Изобретение относится к области прецизионного приборостроения и может быть использовано при разработке и производстве двухстепенных поплавковых гироскопов.
Известен способ определения погрешности двухстепенного поплавкового гироскопа [У.Ригли, У.Холлистер, У.Денхард. Теория, проектирование и испытания гироскопов // М.: Мир, 1972 г., С.358-367], заключающийся в выполнении следующих технологических операций:
1. Установка гироскопа на платформе одноосного гиростабилизатора.
2. Включение гироскопа в качестве чувствительного элемента гиростабилизатора.
3. Включение системы регулирования температуры гироскопа.
4. Нагрев гироскопа до заданного значения температуры.
5. Определение скорости ухода гироскопа путем измерения времени разворота платформы гиростабилизатора на заданный эталонный угол.
6. Определение погрешности гироскопа
δω=(Ωизм-Ωэ),
где:
Ωизм - измеренная скорость ухода,
Ωэ - значение эталонной скорости вращения основания, например Ωэ=ΩЗв,
ΩЗв- вертикальная составляющая скорости вращения Земли.
Недостатком способа является сложность используемого оборудования - одноосного гиростабилизатора.
Известен также способ определения погрешности двухстепенного поплавкового гироскопа [У.Ригли, У.Холлистер, У.Денхард, Теория, проектирование и испытания гироскопов» // М: Мир, 1972 г., С.367-371], который принимаем за прототип. Способ-прототип заключается в выполнении следующих технологических операций:
1. Установка гироскопа в заданное положение, например, при котором его продольная ось и ось вращения ротора гиромотора горизонтальны.
2. Включение гироскопа в режим обратной связи датчик угла - усилитель-преобразователь - датчик момента. При этом ток 1дм, протекающий в обмотке датчика момента после приведения камеры в «нулевое» положение, будет являться мерой момента, прикладываемого к гирокамере.
3. Включение системы регулирования температуры гироскопа. Настройки ее на температуру, определенную расчетным путем.
4. Нагрев гироскопа.
5. Измерение тока в цепи датчика момента обратной связи.
6. Определение погрешности δω гироскопа из соотношения:
δω=(Ωизм-Ωэ),
где:
Ωизм=Кдм*Iдм измеренная скорость ухода гироскопа,
Кдм - коэффициент передачи гироскопа по току датчика момента,
Iдм - измеренное значение тока в цепи датчика момента.
В данном случае Ωэ=ΩЗв.
Недостатком способа является малая точность. Указанный недостаток обусловлен тем, что в реальных гироскопах значение рабочей температуры отличается от ее расчетного значения. Отклонение обусловлено наличием технологических погрешностей:
- погрешности балансировки камеры в ванне по плавучести,
- отклонениями параметров (плотности) поддерживающей жидкости, заполняющей рабочий зазор гироскопа, от ее расчетного значения,
- погрешностями работы системы регулирования температуры прибора. Отклонение температуры прибора от ее расчетного значения приводит к тому, что появляется остаточный вес (плавучесть) поплавковой камеры. Под действием остаточного веса (плавучести) камера тонет (всплывает) в жидкости. Движение камеры в рабочем зазоре ограничивается камневыми опорами. При механическом контакте на опоры действует сила давления, пропорциональная остаточному весу (плавучести) гирокамеры. При развороте камеры вокруг оси подвеса наличие давления в опорах приводит к появлению момента трения. Появление момента трения приводит к снижению точности определения погрешности гироскопа.
Задачей настоящего изобретения является совершенствование технологического процесса производства гироскопов.
Достигаемый технический результат - повышение точности определения погрешности двухстепенного поплавкового гироскопа.
Поставленная задача решается тем, что в известном способе определения погрешности двухстепенного поплавкового гироскопа, содержащем установку гироскопа на неподвижном основании, включение в режим обратной связи датчик угла - усилитель - преобразователь - датчик момента, запуск гиромотора, нагрев гироскопа, измерение тока в цепи датчика момента обратной связи, определение погрешности гироскопа, нагрев гироскопа осуществляют до температуры, определяемой по минимальному значению разности токов, измеряемых в цепи датчика момента обратной связи в двух положениях статического равновесия гирокамеры, которые она, соответственно, занимает после отклонения вокруг оси подвеса в одну и другую стороны на углы 2-10 угл. мин, при фиксированных значениях температуры гироскопа, изменяемой в диапазоне Ti=(Tpac+idT)°C, где Трас - расчетное значение температуры, dT=1°С - дискретность изменения температуры, -3≤i≤3.
