Область техники
Настоящее изобретение относится в целом к рабочим машинам, и более конкретно к управлению загрузкой ковша рабочей машины.
Предпосылки создания изобретения
Различные горнодобывающие транспортные средства, такие как буровое оборудование, погрузочное оборудование и транспортное оборудование, могут управляться человеком или работать в беспилотном режиме. Беспилотные транспортные средства могут управляться дистанционно оператором, например, из станции управления, и они могут быть оборудованы измерительными приборами, пригодными для определения местоположения. Беспилотными горнодобывающими транспортными средствами можно управлять автоматически, например, по желаемому маршруту в шахте, пока возможно определение местоположения устройства. Автоматическую работу можно выполнять на поверхности или под землей.
Погрузочное оборудование может использоваться для погрузки и перемещения вынутого грунта из одного места в другое, например, из шахты наружу или на погрузочный поддон транспортного оборудования. Загрузку ковша погрузочного оборудования можно выполнять, например, так, чтобы погрузочное оборудование работало около груды вынутого грунта, такого как руда, камни или песок. Затем ковш можно опустить, как и стрелу, с которой соединен ковш, при этом ковш находится на поверхности грунта или около нее. Затем погрузочное оборудование можно переместить вперед так, чтобы ковш вошел в контакт с указанной грудой. Это перемещение погрузочного оборудования можно продолжать с максимально возможным усилием. Если погрузочное оборудование останавливается из-за слишком большого сопротивления груды материала, ковш можно поднять вверх, что может позволить переместить погрузочное оборудование немного дальше. Материал, загруженный в ковш, можно затем переместить в другое место, например к точке, зарезервированной для выгрузки материала, или на погрузочный поддон транспортного оборудования.
Сущность изобретения
Усовершенствованный способ и техническое оборудование, реализующее этот способ, предназначены для повышения эффективности загрузки ковша рабочей машины. Различные аспекты изобретения включают способ, устройство, рабочую машину и компьютерный программный продукт, которые отличаются признаками, сформулированными в независимых пунктах формулы изобретения. Различные варианты выполнения настоящего изобретения раскрыты в зависимых пунктах формулы изобретения.
Согласно первому аспекту, предложен способ загрузки материала в ковш рабочей машины из груды материала, включающий: выбор профиля управления, который используется в качестве базового профиля управления и содержит указания положений ковша и/или стрелы рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения; получение информации о расстоянии, пройденном рабочей машиной при загрузке материала в ковш; проверку по меньшей мере одного условия, относящегося к рабочей машине, во время загрузки; определение на основе указанного проверенного условия, следует ли использовать другое положение, нежели указанное в выбранном профиле управления, для ковша и/или стрелы; и, если да, выбор указанного другого положения.
Согласно второму аспекту, предложено устройство для управления загрузкой материала в ковш рабочей машины из груды материала, предназначенное для выполнения следующих операций:
a) выбор профиля управления, который используется в качестве базового профиля управления и содержит указания положений ковша и/или стрелы рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения;
b) получение информации о расстоянии, пройденном рабочей машиной при загрузке материала в ковш;
c) проверка по меньшей мере одного условия, относящегося к рабочей машине, во время загрузки
d) определение на основе указанного проверенного условия, следует ли использовать другое положение ковша и/или стрелы, нежели указанное в выбранном профиле управления; и
e) выбор указанного другого положения, если шаг d указывает, что следует использовать другое положение ковша и/или стрелы, нежели указанное в выбранном профиле управления.
Согласно третьему аспекту, предложен компьютерный программный продукт, хранящийся в памяти и содержащий компьютерный программный код для осуществления загрузки материала в ковш рабочей машины из груды материала, при этом указанный компьютерный программный код при выполнении его процессором заставляет устройство выполнять следующее:
a) выбор профиля управления, который используется в качестве базового профиля управления и содержит указания для положений ковша и/или стрелы рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения;
b) получение информации о расстоянии, пройденном рабочей машиной при загрузке материала в ковш;
c) проверку по меньшей мере одного условия, относящегося к рабочей машине, во время нагрузки;
d) определение на основе указанного проверенного условия, следует ли использовать другое положение ковша и/или стрелы, нежели указанное в выбранном профиле управления; и
e) выбор указанного другого положения, если шаг d указывает, что следует использовать другое положение ковша и/или стрелы, нежели указанное в выбранном профиле управления.
