Изобретение относится к приводу хвостового винта вертолета с помощью динамоэлектрической машины.
Вертолет имеет обычно два винта, при этом главный винт приводится во вращение с помощью вертикально ориентированного вала, а хвостовой винт - с помощью ориентированного в осевом направлении вала. При этом под винтом понимаются как лопасти винта, так и головка винта, на которой закреплены эти лопасти. В вертолетах желательно иметь сравнительно большую удельную мощность, т.е. большое соотношение киловатт/килограмм, с целью увеличения грузоподъемности вертолета.
Вертолет является вертикально взлетающим и вертикально приземляющимся воздушным транспортным средством, в котором используется для создания подъемной силы и тяги с помощью двигателя один или несколько винтов, которые работают в виде вращающихся несущих поверхностей или крыльев или винтовых лопастей, за счет чего вертолет относится к летательным аппаратам с несущим винтом.
В наиболее часто применяемых одновинтовых системах на оси главного винта возникает крутящий момент, который вызывает противоположно направленное вращение фюзеляжа вертолета. Для предотвращения этого имеется, среди прочего, возможность предусмотрения боковой противотяги с помощью хвостового винта.
Конфигурация с хвостовым винтом является наиболее распространенной в конструкции вертолетов для компенсации создаваемого главным винтом крутящего момента. При этом с помощью установленного в хвостовой консоли вертолета за пределами круга главного винта хвостового винта создается горизонтальная тяга для противодействия вращению фюзеляжа вокруг вертикальной оси. Наряду с компенсацией крутящего момента, хвостовой винт служит также для управления вертолетом вокруг главной оси, т.е. поворотом вправо/влево. Тягой хвостового винта управляют, как правило, с помощью системы рычагов, которая изменяет общий угол установки лопастей винта. Хвостовой винт потребляет примерно 20% всей приводной мощности вертолета.
Недостатком применяемых до настоящего времени приводов хвостового винта является то, что сравнительно большая доля приводной мощности и общего веса вертолета приходится на хвостовой винт.
Для компенсации крутящего момента из WO 09/143669 А1 известен вертолет с двойными винтами, винты которого приводятся во вращение с помощью электродвигателей.
Из DE 3915526 А1 известен дуплексный электродвигатель, в котором полый ротор приводится во вращение снаружи и изнутри, и тем самым должна достигаться более высокая мощность по сравнению с обычными электродвигателями.
Из DE 19856647 А1 известен электродвигатель с большим крутящим моментом, который выполнен в виде многополюсной электрической машины с возбуждением от постоянных магнитов и имеет полый цилиндрический ротор из магнитомягкой стали, который на обеих сторонах обложен постоянными магнитами, расположен коаксиально между наружным и внутренним статором и соединен с возможностью вращения с установленным в корпусе машины валом.
Исходя из этого, в основу изобретения положена задача дальнейшего уменьшения удельного веса вертолета при одновременном обеспечении простоты конструкция хвостового винта.
Решение поставленной задачи достигается с помощью привода хвостового винта вертолета с помощью машины с поперечным магнитным потоком с возбуждением от постоянных магнитов с дуплексным расположением тем, что между двумя статорами, которые имеют каждый систему кольцевых обмоток, расположен дисковый ротор, который имеет постоянные магниты и на наружной окружности которого расположены лопасти хвостового винта.
Согласно изобретению, для привода хвостового винта предусмотрен электродвигатель с поперечным магнитным потоком с дуплексным расположением, который имеет кольцевые обмотки. Для повышения использования, согласно изобретению, электродвигателя с поперечным магнитным потоком этот электродвигатель расположен с дуплексным расположением, т.е. как на одной, так и на другой стороне дискового ротора предусмотрены статоры с кольцевыми обмотками. При этом два статора расположены так, что их канавки и зубцы находятся противоположно друг другу, а между ними расположен снабженный постоянными магнитами дисковый ротор.
Каждый статор имеет систему кольцевых обмоток, обмотки которой расположены концентрично вокруг оси хвостового винта. Кольцевые обмотки всего привода хвостового винта предпочтительно выполнены в виде двух систем кольцевых обмоток трехфазного тока, при этом каждый статор имеет систему кольцевых обмоток трехфазного тока. Для регулирования осевого положения ротора и тем самым всего хвостового винта используются обе системы кольцевых обмоток. При этом используется принципиальный способ симметричных компонентов для осуществления упрощенного анализа не симметрии в системе трехфазного тока или системе более высокого порядка.
