ОБЛАСТЬ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к рабочей машине или лесной машине, в частности к смоделированной на компьютере машине в искусственной среде.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Развитие лесных машин позволило существенно повысить производительность в заботе о лесе и заготовке леса. Современные лесные машины в состоянии работать точно и с высокой скоростью, и выход продукции таких машин уже известен с помощью измерений во время работы. Машинное оборудование в этих сложных устройствах имеет много инновационных решений, которые повышают безопасность и производительность таких машин.
Управление современной лесной машиной является сложной задачей, которая требует высоких профессиональных навыков. Изучение управления машиной включает как теоретическое, так и практическое обучение. Теоретическое обучение включает в себя, например, изучение использования правильных принципов в работе и понимании цели каждой фазы в работе. Практическое обучение включает изучение управления физическими средствами управления лесной машины, обычно посредством управления машиной в реальных условиях.
Недавно стало возможным использовать на практике управление лесной машиной посредством использования тренажера. На самом усовершенствованном тренажере, таком как тренажеры, доступные для лесных машин John Deere(R), физические средства управления являются теми же или, по меньшей мере, очень схожими с таковыми в реальной лесной машине. Операции машины моделируются посредством компьютера и могут в значительной степени иметь сходство с реальной машиной. К сожалению, несмотря на хорошее моделирование самой машины, созданная на компьютере среда не может полностью соответствовать реальной среде в лесу. Например, перспектива среды на экране компьютера может быть более трудной для понимания, и воображение и навыки пространственного абстрагирования могут быть необходимы, чтобы видеть позицию и работу машины относительно смоделированной среды. Эта проблема частично создается посредством ограниченного средства отображения в сравнении с реальным видом, но также и посредством других факторов.
Поэтому существует потребность в разработке, которая поможет человеку узнать, как управлять лесной машиной в смоделированной среде.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящее время был изобретен улучшенный способ и техническое оборудование, реализующее этот способ, посредством которого уменьшаются вышеупомянутые проблемы. Различные аспекты изобретения включают в себя способ, устройство, сервер, клиент и считываемый компьютером носитель, содержащий компьютерную программу, сохраненную на нем, которые характеризуются тем, что заявлено в независимой формуле изобретения. Различные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения.
Тренажер (эмулятор) лесной машины, согласно различным вариантам осуществления изобретения, стремится помочь пользователю тренажера посредством добавления зрительной информации к смоделированной среде. Тренажер может, например, добавить сетку, указывающую рабочую область смоделированной лесной машины таким образом, чтобы пользователь мог видеть подходящую рабочую область на ландшафте. Сетка или другой индикатор может иметь форму, которая изображает область действия лесной машины, например конус или прямоугольник, и может быть прикреплена к лесной машине таким образом, чтобы она была в состоянии перемещаться с машиной в смоделированной среде. Сетка может быть скомпонована, чтобы быть показанной в верхней части земных или наземных объектов среды посредством компоновок в устройствах компьютерной графики. Компоновка, согласно изобретению, может помочь пользователю изучить подходящие способы работы, например управлять лесной машиной таким образом, чтобы рабочая область находилась сбоку машины, если такое управление предусматривает лучшую область действия и устойчивость.
Согласно первому аспекту, обеспечивается способ для отображения рабочей области стрелы, шарнирно смонтированной на рабочей машине, в устройстве для управления стрелой и/или рабочей машиной, причем способ содержит электронное определение размера по меньшей мере части рабочей области рабочей машины и электронную индикацию рабочей области рабочей машины таким образом, чтобы индикация рабочей области была по меньшей мере частично видна в верхней части участка местности, примыкающего к рабочей машине.
Согласно варианту осуществления, устройством для управления лесной машиной является тренажер рабочей машины или лесной машины, и способ дополнительно содержит моделирование рабочей машины или лесной машины посредством компьютера таким образом, чтобы по меньшей мере одна часть лесной машины была смоделированной компьютером частью, и отображение перемещения смоделированной компьютером части рабочей машины или лесной машины для пользователя устройства. Согласно варианту осуществления, способ дополнительно содержит электронное моделирование участка местности вокруг машины с формой участка местности, и электронную индикацию рабочей области лесной машины в верхней части формы участка местности, и электронную индикацию рабочей области с помощью текстуры. Согласно варианту осуществления, способ дополнительно содержит выравнивание ориентации индикации рабочей области по одной из: ориентации всей машины, ориентации части машины, ориентации кабины или по ориентации рабочего средства машины, такого как шарнир стрелы. Согласно варианту осуществления, способ дополнительно содержит определение информации о задаче лесного хозяйства, выполняемой пользователем, и электронную индикацию рабочей области лесной машины на основании упомянутой информации о задаче лесного хозяйства. Согласно варианту осуществления, индикация рабочей области содержит по меньшей мере одно из группы: индикатор пути перемещения машины, индикатор самой близкой области действия средства работы или стрелы, индикатор самой дальней области действия средства работы или стрелы, индикатор положительной рабочей области, индикатор отрицательной рабочей области, индикатор рабочего конуса и индикатор рабочего квадрата, и индикатор асимметричной рабочей области на основании положения и позиции рабочей машины. Согласно варианту осуществления, средства управления сконфигурированы для использования смоделированной машиной или реальной машиной. Согласно варианту осуществления, рабочая машина является реальной рабочей машиной, такой как лесотехническая машина или погрузочная машина, имеющая механическую стрелу. Согласно варианту осуществления, способ дополнительно содержит индикацию рабочей области, используя головной дисплей.
Согласно второму аспекту, обеспечивается устройство, содержащее процессор, память, включающую в себя компьютерный программный код, память и компьютерный программный код, сконфигурированные посредством процессора для того, чтобы вынуждать устройство электронно определять размер по меньшей мере части рабочей области стрелы, шарнирно смонтированной на рабочей машине или лесной машине, и электронно указывать рабочую область машины таким образом, чтобы индикация рабочей области была по меньшей мере частично видна в верхней части участка местности, примыкающего к машине.
Согласно варианту осуществления, устройство дополнительно содержит компьютерный программный код, сконфигурированный для того, чтобы посредством процессора вынуждать устройство моделировать лесную машину посредством компьютера таким образом, чтобы по меньшей мере одна часть лесной машины была смоделированной компьютером частью, и отображать перемещение смоделированной компьютером части лесной машины для пользователя устройства. Согласно варианту осуществления, устройство дополнительно содержит компьютерный программный код, сконфигурированный для того, чтобы посредством процессора вынуждать устройство электронно воспроизводить участок местности вокруг машины с формой участка местности, и электронно указывать рабочую область лесной или рабочей машины в верхней части формы участка местности, и электронно указывать рабочую область с помощью текстуры. Согласно варианту осуществления, устройство дополнительно содержит компьютерный программный код, сконфигурированный для того, чтобы посредством процессора вынуждать устройство выравнивать ориентацию индикации рабочей области по одной из: ориентации всей машины, ориентации части машины, ориентации кабины или по ориентации рабочего средства, такого как шарнир стрелы. Согласно варианту осуществления, устройство дополнительно содержит компьютерный программный код, сконфигурированный для того, чтобы посредством процессора вынуждать устройство определять информацию о задаче лесного хозяйства, выполняемой пользователем, и электронно указывать рабочую область лесной машины на основании указанной информации о задаче лесного хозяйства. Согласно варианту осуществления, индикация рабочей области содержит по меньшей мере одно из группы: индикатор пути перемещения машины, индикатор самой близкой области действия средства работы, индикатор самой дальней области действия средства работы, индикатор положительной рабочей области, индикатор отрицательной рабочей области, индикатор рабочего конуса и индикатор рабочего квадрата, и индикатор асимметричной рабочей области на основании положения и позиции рабочей машины. Согласно варианту осуществления, средства управления сконфигурированы для использования смоделированной машиной или реальной машиной. Согласно варианту осуществления, рабочая машина является реальной рабочей машиной, такой как лесотехническая машина или погрузочная машина, имеющая механическую стрелу. Согласно варианту осуществления, устройство дополнительно содержит головной дисплей для индикации рабочей области.
