой детекторов фотонов, вычисление вклада рассеяния в данные визуализации PET, записанные по меньшей мере одной парой детекторов фотонов, от каждой базисной функции в наборе базисных функций, расположенных по траектории рассеяния, так что вклад рассеяния от любой базисной функции вычисляется независимо от вклада рассеяния от других базисных функций. Также предоставляется имеющая отношение к этому визуализации PET.
Фиг.1A и 1B соответственно иллюстрируют истинное совпадение и рассеянное совпадение в типовой системе 100 PET;
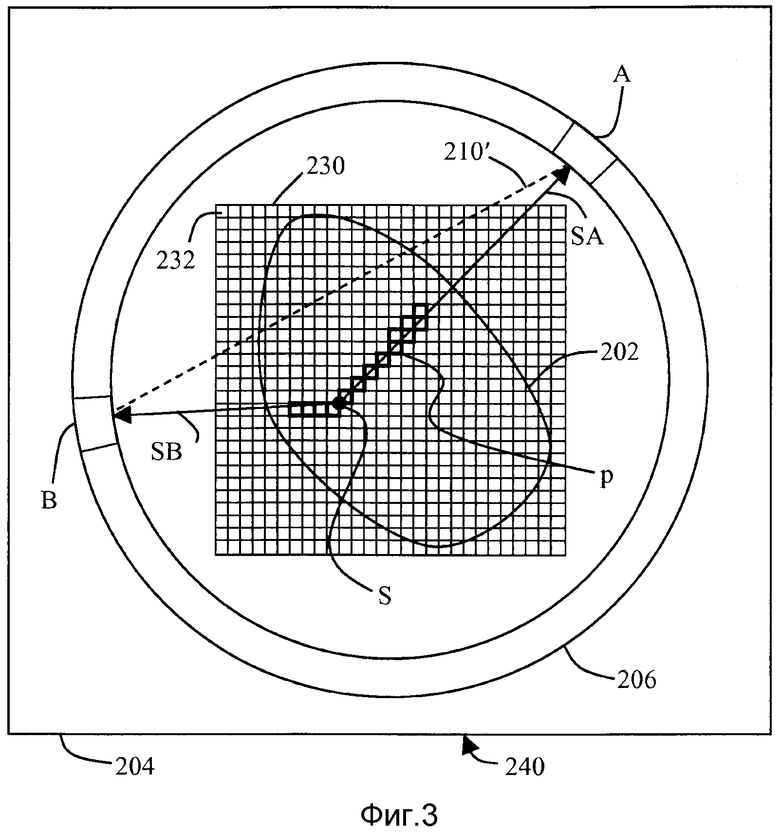
Фиг.2 иллюстрирует систему 200 PET с мозаичным полем 230 зрения; и
Фиг.3 иллюстрирует применение методики разбиения на окна, примененной в системе 200 PET.
Один пример устройства 200 формирования изображений PET для выполнения сканирования PET показан на Фиг.2. Система 240 получения изображений PET включает в себя раму 204, которая принимает в окно пациента или другой объект 202, который нужно изобразить. Рама 204 содержит несколько детекторов фотонов, расположенных в кольце 206 вокруг пациента 202, чтобы обнаруживать совпадающие фотонные пары, излученные в результате аннигиляций позитронно-электронной пары. Два таких детектора A и B показаны на Фиг.2. В фактической системе 200 PET кольцо 206 детекторов обычно будет содержать несколько детекторов, а также может быть много колец детекторов, установленных вместе.
Система 240 приобретения изображений PET передает данные визуализации PET, записанные кольцом 206 детекторов, например, A и B, в систему 250 отображения, обработки и формирования изображений PET по линии 245 связи. Хотя с целью иллюстрации системы 240 и 250 показаны и описаны здесь как отдельные системы, в других вариантах осуществления они могут быть частью единой системы. Данные визуализации PET поступают в процессор 252 изображений, который сохраняет данные в запоминающем устройстве 254. Процессор 252 изображений обрабатывает данные визуализации PET в электронном виде, чтобы сгенерировать изображения изображаемого пациента или другого объекта 202. Процессор 252 изображений может показать результирующие изображения на ассоциированном дисплее 256. Пользовательское устройство 258 ввода, например клавиатура и/или мышь, может быть предоставлено пользователю для управления процессором 252.