Согласно четвертому аспекту, предложена дистанционно управляемая рабочая машина, содержащая ковш, прикрепленный к стреле, для загрузки материала в ковш из груды материала, при этом указанная рабочая машина содержит:
- профиль управления, который используется в качестве базового профиля управления и содержит указания на положение ковша и/или стрелы рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения;
- оборудование для получения информации о расстоянии, пройденном рабочей машиной во время загрузки материала в ковш;
- оборудование для контроля условий, предназначенное для контроля по меньшей мере одного условия, относящегося к рабочей машине;
- управляющий блок, предназначенный для:
- проверки по меньшей мере одного условия, относящегося к рабочей машине, во время загрузки;
- определения на основе указанного проверенного условия, следует ли использовать другое положение ковша и/или стрелы, нежели указанное в выбранном профиле управления; и
- выбора указанного другого положения, если было определено, что следует использовать другое положение ковша и/или стрелы, нежели указанное в выбранном профиле управления.
Некоторые предпочтительные варианты выполнения настоящего изобретения определены в зависимых пунктах формулы изобретения. Очевидно, к устройству, рабочей машине и/или компьютерному программному продукту могут быть применимы различные признаки, сформулированные в зависимых пунктах формулы изобретения.
Эти и другие аспекты настоящего изобретения и связанных с ним вариантов его выполнения станут очевидными из последующего подробного описания вариантов выполнения настоящего изобретения.
Список чертежей
Ниже настоящее изобретение описано на примере различных вариантов его выполнения со ссылками на сопровождающие чертежи, где:
на фиг. 1 в качестве примера рабочей машины схематично показано погрузочное устройство, подходящее для реализации вариантов выполнения настоящего изобретения;
на фиг. 2 показан пример маршрута передвижения рабочей машины от начальной точки до достижения груды материала;
на фиг. 3 схематично показаны направления перемещений ковша и стрелы рабочей машины согласно варианту выполнения настоящего изобретения;
на фиг. 4 показана последовательность операций для способа согласно первому варианту выполнения настоящего изобретения;
на фиг. 5 показана последовательность операций для способа согласно второму варианту выполнения настоящего изобретения;
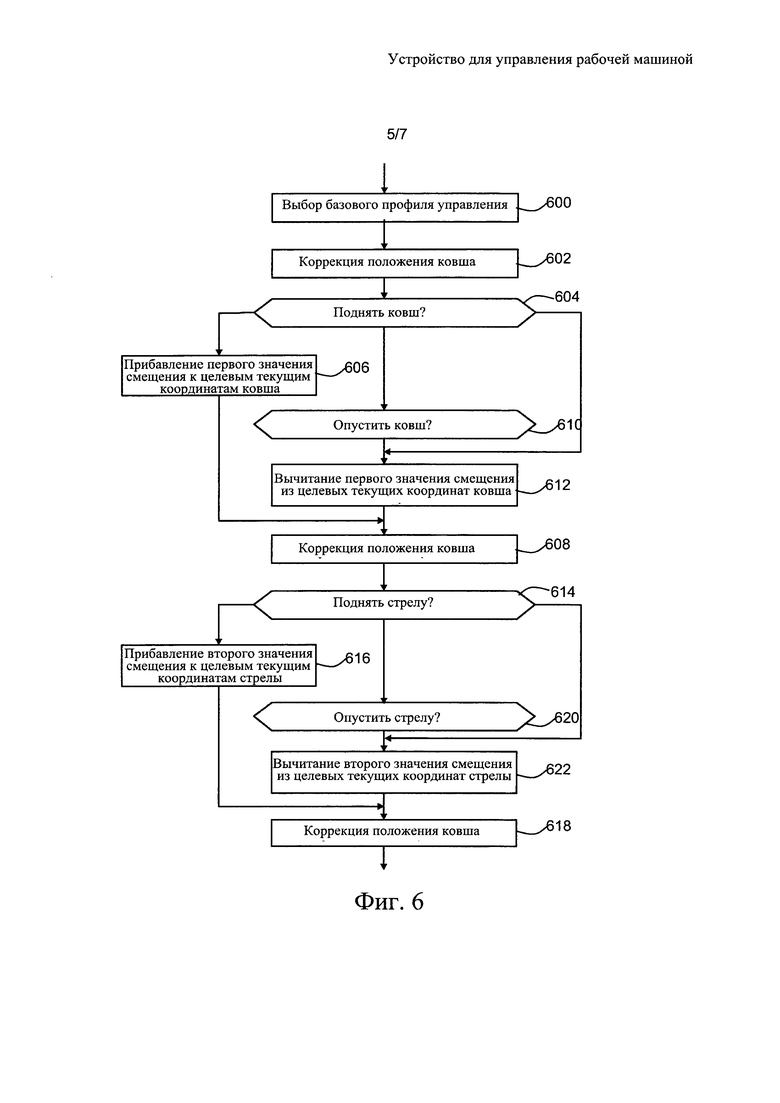
на фиг. 6 показана последовательность операций для способа согласно третьему варианту выполнения настоящего изобретения;
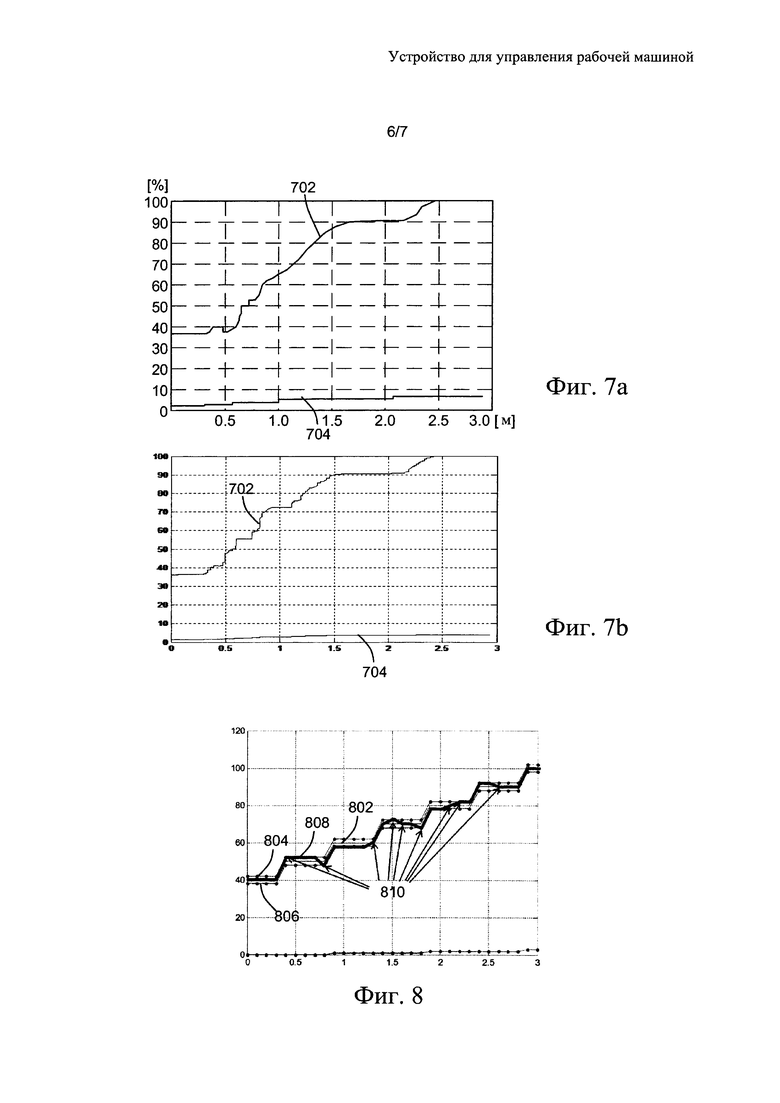
на фиг. 7а и 7b показаны примеры базовых профилей управления;
на фиг. 8 показан пример изменений профиля управления во время работы рабочей машины; и
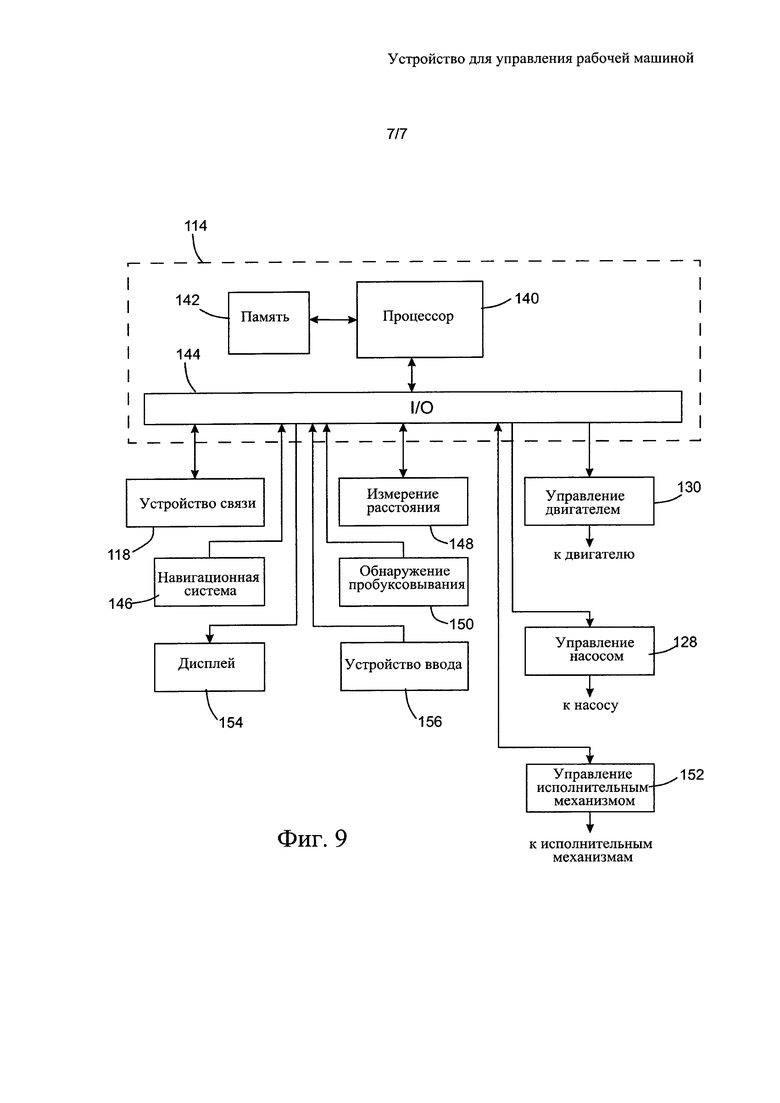
на фиг. 9 показана блок-схема управляющего блока согласно примеру варианта выполнения настоящего изобретения.
Описание некоторых вариантов выполнения настоящего изобретения
Раскрытые варианты выполнения настоящего изобретения применимы, в частности, к различным дистанционно действующим рабочим машинам, используемым в горнодобывающей промышленности, на стройплощадках и т.д. и подходящим для погрузки, перемещения и выгрузки вынутого грунта или другого сыпучего материала. Конкретные примеры таких рабочих машин включают погрузочное оборудование, содержащее ковш, прикрепленный к стреле. Вынутый грунт может, например, быть камнями, поднятыми на поверхность или в подземные области. В этом контексте термин «камни» следует трактовать широко, чтобы он охватывал также валуны, скальную породу, земную кору и другой относительно твердый материал.
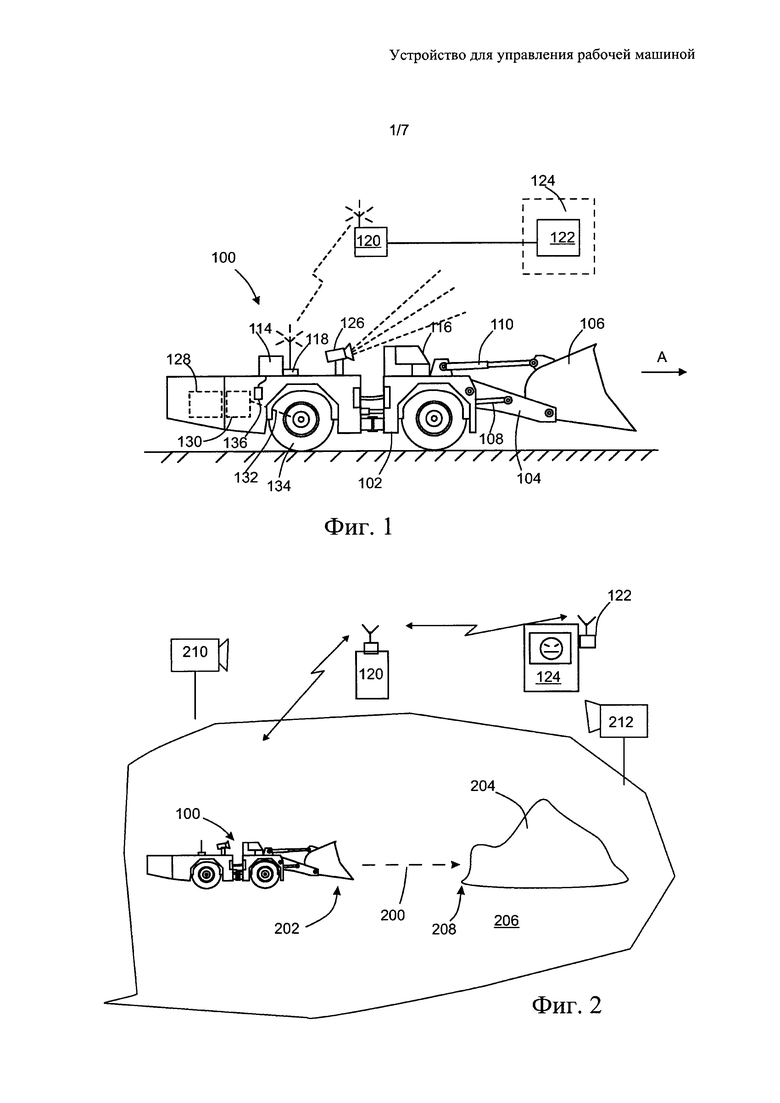
На фиг. 1 показан пример рабочей машины 100, содержащей подвижное несущее устройство 102, одну или более стрел 104 и ковш 106, прикрепленный с возможностью поворота или другого перемещения к указанной одной или более стрел 104. Например, ковш 106 может быть соединен с двумя стрелами 104 рабочей машины. Это крепление может содержать стержень, относительно которого может поворачиваться ковш 106. Рабочая машина 100 дополнительно содержит первый исполнительный механизм 108 для перемещения стрелы 104 вверх и вниз, и второй исполнительный механизм 110 для поворота ковша 106, как будет описано ниже. Исполнительные механизмы 108, 110 могут быть гидравлическими и/или электрическими, или действовать от некоторого другого источника энергии. Следует отметить, что первый исполнительный механизм 108 и/или второй исполнительный механизм 110 могут на практике содержать больше, чем один исполнительный механизм. Буровое устройство как правило содержит множество насосов 128, предназначенных для создания гидравлического давления для управления различными частями устройства, например для перемещения рабочей машины 100, подъема стрелы 104, поворота ковша 106 и т.д. Альтернативно или дополнительно к гидравлическим насосам рабочая машина 100 может содержать один или более других источников энергии, таких как аккумулятор, водородный контейнер, топливный бак и т.д.
