Изобретение относится к области прецизионного приборостроения и может быть использовано в гироскопических системах, построенных на двухстепенных поплавковых гироскопах.
Известен способ приведения гироскопической системы с поплавковым гироскопом в рабочее состояние [В.П. Доронин и другие. Гироскопические интеграторы инерциальных систем в книге Развитие механики гироскопических систем, М.: Наука, 1973 г., стр. 154; Е.А. Никитин, А.А. Балашова. Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров, М.: Машиностроение, 1960, стр. 115-118], заключающийся в выполнении следующих технологических операций:
1) Установке гироскопа на платформу системы.
2) Подключении к выходу усилителя термостабилизации обмотки разогрева.
3) Включении системы термостабилизации на форсированный обогрев.
4) Запуске гиромотора.
5) Включении системы стабилизации углового положения платформы. При этом сигнал с датчика угла гироскопа через усилитель-преобразователь поступает на двигатель стабилизации, установленный на оси платформы.
6) Нагреве прибора до рабочей температуры.
7) Переключении режима работы системы терморегулирования. Переключении выхода усилителя термостабилизации после уменьшения тока в цепи обмотки форсированного обогрева прибора до заданного значения на обмотку рабочего обогрева прибора.
Недостатками способа являются:
1) Перегрев корпуса в первоначальный момент. Большие температурные градиенты при форсированном разогреве ведут к снижению надежности прибора, появляется возможность разгерметизации, возникновения поводок корпуса и т.д.
2) Сложность конструкции из-за наличия двух обмоток обогрева.
Известен также способ приведения в рабочее состояние гироскопической системы с двухстепенным поплавковым гироскопом [Прибор Е 32-148. Инструкция по контролю КФ 2.562.148-01 И2, стр. 15. Разработки предприятия ФГПУ ЦНИИ "Электроприбор", 2002 г.], который принимаем за прототип. Способ заключается в выполнении следующих технологических операций:
1) Установке гироскопа на платформе гиросистемы (гиростабилизатора) в заданное положение.
2) Подключении датчика угла через усилитель-преобразователь к датчику момента. При этом поплавковая камера, находившаяся в произвольном угловом положении относительно корпуса, под действием момента со стороны датчика момента будет стремиться к нулевому положению (соответствующему минимальному сигналу датчика угла).
3) Включении системы термостабилизации прибора.
4) Запуске гиромотора.
5) Включении системы стабилизации углового положения платформы. При этом цепь обратной связи по току в цепи датчика момента размыкают. Сигнал с датчика угла гироскопа через второй усилитель-преобразователь поступает на двигатель стабилизации, установленный на оси платформы.
6) Нагреве гироскопа до рабочей температуры.
7) Одновременном измерении сигнала датчика угла платформы.
Система считается приведенной в рабочее состояние после затухания переходного процесса в системе стабилизации углового положения платформы (после того, как изменения сигнала датчика угла платформы станут меньше допускаемого значения).
Недостатком способа является большое время приведения гиросистемы в рабочее состояние (большое время готовности). Время готовности системы определяется временем готовности поплавкового гироскопа и временем, необходимым для затухания переходного процесса в системе стабилизации углового положения платформы. Время готовности поплавкового гироскопа определяется с момента включения системы термостабилизации до момента, когда стабилизируются возмущающие моменты, обусловленные тепловыми градиентами в приборе. Время выравнивания тепловых градиентов (время прогрева прибора до рабочей температуры) определяется в основном механизмом передачи тепла от обмотки обогрева, расположенной на внешней цилиндрической части корпуса прибора, через жидкость (элемент, имеющий наибольшее термическое сопротивление) к поплавковому гироузлу (к внутренним элементам прибора). При этом передача тепла производится с помощью механизма теплопроводности и механизма свободной конвекции, на что требуется значительное время. Это время является определяющим при приведении гиросистемы в рабочее состояние.
Задачей настоящего изобретения является уменьшение времени готовности гиросистемы с поплавковым двухстепенным гироскопом.
Поставленная задача решается тем, что в известном способе подготовки к работе гиросистемы с поплавковым двухстепенным гироскопическим прибором, нагрев поплавкового двухстепенного гироскопического прибора до рабочей температуры осуществляют при колебаниях его поплавковой камеры относительно оси ее подвеса, а приведение платформы к заданному пространственному положению осуществляют после окончания нагрева.