Вышеупомянутые функции и описанные ниже процессы могут выполняться в виде программной логики. "Логика" при использовании в данном документе включает в себя, но не ограничивается, аппаратные средства, микропрограммное обеспечение, программное обеспечение и/или сочетания каждого для выполнения функции (функций) или действия (действий) и/или вызова функции или действия из другого компонента. Например, на основе нужного применения или потребностей логика может включать в себя программно-управляемый микропроцессор, дискретную логику, например специализированную интегральную схему (ASIC), или другое устройство с программируемой логикой. Логика также может быть полностью реализована в виде программного обеспечения.
"Программное обеспечение" при использовании в данном документе включает в себя, но не ограничивается, одну или несколько машиночитаемых и/или исполняемых команд, которые побуждают компьютер или другое электронное устройство выполнять функции, действия и/или реагировать нужным образом. Команды могут быть воплощены в различных формах, таких как процедуры, алгоритмы, модули или программы, включающие отдельные приложения или код из динамически подключаемых библиотек. Программное обеспечение также может быть реализовано в различных видах, таких как автономная программа, вызов функции, сервлет, апплет, сохраненные в запоминающем устройстве команды, например в запоминающем устройстве 254, часть операционной системы или другой тип исполняемых команд. Обычный специалист в данной области техники примет во внимание, что вид программного обеспечения зависит, например, от требований нужного приложения, среды, в которой оно выполняется, и/или пожеланий проектировщика/программиста или т.п.
Системы и способы, описанные в этом документе, могут быть реализованы на ряде платформ, включая, например, сетевые системы управления и автономные системы управления. Более того, показанная и описанная в этом документе логика предпочтительно находится на машиночитаемом носителе, например запоминающем устройстве 254. Примеры разных машиночитаемых носителей включают в себя флэш-память, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), программируемое постоянное запоминающее устройство (PROM), электрически программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), магнитный диск или ленту, оптически читаемые носители, включая CD-ROM и DVD-ROM, и другие. Более того, описанные в этом документе процессы и логику можно соединить в одну большую последовательность операций или разделить на много последовательностей подпроцессов. Порядок, в котором последовательности операций описаны в этом документе, не является важным и может быть перестроен, добиваясь при этом таких же результатов. Конечно, описанные в этом документе последовательности операций можно перестроить, объединить и/или реорганизовывать при их реализации, как оправдано или нужно.
Поле 230 зрения системы 240 приобретения изображений PET делится на несколько пикселей 232, используемых для целей восстановления, чтобы сгенерировать изображение объекта 202, например человека. В более общем смысле поле 230 зрения можно представить совокупностью базисных функций, причем каждая представляет пространственное распределение. Таким образом, такие базисные функции могут быть представлены двумерными пикселями, например, показанными на Фиг.2, или соответствующими трехмерными вокселями, или последовательностью функций Гаусса, соответствующих пространственным распределениям, и т.п. Хотя это подробное описание обращает внимание на использование двумерных пикселей, настоящее изобретение в своем самом широком виде не ограничивается подобным образом. Пиксель является лишь одним типом базисной функции, взятым в этом документе в качестве показательного примера с целью иллюстрации.
Чтобы реализовать алгоритм SSS, одна или несколько возможных точек рассеяния S выбираются и распределяются для охвата по меньшей мере размера сканируемого объекта 202. Одна такая точка рассеяния S показана на Фиг.2. Увеличение количества выбранных точек рассеяния S увеличит точность алгоритма SSS, но также увеличит вычислительный ресурс, необходимый для выполнения алгоритма SSS. Карта затухания может использоваться, чтобы помочь динамически определить точки рассеяния S, например, путем увеличения плотности точек рассеяния S в областях с сильным затуханием. Обычный специалист сможет выбрать подходящее количество точек рассеяния S, чтобы уравновесить эти конкурирующие соображения в заданном применении алгоритма SSS.
Два хода луча, направляющиеся из точки рассеяния S на Фиг.2 в каждый из двух совпадающих детекторов A и B, соответственно идентифицируются как SA и SB. Таким образом, аннигиляция позитронно-электронной пары, возникающая где-то на траектории рассеяния ASB, приводит к наблюдаемому совпадению между двумя детекторами A и B с наблюдаемой линией 210′ ответа. Как видно, два хода луча SA и SB пересекают сканируемый объект 202 в нескольких пикселях p в поле 230 зрения; эти пиксели p показаны на Фиг.2 жирными линиями. Каждый из пикселей p, пересекаемый ходами луча SA и SB, является источником некоторого уровня радиации или излучения E и имеет ассоциированное значение времени пролета, соответствующее траектории рассеяния ASB.