Рабочая машина 100 может содержать двигатель 130, который может приводиться в действие гидравлическим насосом 128, или это может быть, например, двигатель внутреннего сгорания или электродвигатель. Мощность от двигателя 130 может передаваться коленчатым валом 132 к колесам 134 или непосредственно, или посредством коробки передач (не показана).
Рабочая машина 100 дополнительно содержит по меньшей мере один управляющий блок 114, предназначенный для управления исполнительными механизмами рабочей машины 100, при этом исполнительные механизмы установлены в первой системе управления. Управляющий блок 114 может быть компьютером или соответствующим устройством и может содержать пользовательский интерфейс с дисплейным устройством, а также управляющие средства для выдачи команд и информации в управляющий блок 114. Управляющий блок 114 и его пользовательский интерфейс могут быть расположены в кабине 116 бурового устройства 100.
Кроме того, погрузочное устройство 100 может иметь блок 118 передачи данных, с которым управляющий блок 114 может установить связь с возможностью передачи данных во вторую систему 122 управления, внешнюю по отношению к погрузочному устройству 100, с использованием беспроводного соединения, обеспечиваемого базовой станцией 120. Вторая система управления может находиться в управляющей станции 124, которая может быть расположена вне шахты. Системы управления могут быть компьютерами, оборудованными соответствующим программным обеспечением. Удаленный оператор может осуществлять мониторинг и управлять работой погрузочного устройства 100 посредством беспроводного соединения.
На фиг. 9 показана блок-схема варианта выполнения управляющего блока 114 согласно настоящему изобретению. Управляющий блок 114 может содержать процессор 140, предназначенный для выполнения машинного кода, память 142 для хранения машинного кода, данных и т.д., интерфейс 144 для связи с периферийным оборудованием управляющего блока, таким как навигационная система 146, устройство 148 измерения расстояния, систему 150 для обнаружения проскальзывания, устройства 152 вывода для управления исполнительными механизмами 108, 110, гидравлический насос (насосы) 128, двигатель 130 и т.д., дисплей 154 для отображения информации, устройство 156 ввода для приема инструкций, блок 118 передачи данных и т.д.
Фиг. 1 и 9 являются упрощенными, и система управления горнодобывающим транспортным средством, таким как погрузочное устройство 100, может содержать несколько блоков, предназначенных для осуществления различных управляющих функций. Система управления горнодобывающим транспортным средством может быть распределенной конструкцией, состоящих из модулей, связанных, например, шиной CAN (контроллерная сеть) и осуществлять все измерения и функции управления машины. Информационная система управляющей станции 124 может также содержать один или более серверов, баз данных, автоматизированных рабочих мест оператора и соединений с другими сетями и системами.
Рабочая машина 100 на фиг. 1 и управляющий блок 114 на фиг. 9 показаны здесь только в качестве примера транспортного средства и управляющего блока, в которых могут быть осуществлены варианты выполнения настоящего изобретения, раскрытые здесь. Варианты выполнения настоящего изобретения в равной степени применимы к любым другим погрузочным транспортным средствам и управляющим блокам.
В одном из вариантов выполнения настоящего изобретения управляющий блок 114 получает информацию о расстоянии, пройденном рабочей машиной 100, из источника, внешнего по отношению к рабочей машине 100. Например, в шахте могут иметься устройства измерения расстояния, бесконтактные датчики и т.д. которые могут послать информацию о местоположении рабочей машины 100 в управляющий блок 114, при этом управляющий блок 114 может использовать эту информацию для определения расстояния, пройденного рабочей машиной 100, или же источник может предоставить эту информацию в управляющий блок 114.
В еще одном варианте выполнения настоящего изобретения управляющий блок 114 может быть внешним по отношению к рабочей машине 100, при этом рабочая машина 100 может содержать или не содержать такой управляющий блок 114.
Система управления горнодобывающим транспортным средством может содержать систему или блок определения местоположения. Для определения местоположения горнодобывающего транспортного средства можно использовать различные способы, например, в зависимости от того, используется ли горнодобывающее транспортное средство в поверхностном бурении или в подземном бурении. При поверхностном бурении для определения местоположения и ориентации горнодобывающего транспортного средства с достаточной точностью можно использовать спутниковую систему навигации, такую как система GPS.
При подземном бурении местоположение горнодобывающего транспортного средства может быть определено, например, с использованием процесса тахеометрии. Достаточное число навигационных точек с заранее заданным местоположением, например в туннеле, где производятся земляные работы, используются для связи тахеометра с системой координат xyz. В горнодобывающее транспортное средство загружают целевые местоположения, определенные относительно начала системы координат горнодобывающего транспортного средства. Тахеометр используется для непрерывного измерения целевых координат xyz. Кроме того, по меньшей мере одна точка в груде материала может быть определена на уровне навигации. На основе этих данных, возможно вместе с таблицами кривизны и наклоном транспортного средства, горнодобывающее транспортное средство может определить свое местоположение и местоположение и ориентацию груды материала.
Другой возможный способ определения местоположения горнодобывающего транспортного средства основан на точном расчете, при котором текущее местоположение можно оценить с использованием предыдущего определенного положения и информации о расстоянии и направлении, в котором горнодобывающее транспортное средство переместилось из предыдущего определенного местоположения. Направление перемещения может быть получено с использованием, например, гироскопа, а расстояние может быть получено например, с помощью одометра или информации, предоставленной лазерным сканером. Ошибки, которые могут возникать при использования способа точного расчета, можно скорректировать, например, с использованием моделирования окружающей среды и профиля стен подземной буровой площадки.
Кроме того, независимо от того, используются ли для определения местоположения горнодобывающего транспортного средства спутниковая навигация, процесс тахеометрии или другой подходящий способ, это горнодобывающее транспортное средство и его суб-блоки, такие как рабочая машина 100, имеющая ковш 106 и стрелу 104, могут быть снабжены достаточным количеством датчиков, таких как гироскопы, компасные датчики, инклинометры, кодеры вращения, линейные кодеры и акселерометры, чтобы обеспечить достаточную точность позиционирования для процессов загрузки ковша и управления ковшом. В результате, когда горнодобывающее транспортное средство, управляемое с достаточной точностью, выполняет процесс загрузки ковша, может быть получено с достаточной точностью местоположение рабочей машины 100, ковша 106 и стрелы 104.
Таким образом, работой горнодобывающего транспортного средства можно дистанционно управлять и контролировать ее, а также автоматизировать, чтобы она выполнялось, по меньшей мере частично, автономно.
На фиг. 2 показан принцип действия рабочей машины 100 для загрузки ковша 106. Здесь рабочей машиной 100 можно управлять и контролировать ее со станции 124 дистанционного управления, расположенной вне рабочей области 206. В подземных шахтах станция дистанционного управления может быть расположена, например, на земной поверхности или в месте, удаленном от шахты, при этом в рабочей области может находиться множество камер 210, 212, предназначенных для контроля работы. Кроме того, рабочая машина 100 может быть снабжена одной или большим количеством камер. Изображения, захваченные камерами, передаются в станцию дистанционного управления. При бурении с поверхности станция дистанционного управления может быть расположена, например, в транспортном средстве, таком как фургон, при этом станция управления может содержать компьютеры, оборудованные необходимыми пользовательскими интерфейсами, такими как один или более дисплеев, и соответствующим программным обеспечением.
Между станцией 124 дистанционного управления и рабочей машиной 100 устанавливают беспроводное соединение с возможностью передачи данных. Рабочая машина 100 может периодически посылать через это беспроводное соединение различные данные датчиков и видеоданные, описывающее работу рабочей машины 100, в станцию управления. Удаленный оператор может производить мониторинг и управлять работой рабочей машины 100.