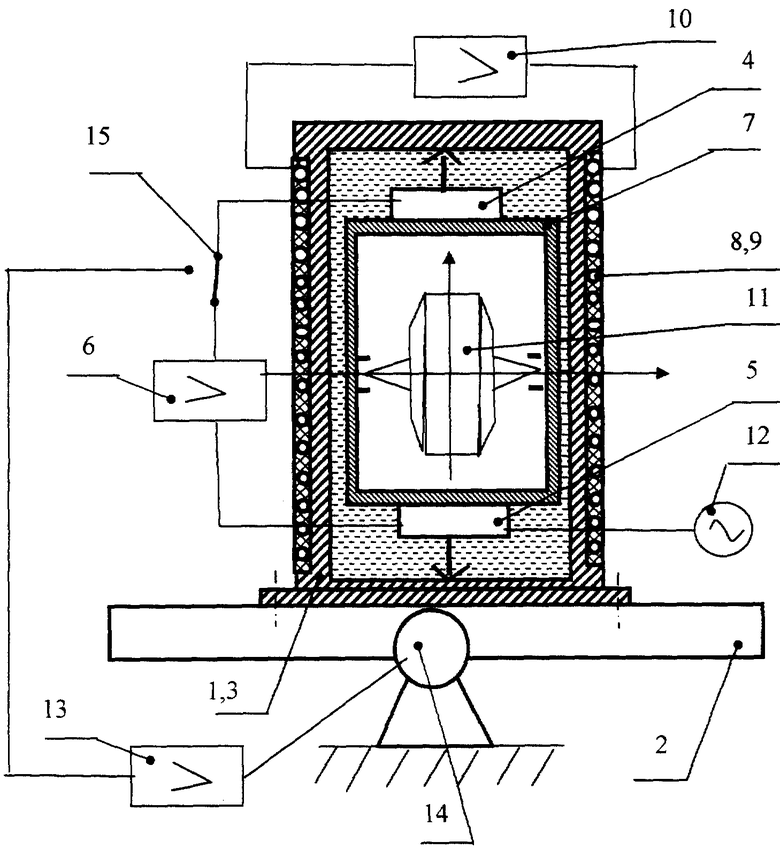
Предлагаемое изобретение поясняется чертежом, на котором приведена принципиальная схема включения прибора. На чертеже приняты следующие обозначения: 1 - поплавковый гироскоп, 2 - платформа гиросистемы, 3 - крепежные элементы, 4 - датчик угла, 5 - датчик момента, 6 - усилитель-преобразователь обратной связи, 7 - поплавковая камера, 8 - термодатчик, 9 - обмотка обогревателя, 10 - усилитель термостабилизации, 11 - гиромотор, 12 - низкочастотный источник переменного напряжения, 13 - усилитель-преобразователь цепи стабилизации углового положения платформы, 14 - двигатель стабилизации.
Реализация предлагаемого способа осуществляется при выполнении следующей последовательности технологических операций:
1) Установки гироскопа 1 на платформу 2 системы с помощью крепежных элементов 3 в заданное положение.
2) Подключении датчика 4 угла через усилитель-преобразователь 6 к одной из обмоток управления двухобмоточного датчика 5 момента в цепь обратной связи по току датчика 5 момента. При этом поплавковая камера 7, занимавшая произвольное положение, под действием момента со стороны датчика 5 момента будет стремиться к нулевому положению (соответствующему минимальному сигналу датчика 4 угла).
3) Включении системы термостабилизации прибора 1, состоящей из термодатчика 8, нагревателя 9, усилителя 10 термостабилизации. При этом прибор 1 начнет нагреваться. Тепло от обмотки обогрева через корпус, через поддерживающую жидкость будет передаваться к поплавковому гироузлу 7. Передача будет осуществляться при неподвижной поплавковой камере 7 механизмами теплопроводности и свободной конвекции.
4) Запуске гиромотора 11.
5) Подключении второй обмотки датчика 5 момента к выходу низкочастотного источника переменного напряжения (f=0,2-0,02 Гц). Поплавковая камера 7 под действием периодически изменяющегося момента, прикладываемого со стороны датчика 5 момента, начинает совершать периодические движения (колебания) вокруг оси подвеса. В результате слои жидкости в рабочем зазоре при движении камеры 7 будут перемешиваться выступающими частями конструкции и за счет сил вязкого трения жидкости. При движении слоев жидкости в действие вступает третий механизм теплопередачи (помимо ранее действовавших механизмов теплопроводности и свободной конвекции) - механизм принудительной конвекции, отсутствующий в способе-прототипе.
