Изобретение относится к области электрических машин.
Известно устройство измерения погрешности отображения тангенсной зависимости вращающегося трансформатора (ВТ), содержащее резистивные делители напряжения [1].
Данное устройство обладает низкой точностью и чувствительностью.
Наиболее близким по технической реализации является способ измерения погрешности отображения синусной зависимости ВТ, заключающийся в том, что измеряемый ВТ включают в компенсационную схему, компенсационная часть которой состоит из компенсирующего ВТ, с подключенными к его входу последовательно регулируемым резистором, а к выходу индукционным делителем напряжения (ИДН), определяют и фиксируют нулевое положение измеряемого ВТ, поворачивают его вал на 90 градусов от нулевого положения, выравнивают по амплитуде и фазе его выходное напряжение с помощью компенсирующей части схемы, поочередно выставляют вал измеряемого ВТ в заданные угловые положения, формируют компенсирующее напряжение, пропорциональное расчетному значению синуса выставленного угла, добиваются компенсации выходного напряжения измеряемого ВТ путем доворота его вала, вычитают полученное действительное значение угла из значения расчетного угла, переводят полученную угловую погрешность в относительные единицы (проценты), прототип [2].
К недостатку прототипа следует отнести его недостаточные функциональные возможности, в частности, с его помощью невозможно определить погрешность отображения тангенсной зависимости ВТ.
Целью изобретения является повышение точности и расширение функциональных возможностей способа.
Указанная цель достигается тем, что в способ измерения погрешности отображения синусной зависимости ВТ, заключающийся в том, что измеряемый ВТ включают в компенсационную схему, компенсационная часть которой состоит из компенсирующего ВТ с подключенными к его входу последовательно регулируемым резистором, а к выходу ИДН, определяют и фиксируют нулевое положение измеряемого ВТ, поворачивают его вал на 90 градусов от нулевого положения, выравнивают по амплитуде и фазе его выходное напряжение с помощью компенсирующей части схемы, поочередно выставляют вал измеряемого ВТ в заданные угловые положения, формируют компенсирующее напряжение, пропорциональное расчетному значению синуса выставленного угла, добиваются компенсации выходного напряжения измеряемого ВТ путем доворота его вала, вычитают полученное действительное значение угла из значения расчетного угла, переводят полученную угловую погрешность в относительные единицы (проценты), вводят следующие изменения и добавления. Создают вторую ветвь компенсационной схемы от того же компенсирующего ВТ, которую переключением соединяют с косинусной обмоткой измеряемого ВТ, поочередно определяют действительные значения синуса и косинуса выставленного угла путем переключения декадных переключателей ИДН, добиваясь при этом компенсации схемы, вычисляют погрешность отображения тангенсной зависимости по формуле
ΔTi=arctg[(sinαi)действ/(cosαi)действ]-αi,
где
ΔTi - погрешность отображения тангенсной зависимости в угловых единицах;
αi - i-e заданное значение выставленного угла;
i - порядковый номер выставленного угла;
(sinαi)действ - действительное значение синуса выставленного угла;
(cosαi)действ - действительное значение косинуса выставленного угла.
Работу предложенного способа удобно проиллюстрировать с помощью устройства, функциональная схема которого приведена на чертеже.
Устройство состоит из следующих элементов: источника питания переменного тока 1, проверяемого ВТ 2, компенсационного ВТ 3, ИДН 4 и 11, угломерного устройства (УУ) 5, вольтметров фиксированной частоты или анализаторов спектра 6 и 12, переключателей 7, 8, 9 и 13, регулируемого резистора 10.