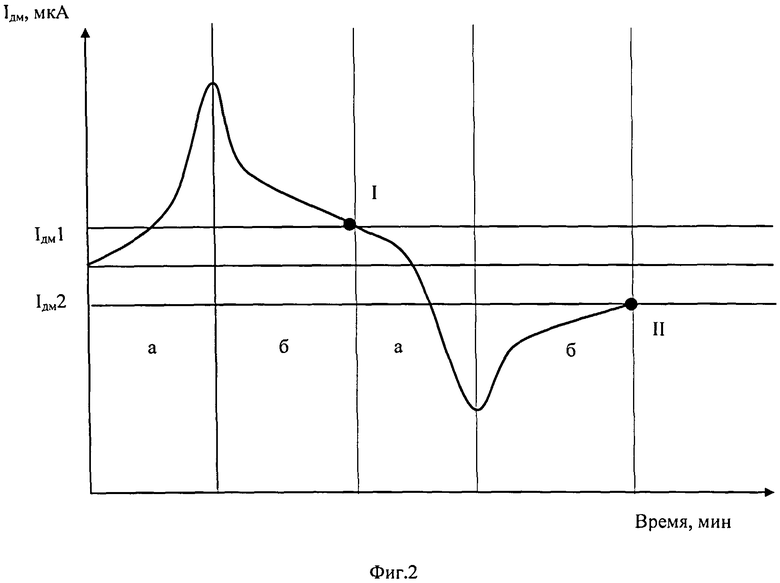
Предлагаемое изобретение поясняется фиг.1-3. На фиг.1 приведена принципиальная схема включения гироскопа при определении погрешности.
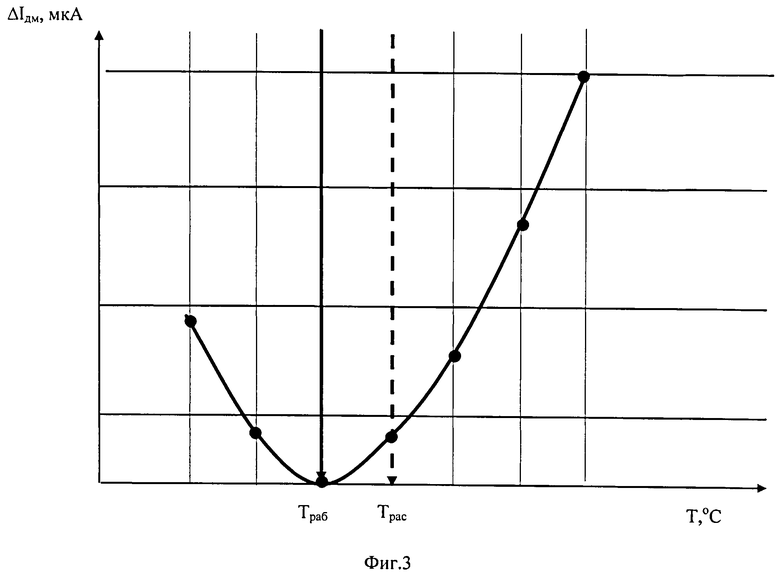
На фиг.2 приведен график изменения тока в цепи датчика момента во времени при и после отклонения камеры от «нулевого» положения.
На фиг.3 приведен график зависимости разности токов, измеренных в цепи датчика момента в двух положениях статического равновесия, от температуры прибора. На фигурах приняты следующие обозначения: На фиг.1:
1 - гироскоп.
2 - неподвижное основание.
3 - гиромотор.
4 - гирокамера.
5 - камневые опоры.
6 - поддерживающая жидкость.
7 - датчик угла.
8 - усилитель-преобразователь.
9 - датчик момента обратной связи.
10 - источник питания.
11-тумблер.
12 - милливольтметр.
ОХ - ось подвеса поплавковой гирокамеры 4.
OZ - ось вращения ротора гиромотора 3.
ОУ - измерительная ось гироскопа 1.
На фиг.2:
Iдм - ось тока в цепи датчика момента обратной связи.
а - участок, характеризующий изменение тока в цепи датчика 9 момента при отклонении камеры 4.