Согласно третьему аспекту, обеспечивается устройство, содержащее процессор, память, включающую в себя компьютерный программный код, память и компьютерный программный код, сконфигурированные для того, чтобы посредством процессора вынуждать устройство выполнять способ, который описан в первом аспекте. Согласно варианту осуществления, рабочая машина является реальной рабочей машиной, такой как лесотехническая машина или погрузочная машина, имеющая механическую стрелу. Согласно варианту осуществления, устройство дополнительно содержит головной дисплей для индикации рабочей области.
Согласно четвертому аспекту, обеспечивается компьютерный программный продукт, сохраненный на считываемом компьютере носителе и выполняемый в устройстве обработки данных, в котором компьютерный программный продукт содержит секцию компьютерного программного кода для определения размера по меньшей мере части рабочей области стрелы, шарнирно смонтированной на рабочей или лесной машине, и секцию компьютерного программного кода для индикации рабочей области машины таким образом, чтобы индикация рабочей области была по меньшей мере частично видна в верхней части участка местности, примыкающего к машине.
Согласно пятому аспекту, обеспечивается компьютерный программный продукт, сохраненный на считываемом компьютере носителе и выполняемый в устройстве обработки данных, в котором компьютерный программный продукт содержит секции компьютерного программного кода для выполнения способа, который описан в первом аспекте.
Согласно пятому аспекту, обеспечивается устройство, содержащее средство управления лесной машиной или стрелой, шарнирно смонтированной на рабочей машине или лесной машине, для приема ввода управления от пользователя и формирования сигналов управления для управления устройством, средство для обработки упомянутых сигналов управления от блока управления, средство для определения размера по меньшей мере части рабочей области лесной или рабочей машины, и средство для индикации рабочей области машины таким образом, чтобы индикация рабочей области была по меньшей мере частично видна в верхней части участка местности, примыкающего к лесной машине. Согласно варианту осуществления, устройство дополнительно содержит средство для моделирования машины посредством компьютера таким образом, чтобы по меньшей мере одна часть машины была смоделированной компьютером частью, и средство для отображения перемещения смоделированной компьютером части лесной машины для пользователя устройства.
Согласно шестому аспекту, обеспечивается система, содержащая по меньшей мере первое устройство и второе устройство, согласно первому, второму и/или пятому аспектам, где первое устройство и второе устройство соединены с помощью соединения данных, и первое устройство и второе устройство сконфигурированы для того, чтобы показать информацию, указывающую операцию второго устройства в первом устройстве. Согласно варианту осуществления, первое устройство сконфигурировано для отображения графической формы второго устройства в виртуальной окружении первого устройства.
Согласно седьмому аспекту, обеспечивается система, содержащая по меньшей мере первое устройство и второе устройство согласно второму аспекту, в котором первое устройство и второе устройство соединены с помощью соединения данных, и первое устройство и второе устройство сконфигурированы для того, чтобы показать информацию, указывающую работу второго устройства в первом устройстве.
Согласно варианту осуществления, рабочая машина сконфигурирована для индикации рабочей области в ответ на управление стрелой, и удаления индикатора рабочей области, когда стрелой не управляют. Согласно варианту осуществления, рабочая машина дополнительно содержит головной дисплей для индикации рабочей области.
Согласно восьмому аспекту, обеспечивается рабочая машина, такая как лесотехническая машина, содержащая подвижную стрелу, дисплей, процессор, память, включающую в себя компьютерный программный код, память и компьютерный программный код, сконфигурированные посредством процессора для того, чтобы вынуждать рабочую машину электронно указывать рабочую область стрелы на дисплее. Согласно варианту осуществления, рабочая машина сконфигурирована для индикации рабочей области в ответ на управление стрелой, и удаления индикатора рабочей области, когда стрелой не управляют. Согласно варианту осуществления, рабочая машина содержит головной дисплей для индикации рабочей области.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
В нижеследующем описании различные варианты осуществления изобретения описаны более подробно с ссылками на прилагаемые чертежи, на которых
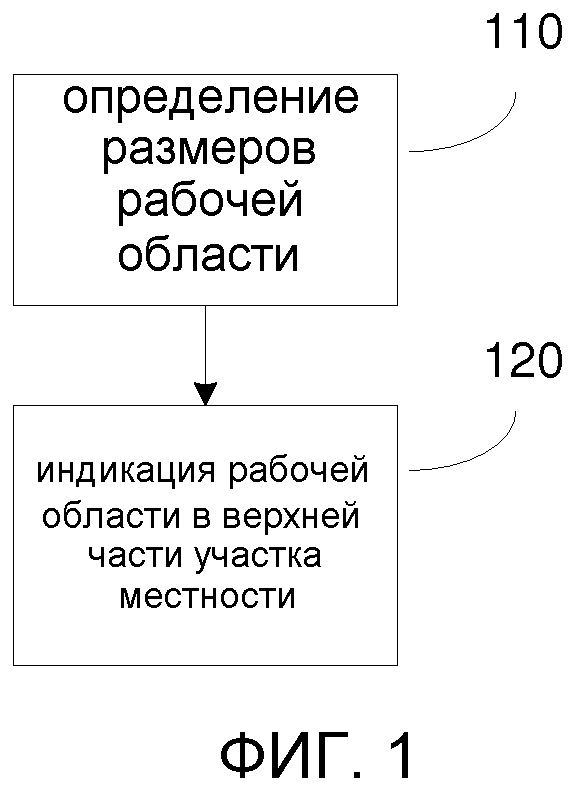
Фиг.1 показывает блок-схему работы лесной машины, согласно варианту осуществления изобретения;
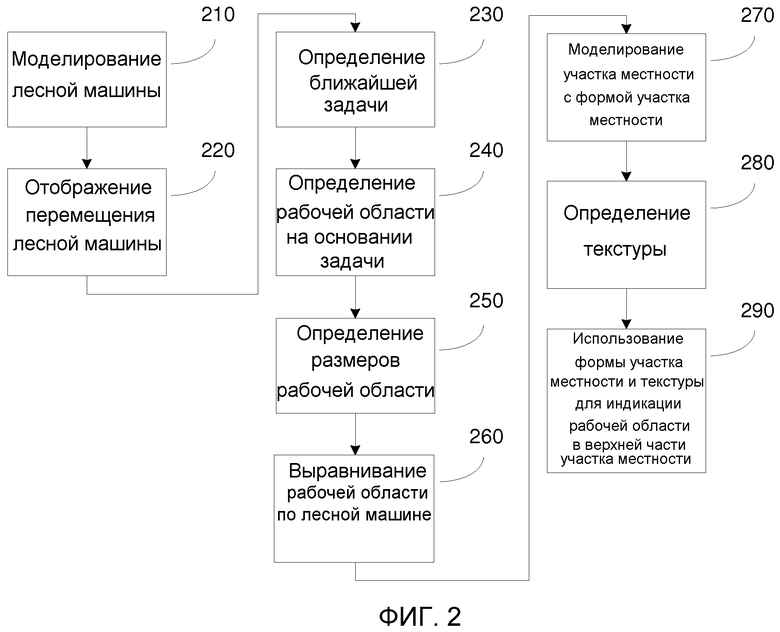
Фиг.2 показывает блок-схему работы лесной машины, согласно варианту осуществления изобретения;
Фиг.3a и 3b показывают тренажер (эмулятор) лесной машины, согласно варианту осуществления изобретения;
Фиг.4 показывает блок-схему тренажера лесной машины, согласно варианту осуществления изобретения;
Фиг.5 показывает смоделированный вид тренажера лесной машины, согласно варианту осуществления изобретения;
Фиг.6a и 6b показывают схематические представления различных индикаторов рабочей области для лесной машины, согласно варианту осуществления изобретения;
Фиг.7 показывает вид лесной машины в режиме обучения, согласно варианту осуществления изобретения;
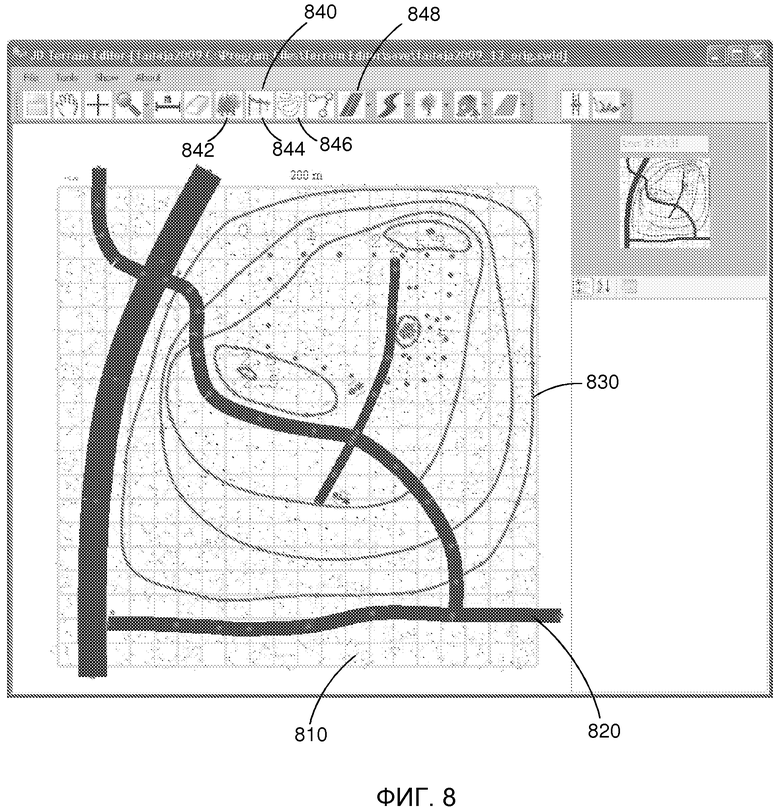
Фиг.8 показывает вид изменения смоделированного участка местности в лесной машине для режима обучения, согласно варианту осуществления изобретения; и
Фиг.9a и 9b показывают два типа лесных машин, чье управление может быть смоделировано на тренажере, согласно варианту осуществления изобретения.