При этом несимметричная система разделяется на систему прямой последовательности фаз, систему обратной последовательности фаз и систему нулевой последовательности.
При этом системы нулевой последовательности этих обеих систем кольцевых обмоток предпочтительно регулируется независимо друг от друга. Таким образом, необходимую осевую силу опоры можно создавать электрически.
Для создания осевой силы опоры и для управления ею возможно также предусмотрение не только системы нулевой последовательности, но также других комбинаций фазовых токов систем кольцевых обмоток. Система нулевой последовательности является комбинацией фазовых токов, которые не оказывают влияния на крутящий момент привода. Это особенно предпочтительно, поскольку за счет этого создание крутящего момента не зависит от создания осевой опорной силы.
Другая благоприятная комбинация фазовых токов достигается с помощью регулирования возбуждения, при котором с помощью преобразователя частоты достигается расширенный диапазон частоты вращения и более высокая точность позиционирования привода. При осевой магнитной опоре важным является лишь вектор переменного тока в направлении d на основании трансформации d/q. Известно, что в синхронном электродвигателе направление q трехфазного тока создает крутящий момент. Направление d не влияет на крутящий момент. Таким образом, можно, согласно изобретению, выполнять электродвигатель с поперечным магнитным потоком так, что направление d управляет силой притяжения между ротором и соответствующим статором однозначным и непрерывным образом. Для этого векторного регулирования важным является положение полюсного колеса, т.е. ротора. Это можно осуществлять без датчиков или с помощью кодера.
Таким образом, помимо системы нулевой последовательности систем трехфазных токов в принципе также пригодно направление d трехфазного тока для создания осевого магнитного подшипника.
Когда система нулевой последовательности трехфазного тока используется для создания и управления осевой опорной силой, то ротор привода также должен иметь ферромагнитные свойства, т.е. быть, в частности, магнитомягким. За счет этого устанавливается пригодная для использования плотность сил линий поля нулевой последовательности на диске ротора. Таким образом, постоянные магниты должны быть расположены на тонкой ферромагнитной пластине в виде уплотнительной шайбы. Для уменьшения потерь на вихревые токи в дисковом роторе шайба выполнена веерообразно или спицеобразно, или с концентричными прорезями.
Величина электродвигателя определяется крутящим моментом. Для получения большого крутящего момента предусмотрен многополюсный электродвигатель, в котором полюса ротора лежат на сравнительно большом диаметре.
Для дальнейшего повышения мощности привода кольцевые обмотки статора охлаждаются маслом. При этом особенно предпочтительно, когда система кольцевых обмоток одного статора окружена закрытой масляной ванной, в которой циркулирует масло, которое отводит тепловые потери обмотки и тем самым обеспечивает охлаждение соответствующей системы обмоток.
В другом варианте выполнения масляная ванна окружает не только систему кольцевых обмоток, а весь статор, так что могут отводиться также потери в железе статора.
Ротор выполнен в виде диска и снабжен на своих обращенных к статорам сторонах стойкими к высоким температурам постоянными магнитами.
Для дальнейшего уменьшения вихревых токов внутри постоянных магнитов, постоянные магниты выполнены слоистыми. При этом структура слоев выбрана так, что эффективно прерываются возможные пути прохождения вихревых токов внутри постоянных магнитов.
Через воздушный зазор между ротором и статорами ротор охлаждается проходящим воздухом.
Ротор, который выполнен в виде диска, имеет в качестве несущего материала по меньшей мере частично, наряду с материалами с ферромагнитными свойствами также высокопрочный карбон/кефлар с заделанными стойкими к высоким температурам постоянными магнитами. На наружной окружности дискового ротора предпочтительно расположены в радиальном удлинении диска лопасти хвостового винта.