б - участок, характеризующий процесс изменения тока в цепи датчика 9 момента при возвращении камеры 4 из отклоненного положения в положение статического равновесия.
I, II - положения статического равновесия моментов.
На фиг.3:
ΔIдм - ось разности тока в цепи датчика 9 момента.
Т - ось температуры гироскопа 1.
Трас - расчетное значение температуры гироскопа 1.
Траб - рабочее значение температуры гироскопа 1.
Реализация предлагаемого способа осуществляется при выполнении следующей последовательности технологических операций:
1. Установка гироскопа 1 на неподвижном основании 2 в положение, при котором его продольная ось ОХ и ось OZ вращения ротора гиромотора 3 горизонтальны. Выбор данного положения обусловлен тем, что в этой ориентации, при наличии остаточного веса (плавучести) гирокамеры 4, давление возникает в двух камневых опорах 5 (при вертикальной ориентации продольной оси гироскопа - в одной). Достоверность измерения момента трения из-за его увеличения повышается.
2. Нагрев гироскопа 1 до нижней границе обозначенного диапазона -3≤i≤3 до температуры Т1=(Трас -3)°С, где Трас - расчетное значение температуры гироскопа 1 (температуре, при которой удельный вес камеры 4 равен удельному весу поддерживающей жидкости 6). При данной температуре удельный вес камеры 4 меньше удельного веса жидкости 6, камера 4 будет иметь остаточную плавучесть. Ее перемещение вверх по рабочему зазору ограничивается камневыми опорами 5. При появлении механического контакта в опорах 5 действует сила давления, пропорциональная остаточной плавучести. Выбор данной начальной температуры обусловлен тем, что время реализации способа при нагреве гироскопа значительно меньше времени реализации способа при его охлаждении при одинаковых условиях окружающей среды.
3. Включение гироскопа 1 в режим обратной связи датчик 7 угла - усилитель-преобразователь 8 - датчик 9 момента. При включении обратной связи сигнал рассогласования датчика 7 угла преобразуется в ток в обмотке датчика 9 момента. Значение тока после устранения рассогласования датчика 7 угла будет пропорционально моменту, прикладываемому к камере 4.
4. Отклонение поплавковой камеры 4, например, по часовой стрелке на 2-10 угл. мин путем кратковременного подключения источника 10 тумблером 11 ко второй обмотке датчика 9 момента. Контроль отклонения путем измерения выходного сигнала датчика 7 угла осуществляют с помощью милливольтметра 12. После отключения источника 10 от второй обмотки датчика 9 поплавковая камера 4 под действием момента со стороны датчика 9 момента обратной связи начнет движение в обратную сторону к «нулевому» положению. Ее движение прекратится в положении статического равновесия моментов:
Мр+Мг+Мтр=М1дм=Кдм*Iдм1,
где:
Ml дм - момент со стороны датчика 9 момента обратной связи.
Мр - момент разбалансировки камеры 4.
Мг - гироскопический момент.
Мтр - момент трения в камневых опорах 5.
Кдм - коэффициент передачи датчика 9 момента.
Iдм1 - ток в цепи датчика момента, измеренный в положении первого статического положения камеры 4.
5. Отклонение поплавковой камеры 4 против часовой стрелки на 2-10 угл. мин путем кратковременного подключения источника 10 (с противоположной полярностью) ко второй обмотке датчика 9 момента. Контроль отклонения путем измерения выходного сигнала датчика 7 угла осуществляют с помощью милливольтметра 12. После отключения источника 10 от второй обмотки датчика 9, поплавковая камера 4 под действием момента со стороны датчика 9 момента обратной связи начнет движение в обратную сторону к «нулевому» положению с другой стороны. Ее движение прекратится в положении второго статического равновесия моментов.
Мр+Мг-Мтр=М2дм=Кдм*Iдм2,
где:
М2дм - момент со стороны датчика 9 момента обратной связи.
Мр - момент разбалансировки камеры 4.
Мг - гироскопический момент.
Мтр - момент трения в камневой опоре 5.
Кдм - коэффициент передачи датчика 9 момента,
Iдм2 - ток в цепи датчика 9 момента, измеренный в положении второго статического положения гирокамеры 4.
Процесс изменения тока в цепи датчика момента обратной связи показан на фиг.2.