Ниже кратко рассмотрен вопрос терминологии. Профиль управления содержит информацию о желаемом положении ковша 106 и/или стрелы 104 рабочей машины 100 как функцию расстояния относительно базисного местоположения. Могут иметься один или более профилей управления, общих как для ковша 106, так и для стрелы 104, или могут быть отдельные профили управления, которые можно, таким образом, называть профилем управления ковшом и профилем управления стрелой соответственно. Набор профилей управления содержит несколько профилей управления, при этом один из профилей управления в наборе можно также называть базовым (или по умолчанию, или главным) профилем управления. Профили управления, которые определяют более высокое положение ковша или стрелы, чем базовый профиль управления, для того же расстояния от базисного местоположения, можно называть профилем управление выше базового профиля управления, и, соответственно, профили управления, которые определяют положение ковша или стрелы ниже, чем базовый профиль управления, можно называть профилем управления ниже базового профиля управления. В этом документе профиль управления ковшом, который указывает на более высокое положение ковша, чем другой профиль управления ковшом, также можно называть более высоким профилем управления ковшом. Соответственно, профиль управления ковшом, который указывает на более низкое положение ковша, чем другой профиль управления ковшом, также можно называть более низким профилем управления ковшом. Соответственно, в этом документе профиль управления стрелой, который указывает на большее высокое положение стрелы, чем другой профиль управления стрелой, также можно называть более высоким профилем управления стрелой, а профиль управления стрелой, который указывает на более низкое положение стрелы, чем другой профиль управления стрелой, также можно называть более низким профилем управления стрелой.
На фиг. 2 показан пример маршрута 200, которым рабочая машина 100 может двигаться из начальной точки 202, чтобы достигнуть груды материала 204.
Позицией 208 показано местоположение, в котором должна начаться погрузка и которое используется в качестве базисного местоположения.
Теперь, согласно одному из аспектов настоящего изобретения, на фиг. 4 иллюстрируется пример способа загрузки ковша. В этом примере имеется набор профилей управления ковшом и набор профилей управления стрелой. У всех профилей управления ковшом в наборе профилей управления ковшом может быть по существу близкая друг с другом форма, или же они могут отличаться по форме, и они указывают положения ковша, которые находятся на расстоянии от соответствующих положений ковша, обозначенных другим профилем управления ковшом. Соответственно, у всех профилей управления стрелой в наборе профилей управления стрелой может быть по существу одинаковая друг с другом форма, или же они могут отличаться по форме, и они указывают положения стрелы, которые находятся на расстоянии от соответствующих положений стрелы, обозначенных другим профилем управления стрелой. Кроме того, значения профилей управления могут быть ограничены крайними пределами перемещений ковша и стрелы. Другими словами, профиль управления ковшом не включает значения, которые выходят за пределы перемещения ковша, а профиль управления стрелой не включает значения, которые выходят за пределы перемещения стрелы.
Можно иметь профили управления, зависящие от местоположения. Кроме того, можно определить крайние пределы перемещений ковша и стрелы на основе окружающей среды, в которой предстоит работать рабочей машине 100. Например, может возникнуть ситуация, когда крыша туннеля или шахты может задавать самую высокую точку подъема для ковша 106 и стрелы 104. Другими словами, может быть предпочтительно, чтобы ковш 106 и стрела 104 не касались перекрытия. Высота окружающей среды (например, туннеля или шахты) может меняться, при этом крайние пределы также могут меняться в различных местах окружающей среды.
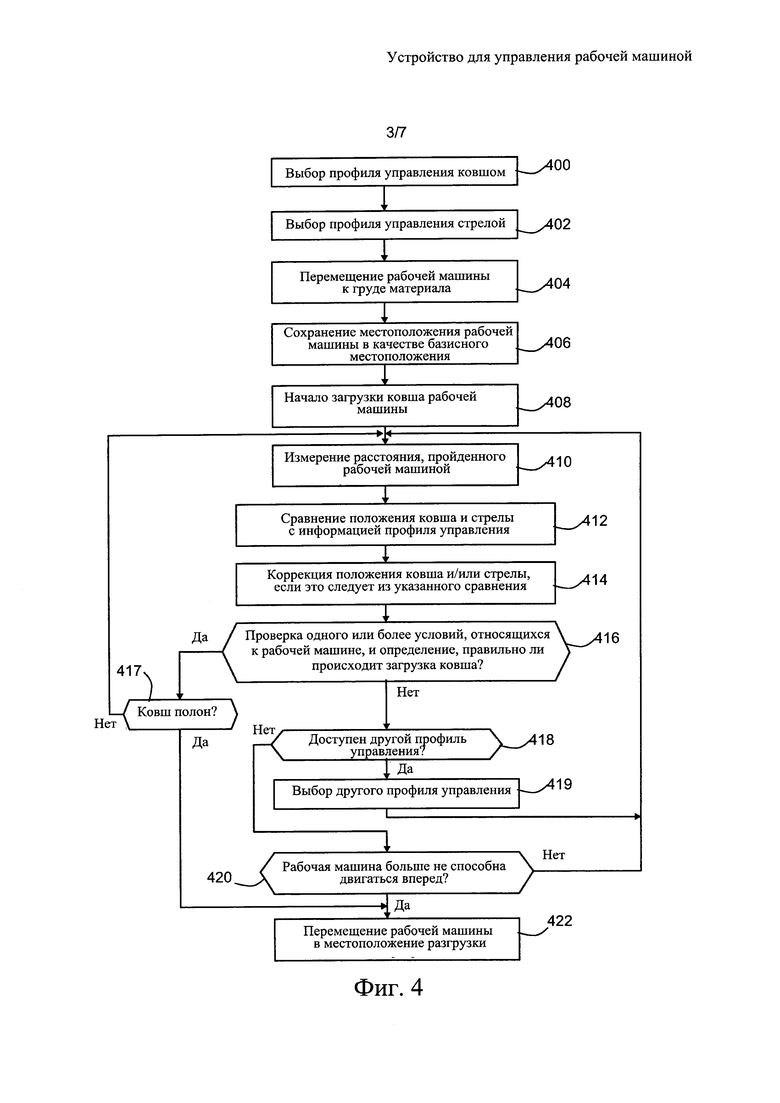
В еще одном из вариантов выполнения способа выбирают 400 один профиль управления ковшом из набора профилей управления ковшом и выбирают 402 один профиль управления стрелой из набора профилей управления стрелой. Этот выбор профиля (профилей) управления может быть основан на некоторых параметрах рабочей машины 100, свойствах погружаемого материала, окружающей среды, где работает рабочая машина 100, и т.д. В качестве неограничивающего примера различные виды профилей управления могут быть подготовлены для различных видов материалов, и/или для различным размеров груд материалов, и/или для различных видов шахт, мест нахождения раскопок, мест нахождений конструкций и т.д.
Рабочая машина 100 может изначально не быть расположена около груды загружаемого материала, а может перемещаться 404 к груде материала. Это может быть осуществлено, например, управляющим блоком 114, который может использовать информацию о среде, окружающей рабочую машину 100, информацию о местоположении груды материала 204 и информацию о местоположении рабочей машины 100. Альтернативно или дополнительно в управляющий блок 114 может передаваться (храниться в нем) информация о маршруте к груде материала 204, так чтобы этот блок мог управлять перемещением рабочей машины 100 по этому маршруту.
Как только рабочая машина 100 приблизилась к груде материала, местоположение рабочей машины 100 может быть сохранено 406 в памяти в качестве базисного местоположения 208. Другими словами, в этом примере базисное местоположение 208 представляет собой местоположение рабочей машины 100, когда она находится перед грудой материала. Следует отметить, что базисное местоположение не обязано быть представлено как абсолютное местоположение рабочей машины 100, но можно также быть выражено другим способом, чтобы управляющий блок мог определить, как далеко рабочая машина 100 переместилась от базисного местоположения во время погрузки.
Управляющий блок может дать команду рабочей машине 100 начать загрузку 408. Это означает, что запускают механический исполнительный механизм рабочей машины 100, и колеса или другие элементы, предназначенные для перемещения рабочей машины 100, пытаются переместить рабочую машину 100 к груде материала 204, при этом ковш 106 начинает собирать материал из груды материала 204. Во время погрузки измеряют 410 расстояние, пройденное рабочей машиной 100. Через некоторые интервалы сравнивают 412 текущее положение ковша и стрелы с указанием положения, даваемым профилем управления ковшом и профилем управления стрелой соответственно на измеренном расстоянии относительно базисного местоположения. Эту информацию можно затем использовать для коррекции 414 положения ковша и/или стрелы и приведения его в соответствие с выбранным профилем управления ковшом/стрелой. Кроме того, управляющий блок проверяет 416 одно или более условий, связанных с рабочей машиной во время погрузки. Если какое-либо из проверенных условий показывает, что погрузка идет не по плану, управляющий блок может проверить 418, доступен ли другой профиль управления, и если да, принимает решение выбрать 419 другой профиль управления ковшом и/или стрелой и продолжить работу, например, на шаге 410. Решение о том, какой профиль управления использовать, зависит, помимо прочего, от проверенного условия. Ниже описаны некоторые неограничивающие примеры таких условий.
Если на шаге 418 проверка показало, что больше нет доступных профилей управления, управляющий блок может проверить 420, возможно ли движение рабочей машины вперед. Если невозможно, то управляющий блок может дать команду 422 рабочей машине переместиться в местоположение разгрузки.
С другой стороны, если на шаге 416 определено, что загрузка, по-видимому, продолжается по плану, управляющий блок может проверить 417, полон ли уже ковш, и, если да, управляющий блок может дать команду 422 рабочей машине переместиться в местоположение разгрузки. В противном случае управляющий блок может продолжить загрузку ковша, например, повторяя операции на шаге 410.