Ниже приводится более подробное пояснение изобретения, а также предпочтительных вариантов выполнения изобретения со ссылками на прилагаемые чертежи, на которых изображено:
фиг.1 - вертолет;
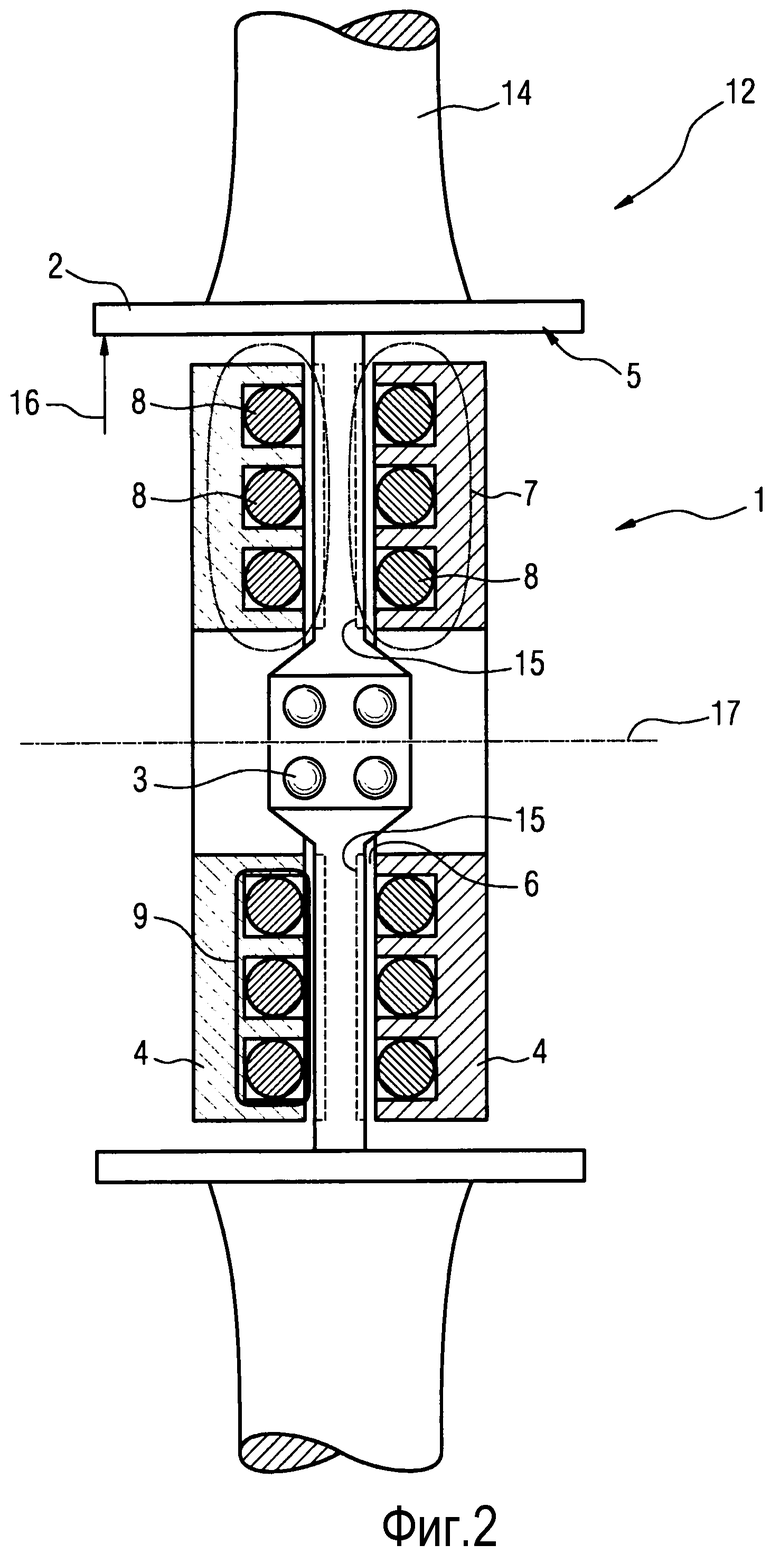
фиг.2 - привод хвостового винта вертолета.
На фиг.1 схематично показан вертолет 10 с главным винтом 11 и показанным в качестве примера хвостовым винтом 12, который расположен на хвостовой консоли 13. При этом расположенный в хвостовой консоли 13 вертолета 10 снаружи круга главного винта 11 хвостовой винт создает горизонтальную тягу с целью противодействия вращению фюзеляжа вокруг вертикальной оси. Наряду с компенсацией крутящего момента, хвостовой винт 12 служит также для управления вертолетом вокруг главной оси, т.е. поворотов вправо и влево.
На фиг.2 показан привод 1, согласно изобретению, хвостового винта 12 вертолета 10 в виде машины с поперечным потоком с возбуждением от постоянных магнитов с дуплексным расположением. При этом как слева, так и справа от ротора 5 находится статор 4 с кольцевыми обмотками 8, которые расположены концентрично вокруг оси 17. Ротор 5 установлен с возможностью вращения вокруг оси 17 с помощью радиального подшипника 3. На радиально наружном крае дискового ротора 5 предусмотрена несущая конструкция 2, на которой расположены лопасти 14 хвостового винта 12. При этом в этом варианте выполнения лопасти 14 расположены в радиальном удлинении дискового ротора 5.