6. Определение разности тока ΔIдм1, пропорциональной моменту трения:
ΔIдм1=(Iдм2 - Iдм1)=2ΔМтр1/Кдм,
7. Повторение операций по пунктам 4-6, при последовательной установке температуры гироскопа 1 равной Ti=(Tpac+idT)°C, где Трас - расчетное значение температуры, dT=1°С - дискретность изменения температуры, -2≤i≤3, и построении по полученным результатам графика ΔIдмi=F(Ti). Пример графика зависимости приведен на фиг.3.
8. Определение из графика (фиг.3) температуры гироскопа 1, при которой значение ΔI минимально, соответствующее температуре соответствующей «нулевой» плавучести поплавковой камеры и нагрев гироскопа 1 до температуры Траб, определенной операцией по пункту 8. При этой температуре давление в камневых опорах 5 и, соответственно, момент трения в идеальном случае будут отсутствовать. Измерение тока в цепи датчика 9 момента.
9. Определение погрешности гироскопа 1 из соотношения:
δω=(Ωизм-Ωэ),
где:
Ωизм=Кдм*Iдм - измеренная скорость ухода гироскопа,
Кдм - коэффициент передачи гироскопа по току датчика момента,
Iдм - измеренное значение тока в цепи датчика момента.
В данном случае Δэ=ΔЗв.
При этом за счет исключения (уменьшения) из результатов измерения составляющей погрешности от момента трения в камневых опорах, точность определения погрешности гироскопа 1 повышается.
Выбор диапазона отклонения камеры 4 обусловлен тем, что, как показывают проведенные на партии гироскопов экспериментальные исследования:
- при отклонении камеры в одну или другую стороны в пределах 2÷10 угл. мин камера выходит за пределы зоны, в которой момент трения в камневых опорах не является превалирующим, при всех задаваемых значениях температуры Ti, что позволяет камере после отклонения возвращаться под действием момента со стороны датчика момента обратной связи к положению статического равновесия. Способ реализуется.
- при отклонении менее 2 угл. мин имеется вероятность, что поплавковая камера после отклонения останется в зоне, где превалирует момент трения. Движение камеры в этом случае не происходит. Способ не реализуется. Так как определить границу статического равновесия моментов в этом случае не удается.
- при отклонении камеры более чем на 10 угл. мин. увеличивается время возвращения камеры к положению статического равновесия, время реализации предлагаемого способа. Так как задачей настоящего изобретения является совершенствование технологического процесса производства гироскопов, критерием которого является также малое (относительно) время выполнения технологических процессов, то увеличение времени является отрицательным.
Выбор диапазона изменения температуры прибора от (Трас=-3)°С до (Трас=+3)°С определяется максимально возможным уровнем технологических погрешностей предварительной балансировки поплавковой камеры в ванне по плавучести. Увеличение диапазона ведет к повышению трудоемкости процесса, уменьшение может привести к тому, что определяемая температура может оказаться за его пределами.
При реализации предлагаемого способа, точность определения погрешности двухстепенного поплавкового гироскопа, по сравнению со способом, принятым за прототип, повышается. Повышение точности достигается за счет исключения из результатов измерений составляющей погрешности от момента трения в камневых опорах. Исключение происходит путем определения и нагрева гироскопа до температуры, при которой давление в камневых опорах отсутствует (минимально), отсутствует остаточный вес (плавучесть) поплавковой камеры. Таким образом, поставленная задача решена.