Чтобы измерить скорость рабочей машины, управляющий блок 114 или некоторое другое устройство может принимать информацию из одного или более датчиков скорости. В дополнение к датчикам 136 скорости или вместо них скорость рабочей машины можно измерить на основе данных о местоположении рабочей машины 100. Например, рабочая машина 100 может содержать одно или более сканирующих устройств 126, таких как лазерные сканирующие устройства, которые могут предоставить информацию, подходящую для использования при измерении скорости. Другой пример подходящего оборудования включает устройство, такое как GPS-приемник (стандарта Системы глобального позиционирования) и тахеометр. Если измеренная скорость указывает, что рабочая машина 100 остановилась, можно выбрать другой профиль управления ковшом, так чтобы ковш 106 переместился вверх (то есть, выбрать более высокий профиль управления ковшом). Если рабочая машина 100 все еще не двигается, можно выбирать еще более высокий профиль управления ковшом до тех пор, пока рабочая машина не начтет снова двигаться, или пока не кончатся более высокие профили управления ковшом, или ковш 106 не достигнет наивысшего допустимого положения. Если более высоких профилей управления ковшом не существует или ковш 106 достиг своего наивысшего допустимого положения, для разрешения ситуации загрузку можно остановить или попробовать другой профиль управления стрелой.
Может произойти так, что рабочая машина 100 не полностью остановилась, но скорость рабочей машины 100 становится слишком низкой, то есть падает ниже первого порога скорости. В этом случае можно выбрать другой профиль управления ковшом так, чтобы ковш переместился вверх (то есть, выбрать более высокий профиль управления ковшом). Если рабочая машина 100 все еще перемещается слишком медленно, можно выбирать еще более высокий профиль управления ковшом до тех пор, пока скорость рабочей не поднимется выше первого порога скоростей.
С другой стороны, если измеренная скорость указывает, что скорость рабочей машины 100 становится слишком высокой, то есть превышает второй порог скорости, можно выбрать другой профиль управления ковшом, так чтобы ковш переместился вниз (то есть, выбрать более низкий профиль управления ковшом). Если рабочая машина 100 все еще перемещается слишком быстро, можно выбирать еще более низкий профиль управления ковшом до тех пор, пока скорость рабочей машины не упадет ниже второго порога скоростей.
Управляющий блок 114 может принимать информацию о скорости вращения колес рабочей машины 100. Если эта информация указывает, что имеется разница в скорости вращения двух или более колес рабочей машины 100, управляющий блок 114 может принять решение, что по меньшей мере одно колесо пробуксовывает, а это может означать, что сила, действующая со стороны груды материала на рабочую машину 100, слишком велика. Следовательно, управляющий блок может изменить эту ситуацию, выбирая более высокое положение ковша 106. В этом примере может быть выбран более высокий профиль управления ковшом.
Пробуксовывание колес может также произойти так, что скорость вращения каждого колеса почти одинаковая, но скорость рабочей машины 100 равна нулю или почти нулю. И в этом случае можно выбрать более высокий профиль управления ковшом.
Управляющий блок 114 может также принимать информацию о положении ковша 106. Следовательно, управляющий блок 114 может, после выдачи команды исполнительным механизмам на перемещение ковша 106 в более высокое положение, задаваемое профилем управления ковшом, проверить, достиг ли ковш этого более высокого положения. Если проверка показывает, что ковш неспособен переместиться в более высокое положение, управляющий блок 114 может попытаться решить эту проблему, выбирая более низкий профиль управления стрелой, чтобы переместить стрелу вниз. Если ковш все еще не в состоянии достигнуть более высокого положения, загрузку можно остановить или можно переместить стрелу в еще более низкое положение.
Как сказано выше, загрузка ковша 106 может быть остановлена, когда ковш становится полным или когда изменение профиля управления ковшом и/или профиля управления стрелой не позволяет рабочей машине 100 двигаться дальше. Тогда рабочую машину 100 можно перевести 422 в местоположение разгрузки, чтобы опорожнить ковш 106, и при необходимости можно вновь приступить к операции загрузки.
Здесь следует отметить, что проверка, заполнен ли ковш или нет, не обязательно имеет место в местоположении, обозначенном на фиг. 4, но может производиться и на другой стадии. Возможно также, чтобы управляющий блок проверял заполнение ковша на нескольких различных стадиях во время процесса загрузки.
В еще одном варианте выполнения настоящего изобретения, когда управляющий блок принял решение, что загрузка должна быть остановлена, например, потому что ковш 106 полон или рабочая машина 100 неспособна продолжить операцию загрузки, может иметься возможность взвесить рабочую машину 100, чтобы определить вес материала, загруженного в ковш 106. Эта информация может затем использоваться для принятия решения, пытаться ли продолжить операцию загрузки, или вести рабочую машину 100 к местоположению разгрузки для опорожнения ковша 106, или вызвать оператора, чтобы например, начать ручное управление рабочей машиной 100, или совершить некоторые другие действия, чтобы решить возможную проблему, возникшую при автоматической загрузке.
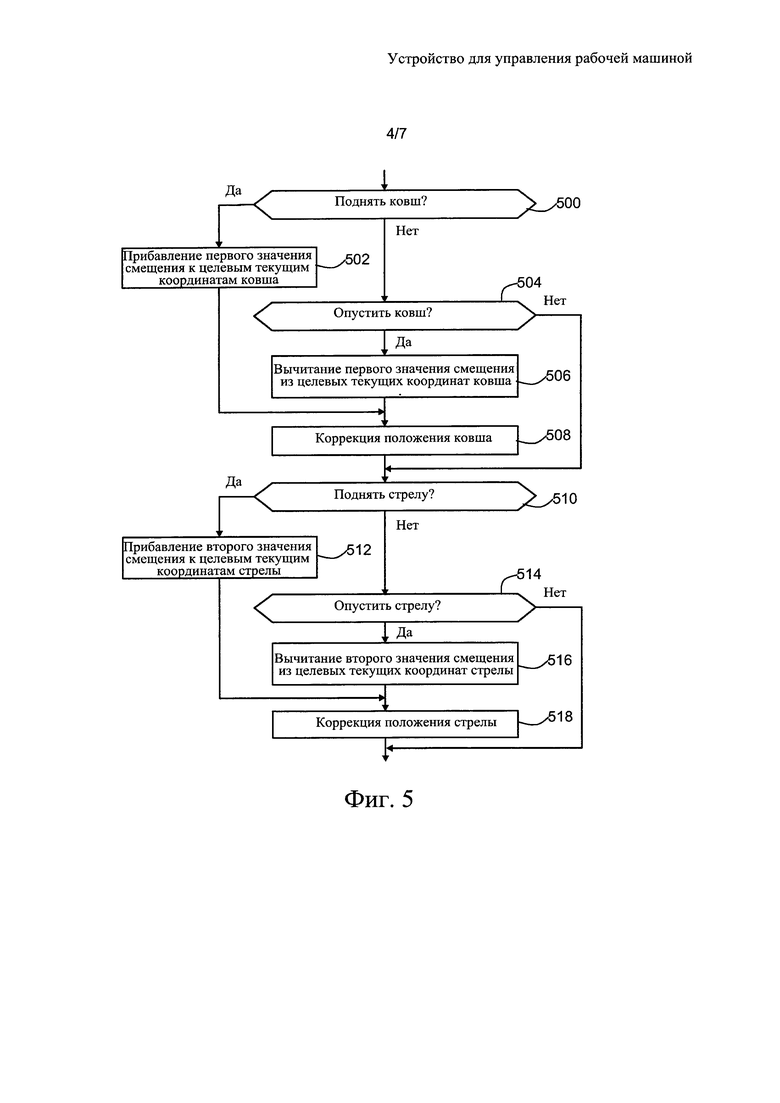
В другом варианте выполнения настоящего изобретения нет необходимости в наборе различных профилей управления ковшом и наборе различных профилей управления стрелой, а достаточно только одного профиля управления ковшом и одного профиля управления стрелой, при этом, если определено, что положение ковша и/или стрелы нужно изменить по сравнению с тем, как указано в профиле управления, вместо более высокого и более низкого профилей управления можно использовать одно или более значений смещения, как будет показано ниже со ссылкой на фиг. 5.
Если определено 500, что ковш 106 необходимо поднять в более высокое положение, можно прибавить 502 первое значение смещения к текущим целевым координатам ковша, задаваемым профилем управления, и положение ковша 106 корректируют 508 соответственно. С другой стороны, если определено 504, что ковш 106 необходимо опустить в более низкое положение, можно вычесть 506 первое значение смещения из текущих целевых координат ковша, задаваемых профилем управления, и положение ковша 106 корректируют 508 соответственно. Аналогично, если определено что стрелу 104 необходимо поднять 510 в более высокое положение или опустить 512 в более низкое положение, второе значение смещения может быть прибавлено 514 или вычтено 516 из текущих целевых координат стрелы, задаваемых профилем управления, и положение стрелы 104 корректируют 518 соответственно. Следовательно, в этом варианте выполнения настоящего изобретения может быть необходим только один профиль управления.
Следует отметить, что на различных шагах могут использоваться различные значения смещения. Например, когда ковш 106 нужно поднять выше, чем задает профиль управления, можно использовать одно значение смещения, и когда ковш 106 должен быть опущен ниже, чем задает профиль управления, вместо него можно использовать другое значение смещения.