В одном варианте осуществления, который проиллюстрирован на Фиг.3, некоторые из пикселей излучения p на траектории рассеяния ASB могут быть выделены на основе критериев разбиения на окна времени пролета. Такое разбиение на окна данных времяпролетной PET дополнительно обсуждается в заявке на патент США 12/159795, зарегистрированной 1 июля 2008 г. и опубликованной как US 2008/0296505, настоящим включенной в этот документ путем отсылки. В соответствии с этим вариантом осуществления, каждый пиксель излучения p по траектории рассеяния ASB, имеющий ассоциированное значение времени пролета, которое не находится в предопределенном окне времени пролета, не рассматривается при оценке SSS. Этот вариант осуществления может быть полезен в некоторых ситуациях для уменьшения вычислительной мощности и времени, необходимых для выполнения SSS. Окно времени пролета может выбираться, например, так, чтобы пиксели p имели время пролета TOFs,p в пределах окна совпадения. В другом варианте осуществления окно времени пролета может выбираться даже еще меньше, потому что большая часть интересующей интенсивности излучения будет поступать от пикселей p в определенной области изображаемого объекта 202. Интересующая область будет меняться на основе конкретного применения визуализации. Например, в онкологии областью конкретного интереса является область, окружающая опухоль, которая может быть относительно небольшой, например, порядка нескольких сантиметров.
Каждый пиксель p имеет ассоциированное значение времени пролета TOFS,p относительно траектории рассеяния ASB, заданной точкой рассеяния S и парой детекторов A, B. Каждый пиксель p также обладает интенсивностью излучения ES,p, которая измеряется томографом 200 PET. Набор этих пикселей p, соответствующих точке рассеяния S, и соответствующая траектория рассеяния ASB и пара детекторов A, B обозначается с помощью:
Как уже обсуждалось применительно к Фиг.3, этот набор PS может быть ограничен пикселями p в конкретном интервале времени.
Тогда вклад однократного рассеяния в интенсивность излучения, которая записана любой заданной парой детекторов A, B в кольце 206 из точки рассеяния S и пикселя p, если пиксель p лежит на ходе луча SA, равен:

где:
σAS - геометрическое поперечное сечение детектора A для фотонов, приближающихся по ходу луча SA;
σBS - геометрическое поперечное сечение детектора B для фотонов, приближающихся по ходу луча SB;
RAS - расстояние от S до A;
RBS - расстояние от S до B;
µC - линейный коэффициент затухания, имеющий отношение к комптоновским взаимодействиям;
σC - полное сечение Клейна-Нишины, имеющее отношение к комптоновским взаимодействиям;
dσC/dΩ - дифференциальное сечение Клейна-Нишины, имеющее отношение к комптоновским взаимодействиям;
 AS - эффективность детектора A для фотонов, приближающихся по ходу луча SA при энергии падающего фотона;
AS - эффективность детектора A для фотонов, приближающихся по ходу луча SA при энергии падающего фотона;
 ′BS - эффективность детектора B для фотонов, приближающихся по ходу луча SB при энергии рассеянного фотона;
′BS - эффективность детектора B для фотонов, приближающихся по ходу луча SB при энергии рассеянного фотона;
µ - линейные коэффициенты затухания при энергии падающего фотона;
µ′ - линейные коэффициенты затухания при энергии рассеянного фотона; и
s - переменная интегрирования, охватывающая прямую линию между пределами интегрирования.
Также вклад однократного рассеяния в интенсивность излучения, которая записана любой заданной парой детекторов A, B в кольце 206 из точки рассеяния S и пикселя p, если пиксель p лежит на ходе луча SB, равен:

где:
 BS - эффективность детектора B для фотонов, приближающихся по ходу луча SB при энергии падающего фотона; и
BS - эффективность детектора B для фотонов, приближающихся по ходу луча SB при энергии падающего фотона; и
′AS - эффективность детектора A для фотонов, приближающихся по ходу луча SA при энергии рассеянного фотона.