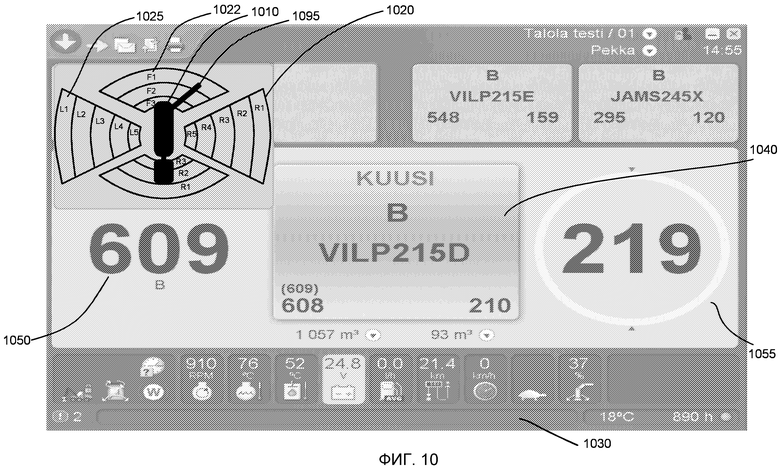
Фиг.10 показывает пример отображения рабочей области рабочей машины на дисплее в рабочей машине.
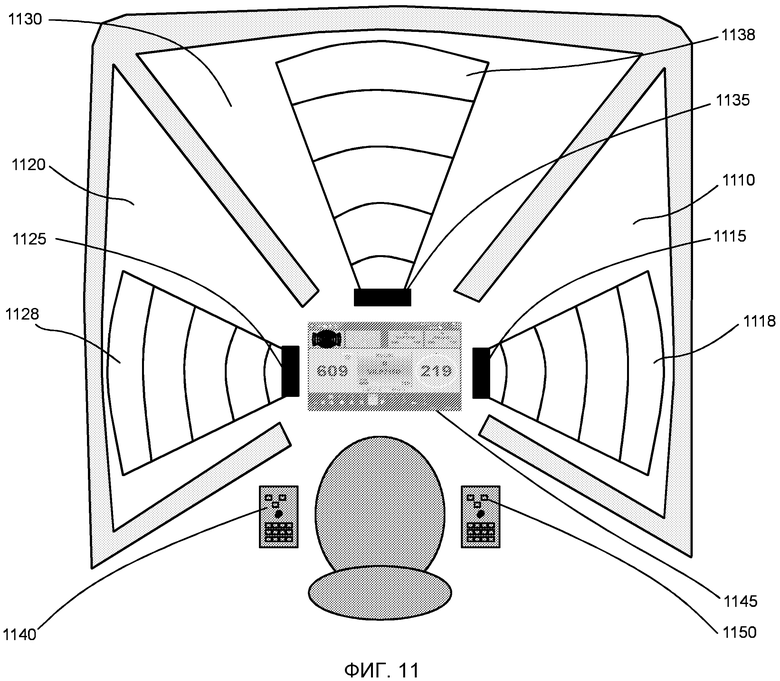
Фиг.11 показывает пример использования головного дисплея для индикации рабочей области рабочей машины в реальных условиях работы.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В нижеследующем описании несколько вариантов осуществления изобретения описаны в контексте лесной машины или, в целом, рабочей машины. Однако должно быть отмечено, что изобретение не ограничивается одними только лесными машинами. Фактически, различные варианты осуществления широко применяются в любой среде, где требуется индикация рабочей области машины. Например, различный тип машин, таких как подъемные краны, погрузочные машины, машины для сельского хозяйства и тому подобные, могут воспользоваться индикацией рабочей области согласно изобретению. Рабочая область особенно должна быть указана, когда рабочая машина или лесная машина имеет стрелу, которая может изменяться по длине или может иначе быть скомпонована, чтобы быть в состоянии вытягиваться на различные расстояния от рабочей машины. Стрела может быть скомпонована таким образом, чтобы был шарнир стрелы, вокруг которого может вращаться стрела.
Фиг.1 показывает блок-схему работы лесной машины, согласно варианту осуществления изобретения. Лесная машина обычно имеет стрелу или другой тип конструкции, чтобы приблизить головку пилы машины к дереву. Стрела может быть скомпонована для изменения длины при необходимости, например, включая две или более части, соединенные посредством шарнира. Это позволяет головке пилы, которая должна быть приближена близко к машине, заостряя угол в шарнире, находиться на большом расстоянии от машины, открывая угол. Поэтому стрела имеет определенный диапазон работы.
Различные способы работы могут также определять различные оптимальные способы работы со стрелой и головкой пилы. Например, может быть преимущественно и эффективно срубить деревья сбоку машины и не рубить деревья спереди. Деревья впереди будут приходить в оптимальный диапазон работы и оптимальное направление работы (сбоку машины), когда машина движется вперед. Поэтому способ работы может также определять оптимальную область работы. Индикаторы рабочей области могут помочь узнать, как корректно разместить машину относительно деревьев или срубить стволы, как будет объяснено более подробно ниже. Например, погрузочная машина может быть размещена соответственно сбоку штабеля срубленных стволов.
На Фиг.1 размеры (или по меньшей мере один размер) рабочей области сначала определяются на этапе 110. Может произойти так, что компьютер предварительно определил информацию о рабочей области в числовом формате, или имеет предварительно определенный шаблон рабочей области, сохраненный в его памяти. Когда размеры рабочей области известны, на этапе 120 рабочая область может быть указана в верхней части участка местности, окружающего лесную машину. Это может произойти, например, посредством проецирования графического шаблона, содержащего линии и формы, на участок местности посредством использования графических возможностей компьютера. Проецирование может иметь место в виртуальном мире компьютера или средство проецирования, такое как головной дисплей, может быть использовано в реальных условиях работы.
Фиг.2 показывает блок-схему работы лесной машины, согласно варианту осуществления изобретения. На этапе 210 лесная машина моделируется посредством компьютера. Моделирование может содержать механическое моделирование, операционное моделирование двигателя, средств управления, стрелы и головки пилы, и графическое моделирование. Это моделирование лесной машины действует как основа для отображения перемещения машины на этапе 220. Например, движение стрелы может повлиять на устойчивость машины, и попадающие в цель объекты могут вынуждать звуки формироваться.