Устройство работает следующим образом. После включения питания и прогрева схемы на выходах проверяемого 2 и компенсационного 3 ВТ имеем стабильные выходные напряжения. Декадные переключатели ИДН 4, присоединенного к выходу компенсирующего ВТ 3, выставляют в нулевые положения. Переключатели 7, 8 и 9 находятся в том положении, которое показано на чертеже. То есть в этом случае цепь с выхода компенсирующего ВТ 3 на вход ИДН 4 через переключатель 7 замкнута, а цепь с выхода ИДН 4 через вольтметр 6 и через переключатель 8 соединена с выходной синусной обмоткой ВТ 2. В показанном на чертеже положении имеет место прямое включение, когда соединены одноименные выводы проверяемого 2 и компенсирующего 3 ВТ, то есть С1 с С1 и С2 с С2. Переключатель 9 разомкнут - напряжение с компенсирующего ВТ 3 на косинусную обмотку проверяемого ВТ 2 не поступает. С помощью УУ 5, вал которого кинематически соединен с валом проверяемого ВТ 2, выставляют нулевое положение ВТ 2, определяемое по минимальному сигналу на вольтметре 6. Полученное выставленное нулевое положение считывают с УУ 5 и фиксируют, если приспособление сочленения вала ВТ 2 с УУ 5 не содержит регулировочного устройства для совмещения нулевых положений ВТ 2 и УУ 5. Например, если по УУ 5 получено при этом значение 0°3'47'', то оно учитывается при выставлении заданных согласно плану контроля углов. Если по плану контроля измерение осуществляют через каждые 2°, то выставляют углы соответственно 2°3'47'', 4°3'47'' и т.д.
После этого производят операцию компенсации. Для этого на ИДН 4 выставляют значение 1,000000, если используется ИДН типа ИДН-6. УУ 5 поворачивают вал проверяемого ВТ 2 на угол 90° от нулевого положения (для рассматриваемого примера на угол 90°3'47''). Поворотом вала компенсирующего ВТ 3 и изменением значения переменного стабильного резистора 10 добиваются компенсации выходного напряжения проверяемого ВТ, что происходит при минимальном показании вольтметра 6. Таким образом, этой операцией по компенсации максимальное выходное напряжение на синусной обмотке проверяемого ВТ приравнивается к единице. Благодаря этому на любом угле поворота проверяемого ВТ выставляем расчетное значение компенсирующего напряжения в относительных единицах. Например, на угле 2° на ИДН 4 выставляют 0,034899, на угле 30° - 0,500000 и т.д. Поскольку проверяемый ВТ не идеален, в каждом выставленном угловом положении следует определять реальное значение получаемого напряжения. Но, если согласно прототипу отклонение от расчетного значения определяют поворотом вала проверяемого ВТ, то в предлагаемом устройстве компенсации (выравнивания напряжений) необходимо добиваться переключением декад ИДН 4. Указанные приемы измерения осуществляют в диапазоне углов поворота от нуля до 180°. На углах от 180° до 360° выходное напряжение на синусной обмотке проверяемого ВТ изменяет знак на противоположный. В этом случае переключатель 8 перебрасывают на инверсионное включение, выходные концы обмоток проверяемого и компенсирующего ВТ соединяются при этом следующим образом: С2 с С1 и С1 с С2. Погрешность отображения синусной зависимости определяют напрямую, не переводя угловую погрешность в относительные единицы. Например, если на выставленном угле 2° при компенсации получено на ИДН 4 значение 0,034775, то погрешность будет равна Δs1=0,034775-0,034899=(-0,000124).
Далее измеряют погрешность отображения косинусной зависимости проверяемого ВТ 2. В этом случае перебрасывают переключатели 7 и 9 отключают тем самым от компенсирующего ВТ 3 синусную обмотку проверяемого ВТ, а подключают к нему косинусную обмотку проверяемого ВТ. При этом полученное ранее при подсоединенной синусной обмотке поверяемого ВТ компенсирующее напряжение не изменяется и используется при измерении погрешности отображения косинусной зависимости. Напряжение с выхода компенсирующего ВТ 3 через замкнутый переключатель 9 поступает на вход ИДН 11, с выхода которого через вольтметр 12 и переключатель 13 приходит к выходной косинусной обмотке проверяемого ВТ 2. Декадные переключатели ИДН 11 устанавливают в положение 1,000000. Измерение погрешности отображения косинусной зависимости начинают с нулевого положения, полученного ранее при подсоединении синусной обмотки. То есть это нулевое положение является исходным и для косинусной обмотки. Изменением положения декадных переключателей ИДН 11 от единичного (1,000000) значения добиваются компенсации выходного напряжения с косинусной обмотки измеряемого ВТ. Отклонение полученного на ИДН значения от единичного представляет собой погрешность отображения косинусной зависимости в нулевом положении. Она обусловлена неравенством коэффициентов трансформации между синусной и косинусной обмотками. Это измерение производят сразу после определения нулевого положения и после компенсации максимального напряжения на синусной обмотке. Это условие выполняют всегда в течение всего процесса измерения проверяемого ВТ, то есть в выставленном угловом положении измеряют погрешность отображения синусной зависимости, а потом следом за ней погрешность отображения косинусной зависимости. При измерении погрешности по синусной обмотке переключатель 9 разомкнут, при измерении погрешности по косинусной обмотке переключатель 9 замкнут, то есть измерения проводят таким образом, что компенсирующий ВТ соединен всегда только с одной выходной обмоткой проверяемого ВТ: либо с синусной, либо с косинусной.