6) Одновременном измерении температуры прибора 1.
7) Отключении источника 12 от второй обмотки датчика 5 момента после достижения температурой прибора заданного (рабочего) значения. При этом камера 7 под действием момента со стороны датчика 5 момента (первая обмотка), включенного в цепь обратной связи, займет положение, соответствующее минимуму сигнала с датчика 4 угла.
8) Включении системы стабилизации углового положения платформы 2. При этом цепь обратной связи по току в цепи первой обмотки управления датчика 5 момента размыкают. Сигнал с датчика 4 угла гироскопа 1 через второй усилитель-преобразователь 13 поступает на двигатель 14 стабилизации, установленный на оси платформы 2.
9) Измерении сигнала датчика угла платформы 2. После того, как изменения сигнала датчика угла платформы станут меньше допускаемого значения, система считается приведенной в рабочее состояние.
При реализации предлагаемого способа время готовности системы по сравнению со способом, принятым за прототип, сокращается. Сокращение времени готовности достигается за счет сокращения времени готовности ее поплавкового чувствительного элемента, которое в свою очередь уменьшается за счет сокращения времени передачи тепловой энергии через жидкость (через элемент конструкции, обладающий наименьшей теплопроводностью) от обмотки обогрева к внутренним элементам прибора при введении в действие третьего (дополнительного) механизма переноса тепловой энергии - принудительной конвекции, который отсутствует в прототипе.
На предприятии предлагаемый способ проверен. Установлено, что при качаниях поплавковой камеры испытуемого гироскопа с частотой 0,05 Гц время готовности гиросистемы уменьшается на 30-40%. В настоящее время разрабатывается техническая документация для использования предлагаемого технического решения при производстве поплавковых двухстепенных гироскопов.
Технико-экономическая эффективность изобретения заключается в уменьшении времени готовности гиросистемы с двухстепенным поплавковым гироскопом.
В связи с отсутствием сведений о потребностях страны в таких системах экономический эффект изобретения подсчитать не представляется возможным.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2017 |
|
RU2641018C1 |
| СПОСОБ БАЛАНСИРОВКИ ГИРОКАМЕРЫ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2016 |
|
RU2648023C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2013 |
|
RU2526513C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2015 |
|
RU2594628C1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1972 |
|
SU355494A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА С ГАЗОДИНАМИЧЕСКИМ ПОДВЕСОМ РОТОРА ГИРОМОТОРА | 2014 |
|
RU2570223C1 |
| Способ определения погрешности двухстепенного гироблока | 2018 |
|
RU2688915C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Способ определения погрешности двухстепенного гироблока | 2016 |
|
RU2637186C1 |
Изобретение относится к области прецизионного приборостроения и может быть использовано в гироскопических системах, построенных на двухстепенных поплавковых гироскопах. Способ подготовки к работе гиросистемы с поплавковым двухстепенным гироскопическим прибором заключается в нагреве поплавкового двухстепенного гироскопического прибора до рабочей температуры, осуществляемом при колебаниях его поплавковой камеры относительно оси ее подвеса, и приведении платформы к заданному пространственному положению после окончания нагрева. Техническим результатом является уменьшение времени готовности гиросистемы с поплавковым двухстепенным гироскопом. 1 ил.
Способ подготовки к работе гиросистемы с двухстепенным поплавковым гироскопом, заключающийся в размещении гироскопа на платформе, нагреве его до рабочей температуры, приведении платформы к заданному положению, отличающийся тем, что нагрев гироскопа до рабочей температуры осуществляют при колебаниях его поплавковой камеры вокруг оси ее подвеса под действием периодически изменяющегося момента, прикладываемого со стороны датчика момента, а приведение платформы к заданному пространственному положению осуществляют после окончания нагрева.
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| НИКИТИН Е.А | |||
| и др | |||
| Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров | |||
| - М.: Машиностроение, 1969, с.115-118 | |||
| Термостатируемый поплавковый гироскоп | 1986 |
|
SU1450540A1 |
| US 4020701 А, 03.05.1977 | |||
| US 4448086 А, 15.05.1984. | |||