На этапе 230 определяется задача, поставленная пользователю тренажера. Более конкретно, могут быть определены параметры для успеха и цели обучения задачи. Это определение может иметь место, например, посредством ввода пользовательского, или эти данные могут быть загружены из памяти компьютера. Как объяснено выше, на этапе 240 может быть определена рабочая область на основании ближайшей задачи, например на основании параметров конкретной задачи. Рабочая область также может быть определена, не используя информацию конкретной задачи, например, просто в зависимости от используемой лесной машины. Когда известна рабочая область, размеры рабочей области могут быть определены на этапе 250. Это может содержать, например, вычисление размера рабочей области или размера масштаба образца рабочей области. На этапе 260 рабочая область выравнивается с лесной машиной таким образом, чтобы рабочая область соответствовала ситуации в реальных условиях работы. Рабочая область может также зависеть от позиции, положения и/или наклона рабочей машины таким образом, чтобы рабочие области по разные стороны машины имели разный размер и/или форму. Например, рабочая область ниже машины сбоку холма может быть меньше, чем рабочая область выше машины. Это может быть сделано, например, чтобы повысить устойчивость машины.
Моделирование участка местности с формой участка местности на этапе 270 является одним примером того, как рабочая область может быть отображена на участке местности. Форма участка местности может быть, например, треугольной сеткой или другой формой, которая в состоянии находиться в верхней части участка местности в модели. Форма участка местности может регулироваться, чтобы находиться немного в верхней части участка местности таким образом, чтобы форма непрозрачного участка местности закрывала основной участок местности. На этапе 280 могут быть определены текстура или другой графический элемент, например, загружен из файла или генерирован посредством алгоритма. Эти текстура или графический элемент указывают рабочую область и могут содержать, например, форму конуса или прямоугольника, а также цветное или случайное заполнение. Текстура затем может быть отображена в форму участка местности для того, чтобы показать рабочую область. Это отображение может иметь место таким образом, чтобы точки текстуры были назначены на точки формы участка местности, и текстура распространялась на форму участка местности. Когда текстура отображается на этапе 290, получающимся в результате видом является то, что текстура, указывающая рабочую область, кажется плавающей или вытянутой в верхней части участка местности, а рабочая область выравнивается с позицией и положением лесной машины.
Фиг.3a и 3b показывают тренажер лесной или рабочей машины, согласно варианту осуществления изобретения. Тренажер используется для обучения человека способам управления и работы реальной лесной машины. Реальные лесные машины являются дорогими, и их управление должно осуществляться в подходящей среде, то есть в лесу. Обучение использованию этими дорогими машинами уменьшает их производительную работу при заготовке леса. Кроме того, условия в лесу часто могут быть тяжелыми и препятствовать изучению. Из-за требований безопасности только один ученик за один раз может быть проинструктирован на реальной лесной машине. По этим и другим причинам в целях обучения были построены тренажеры, такие как на Фиг.3.
Тренажер лесной машины содержит средства 310 и 312 управления, которыми может управлять пользователь. Эти средства управления имеют сходство с реальными средствами управления лесной машины, или они могут быть им идентичны. Аналогично, место 320 тренажера может быть реальным местом, используемым в лесной машине. Логика 330 тренажера построена, чтобы перемещаться с тренажером, например, относительно места. Дисплей 340 может быть обычным компьютерным дисплеем впереди пользователя. Тренажер был построен, чтобы быть подвижным, и он может содержать рычаги 350 и колеса 352 для перемещения.
Лесная машина, подобная таковой на Фиг.3a и 3b, может быть использована для того, чтобы обучить пользователя способам работы лесного хозяйства. В лесном хозяйстве существует много понятий, таких как место проведения работы и направление работы, которые могут быть трудными для понимания и визуализации на реальном участке местности. Кроме того, может быть легко забыта ближайшая задача, когда обучение происходит на реальной машине. На тренажере ситуация обучения и команды для задачи могут быть показаны студенту в качестве напоминания. Это является заметным усовершенствованием для обучения в реальных условиях работы, где задача часто дается устными и письменными командами. Кроме того, как показано на Фиг.3a и 3b, тренажер может дать самый реальный опыт изучения пользователю. Например, тренажер может содержать систему 360 зажигания, такую как система зажигания в реальной лесной машине, и он может содержать ручные средства 310 и 312 управления, а также ножные средства 370 управления (тормоз), которые очень походят или очень сильно схожи или являются такими же, как в реальной лесной машине.
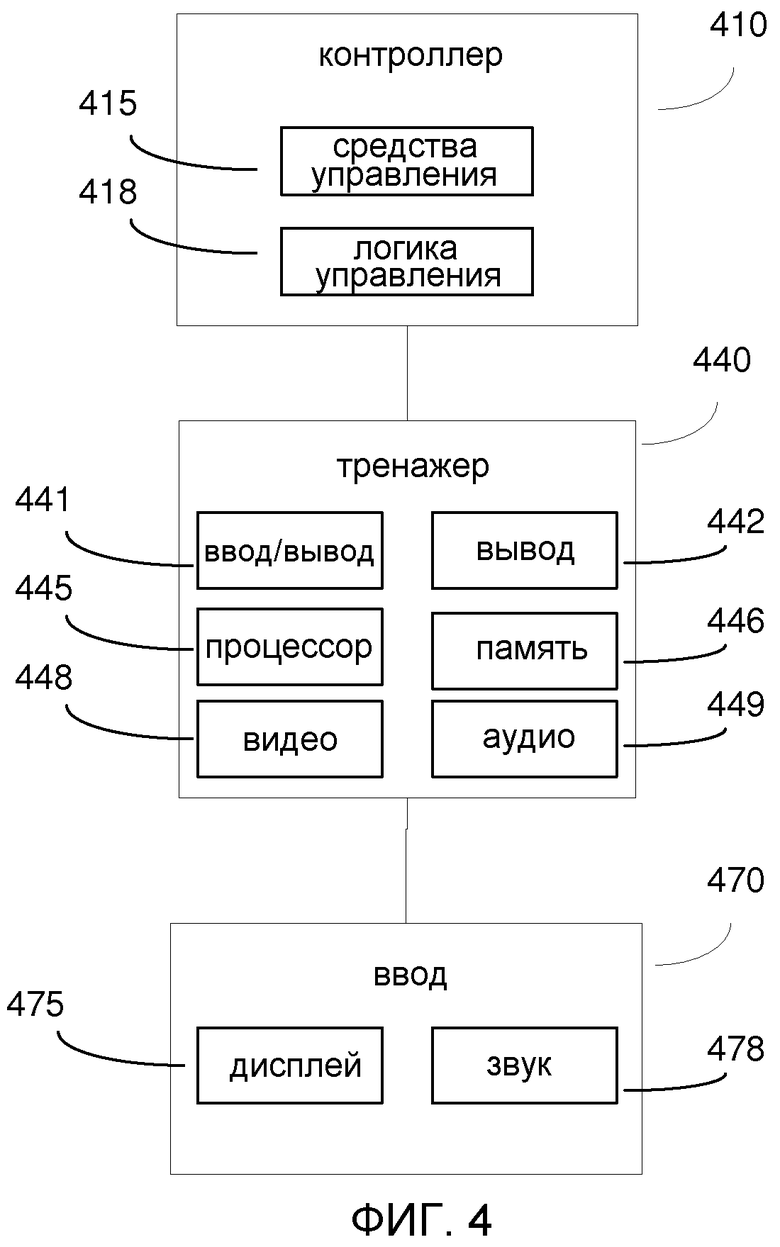
Фиг.4 показывает блок-схему тренажера лесной машины, согласно варианту осуществления изобретения. Контроллер 410 тренажера может содержать, например, средство 415 управления и некоторую логику 418 управления для создания сигналов управления в машине. Средства 415 управления могут быть аналогичны средствам управления реальной лесной машины, они могут быть упрощенной версией реальных средств управления, или, например, могут быть использованы обычные компьютерные средства управления. Логика управления может включать в себя схему и/или программное обеспечение на процессоре, таком как микроконтроллер, для генерирования сигналов, согласно средствам управления, управляемым пользователем. Интерфейс на тренажере 440 от контроллера 410 может быть таким же или очень схожим с интерфейсом между реальной лесной машиной и ее контроллером.