Когда положение ковша 106 или стрелы 104 корректируют еще дальше от положения, определяемого профилем управления, инкремент/декремент при каждом изменении может быть константой, то есть значение смещения прибавляют N раз, где N - целое число, превышающее единицу, или же этот инкремент/декремент может быть различным. Например, первый инкремент/декремент может быть равным значению смещения, но следующие инкременты/декременты могут быть больше или меньше значения смещения. Для пояснения этого момента ниже работа описана подробнее.
Предположим, что ковш 106 и стрела 104 следуют базовому профилю управления, то есть они помещаются согласно положениям, обозначенным базовым профилем управления, по мере того, как рабочая машина 100 перемещается к груде материала 204. Если в некотором состоянии определено, что загрузка не может быть продолжена при следовании базовому профилю управления, положение ковша 106 и/или стрелы 104 можно скорректировать, добавляя/вычитая значение смещения относительно значения профиля управления. Если это изменение не позволяет продолжить загрузку, положение ковша 106 и/или стрелы 104 можно еще больше скорректировать, вторично добавляя/вычитая значение смещения относительно значения профиля управления, или добавляя/вычитая значение смещения, умноженное на коэффициент К (К>1) относительно значения профиля управления. Следует отметить, что значение смещения и множитель К не обязаны быть одинаковыми для корректировки ковша 106 и стрелы 104.
При подаче команд исполнительному механизму (механизмам) для перемещения ковша 106 и/или стрелы 104 управляющий блок 114 может принимать сигналы обратной связи из исполнительных механизмов (или из датчиков, указывающих целевые текущие координаты ковша/стрелы), чтобы определить, достиг ли ковш 106 и/или стрела 104 их целевого положения (положений). Следовательно, управляющий блок 114 может также использовать эту информацию для определения, что ковш 106 или стрела 104 не в состоянии достичь целевого положения. Перемещения ковша 106 и стрелы 104 требуют некоторого времени. Поэтому во избежание ложных индикаций, может быть необходимо определить запаздывание между посылкой команды в исполнительный механизм для изменения положения ковша 106 или стрелы 104 и получением фактического положения ковша 106 или стрелы 104 соответственно.
Может произойти так, что в профиле управления имеет место относительно большой шаг (изменение положении ковша/стрелы). Поэтому ковш 106 или стрела 104 могут быть не в состоянии изменить свое положение очень быстро, при этом управляющий блок 114 может ошибочно сделать вывод, что ковш/стрела заблокированы и необходима корректирующая операция. В ситуации такого рода большой шаг может быть разделен на большее количество малых шагов, например, с помощью интерполяции, и/или можно увеличить вышеуказанное запаздывание.
Ниже со ссылкой на фиг. 6 иллюстрируется еще один вариант выполнения настоящего изобретения. В этом случае вместо отдельных профилей управления для ковша и стрелы может использоваться один и тот же профиль управления. В этом случае профили управления включают целевые текущие координаты как для ковша, так и для стрелы относительно базисного местоположения. Первоначально, в начале загрузки выбирают 600 базовый профиль управления. Во время загрузки положение ковша и стрелы корректируют 602 соответственно, пока не определено, что положение ковша и/или стрелы должно быть изменено другим способом, чем указано в профиле управления. В таком случае, если определено 604, что ковш должен быть поднят в более высокое положение, к текущим координатам цели ковша можно прибавить 606 первое значение смещения, указанное в профиле управления, и положение ковша корректируют 608 соответственно. С другой стороны, если определено 610, что ковш должен быть опущен в более низкое положение, из целевых текущих координат ковша можно вычесть 612 первое значение смещения, указанное в профиле управления, и положение ковша корректируют 608 соответственно. Аналогично, если определено, что стрела должна быть поднята 614 в более высокое положение или опущена 620 в более низкое положение, к текущим координатам стрелы можно прибавить 616 или вычесть 620 из нее второе значение смещения, указанное в профиле управления, и положение стрелы корректируют 618 соответственно. Следовательно, в этом варианте выполнения настоящего изобретения может быть необходим только один профиль управления.
Целевые текущие координаты ковша и стрелы могут быть выражены в профиле (профилях) управления, например, как процент от крайнего положения. Однако следует отметить, что управляющие данные для ковша и стрелы могут быть определены многими различными способами.
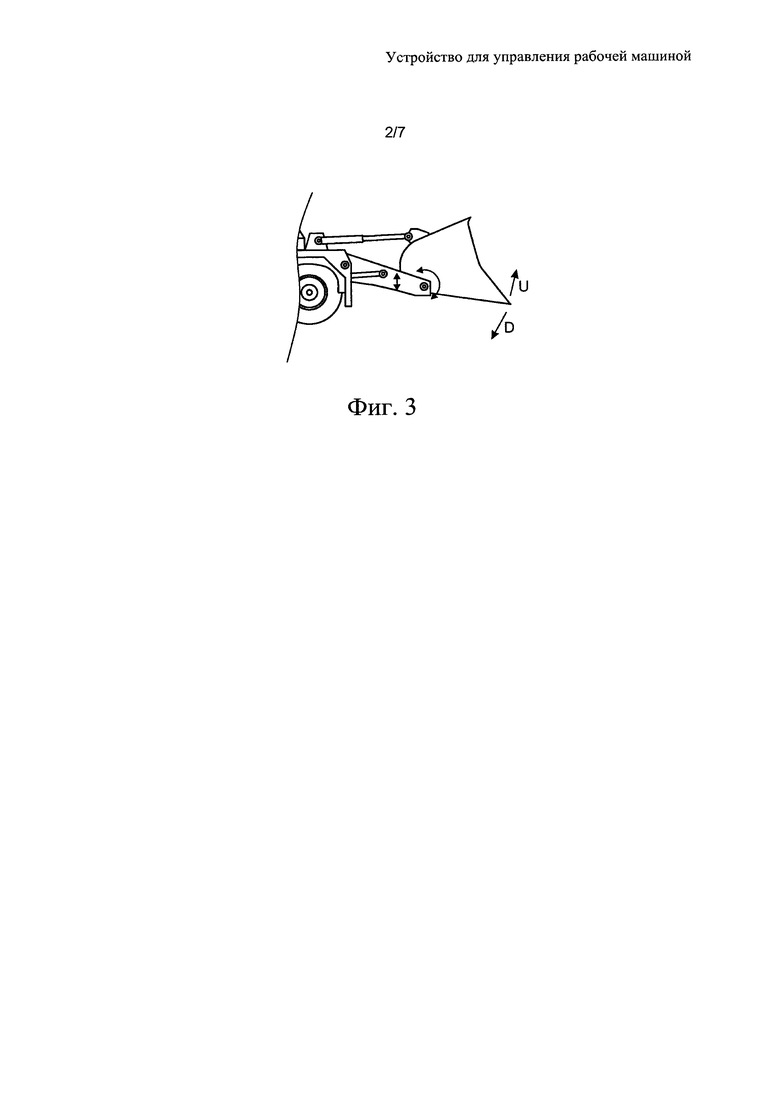
В вышеуказанных примерах положение ковша было обозначено как угол поворота относительно базисного положения. Базисное положение может быть положением, в которое ковш помещен в начале загрузки ковша. Например, базисное положение может составлять нуль градусов, то есть дно ковша лежит в горизонтальном направлении. Подъем ковша может означать, что ковш поворачивается так, что передний его край идет вверх (показано стрелкой U на фиг. 3), а опускание ковша - что ковш поворачивается таким образом, что передний край ковша двигается вниз (показано стрелкой D на фиг. 3). При подъеме и опускании стрелы рабочая машина может попытаться поддерживать ориентацию ковша 106 относительно земли. Следовательно, изменение положения стрелы 104 также может вызвать изменение углового положения ковша 106 относительно стрелы 104.
На фиг. 7а и 7b, на которых показаны некоторые примеры профилей управления, координата х представляет расстояние от базисного местоположения (х=0), а координата у представляет относительное положение ковша/стрелы, так что значение 0% означают самое низкое положение, а значение 100% означает максимально высокое положение ковша/стрелы. На фиг. 7а и 7b позицией 702 показан профиль управления ковшом, а позицией 704 показан профиль управления стрелой.
На фиг. 8 показан пример изменения профиля управления ковшом во время работы рабочей машины. Выбранный базовый профиль управления ковшом показан линией 802, профиль управления ковшом выше базового профиля управления ковшом показан линией 804, и профиль управления ковшом ниже базового профиля управления ковшом показан линией 806. Линия 808 показывает выбранный профиль управления ковшом в различные моменты времени во время загрузки. Стрелки 810 указывают местоположения, в которых был изменен профиль управления ковшом. Можно заметить, что загрузка начата с базового профиля управления ковшом. На расстоянии 0,4 м принят к использованию профиль управления ковшом выше базового профиля управления ковшом. На расстоянии 0,8 м принят к использованию профиль управления ковшом ниже базового профиля управления ковшом. На расстоянии 1,3 м вновь принят к использованию базовый профиль управления ковшом.
В дополнение к положению ковша и положению стрелы профиль управления может управлять и некоторыми другими параметрами. Например, в еще одном варианте выполнения настоящего изобретения мощностью двигателя 130 и/или давлением воздуха в колесах 134 рабочей машины 100 можно управлять для повышения эффективности загрузки. Например, если обнаружено, что рабочей машине 100 грозит остановка, двигателем 130 можно управлять, увеличивая его мощность, а если рабочая машина 100 не начинает двигаться, то можно изменить положение ковша 106 и/или стрелы 104. С другой стороны, если обнаружено, что одно или более колес 134 начинают пробуксовывать, двигателем 130 можно управлять так, чтобы уменьшить мощность, или можно уменьшить давление воздуха в колесах 134, и если колесо (колеса) 134 все еще пробуксовывают, то можно изменить положение ковша 106 и/или стрелы 104.