Продолжение процесса измерения погрешности отображения косинусной зависимости аналогичен процессу измерения погрешности отображения синусной зависимости. Например, выставлен угол 2°3'47'' (его расчетное значение 2°). На ИДН 11 выставляют значение cos2°=0,999391. Это значение фиксируют, затем изменением значений декадных переключателей ИДН 11 добиваются компенсации действительного выходного напряжения. Допустим, что при этом получено значение 0,999408. Значение погрешности отображения косинусной зависимости на угле 2° составит Δc1=0,999408-0,999391=0,000017.
Погрешность отображения тангенсной зависимости на угле 2° определяют следующим образом. Сначала вычисляют действительное значение тангенса 2°: (tg2°)действ=(sin2°)действ/(cos2°)действ=0,034775/0,999408=0,034796.
Значение погрешности отображения тангенсной зависимости на угле 2° в относительных единицах равно:
Δт1=(tg2°)действ-tg2°=0,034796-0,034921=-0,000125.
Значение погрешности отображения тангенсной зависимости на угле 2° в угловых единицах определяют по формуле
Δт1=arctg[(sinα1+Δs1)/(cosα1+Δc1)]-α1=arctg[(0,034899+(-0,000124))/(0,999391+0,000017)]-2=26 угл.с.
Список документов
1. SU 393759, 1973.
2. ГОСТ РВ 51816.10-2001, с.14-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения точности вращающегося трансформатора | 1975 |
|
SU565354A1 |
| Способ испытания вращающегося трансформатора | 1974 |
|
SU545042A1 |
| Способ формирования синфазных переменных напряжений в функции угла поворота | 1982 |
|
SU1100689A1 |
| Устройство для измерения погрешности синусно-косинусного поворотного трансформатора | 1978 |
|
SU736152A1 |
| Устройство для проверки электрических машин | 1981 |
|
SU976467A1 |
| СПОСОБ ПРОВЕРКИ ПОГРЕШНОСТЕЙ ЭЛЕКТРИЧЕСКИХ | 1973 |
|
SU392589A1 |
| Устройство для измерения погрешности синусно-косинусного поворотного трансформатора | 1982 |
|
SU1056253A2 |
| Компенсационная схема для измерения амплитудно-фазовой погрешности индукционного синусно-косинусного преобразователя | 1950 |
|
SU111953A1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1751850A1 |
| Преобразователь угла поворота валаВ НАпРяжЕНиЕ пОСТОяННОгО TOKA | 1979 |
|
SU836644A1 |
Изобретение относится к области электрических машин и представляет собой способ настройки вращающегося трансформатора, заключающийся в том, что создают компенсационную схему от компенсирующего вращающегося трансформатора, первую ветвь соединяют с синусной обмоткой измеряемого вращающегося трансформатора, а вторую ветвь переключением соединяют с косинусной обмоткой. Выставляют вал вращающегося трансформатора в нулевое положение, фиксируют это нулевое положение, поворачивают вал от этого нулевого положения на 90 градусов, формируют компенсирующее напряжение, равное по амплитуде и фазе выходному напряжению на синусной обмотке измеряемого вращающегося трансформатора. Поочередно