Тренажер 440 соединен с контроллером 410 с помощью линий сигнала. Для обработки сигналов на/от линий сигнала тренажер содержит схему 441 I/O (ввода/вывода). Тренажер может также содержать блок 442 ввода для приема ввода от пользователя, например, через клавиатуру и мышь. Тренажер содержит процессор 445 и память 446 для управления и хранения компьютерного программного кода для операций тренажера. Могут быть множественные процессоры, например процессор общего назначения и графический процессор, и/или множественные различные блоки памяти, например энергозависимая память для хранения данных и программ во время выполнения, и энергонезависимая память во время выполнения, такая как жесткий диск для постоянного хранения данных и программ. Тренажер может также включать в себя видеоконтроллер 448 и аудиоконтроллер 449 для генерирования сигналов, которые могут быть произведены пользователю с помощью компьютерных комплектующих.
Также могут быть множественные тренажеры, соединенные друг с другом по беспроводной или проводной сети (не показаны). В такой системе первый тренажер и второй тренажер могут быть соединены с помощью информационного соединения таким образом, чтобы второе устройство могло посылать информацию на первое устройство, и первое устройство могло показывать эту информацию пользователю или использовать ее при моделировании окружения. Например, рабочие характеристики второго устройства могут быть показаны в первом устройстве. Кроме того, второе устройство может появляться в качестве графической формы в виртуальном окружении первого устройства. Это может дать представление пользователю, что есть другая машина, работающая в той же области, и пользователь может видеть, что эта другая машина перемещается и работает. Такая система может быть также использована в целях обучения, где учитель или инструктор в состоянии следить за любой единственной машиной или множественными машинами, работающими в среде. Фактически, первая машина может быть лесозаготовительной машиной, и вторая машина может быть погрузочной машиной.
Тренажер производит вывод пользователю через средство 470 вывода. Видеоконтроллер 448 может быть соединен с дисплеем 475. Дисплей может быть, например, дисплеем с плоским экраном или проектором для формирования большего изображения. Дисплей может быть также приспособлен к носимым видеоочкам. Аудиоконтроллер 449 может быть соединен со звуковым источником 478, таким как громкоговорители или наушники.
Фиг.5 показывает смоделированный вид тренажера лесной машины, согласно варианту осуществления изобретения. В смоделированном виде есть различные смоделированные объекты, помещенные на участок местности 510, например деревья 512, которые являются целью лесной машины, и другие объекты, такие как скалы 514 и дороги 516. Участок местности может иметь формы, например, канавы, такие как таковые рядом с дорогой 516, и изменения возвышения, такие как холмы. Сама лесная машина может содержать две главные части 520 (задний корпус) и 522 (передний корпус) со стрелой 524, прикрепленной, например, к передней части и имеющей головку 526 пилы. Лесная машина может работать на колесах 528.
Индикаторы 530, 532 и 536 рабочей области спроектированы вокруг лесной машины. Индикаторы 530 и 532 рабочей области показывают оптимальные рабочие области сбоку машины, и индикатор 536 рабочей области показывает субоптимальную рабочую область впереди. Индикаторы рабочей области могут содержать элементы 540 и 542 для индикации самой дальней и самой близкой области действия стрелы соответственно. Путь перемещения лесной машины также может быть указан индикаторами рабочей области с отметками 544 пути для того, чтобы показать ширину нужного пути, когда лесная машина движется вперед.
Индикаторы рабочей области назначены или иначе перемещаются с машиной, то есть по меньшей мере в некоторой степени связаны с системой координат машины. Например, центральная точка индикатора рабочей области может быть связана с центральной точкой мачты стрелы, то есть оси точки опоры мачты стрелы 524. Дополнительно, ориентация индикаторов рабочей области может быть выровнена по переднему корпусу 522 лесозаготовительной машины, то есть по тому же корпусу, где стрела 524 прикреплена к точке шарнира стрелы (корпус подшипника). В погрузочной машине индикаторы рабочей области могут быть выровнены по заднему корпусу машины, так как мачта смонтирована на заднем корпусе в погрузочной машине. Центральная точка индикаторов рабочей области может быть скомпонована для перемещения, например, когда машина наклонена, или имеют место некоторые другие условия. Выравнивание индикаторов рабочей области может быть также сделано гибким способом в отношении множественных элементов, таких как передний корпус 522 и задний корпус 520 вместе, или выравнивание может изменяться в зависимости от наклона машины, формы земли и так далее. Индикаторы рабочей области могут содержать различные радиусы, различные формы, круглые конусы, овальные конусы, квадраты и зоны любого вида. Цвета могут быть использованы для индикации положительной или оптимальной рабочей области, и отрицательной или субоптимальной рабочей области. Индикаторы рабочей области или части индикаторов могут быть обозначены буквами, номерами, словами, изображениями или другими обозначениями. Например, квадраты индикатора рабочей области могут принимать обозначения, такие как "A1", "A2"..., "A12", "В1", "B2"..., "L11" и "L12". Ближайшие задачи затем могут относиться к этим обозначениям, чтобы направлять студента. Как правило, стрела имеет лучшую область действия сбоку машины, и с помощью индикаторов рабочей области этому теперь можно научить на тренажере. Правильным способам работы и порядку работы также можно научить с помощью индикаторов рабочей области. Для погрузочной машины индикатор рабочей области может помочь управлять погрузочной машиной устойчивым способом таким образом, чтобы риск опрокидывания машины был меньше.
Рабочие области могут быть разными для разных задач, например для загрузки и разгрузки. Может быть отображаемое предупреждение, если пользователь пытается продвинуться слишком далеко или за пределы надлежащей рабочей области. Индикаторы рабочей области могут зависеть от уровня обучения, например, более узкие рабочие области могут быть использованы для успевающих студентов. Также возможно задать точки для работы в оптимальной рабочей области. Могут быть также разные индикаторы рабочей области, разные размеры и формы для выбора в зависимости от задачи. Индикатор рабочей области может содержать напоминания ближайшей задачи, такие как текст, номера или иконки, например "штабель здесь" или "Лесосека" или "Зона погрузки". Такие напоминания или руководства могут помочь, например, расположить срубленные деревья в правильном месте с помощью лесозаготовительной машины (сбоку или впереди), или они могут направлять, чтобы расположить оставшиеся ветви в некоторой области. Руководство может также помочь корректно разместить лесозаготовительную машину или погрузочную машину, или руководство может указать область для погрузки. Например, индикатор рабочей области может стать зеленым или может мигать, когда машина была размещена корректно, согласно заданной задаче.
Как описано ранее, текстуры могут быть использованы при показе рабочей области. Текстура может быть наложена на форму участка местности, или она может быть наложена непосредственно на земной объект. Форма участка местности является плавающим вспомогательным объектом, следующим за землей, на верхнюю часть которого накладывается текстура. Форма участка местности располагается вверху в z-направлении от земли или по направлению к наблюдателю в пределах линии видимости. Форма участка местности может "погружаться" в объекты на участке местности, или может быть показана в верхней части объектов. Объект участка местности может тщательно следовать за землей, как рассмотрено в контексте канавы, расположенной рядом с дорогой на Фиг.5.
Индикатор рабочей области может помочь изучению несколькими способами. Индикатор рабочей области и команды относительно заданной задачи могут оставаться на экране в течение всего сеанса изучения. Индикатор рабочей области направляет изучение таким образом, чтобы студент учился правильно управлять машиной. Индикатор может быть легко включен и выключен, и он может применяться во многих различных машинах. Индикатор помогает визуализировать окружение, где отсутствует трехмерная информация из-за ограниченной компоновки дисплея (двухмерный дисплей). Индикатор улучшает перспективу и дает лучшую оценку того, что будет в области действия машины. На тренажере изучение протягивания вбок обычно является немного трудным, так как экран находится впереди. Индикатор рабочей области помогает направлять студента, чтобы управлять сбоку от машины.