В общую идею изобретения входят также другие варианты выполнения, в которых предусмотрено другое конструктивное расположение лопастей 14 винта, например, на наружной поверхности горшкообразной несущей конструкции 2.
По меньшей мере один радиальный подшипник 3 обеспечивает лишь радиальную опору и восприятие радиальных сил, в то время как осевая опора ротора 5 осуществляется с помощью обеих систем 8 кольцевых обмоток, предпочтительно систем кольцевых обмоток трехфазного тока в соответствующем статоре 4. То есть имеется осевая магнитная опора. Для этой регулируемой магнитной опоры в этом варианте выполнения применяется магнитное обратное замыкание электродвигателя с поперечным магнитным потоком. Обе системы нулевой последовательности систем кольцевых обмоток трехфазного тока регулируются независимо друг от друга, с целью удерживания соответственно, обеспечения опоры ротора 5 и тем самым в конечном итоге хвостового винта 12 в его заданном осевом положении.
Схематично изображенные линии 7 поля создаются с помощью соответствующей системы нулевой последовательности.
За счет изменения тока левой и правой системынулевой последовательности можно управлять величиной и знаком, т.е. влево или право, силой притяжения.
В хвостовом винте 12 возникают аэродинамические силы главным образом в осевом направлении, которые в данном случае воспринимаются с помощью осевой магнитной опоры.
Ротор 5 со своими расположенными на диске постоянными магнитами 15 движется в воздушном зазоре между обоими статорами 4 в воздухе и охлаждается воздухом. Потери на вихревые токи расположенных на роторе 5 постоянных магнитов 15 отводятся в одном варианте выполнения с помощью посторонней вентиляции.
В другом особенно предпочтительном варианте выполнения аэродинамика хвостового винта 12 выполнена так, что воздушное охлаждение воздушного зазора 6 обеспечивается на основании эффекта Вентури. Таким образом, нет необходимости в дополнительной посторонней вентиляции, которая, с одной стороны, требует дополнительного контролирования ее действия и, с другой стороны, приводит к увеличению веса вертолета 10.
Однако для уменьшения потерь на вихревые токи постоянные магниты 15 выполнены слоистыми.
Предпочтительно, привод 1 и хвостовой винт 12 имеют общую радиальную и осевую опору, и нет необходимости в редукторе и/или дополнительных опорных блоках в зоне хвостового винта.
Для дальнейшего снижения веса вертолета статоры 4 предпочтительно снабжены многослойными металлическими материалами.
Для дальнейшего повышения использования привода 1 хвостового винта 12 кольцевые обмотки 8 имеют масляное охлаждение. При этом масляная ванна 9 окружает концентрично проходящую кольцевую обмотку, т.е. одну фазу статора 4 или всю систему кольцевых обмоток соответствующего статора 4. Это схематично показано на фиг.2 в нижней половине на левом статоре 4. Таким образом отводятся потери тепла системы обмоток.
Также весь статор 4 со своим ярмом, в частности магнитопроводом и системой обмоток, может находиться в масляной ванне.
Таким образом, указанная система привода 1 хвостового винта 12 выполнена в виде электродвигателя с поперечным магнитным потоком с дуплексным расположением для вертолета с мощностью 234 кВт при частоте вращения примерно 3600 об/мин, при наружном диаметре 16 привода 1 хвостового винта 12 примерно 3500 мм, что соответствует внутреннему диаметру хвостового винта 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОДНОЕ УСТРОЙСТВО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2011 |
|
RU2547938C2 |
| ВИНТ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, СПОСОБНОГО К ЗАВИСАНИЮ, И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2017 |
|
RU2733456C1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| ВИНТОРУЛЕВАЯ КОЛОНКА С ЭЛЕКТРОДВИЖИТЕЛЕМ | 2024 |
|
RU2834489C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПИЩЕВЫХ ПРОДУКТОВ С МАГНИТНЫМ ПРИВОДОМ | 2003 |
|
RU2340274C2 |
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2001 |
|
RU2231200C2 |
| ОСЕВОЙ ГЕРМЕТИЧНЫЙ ТОПЛИВОПЕРЕКАЧИВАЮЩИЙ АГРЕГАТ | 2022 |
|
RU2791799C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИЖИТЕЛЬ В ЖИДКИХ СРЕДАХ С ЭЛЕКТРИЧЕСКОЙ РЕДУКЦИЕЙ | 2009 |
|
RU2421373C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ КНБК В ВИДЕ ТРУБЫ В ТРУБЕ | 2012 |
|
RU2616956C2 |
| Устройство управления курсовым положением вертолета с соосными винтами | 2021 |
|
RU2759228C1 |
Изобретение относится к области авиации, в частности к конструкции хвостовых винтов вертолетов. Хвостовой винт (12) вертолета (10) имеет привод (1), содержащий электрическую машину с поперечным магнитным потоком с возбуждением от постоянных магнитов с дуплексным расположением статоров. Между двумя статорами (4), каждый из которых имеет систему (8) кольцевых обмоток, расположен дисковый ротор (5), который имеет постоянные магниты (15) и на наружной окружности которого расположены лопасти (14) хвостового винта (12). Каждая система (8) кольцевых обмоток расположена концентрично вокруг оси (17) хвостового винта (12), так что кольцевые обмотки системы (8) кольцевых обмоток расположены относительно оси радиально друг над другом. Ротор через радиальный подшипник опирается на ось (17). Постоянные магниты (15) являются слоистыми. Системы (8) кольцевых обмоток охлаждаются маслом, при этом система (8) кольцевых обмоток каждого статора (4) находится в масляной ванне. Достигается уменьшение удельного веса вертолета при одновременном упрощении конструкции хвостового винта. 11 з.п. ф-лы, 2 ил.