Таким образом, вклад однократного рассеяния на наблюдаемой линии 210′ ответа, соответствующей любой заданной паре детекторов A, B в кольце 206, равен:
Как видно из Уравнения 5, вклад однократного рассеяния рассматривается как совокупность отдельных вкладов интенсивности излучения от излучений различных пикселей 232. Для каждого сочетания одной точки рассеяния S и одного пикселя p имеется ассоциированное значение времени пролета TOFS,p, соответствующее заданной паре детекторов A, B. Таким образом, совокупность вкладов рассеяния, заданных в Уравнении 5, также можно описать в зависимости от тех значений времени пролета:

Эта совокупность вкладов рассеяния не делится на интервалы вдоль траектории рассеяния ASB. Наоборот, совокупность задает полный набор вкладов рассеяния для заданной пары детекторов A, B из всех точек рассеяния S и пикселей p в зависимости от значения времени пролета TOFs,p. В Уравнениях 5 и 6 отсутствует объединение пикселей p в совокупности или интервалы по траектории рассеяния ASB для использования общих значений в каждом интервале, чтобы аппроксимировать или упростить вычисления. Таким образом, вклад рассеяния от любого пикселя p вычисляется независимо от вклада рассеяния других пикселей p по итерационному процессу.
Совокупность, заданная Уравнениями 5 и 6, является негладким дискретным набором значений. В некоторых ситуациях она может быть полезна для приблизительной оценки дискретной совокупности, заданной Уравнениями 5 и 6 в виде гладкой функции, например, с помощью смягчения. Смягчители являются функциями, используемыми для создания последовательностей гладких функций, приближающих дискретизованные функции. Если имеется функция, которая является скорее нерегулярной, такой как дискретная совокупность, заданная Уравнением 5 или 6, то свертывание ее с помощью смягчителя сглаживает ее дискретизованную сущность, оставляя по-прежнему близкой к исходному дискретному распределению.
Таким образом, совокупность Уравнений 5 и 6 может быть приблизительно выражена смягчающей функцией:

Значение, заданное в качестве SSS(TOF) в Уравнении 7, представляет предполагаемый вклад рассеяния в сигнал формирования изображения, записанный системой 200 PET для времени пролета TOF, соответствующего двум детекторам A, B. SSSS,p или SSS(TOFS,p) является совокупностью, заданной выше в Уравнениях 5 и 6. Функция
является ядром размывания времени пролета, центрированным в TOFS,p.
Таким образом, для каждой линии 210′ ответа и каждого значения времени пролета TOF на линии 210′ ответа значение SSS(TOF) может вводиться в процесс времяпролетного восстановления изображений, чтобы сформировать изображение PET со скорректированным рассеянием. На практике для каждой наблюдаемой линии 210′ ответа между двумя детекторами A и B в кольце 206 томограф 200 PET сохраняет в запоминающем устройстве несколько численных величин:

Затем во время восстановления изображений величина SSS(TOF) в Уравнении 7 оценивается в каждом значении TOF вдоль каждой линии 210′ ответа с использованием тех величин. Выражение Уравнения 7 является математическим представлением непрерывной оценки моделирования однократного рассеяния.
Суммирование Уравнения 7 можно вычислить с использованием любого способа, известного в данной области техники. В одном таком варианте осуществления выражение Уравнения 7 может использоваться само по себе, чтобы моделировать рассеянные фотоны в восстановлении PET. Таким образом, может использоваться, например, реализация быстрого преобразования Гаусса, разработанная в статье Leslie Greengard и John Strain, "The Fast Gauss Transform", SIAM J. Sci. Stat. Comput., том 12, № 1, стр. 79-94, январь 1991 г., настоящим включенной в этот документ путем отсылки.
В другом варианте осуществления выражение Уравнения 7 можно разделить на две отдельных суммы, чтобы помочь в численных расчетах. Например, Уравнение 7 можно разделить на первую сумму по точкам рассеяния S и вторую сумму по пикселям p, принадлежащим PS:

Тогда список всех возможных значений TOF на траектории рассеяния ASB можно разделить на n подмножеств:
Таким образом, вклад рассеяния по траектории рассеяния ASB в значении времени пролета TOF может выражаться в виде:

Третье суммирование в Уравнении 11 ограничивается одним подмножеством разделения и допускает полиномиальную аппроксимацию, например, двух степеней, функции Гаусса G(TOF - TOFS,p):
Уравнение 13 представляет один пример, в котором моделирование однократного рассеяния сворачивается перед вычислением совокупного вклада рассеяния во всех точках рассеяния S. Уравнение 14 представляет альтернативный пример, в котором совокупные вклады рассеяния сначала вычисляются и затем сворачиваются.