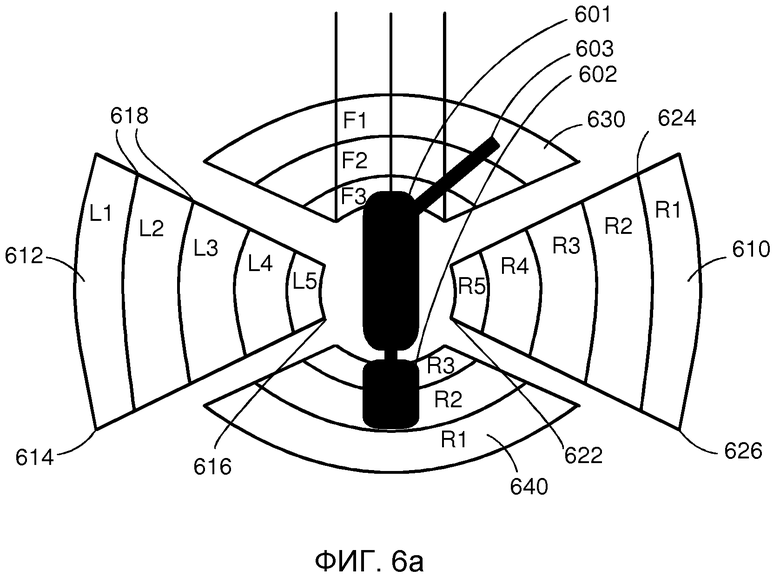
Фиг.6a и 6b показывают схематические представления различных индикаторов рабочей области для лесных машин, согласно варианту осуществления изобретения. На Фиг.6a показаны рабочие области для лесозаготовительной машины с двумя главными частями 601 и 602. Область действия стрелы 603 может быть показана индикатором 610, 612 в форме конуса (боковые рабочие области) и 630 (передняя рабочая область). Самая дальняя область действия стрелы 603 может быть показана дугами 614 и 626, а также самая близкая область действия может быть показана дугами 616 и 622. Могут быть другие индикаторы для того, чтобы показать оптимальный диапазон стрелы, такой как область между дугами 618 и дугой 624. Путь машины для перемещения вперед может быть показан передней рабочей областью. Может также быть показана отрицательная рабочая область, такая как задняя рабочая область 640, где стрела не может или не должна протягиваться.
Различные индикаторы рабочей области могут иметь подобласти, и эти подобласти могут быть обозначены. Например, как показано на Фиг.6a, левая рабочая область может быть разделена на секции L1, L2, L3, L4 и L5, правая рабочая область может быть разделена на секции R1, R2, R3, R4 и R5, передняя рабочая область может быть разделена на секции F1, F2 и F3, и задняя рабочая область может быть разделена на секции B1, B2 и B3. Эти обозначения затем могут быть использованы, например, при осуществлении руководства ближайшей задачей, ссылаясь на команды или оценку этих обозначений. Также может быть использован индикатор асимметричной рабочей области на основании положения и позиции рабочей машины.
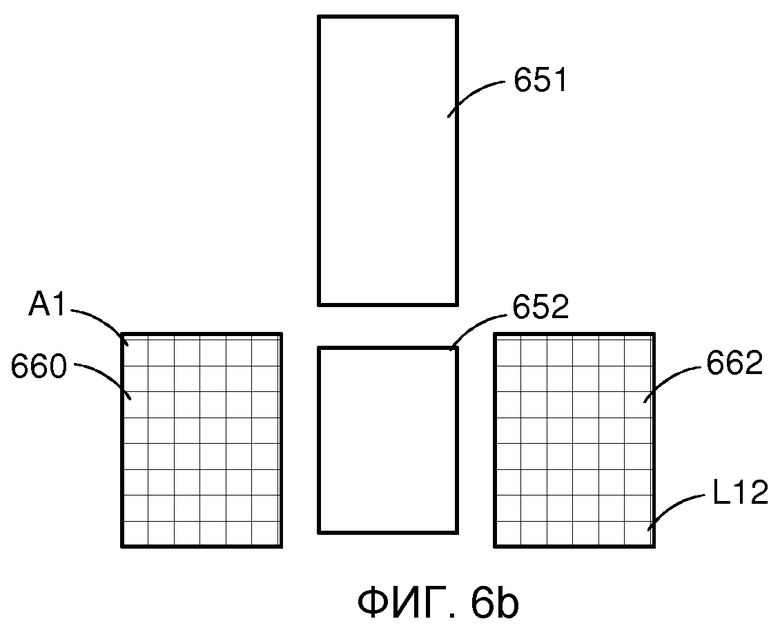
На Фиг.6b показаны рабочие области для погрузочной машины, содержащей две главные части 651 и 652. Эти рабочие области могут быть областями в форме конуса, как описано выше, или областями 660 и 662 в форме прямоугольника, как показано на чертеже. Индикаторы рабочей области могут иметь обозначенные квадраты или другие отмеченные местоположения для более точного направления работы. Отметка может быть выполнена числами, буквами, текстом или цветом. Также могут быть использованы звуковые индикаторы. Индикаторы рабочей области могут содержать множественные меньшие части, которые затем выбираются, чтобы сформировать целый индикатор для заданной задачи. Индикаторы могут быть также сформированы вручную, например, растягиваясь от первоначальной формы или чертежа. Как описано ранее, различные рабочие области могут быть подразделены на секции, и эти секции могут быть обозначены, например, обозначениями, такими как "А1"-"L12". Эти обозначения затем могут быть использованы, например, при направлении ближайшей задачи, ссылаясь на команды или оценку этих обозначений.
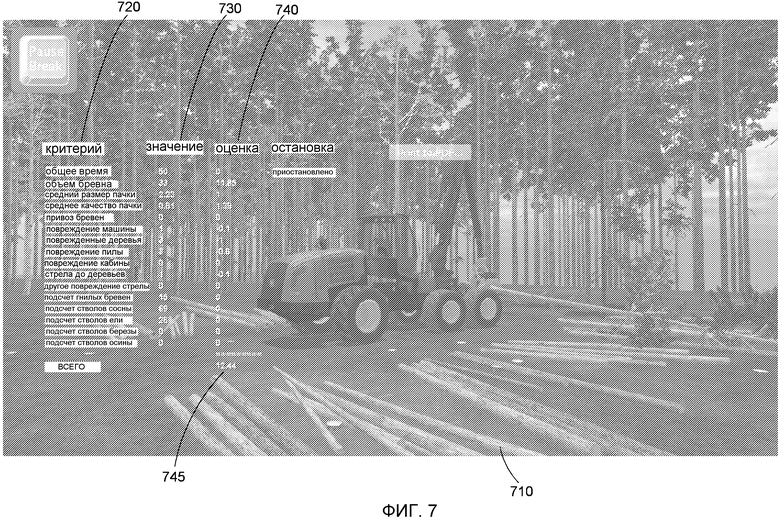
Фиг.7 показывает вид лесной машины в режиме обучения, согласно варианту осуществления изобретения. В дополнение к видимым результатам работы, таким как срубленные деревья 710, режим обучения обеспечивает точную систему оценок, которая может быть определена, чтобы следить за успехами студента. Могут быть различные критерии 720, согласно которым оценивается результат работы. Эти критерии определяются значениями 730, и из этих значений вычисляются оценки 740 критериев. Общей оценкой является индикатор результата работы студента. Различные критерии результатов работы были перечислены в Таблице 1.
Использование индикаторов рабочей области может обеспечить преимущества для изучения. Например, с помощью тренажера можно научить эффективному способу работы. Деревья удаляются сбоку, но не впереди. Деревья впереди будут находиться в оптимальной рабочей области (стороне), когда машина будет двигаться вперед. В качестве другого примера, может быть показан необходимый путь движения (ширина), и минимальная и максимальная область действия, а также показан оптимальный диапазон управления. Использование индикатора рабочей области позволяет продолжить изучение на тренажере в течение более длительного времени без необходимости перемещаться в реальную машину, так как происходит меньше "ложного изучения". Это может обеспечить экономию затрат и ускорить изучение.
Индикатор рабочей области может также помочь изучить область действия стрелы таким образом, чтобы это знание затем пригодилось в реальных условиях работы. Индикатор рабочей области помогает понять воздействие стрелы на устойчивость машины - на тренажере это является иначе стимулирующим для понимания студента. Видимая информация относительно ширины и радиусов помогает изучить подходящее размещение лесозаготовительной машины и подходящее использование стрелы в погрузочной машине.