На предприятии предлагаемый способ проверен. Получены положительные результаты. В настоящее время разрабатывается техническая документация для использования предлагаемого технического решения при производстве поплавковых двухстепенных гироскопов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БАЛАНСИРОВКИ ГИРОКАМЕРЫ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2016 |
|
RU2648023C1 |
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2015 |
|
RU2594628C1 |
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2017 |
|
RU2641018C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА С ГАЗОДИНАМИЧЕСКИМ ПОДВЕСОМ РОТОРА ГИРОМОТОРА | 2014 |
|
RU2570223C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕБАЛАНСА ГИРОУЗЛА ВИБРАЦИОННЫМ МЕТОДОМ | 2023 |
|
RU2815479C1 |
| Способ определения погрешности двухстепенного гироблока | 2016 |
|
RU2637186C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДИФФЕРЕНТА ПОПЛАВКОВОЙ ГИРОКАМЕРЫ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2015 |
|
RU2591287C1 |
| Двухстепенной поплавковый гироскоп | 2018 |
|
RU2682131C1 |
| Способ определения погрешности двухстепенного гироблока | 2018 |
|
RU2688915C1 |
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2002 |
|
RU2229100C1 |
Изобретение относится к области прецизионного приборостроения и может быть использовано при разработке и производстве двухстепенных поплавковых гироскопов. Заявлен способ определения погрешности двухстепенного поплавкового гироскопа, включающий установку гироскопа на неподвижном основании, включение в режим обратной связи датчик угла - усилитель - преобразователь - датчик момента, запуск гиромотора, нагрев гироскопа, измерение тока в цепи датчика момента обратной связи, определение погрешности гироскопа. Нагрев гироскопа осуществляют до температуры, определяемой по минимальному значению разности токов, измеряемых в цепи датчика момента обратной связи в двух положениях статического равновесия гирокамеры, которые она соответственно занимает после отклонения вокруг оси подвеса в одну и другую стороны на углы 2÷10 угл. мин, при фиксированных значениях температуры гироскопа, изменяемой в диапазоне Ti=(Tрac+idT)°C, где Трас - расчетное значение температуры, dT=1°С - дискретность изменения температуры, -3≤i≤3. Технический результат - повышение точности определения погрешности двухстепенного поплавкового гироскопа. 3 ил.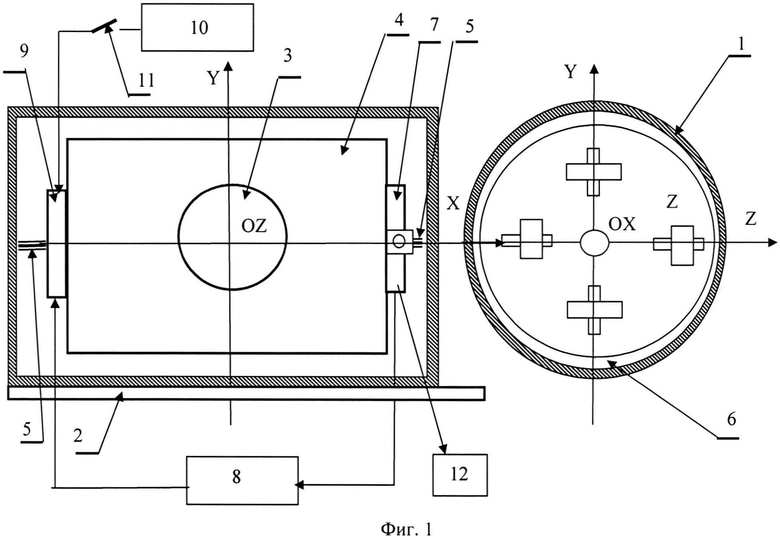
Способ определения погрешности двухстепенного поплавкового гироскопа, содержащий установку гироскопа на неподвижном основании, включение в режим обратной связи датчик угла - усилитель - преобразователь - датчик момента, запуск гиромотора, нагрев гироскопа, измерение тока в цепи датчика момента обратной связи, определение погрешности гироскопа, отличающийся тем, что нагрев гироскопа осуществляют до температуры, определяемой по минимальному значению разности токов, измеряемых в цепи датчика момента обратной связи в двух положениях статического равновесия гирокамеры, которые она занимает после отклонения вокруг оси подвеса в одну и другую стороны на углы 2÷10 угл. мин, при фиксированных значениях температуры гироскопа, изменяемой в диапазоне Ti=(Tp+idT)°C, где Тр - расчетное значение температуры, dT=1°С - дискретность изменения температуры, -3≤i≤3.
| СПОСОБ ПОДГОТОВКИ К РАБОТЕ ГИРОСИСТЕМЫ С ДВУХСТЕПЕННЫМ ПОПЛАВКОВЫМ ГИРОСКОПОМ | 2002 |
|
RU2232378C1 |
| СПОСОБ ТЕРМОСТАБИЛИЗАЦИИ ГИРОПЛАТФОРМЫ В ПРОТОЧНОМ ТЕРМОСТАТЕ | 2008 |
|
RU2381454C1 |
| СПОСОБ ТЕРМОСТАТИРОВАНИЯ ГИРОСКОПА В ПРОТОЧНОМ ТЕРМОСТАТЕ | 2004 |
|
RU2282146C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2239159C1 |
| Термостатируемый поплавковый гироскоп | 1986 |
|
SU1450540A1 |
| US 4020701 A , 05.07.1977 | |||