На практике три момента распределения рассеяния в Уравнениях 13 и 14:
могут вычисляться заранее и сохраняться в запоминающем устройстве. Затем они используются при применении Уравнения 13 или 14 для определения непрерывного предполагаемого вклада однократного рассеяния SSS(TOF) в сигнал визуализации, записанный системой 200 PET для времени пролета TOF по линии 210′ ответа. Значение SSS(TOF) в Уравнении 13 или 14 можно просто ввести в процесс времяпролетного восстановления изображений для многократного генерирования сигнала визуализации со скорректированным рассеянием. Таким образом, численные расчеты, поддерживающие использование Уравнения 13 или 14, можно выполнять эффективнее и поэтому быстрее для реализации с использованием компьютерного процессора.
В дополнительном альтернативном варианте осуществления непрерывная оценка Уравнения 7 или конкретная числовая реализация Уравнения 7, изложенная в Уравнениях 13 или 14, может объединяться с традиционным алгоритмом разбиения на интервалы.
Способы в этом раскрытии изобретения могут применяться к любому устройству обнаружения позитронного излучения, в частности к любому времяпролетному позитронно-эмиссионному томографу (PET) или сканеру с двойной модальностью, содержащему томограф PET. Способы обычно объединяются с алгоритмами восстановления, используемыми для генерирования изображений из списка обнаруженных событий совпадения между парами детекторов A, B.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. Очевидно, у некоторых после прочтения и осмысления предшествующего подробного описания возникнут модификации и изменения. Подразумевается, что изобретение должно толковаться как включающее в себя все такие модификации и изменения в той мере, в какой они входят в объем прилагаемой формулы изобретения либо ее эквивалентов. Изобретение может принимать форму различных компонентов и схем компонентов, и различных этапов и схем этапов. Чертежи предназначаются только для целей иллюстрации предпочтительных вариантов осуществления и не должны быть истолкованы как ограничивающие изобретение.
Изобретение относится к области визуализации и, в частности, к корректировке рассеяния фотонов во времяпролетных позитронно-эмиссионных томографах (PET). Сущность изобретения заключается в том, что способ корректировки данных времяпролетной визуализации PET, приобретенных детекторами фотонов в томографе (200) PET, чтобы учитывать рассеяние фотонов, где поле зрения (230) томографа (200) PET делится на базисные функции (232) и выявляется одна или несколько точек (S) рассеяния, чтобы применить имитационную модель рассеяния, причем способ содержит этапы, на которых задают, для каждой точки (S) рассеяния фотона, траекторию (ASB) рассеяния, соединяющую точку (S) рассеяния фотона по меньшей мере