Фиг.8 показывает вид изменения смоделированного участка местности в лесной машине для режима обучения, согласно варианту осуществления изобретения. Программное обеспечение тренажера может содержать, например, следующие три режима, которые могут быть реализованы как отдельные взаимосвязанные программы или различные виды в одной программе, или любая их комбинация. Первый режим может включать в себя редакторы окружающего участка местности, деревьев, дорог и других объектов в окружении - он может называться программой изменения окружения. Редактор окружения позволяет формировать участок местности с учетом возвышения поверхности, и он позволяет помещать различные объекты на участок местности (или, возможно, в участок местности). Различные объекты могут быть размещены или автоматически, или вручную, или полуавтоматически в качестве группы. Редактор окружения может позволить загружать предварительно созданное окружение из файла, и он может позволить сохранить часть окружения или все окружение в файле для более позднего использования. Второй режим может быть редактором оценок, где могут быть определены баллы для различных операций. Третий режим может быть режимом моделирования, как показано, например, на Фиг.5.
На Фиг.8 редактор имеет участок местности 810, где могут быть расположены различные объекты. На карте могут быть деревья, скалы и другие объекты 840. Дороги 820 и формы 830 участка местности могут быть созданы на карте. Есть кнопки для добавления различных объектов, таких как группы деревьев 842, электрические линии 844, формы 846 поверхности и дороги 848. Окружение может быть создано вручную, например, дерево за деревом, или полуавтоматически, например, как группы деревьев, заполняющие некоторую область и имеющие некоторые характеристики плотности. Преимуществом такого редактора участка местности является то, что обучающие пейзажи могут быть созданы заранее и сохранены для более позднего использования. Так как лес существует в компьютере, он может "вырасти" снова через несколько секунд после вырубки. Поэтому компьютеризированный материал обучения остается современным и может быть легко повторно использован.
Фиг.9a и 9b показывают два типа лесных машин, управление которыми может быть смоделировано на тренажере, согласно варианту осуществления изобретения. На Фиг.9a показана лесозаготовительная машина, содержащая две главные части: часть 910 двигателя и часть кабины, соединенные с помощью шарнирного соединения 925. Лесозаготовительная машина может иметь колеса 930, чтобы работать на участке местности, или другие средства ее опоры на земле. Лесозаготовительная машина имеет стрелу с головкой пилы для рубки деревьев и обрезки сучьев. На Фиг.9b показана погрузочная машина для транспортировки стволов из леса. Погрузочная машина имеет две части: часть 950 кабины и часть 960 корзины. Погрузочная машина имеет стрелу и головку захватного устройства, прикрепленного к стреле для сбора стволов в корзину 980. Погрузочная машина может также работать на колесах 990. На тренажере также возможны другие типы машин.
Фиг.10 показывает пример отображения рабочей области рабочей машины на дисплее внутри рабочей машины. Дисплей скомпонован, чтобы показать оператору рабочей машины информацию о состоянии рабочей машины 1030, а также информацию о ближайшей задаче 1040, 1050 и 1055. Например, дисплей может показать состояние двигателя и батареи лесной машины или лесозаготовительной машины, и он может указать оператору размеры срубленного дерева и породу срубленного дерева (например, в настоящем описании "KUUSI" или "SPRUCE"). Чтобы помочь управлению машиной, дисплей может быть приспособлен, чтобы показать индикаторы рабочей области на экране. Также может быть информация, такая как имя оператора (в настоящем описании "Pekka"), и машина может записать вырабатываемый выход продукции, соответствующий человеку, управляющему машиной, позволяя многим людям последовательно управлять машиной.
Дисплей может показывать позицию и положение машины 1010, а также направление, длину и перемещение стрелы 1095. Левая рабочая область 1025, правая рабочая область 1020, а также передняя рабочая область 1022 могут быть указаны соответствующими подобластями и обозначениями подобласти. Показ индикаторов рабочей области на экране может помочь оператору оптимально управлять машиной. Участок местности может быть показан в указателе области работы на экране с помощью средства камеры или сканера, например, прикрепленного к стреле. Индикатор рабочей области может быть также показан на реальном экране контроллера на тренажере в дополнение к показу индикаторов рабочей области в смоделированном мире.
Индикатор рабочей области может также быть приближен к экрану всякий раз, когда стрела перемещается посредством оператора, и удален от экрана в других случаях. Это помогает оптимально использовать пространство отображения и позволяет оператору следить только за самыми важными индикаторами на экране. Например, когда дерево срубается, и стрела не перемещается, оператор может оценить, чтобы увидеть данные, связанные с вырубкой. Поэтому всякий раз, когда дерево срубается, могут быть показаны индикаторы, такие как длина ствола и объем готовых бревен. Во время других операций могут быть показаны другие данные, и индикатор рабочей области может быть удален от экрана или сведен к минимуму, чтобы занимать меньше области экрана. Когда оператор перемещает стрелу, индикатор рабочей области может быть приближен к экрану, или он может быть увеличен от маленького индикатора до большего индикатора, чтобы быть лучше видным, или индикаторы рабочей области могут заполнить по существу весь экран. Показ перемещения стрелы и позиции могут требовать датчиков на стреле для того, чтобы воспринять направление, длину (удлинение) и перемещение стрелы.
Фиг.11 показывает пример использования головного дисплея для индикации рабочей области рабочей машины в реальных условиях работы. Оператор рабочей машины может быть обучен на тренажере посредством показа индикаторов рабочей области в смоделированном мире и, возможно, в одно и то же время на реальном экране контроллера, как объяснено со ссылками на Фиг.10. Реальная рабочая машина, такая как лесная машина или лесозаготовительная машина, или погрузочная машина, может быть оснащена головным дисплеем для того, чтобы показать индикаторы рабочей области, знакомые из обучающего индикатора.
Реальная рабочая машина имеет кабину с окнами 1110 (правое окно), 1120 (левое окно) и 1130 (переднее окно). Рабочая машина может иметь те же средства 1140, 1145 и 1150 управления, как на тренажере, и экран 1145 управления может показывать те же индикаторы рабочей области, как на тренажере. Чтобы дополнительно повысить практичность индикаторов рабочей области, они могут быть показаны спроецированными на окна с помощью головного дисплея. Может быть множество головных дисплеев, например три или четыре, или более, или только один.
В примерной компоновке правый индикатор 1118 рабочей области спроецирован на правое окно 1110 с помощью головного дисплея 1115. Левый индикатор 1128 рабочей области спроецирован на левое окно 1120 с помощью головного дисплея 1125. Передний индикатор 1138 рабочей области спроецирован на переднее окно 1130 с помощью головного дисплея 1135. Посредством этого индикаторы рабочей области могут быть видны оператору, как если бы они были в верхней части участка местности. Головные дисплеи могут быть приспособлены, чтобы учитывать высоту оператора таким образом, чтобы индикаторы рабочей области были видны в правильном месте в верхней части участка местности. Головные дисплеи также могут быть в состоянии приспособиться к перемещению головы оператора, и они могут приспособиться к наклону машины посредством изменения проекции на окно.
Могут быть использованы другие конструкции для проецирования индикаторов рабочей области на участок местности в визуальном поле оператора. В основном могут быть использованы любые средства, которые в состоянии сформировать изображение индикаторов рабочей области таким образом, чтобы оно появлялось в верхней части участка местности. Такие конструкции могут быть специальным шлемом, который следует за перемещениями головы, прозрачными видеоочками, которые определяют, как ориентирован оператор, или даже могут быть использованы конструкции проекции луча. Изображение может быть сформировано на любой поверхности, даже непосредственно на поверхности сетчатки глаза.
Различные варианты осуществления изобретения могут быть реализованы с помощью компьютерного программного кода, который постоянно находится в памяти и вынуждает релевантные устройства выполнять изобретение. Например, устройство терминала может содержать схему и электронные устройства для обработки, приема и передачи данных, компьютерный программный код в памяти и процессор, который при выполнении компьютерного программного кода вынуждает устройство терминала выполнять признаки варианта осуществления. Дополнительно, устройство сети может содержать схему и электронные устройства для обработки, приема и передачи данных, компьютерный программный код в памяти и процессор, который при выполнении компьютерного программного кода вынуждает устройство сети выполнять признаки варианта осуществления.