Ниже в качестве примера более подробно описан еще один вариант формирования профиля управления, который будет использоваться в качестве базового профиля управления ковшом и профиля управления стрелой. В этом варианте выполнения настоящего изобретения для ковша и стрелы сформированы отдельные профили управления, то есть, сформированы профиль управления ковшом и профиль управления стрелой. Профили управления формируют, выполняя учебные действия рабочей машиной 100, при этом управляющее устройство может использоваться для приема информации от оператора, который выполняет процесс обучения, и от датчиков рабочей машины, чтобы определить, помимо прочего, положение ковша 106, стрелы 104 и местоположение рабочей машины 100 в различные моменты времени во время процесса обучения. Оператор приступает к процессу обучения, ведя рабочую машину 100 к груде материала, при этом оператор сообщает управляющему устройству, что рабочая машина находится теперь в базисном местоположении. Следовательно, управляющее устройство может определить текущее местоположение и сохранить его в качестве базисного местоположения. Кроме того, для запуска процесса обучения оператор перемещает ковш 106 и стрелу 104 в желаемое положение. Это положение не обязательно представляет собой самое низкое положение ковша 106 и/или стрелы 104, но может также быть другим положением, которое оператор считает подходящим на основе своего предыдущего опыта при загрузке такой рабочей машины 100. Затем, оператор начинает перемещать рабочую машину 100 и при необходимости регулирует положение ковша 106 и стрелы 104. Управляющее устройство принимает информацию о местоположении рабочей машины и информацию об изменениях положений ковша 106 и стрелы 104. Следовательно, управляющее устройство может сформировать профили управления, сохраняя значения положения ковша и стрелы и соответствующие значения местоположения (относительно базисного местоположения). Эти значения могут быть сохранены, например, через заданные интервалы расстояния, то есть новое значение положения ковша/стрелы сохраняют каждый раз, когда рабочая машина продвинулась на определенное расстояние, или новое значение записывают, когда положение ковша/стрелы изменилось больше, чем заданный порог. Эти значения могут быть сохранены в виде таблицы значений х, у или в виде другого подходящего массива. Этот процесс сохранения значений можно повторять, например, пока рабочая машина 100 не переместилась на достаточное расстояние, чтобы заполнить ковш 106, или пока у оператора не появятся другие причины завершить процесс обучения: например, рабочая машина 100 достигла другого конца груды материала. Сохраненные значения представляют собой профиль управления ковшом и профиль управления стрелой. Следовательно, навыки самого опытного оператора можно использованы в нескольких рабочих машинах, работающих в одном или большем количестве мест, или же операторы могут создать собственные персональные профили для рабочих машин, за которые они отвечают.
Вышеописанный «процесс обучения» можно повторить, и, например, вычислить усредненный профиль управления для различных обучающих процессов, при этом для определения профиля управления можно использовать средние значения.
Можно также повторить вышеописанный «процесс обучения» при использовании различных видов материалов, при этом, например, усредненный профиль управления для различных обучающих процессов с различными видами материалов может представлять собой базовый профиль управления, или можно сформировать отдельный базовый профиль управления для каждого вида материала, используемого во время процесса обучения.
В еще одном примере базовый профиль (профили) управления может быть сформирован путем компьютерного программирования. Оператор может использовать, например, графический интерфейс пользователя и применить программное обеспечение для создания кривых, соответствующих профилям управления на дисплее, а программное обеспечение пересчитает полученные кривые в профили управления, которые сохранятся в памяти 142 управляющего устройства рабочей машины 100.
В вариантах выполнения настоящего изобретения, в которых сформирован один или более наборов профилей управления, каждый профиль управления в наборе может быть сформирован на основе базового профиля управления. Например, профили управления выше базового профиля управления могут быть сформированы путем прибавления некоторого значения или кратного этому значению к значениям для базовому профиля управления, а профили управления ниже базового профиля управления могут быть сформированы путем вычитания некоторого значения или кратного этому значению из значений для базового профиля управления. Однако для формирования наборов профилей управления можно использовать и другие принципы.
Можно также построить множество базовых профилей управления для различных видов материалов. Например, один базовый профиль управления может быть сформирован для руды, другой базовый профиль управления может быть сформирован для щебня, еще один базовый профиль управления может быть сформирован для песка и т.д. Следовательно, оператор рабочей машины 100 может выбрать среди нескольких профилей управления тот базовый профиль управления, который больше подходит к загружаемому материалу.
В еще одном варианте выполнения настоящего изобретения, если оператор рабочей машины обнаруживает, что выбранный базовый профиль управления не подходит для загрузки материла, оператор может выбрать другой профиль управления, который будет использоваться в качестве базового профиля управления во время загрузки.
В еще одном варианте выполнения настоящего изобретения эффективность профиля управления могут быть получена с помощью обратной связи во время использования. Например, оператор рабочей машины может заметить, какой профиль управления является самым подходящим для определенного вида материала, при этом этот профиль управления может быть определен в качестве предпочтительного базового профиля управления для этого материала. Другой пример: обратная связь для эффективности профилей управления во время использования может быть получена интегрально из различных ситуаций с использованием этих профилей, при этом можно выяснить, какой профиль управления лучше всего подходит для загрузки определенного вида материала.
В еще одном варианте выполнения настоящего изобретения обратная связь может быть получена на основе реальных рабочих ситуаций, так чтобы профили управления можно было адаптировать для наилучшего использования с определенным видом материала. Оператор рабочей машины может заметить, что выбранный профиль управления не работает должным образом, при этом оператор может адаптировать некоторые части профиля управления. Информация о коррекции профиля управления может затем быть передана в место, где эти профили управления хранятся, например, в диспетчерскую, и профиль управления может быть скорректирован соответственно.
В еще одном варианте выполнения настоящего изобретения профиль (профили) управления могут быть настраиваемыми, например, так, чтобы можно было добавить условия/параметры к существующим и/или чтобы можно было выбрать, какие условия/параметры следует принять во внимание при использовании данного профиля управления. Таким образом, профиль (профили) управления могут быть скорректированы для различных видов или мест загрузки и ситуаций во время загрузки.
Для отображения профиля управления оператору рабочей машины 100 может использоваться дисплей 154. Следовательно, оператор может, например, обнаружить, что в определенном местоположении необходим определенный вид перемещения, при этом эту информацию можно использовать для того, чтобы при необходимости соответственно скорректировать профиль управления. Другой пример: оператор может использовать устройство (устройства) 156 ввода для коррекции профиля управления, показанного на дисплее 154, если этот оператор заметил, что необходимо внести некоторые изменения в профиль управления.
Специалистам будет очевидно, что любой из вариантов выполнения настоящего изобретения, описанных выше, может быть осуществлен как комбинация из одного или более других вариантов выполнения настоящего изобретения, если явно или неявно не сформулировано, что определенные варианты выполнения настоящего изобретения альтернативы друг другу.
Различные варианты выполнения настоящего изобретения могут быть осуществлены с помощью компьютерного программного кода, который хранится в памяти и заставляет соответствующие устройства выполнять действия согласно изобретению. Например, рабочая машина может содержать электрическую схему и электронные элементы для обработки, приема и передачи данных, компьютерный программный код в памяти и процессор, который, выполняя компьютерный программный код, заставляет машину осуществлять действия согласно вариантам выполнения настоящего изобретения.
Различные варианты выполнения настоящего изобретения могут быть реализованы как дополнительные функциональные модули в рабочей машине - предпочтительно, чтобы эти модули были сменными. Эти модули могут быть осуществлены как технические средства, программное обеспечение или их комбинация. Некоторые из функциональных элементов вместо того, чтобы быть расположенными в рабочей машине 100 или в дополнении к этому, могут быть расположенными вне рабочей машины 100, например в компьютере управляющей станции 124.
Очевидно, что нестоящее изобретение не ограничено исключительно описанными выше вариантами выполнения настоящего изобретения, но может быть модифицировано в рамках формулы изобретения.
Изобретение относится к рабочим машинам, в частности к управлению загрузкой ковша рабочей машины. Техническим результатом является повышение эффективности загрузки ковша. В частности, раскрыт способ управления загрузкой материала в ковш (106) рабочей машины (100) из груды материала (204). Способ включает выбор профиля управления, который будет использован в качестве базового профиля управления и содержит указания для положений ковша (106) и/или стрелы (104) рабочей машины (100) как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения; получение информации о расстоянии, пройденном рабочей машиной (100) при загрузке материала в ковш (106); проверку по меньшей мере одного условия, относящегося к рабочей машине (100), во время загрузки, и определение на основе указанного проверенного условия, следует ли использовать другое положение, нежели указанное в выбранном профиле управления, для ковша и/или стрелы. Если определено, что следует использовать другое положение ковша и/или стрелы, нежели указанное в выбранном профиле управления, способ дополнительно включает выбор указанного другого положения. Кроме того, раскрыты устройство, компьютерный носитель и рабочая машина. 4 н. и 11 з.п. ф-лы, 10 ил.