с одной парой детекторов (А, В) фотонов, и вычисляют вклад рассеяния в данные визуализации PET, записанные по меньшей мере одной парой детекторов (А, В) фотонов, от каждой базисной функции (232) в наборе (PS) базисных функций (р), расположенных вдоль траектории (ASB) рассеяния, и где вклад рассеяния от любой базисной функции (р) вычислен независимо от вклада рассеяния от других базисных функций (р). Технический результат - повышение качества изображения. 3 н. и 12 з.п. ф-лы, 3 ил.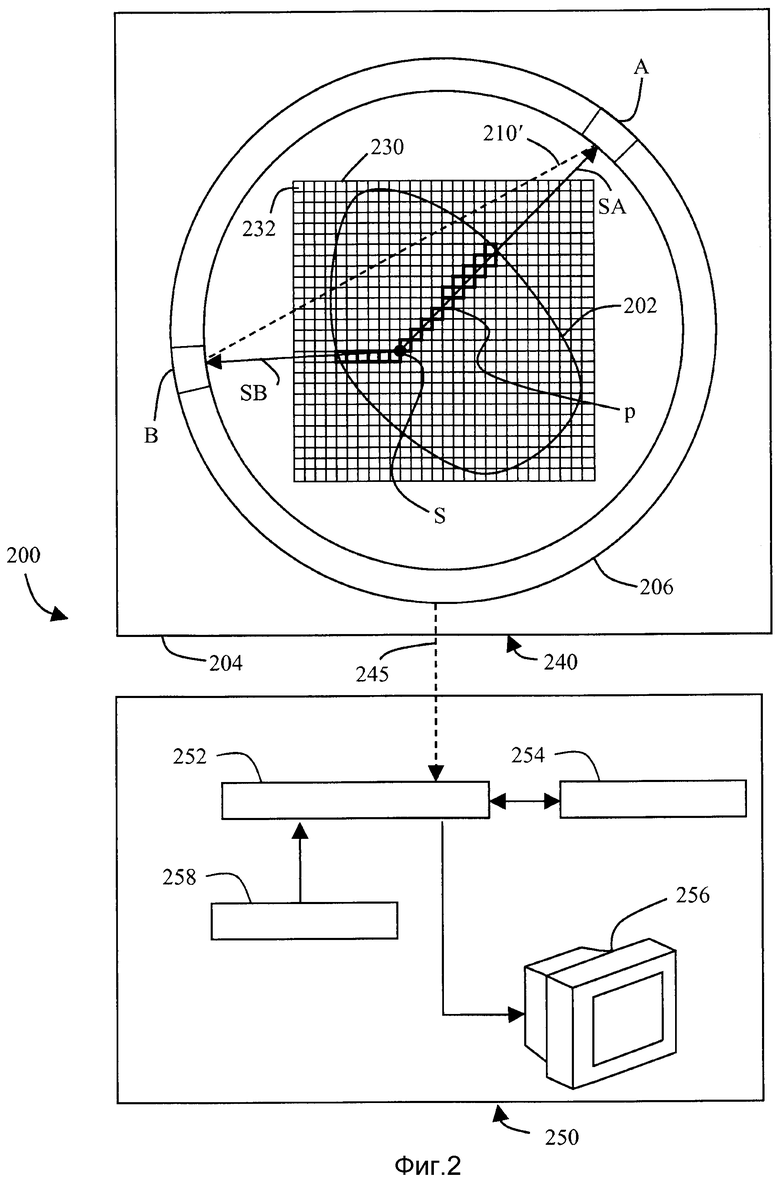
1. Способ корректировки данных времяпролетной визуализации PET, приобретенных детекторами фотонов в томографе (200) PET, чтобы учитывать рассеяние фотонов, где поле зрения (230) томографа (200) PET делится на базисные функции (232) и выявляется одна или несколько точек (S) рассеяния, чтобы применить имитационную модель рассеяния, причем способ содержит этапы, на которых:
задают, для каждой точки (S) рассеяния фотона, траекторию (ASB) рассеяния, соединяющую точку (S) рассеяния фотона по меньшей мере с одной парой детекторов (А, В) фотонов, и
вычисляют вклад рассеяния в данные визуализации PET, записанные по меньшей мере одной парой детекторов (А, В) фотонов, от каждой базисной функции (232) в наборе (PS) базисных функций (р), расположенных вдоль траектории (ASB) рассеяния, и где вклад рассеяния от любой базисной функции (р) вычислен независимо от вклада рассеяния от других базисных функций (р).
2. Способ по п.1, дополнительно содержащий этап, на котором для каждой точки (S) рассеяния фотона вычисляют вклад рассеяния от каждой базисной функции (р) в наборе (PS) в данные визуализации PET, записанные по меньшей мере каждой парой детекторов (А, В) фотонов, имеющей прямую линию ответа, соединяющую пару детекторов (А, В) фотонов, которая проходит через изображаемый объект (202).
3. Способ по п.1 или 2, в котором набор (PS) базисных функций (р) соответствует окну времени пролета, где базисные функции (р) имеют время пролета (TOFS,p) в пределах окна совпадения у томографа (200) PET.
4. Способ по пп.1-2, в котором имитационная модель рассеяния является моделированием однократного рассеяния.
5. Способ по пп.1-2, в котором вклады рассеяния от каждой базисной функции (р) в наборе (PS), соответствующем одной паре детекторов (А, В) фотонов, смягчены для генерирования непрерывной функции, аппроксимирующей вклады рассеяния базисных функций (р) в наборе (PS) к данным визуализации, записанным одной парой детекторов (А, В) фотонов (А, В).
6. Способ по п.5, в котором смягчение выполняется путем свертывания вкладов рассеяния от каждой базисной функции (р) в наборе (PS) с непрерывной функцией ядра размытости.
7. Способ по п.6, в котором дополнительно аппроксимируют непрерывную функцию ядра размытости разложением полинома.