Очевидно, что настоящее изобретение не ограничивается исключительно вышепредставленными вариантами осуществления, но оно может быть изменено в рамках приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОЦЕНКИ ПРОИЗВОДИТЕЛЬНОСТИ ПРОИЗВОДСТВЕННОЙ МАШИНЫ И ЭФФЕКТИВНОСТИ РАБОТЫ ЕЕ ОПЕРАТОРА | 2009 |
|
RU2458403C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЛЕСОТЕХНИЧЕСКОЙ МАШИНОЙ | 2010 |
|
RU2628587C2 |
| Устройство для управления рабочей машиной | 2014 |
|
RU2658708C1 |
| СИМУЛЯТОР СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2014 |
|
RU2657617C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОЕКТИРОВАНИЯ И/ИЛИ УПРАВЛЕНИЯ, И/ИЛИ ИМИТАЦИИ РАБОТЫ СТРОИТЕЛЬНОЙ МАШИНЫ | 2017 |
|
RU2753165C2 |
| ТРЕНАЖЕР АВИАЦИОННЫЙ | 2003 |
|
RU2324982C2 |
| УЧЕБНЫЙ ТРЕНАЖЕР БОЕВЫХ РАСЧЕТОВ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 2014 |
|
RU2547955C1 |
| ИНТЕРАКТИВНЫЙ ТРЕНАЖЕР ДЛЯ ОСУЩЕСТВЛЕНИЯ ТРЕНИРОВОК С ПОМОЩЬЮ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2020 |
|
RU2761325C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ РАБОТОЙ УСТРОЙСТВА С ИСПОЛЬЗОВАНИЕМ КОМПЛЕКСНОГО МОДЕЛИРОВАНИЯ С ВОЗМОЖНОСТЬЮ ВРЕМЕННОГО СДВИГА | 2008 |
|
RU2481612C2 |
| СИСТЕМЫ И СПОСОБЫ ОЦЕНИВАНИЯ И ОПТИМИЗАЦИИ ЭФФЕКТИВНОСТИ СТИМУЛЯЦИИ С ИСПОЛЬЗОВАНИЕМ ОТВОДНЫХ УСТРОЙСТВ | 2016 |
|
RU2705012C1 |
Изобретение относится к симулятору лесной машины. При отображении рабочей области стрелы (524) смоделированной лесной машины (520, 522) на тренажере лесной машины (520, 522) определяют размер части рабочей области (530, 532, 536, 540, 542) смоделированной лесной машины (520, 522). Осуществляют индикацию рабочей области (530, 532, 536, 540, 542) смоделированной лесной машины (520, 522). Индикация рабочей области (530, 532, 536, 540, 542) связана со смоделированной лесной машиной (520, 522) так, что индикация рабочей области (530, 532, 536, 540, 542) перемещается со смоделированной лесной машиной (520, 522). Индикация рабочей области (530, 532, 536, 540, 542) по меньшей мере частично видна в верхней части смоделированного участка местности, примыкающего к смоделированной лесной машине. Выравнивают индикации рабочей области (530, 532, 536, 540, 542) по отношению к смоделированному участку местности с ориентацией части смоделированной лесной машины. Достигается оптимизация обучения на тренажере. 4 н. и 8 з.п. ф-лы, 11 ил., 1 табл.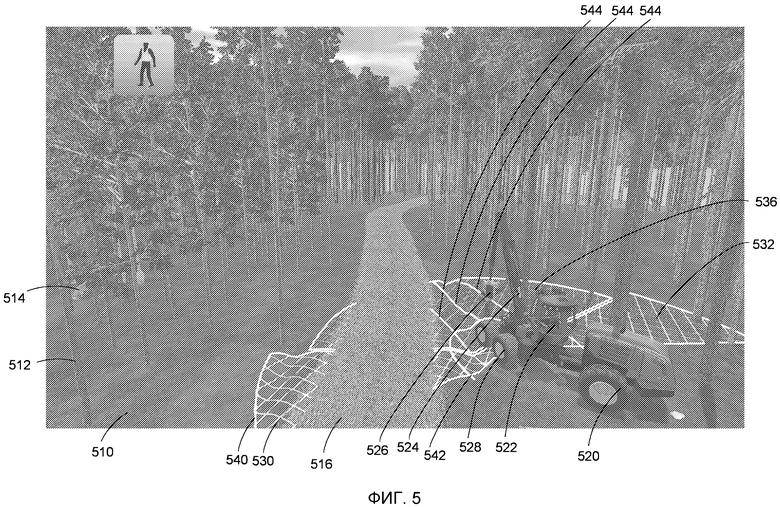
1. Способ для отображения рабочей области стрелы смоделированной лесной машины на тренажере лесной машины, причем способ содержит:
- электронное определение размера по меньшей мере части рабочей области смоделированной лесной машины,
- электронную индикацию рабочей области смоделированной лесной машины, причем индикация рабочей области связана со смоделированной лесной машиной так что индикация рабочей области перемещается со смоделированной лесной машиной, и при этом индикация рабочей области по меньшей мере частично видна в верхней части смоделированного участка местности, примыкающего к смоделированной лесной машине, и
- выравнивание индикации рабочей области по отношению к смоделированному участку местности с ориентацией части смоделированной лесной машины.
2. Способ по п.1, дополнительно содержащий:
- электронное моделирование участка местности вокруг смоделированной лесной машины с формой участка местности, и
- электронное индицирование рабочей области смоделированной лесной машины в верхней части формы участка местности, и
- электронное индицирование рабочей области с помощью текстуры.
3. Способ по п.1, дополнительно содержащий:
- выравнивание индикации рабочей области с ориентацией кабины или с ориентацией шарнира стрелы.
4. Способ по п.1, дополнительно содержащий:
- определение информации о задаче лесного хозяйства, выполняемой пользователем, и
- электронное индицирование рабочей области смоделированной лесной машины на основании упомянутой информации о задаче лесного хозяйства.
5. Способ по п.1, в котором упомянутая индикация рабочей области содержит по меньшей мере одно из группы: индикатор пути перемещения смоделированной лесной машины, указывающий ширину нужного пути, когда смоделированная лесная машина движется вперед, индикатор самой близкой области действия стрелы, индикатор самой дальней области действия стрелы, индикатор положительной рабочей области, индикатор отрицательной рабочей области, индикатор рабочего конуса, индикатор рабочего квадрата и индикатор асимметричной рабочей области на основании положения и позиции смоделированной лесной машины.
6. Способ по п.1, в котором средства управления сконфигурированы для использования со смоделированной лесной машиной.
7. Устройство, содержащее процессор, память, включающую в себя компьютерный программный код, память и компьютерный программный код, сконфигурированные для того, чтобы посредством процессора вынуждать упомянутое устройство выполнять способ по любому из пп.1-6.
8. Устройство по п.7, в котором средства управления сконфигурированы для использования смоделированной лесной машиной.
9. Устройство, содержащее:
- средство управления стрелой смоделированной лесной машины для приема ввода управления от пользователя и формирования сигналов управления для управления устройством,
- средство для обработки упомянутых сигналов управления от блока управления,
- средство для определения размера по меньшей мере части рабочей области смоделированной лесной машины,
- средство для индикации рабочей области смоделированной лесной машины, причем индикация рабочей области связана со смоделированной лесной машиной так, что индикация рабочей области перемещается со смоделированной лесной машиной, и при этом индикация рабочей области по меньшей мере частично видна в верхней части участка местности, примыкающего к смоделированной лесной машине, и
- средство для выравнивания индикации рабочей области с ориентацией части смоделированной лесной машины.
10. Устройство по п.9, дополнительно содержащее:
- средство для моделирования смоделированной лесной машины посредством компьютера таким образом, чтобы по меньшей мере одна часть смоделированной лесной машины была смоделированной компьютером частью, и
- средство для отображения перемещения смоделированной компьютером части смоделированной лесной машины для пользователя устройства.
11. Система, содержащая по меньшей мере первое смоделированное устройство и второе смоделированное устройство по п.7, в которой первое смоделированное устройство и второе смоделированное устройство соединены с помощью соединения данных, и первое смоделированное устройство и второе смоделированное устройство сконфигурированы для того, чтобы показать информацию, указывающую работу второго смоделированного устройства в первом смоделированном устройстве.
12. Система по п.11, в которой первое смоделированное устройство сконфигурировано для того, чтобы показать графическую форму второго смоделированного устройства в виртуальном окружении первого смоделированного устройства.
| ТРАНСФОРМАЦИЯ ШКАЛЫ ВРЕМЕНИ КАДРОВ В ШИРОКОПОЛОСНОМ ВОКОДЕРЕ | 2007 |
|
RU2414010C2 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 5751576 A, 12.05.1998 | |||