1. Хвостовой винт (12) вертолета (10), привод (1) которого осуществляется с помощью машины с поперечным магнитным потоком с возбуждением от постоянных магнитов с дуплексным расположением, отличающийся тем, что между двумя статорами (4), которые имеют каждый систему (8) кольцевых обмоток, расположен дисковый ротор (5), который имеет постоянные магниты (15) и на наружной окружности которого расположены лопасти (14) хвостового винта (12), при этом каждая система (8) кольцевых обмоток расположена концентрично вокруг оси (17) хвостового винта (12), так что кольцевые обмотки системы (8) кольцевых обмоток расположены относительно оси радиально друг над другом, при этом ротор через радиальный подшипник опирается на ось (17).
2. Хвостовой винт (12) по п.1, отличающийся тем, что постоянные магниты (15) являются слоистыми.
3. Хвостовой винт (12) по любому из п.1 или 2, отличающийся тем, что, по меньшей мере, системы (8) кольцевых обмоток охлаждаются маслом.
4. Хвостовой винт (12) по п.3, отличающийся тем, что система (8) кольцевых обмоток каждого статора (4) находится в масляной ванне.
5. Хвостовой винт (12) по п.1, отличающийся тем, что концепция опоры предусматривает общую радиальную опору и общую осевую опору привода (1) хвостового винта (12).
6. Хвостовой винт (12) по п.2, отличающийся тем, что концепция опоры предусматривает общую радиальную опору и общую осевую опору привода (1) хвостового винта (12).
7. Хвостовой винт (12) по п.3, отличающийся тем, что концепция опоры предусматривает общую радиальную опору и общую осевую опору привода (1) хвостового винта (12).
8. Хвостовой винт (12) по п.4, отличающийся тем, что концепция опоры предусматривает общую радиальную опору и общую осевую опору привода (1) хвостового винта (12).
9. Хвостовой винт (12) по п.5, отличающийся тем, что осевая опора хвостового винта является регулируемой магнитной осевой опорой, которая реализована, в частности, с помощью системы нулевой последовательности системы трехфазного тока соответствующих систем (8) кольцевых обмоток статоров (4).
10. Хвостовой винт (12) по п.6, отличающийся тем, что осевая опора хвостового винта является регулируемой магнитной осевой опорой, которая реализована, в частности, с помощью системы нулевой последовательности системы трехфазного тока соответствующих систем (8) кольцевых обмоток статоров (4).
11. Хвостовой винт (12) по п.7, отличающийся тем, что осевая опора хвостового винта является регулируемой магнитной осевой опорой, которая реализована, в частности, с помощью системы нулевой последовательности системы трехфазного тока соответствующих систем (8) кольцевых обмоток статоров (4).
12. Хвостовой винт (12) по п.8, отличающийся тем, что осевая опора хвостового винта является регулируемой магнитной осевой опорой, которая реализована, в частности, с помощью системы нулевой последовательности системы трехфазного тока соответствующих систем (8) кольцевых обмоток статоров (4).
| US 20060060693 A1, 23.03.2006 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОПРИВОДОМ | 2003 |
|
RU2266236C2 |
| DE 10242833 A1, 08.04.2004 | |||
| WO 2008032430 A1, 20.03.2008 | |||