1. Способ управления загрузкой материала в ковш рабочей машины из груды материала, включающий:
a) выбор профиля управления ковшом из набора профилей управления ковшом в качестве базового профиля управления ковшом, который содержит указания для положений ковша рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения;
b) выбор профиля управления стрелой из набора профилей управления стрелой в качестве базового профиля управления стрелой, который содержит указания для положений стрелы рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения;
c) получение информации о расстоянии, пройденном рабочей машиной относительно базисного местоположения при загрузке материала в ковш;
d) сравнение, через интервалы расстояния, пройденного рабочей машиной, положения ковша и/или стрелы с положением, указанным в выбранном профиле управления;
e) проверку по меньшей мере одного условия, относящегося к рабочей машине, во время загрузки;
f) определение на основе указанного сравнения и проверенного условия, следует ли выбрать другой профиль управления для ковша и/или стрелы; и
g) если да, выбор указанного другого профиля управления для ковша и/или стрелы.
2. Способ по п. 1, дополнительно включающий перемещение рабочей машины к груде материала прежде, чем приступить к шагу (с), и установление базисного местоположения в соответствии с этим местоположением рабочей машины.
3. Способ по п. 1 или 2, в котором определена иерархия для профилей в наборе профилей управления, при этом имеется один или более профилей управления по меньшей мере выше или ниже в иерархии относительно базового профиля управления, и указанный способ дополнительно включает выбор профиля управления, который является профилем управления либо выше, либо ниже в иерархии относительно базового профиля управления.
4. Способ по любому из пп. 1-3, в котором указанное по меньшей мере одно условие, относящееся к рабочей машине, включает по меньшей мере одно из следующего:
скорость рабочей машины;
разность скоростей двух или более колес рабочей машины;
пробуксовывание одного или более колес рабочей машины;
неспособность ковша переместиться в положение, указанное профилем управления.
5. Способ по п. 4, включающий одно или более из следующего:
если рабочая машина прекращает перемещение вперед, то для ковша выбирают положение выше положения, указанного текущим профилем управления ковшом, пока рабочая машина не начнет перемещаться вперед или пока больше не останется положений ковша выше настоящего положения;
если скорость рабочей машины замедляется ниже первого порога, то выбирают для ковша положение выше положения, указанного текущим профилем управления ковшом;
если по меньшей мере одно из колес пробуксовывает, то для стрелы выбирают положение выше положения, указанного текущим профилем управления стрелой, а для ковша выбирают положение ниже положения, указанного текущим профилем управления ковшом;
если скорость рабочей машины превышает второй порог, то для ковша выбирают положение ниже положения, указанного текущим профилем управления ковшом;
если ковш не поднимается до положения, указанного выбранным профилем управления, для стрелы выбирают положение ниже положения, указанного текущим профилем управления стрелой.
6. Способ по любому из пп. 1-5, в котором базовый профиль управления формируют, выполняя процесс обучения рабочей машины и записывая информацию о положении ковша, или стрелы, или их обоих на различных расстояниях в базовый профиль управления.
7. Способ по п. 6, в котором набор профилей управления формируют из базового профиля управления путем добавления значения смещения к значениям базового профиля управления или вычитания значения смещения из значений базового профиля управления.
8. Способ по любому из пп. 1-7, в котором:
профили управления ковшом выше базового профиля управления ковшом указывают положения ковша, которые выше, чем положение ковша, указанное в базовом профиле управления ковшом, на том же самом расстоянии от базисного местоположения,
профили управления ковшом ниже базового профиля управления ковшом указывают положения ковша, которые ниже, чем положение ковша, указанное в базовом профиле управления ковшом, на том же самом расстоянии от базисного местоположения,
профили управления стрелой выше базового профиля управления стрелой указывают положения стрелы, которые выше, чем положение стрелы, указанное в базовом профиле управления стрелой, на том же самом расстоянии от базисного местоположения, и
профили управления стрелой ниже базового профиля управления стрелой указывают положения стрелы, которые ниже, чем положение стрелы, указанное в базовом профиле управления стрелой, на том же самом расстоянии от базисного местоположения.
9. Способ по любому из пп. 1-8, в котором шаг (g) включает одно или более из следующего:
если рабочая машина прекращает перемещение вперед, выбор профиля управления ковшом выше текущего профиля управления ковшом до тех пор, пока рабочая машина не начнет перемещаться вперед или пока больше не останется профилей управления ковшом выше текущего профиля;
если скорость рабочей машины замедляется ниже первого порога, то выбирают профиль управления ковшом выше текущего профиля управления ковшом;
если по меньшей мере одно из колес пробуксовывает, то выбирают профиль управления стрелой выше текущего профиля управления стрелой, а профиль управления ковшом выбирают ниже текущего профиля управления ковшом;
если скорость рабочей машины превышает второй порог, то профиль управления ковшом выбирают ниже текущего профиля управления ковшом;
если ковш не поднимается до положения, указанного выбранным профилем управления ковшом, то выбирают профиль управления стрелой ниже текущего профиля управления стрелой.
10. Способ по любому из пп. 1-9, дополнительно включающий: определение, следует ли корректировать положение ковша и/или стрелы, на основе выбранного профиля управления и измеренного расстояния.
11. Устройство для управления загрузкой материала в ковш рабочей машины из груды материала, выполненное с возможностью осуществлять:
a) выбор профиля управления ковшом из набора профилей управления ковшом в качестве базового профиля управления ковшом, который содержит указания для положений ковша рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения;
b) выбор профиля управления стрелой из набора профилей управления стрелой в качестве базового профиля управления стрелой, который содержит указания для положений стрелы рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения;
c) получение информации о расстоянии, пройденном рабочей машиной относительно базисного местоположения при загрузке материала в ковш;
d) сравнение, через интервалы расстояния, пройденного рабочей машиной, положения ковша и/или стрелы с положением, указанным в выбранном профиле управления;
e) проверку по меньшей мере одного условия, относящегося к рабочей машине, во время загрузки;
f) определение на основе указанного сравнения и проверенного условия, следует ли выбрать другой профиль управления для ковша и/или стрелы; и
g) выбор указанного другого профиля управления, если шаг (f) показал, что следует выбрать другой профиль управления для ковша и/или стрелы.
12. Устройство по п. 11, которое дополнительно выполнено с возможностью перемещения рабочей машины к груде материала прежде, чем приступить к шагу (с), и установления базисного местоположения в соответствии с этим местоположением рабочей машины.
13. Носитель информации, содержащий компьютерный программный код, предназначенный для осуществления загрузки материала в ковш рабочей машины из груды материала, при этом указанный компьютерный программный код при его выполнении процессором заставляет устройство выполнять следующее:
а) выбор профиля управления ковшом из набора профилей управления ковшом в качестве базового профиля управления ковшом, который содержит указания для положений ковша рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения;
b) выбор профиля управления стрелой из набора профилей управления стрелой в качестве базового профиля управления стрелой, который содержит указания для положений стрелы рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения;
c) получение информации о расстоянии, пройденном рабочей машиной относительно базисного местоположения при загрузке материала в ковш;
d) сравнение, через интервалы расстояния, пройденного рабочей машиной, положения ковша и/или стрелы с положением, указанным в выбранном профиле управления;
e) проверку по меньшей мере одного условия, относящегося к рабочей машине, во время загрузки;
f) определение на основе указанного сравнения и проверенного условия, следует ли выбрать другой профиль управления для ковша и/или стрелы; и
g) выбор указанного другого профиля управления, если шаг (f) показал, что следует выбрать другой профиль управления для ковша и/или стрелы.
14. Рабочая машина, содержащая ковш, прикрепленный к стреле, для загрузки материала в ковш из груды материала, при этом рабочая машина содержит:
- профиль управления ковшом для использования в качестве базового профиля управления ковшом, который содержит указания для положений ковша рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения;
- профиль управления стрелой для использования в качестве базового профиля управления стрелой, который содержит указания для положений стрелы рабочей машины как функцию расстояния, пройденного рабочей машиной относительно базисного местоположения;
- оборудование для получения информации о расстоянии, пройденном рабочей машиной относительно базисного местоположения во время загрузки материала в ковш;
- оборудование для контроля условий, предназначенное для контроля по меньшей мере одного условия, относящегося к рабочей машине, и
- управляющий блок, предназначенный для
сравнения, через интервалы расстояния, пройденного рабочей машиной, положения ковша и/или стрелы с положением, указанным в выбранном профиле управления;
проверки по меньшей мере одного условия, относящегося к рабочей машине, во время загрузки;
определения на основе указанного сравнения и проверенного условия, следует ли выбрать другой профиль управления для ковша и/или стрелы, и
выбора указанного другого профиля управления, если определено, что следует выбрать другой профиль управления для ковша и/или стрелы.
15. Рабочая машина по п. 14, в которой управляющий блок дополнительно выполнен с возможностью перемещения рабочей машины к груде материала и установления базисного местоположения в соответствии с этим положением рабочей машины.
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Устройство автоматического управления рабочим оборудованием погрузчика | 1988 |
|
SU1565981A1 |
| Способ управления процессом черпания фронтального погрузчика | 1985 |
|
SU1305273A1 |
| US 20120095640 A1, 19.04.2012 | |||
| US 20060245896 A1, 02.11.2006 | |||
| US 7734397 B2, 08.06.2010. | |||