выставляют вал вращающегося трансформатора в заданные угловые положения, формируют расчётное значение синуса выставленного угла, поочерёдно определяют действительные значения синуса и косинуса выставленного угла, добиваясь при этом компенсации схемы путём изменения декадных переключателей индукционных делителей напряжения. Полученные действительные значения синуса делят на косинус и получают действительное значение тангенсной зависимости выставленного угла. Погрешность в относительных единицах получают, вычитая из действительного значения тангенса его расчётное значение. Достигаемый технический результат - повышение точности контроля и расширение его функциональных возможностей. 1 ил.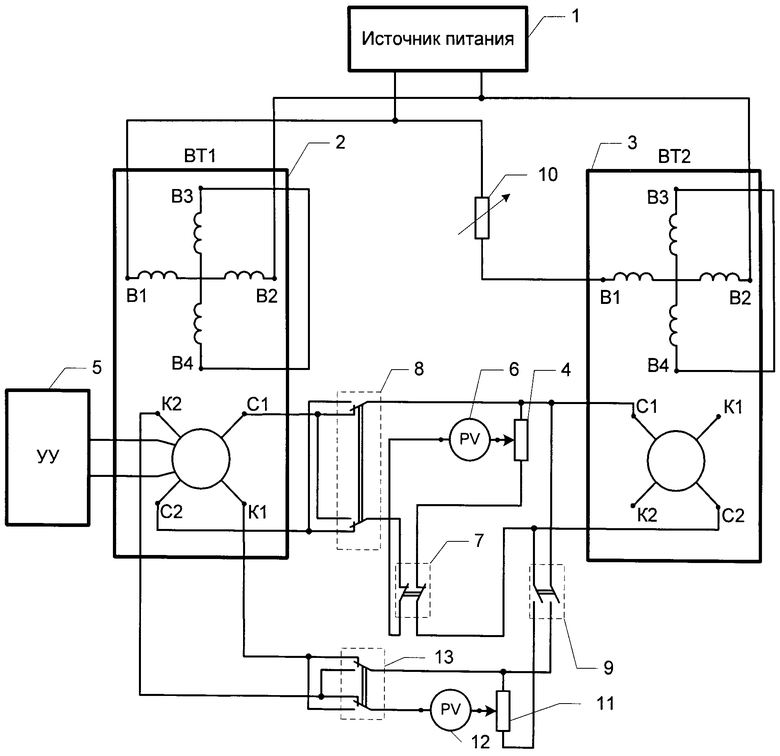
Способ измерения погрешности отображения тангенсной зависимости вращающегося трансформатора, заключающийся в том, что измеряемый вращающийся трансформатор включают в компенсационную схему измерения, выставляют вал вращающегося трансформатора в нулевое положение, фиксируют это нулевое положение, поворачивают вал от этого нулевого положения на 90 градусов, формируют компенсирующее напряжение, равное по амплитуде и фазе выходному напряжению на синусной обмотке измеряемого вращающегося трансформатора, поочередно выставляют вал вращающегося трансформатора в заданные угловые положения, формируют расчетное значение синуса выставленного угла, отличающийся тем, что создают вторую ветвь компенсационной схемы от того же компенсирующего вращающегося трансформатора, которую переключением соединяют с косинусной обмоткой измеряемого вращающегося трансформатора, поочередно определяют действительные значения синуса и косинуса выставленного угла, добиваясь при этом компенсации схемы путем изменения положения декадных переключателей индукционного делителя напряжения, вычисляют погрешность отображения тангенсной зависимости по формуле
Δтi=arctg[(sinαi)действ/(cosαi)действ]-αi,
где
Δтi - погрешность отображения тангенсной зависимости;
αi - i-e заданное значение выставленного угла;
i - порядковый номер выставленного угла;
(sinαi)действ - действительное значение синуса выставленного угла;
(cosαi)действ - действительное значение косинуса выставленного угла.
| Способ ломки стальных болванок | 1936 |
|
SU51816A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| CN 202353512 U, 25.07.2012 | |||
| Устройство для моделирования синусно-косинусного трансформаторного датчика угла | 1990 |
|
SU1778766A1 |
| Способ настройки моментного вентильного электродвигателя | 1985 |
|
SU1288833A1 |
| Устройство для выставки нулевого положения вращающегося трансформатора | 1981 |
|
SU1001337A1 |
| УСТРОЙСТВО для ПОВЕРКИ ЛИНЕЙНОСТИ ХАРАКТЕРИСТИК ПРЕОБРАЗОВАТЕЛЕЙ УГОЛ—ФАЗА | 0 |
|
SU342207A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ СИНУСНО-КОСИНУСНЫХ ПОВОРОТНЫХ ТРАНСФОРМАТОРОВ | 0 |
|
SU393759A1 |