8. Способ по п.5, в котором дополнительно объединяют непрерывную функцию, аппроксимирующей вклады рассеяния базисных функций (р) в наборе (PS), с алгоритмом разбиения на интервалы.
9. Система (200) визуализации PET, которая корректирует данные времяпролетной визуализации PET, приобретенные детекторами фотонов в системе (200) визуализации PET, чтобы учитывать рассеяние фотонов, где поле зрения (230) системы (200) визуализации PET делится на базисные функции (232) и выявляется одна или несколько точек (S) рассеяния, чтобы применить имитационную модель рассеяния, причем система содержит:
машиночитаемый носитель (252), сконфигурированный чтобы принимать данные времяпролетной визуализации PET, приобретенных детекторами фотонов, причем машиночитаемый носитель (252) содержит логику для:
определения для каждой точки (S) рассеяния фотона траектории (ASB) рассеяния, соединяющей точку (S) рассеяния фотона по меньшей мере с одной парой детекторов (А, В) фотонов, и
вычисления вклада рассеяния в данные визуализации PET, записанные по меньшей мере одной парой детекторов (А, В) фотонов, от каждой базисной функции (232) в наборе (Ps) базисных функций (р), расположенных вдоль траектории (ASB) рассеяния, где вклад рассеяния от любой базисной функции (р) вычислен независимо от вклада рассеяния от других базисных функций (р).
10. Система по п.9, в которой машиночитаемый носитель (252) дополнительно содержит логику для вычисления, для каждой точки рассеяния фотона (S), вклада рассеяния от каждой базисной функции (р) в наборе (PS) в данные визуализации PET, записанные по меньшей мере каждой парой детекторов (А, В) фотонов, имеющей прямую линию ответа, соединяющую пару детекторов (А, В) фотонов, которая проходит через изображаемый объект (202).
11. Система по п.9 или 10, в которой набор (PS) базисных функций (р) соответствует окну времени пролета, где базисные функции (р) имеют время пролета (TOFS,p) в пределах окна совпадения системы (200) визуализации PET.
12. Система по любому из пп.9-10, в которой имитационная модель рассеяния является моделированием однократного рассеяния.
13. Система по любому из пп.9-10, в которой машиночитаемый носитель (252) дополнительно содержит логику, чтобы смягчить вклады рассеяния от каждой базисной функции (р) в наборе (PS), соответствующем одной паре детекторов (А, В) фотонов, и генерирования непрерывной функции, аппроксимирующей вклады рассеяния базисных функций (р) в наборе (PS) к данным визуализации, записанным одной парой детекторов (А, В) фотонов.
14. Система по п.13, в которой смягчение выполняется путем свертывания вкладов рассеяния от каждой базисной функции (р) в наборе (PS) с непрерывной функцией ядра размытости.
15. Способ корректировки данных времяпролетной визуализации PET, приобретенных детекторами фотонов в томографе (200) PET, чтобы учитывать рассеяние фотонов, где поле зрения (230) томографа (200) PET разделено на базисные функции (232) и выявляется одна или несколько точек (S) рассеяния, чтобы применить имитационную модель рассеяния, причем способ содержит этапы, на которых:
определяют, для каждой точки (S) рассеяния фотона, траекторию (ASB) рассеяния, соединяющую точку (S) рассеяния фотона по меньшей мере с одной парой детекторов (А, В) фотонов, и
вычисляют вклад рассеяния в данные визуализации PET, записанные по меньшей мере одной парой детекторов (А, В) фотонов, от каждой базисной функции (232) в наборе (PS) базисных функций (р), расположенных вдоль траектории (ABS) рассеяния, смягчают вклады рассеяния от каждой базисной функции (р) в наборе (PS), соответствующем одной паре детекторов (А, В) фотонов, чтобы сгенерировать непрерывную функцию, аппроксимирующую рассеяния базисных функций (р) в наборе (PS) в данные визуализации, записанные одной парой детекторов (А, В) фотонов, где смягчение выполнено путем свертывания вкладов рассеяния от каждой базисной функции (р) в наборе (PS) с непрерывной функцией ядра размытости.
| US 7397035 B2, 08.07.2008 | |||
| US 2009057561 A1, 05.03.2009; | |||
| US 6631284 B2, 07.10.2003; | |||
| RU 2007110488 A, 10.11.2008 |

