(5) УСТРОЙСТВО для ПРОВЕРКИ ЭЛЕКТРИЧЕСКИХ МАШИН
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для проверки решающих электрических машин | 1978 |
|
SU736156A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
| Цифро-аналоговая следящая система | 1981 |
|
SU1029143A1 |
| Поворотное устройство | 1980 |
|
SU898484A1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
1
Изобретение относится к автоматике и вычислительйой технике, в частности к устройствам для контроля передачи сигналов.
Известно устройство для проверки решаю1чих электрических машин, содержащее стакан для закрепления решающей электрической машины в корпусе устройства, шкалу электромеханическую, состоящую из ротора и статора в виде двух кольцевых зубчатых магнитопроводов с обмотками из последог вательно соединенных катушек, намотанных на каждом зубце, магнитопровода в противоположной на смежных зубцах полярности,два кольцевых корпуса , с помощью которых ротор и статор шагового двигателя устанавливаются соответственно на роторе и статоре проверяемой решающей электрической машины, редуктор, асинхронный двигатель, усилитель и переключатель.
Последовательное соединение катушек ротора и статоре шагового двига
теля обеспечивает высокую точность поворота ротора проверяемой электрической машины на заданныедискретные углы. Наличие асинхронного двигателя, усилителя и переключателя обеспечивает автоматизацию задания углов поворота ротора проверяемой решающей электрической машины. При повороте ротора решающей электрической машины на угол cL ее погрешность измеряется
to в виде разности ли между действительной и номинальной величинами амплитуды напряжерия, снимаемого с роторной обмотки. Для определения относитель,j но погрешности отображения синусной или косинусной зависимости решающей электрической машины, работающей в режиме синусно-косинусного вращающе|гося т| ансформатора (СКВТ), ае20личина и используется непосредственно.
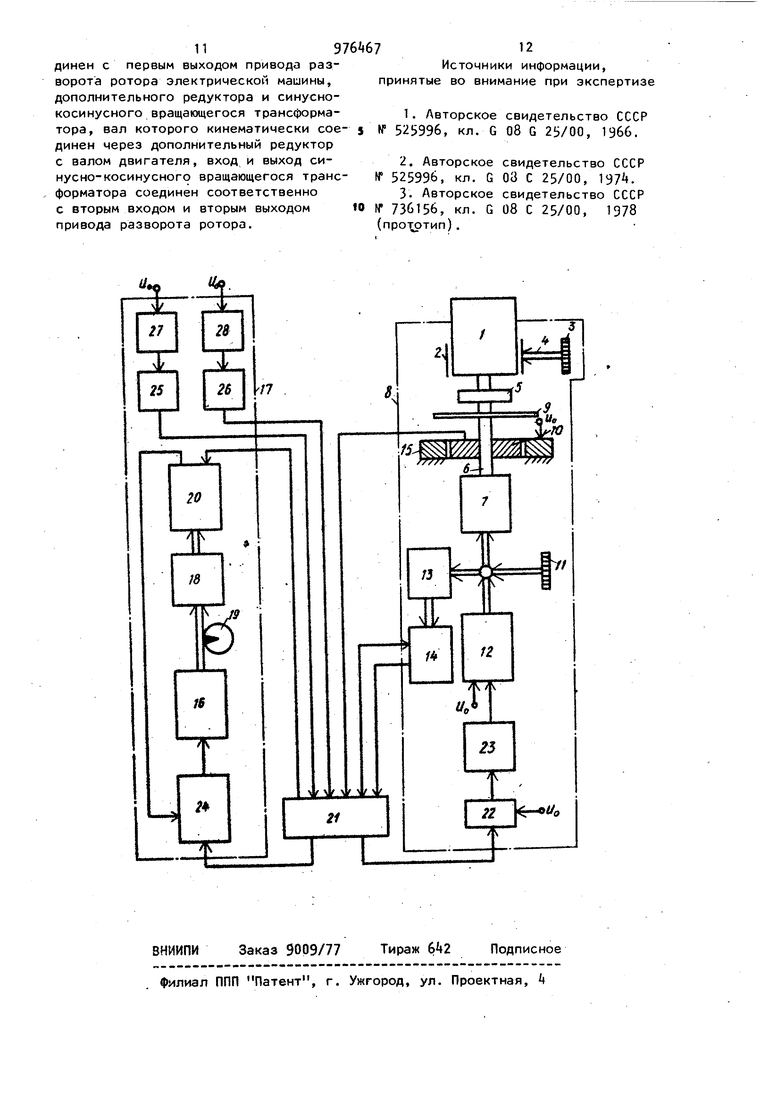
При определении величины асимметрии нулевых точек решающей электрической машины необходимо производить расчет по формулам ли. UgCoso6 Uj.,5 i itt где дв(.2. погрешности соответственно синусной и косинусной обмоток р шающей электрической машины, рад; и - максимальная амплиту да выходных напряжений lj. Однако при длительной эксплуатации устройства снижается его точность . Необходимость установки на каждой проверяемой решающей электрической машине двух кольцевых корпусов снижает производительность проверки. Кроме того, согласование исходного нулевого положения электротехнической шкалы с исходным нулевым положением проверяемой -решающей электрической машины является операцией, так как кольцевые кор пуса устанавливают непосредственно на роторе и статоре решающей электрической машины. К тому же устройство может быть использовано только в случае измерения погрёЬности проверяемой решающей электрической машины в виде разности между действительной и номинальной величинами амплитуды напряжения, снимаемого с роторной обмотки. Известно устройство для проверки электрических машин, содержащее привод автоматического поворота ротора проверяемой электрической машины, со стоящий из корпуса, yctaнoвлeннoгo на опоре вращения, шагового Двигателя ассинхронного двигателя усилителя, переключателей и первого ре дуктора, привод разворота статора ре шающей электрической машины, второй редуктор, маховик и шкалу погрешности проверяемой решающей электрической машины. Погрешность проверяемой электрической машины измеряется в виде угла uot, являющегося разностью между действительным и номинальным углами поворота ее ротора. Поворот ротора электрической машины на номинальный угол осуществляется с помощью привод автоматического поворота ротора, а на угол Лоб путем разворота корпуса привода на этот ) угол. Угол Ло считывается непосредственно по 1-жляе погрешности электрической машины. При определении, величины асимметрии нулевых точек ЭМ величина ло используется непосредственно. Для определения относительной погрешности отображения синусной или косинусной зависимостей необходимо производить расчет Соответственно по формулам Дсе со5о/ (3) . A«i5inc6 С) Устройство оОеспечивает автоматическое задание дискретных углов поворота ротора проверяемой электрической машины с высокой точностью Zj. Однако точность измерения погрешности проверяемой электрической машины в виде отклонения угла поворота ее ротора низка , так как полностью определяется погрешностью второго редуктора. Наиболее близким к предлагаемому по технической сущности является устройство для проверки решающих электрических машин, содержащее привод автоматического поворота ротора проверяемой электрической машины, состоящий из шкалы электромеханической, асинхронного двигателя, усилителя, первого переключателя, редуктора и маховика, привод рдзворота статора электрической машины, расшифровывающую следящую систему, состоящую из линейного вращающегося трансформатора, асинхронного двигателя, усилителя, масштабного трансформатора, фазирующего блока редуктора и шкалы погрешности проверяемой решающей электрической машины, второй переключатель. Погрешность проверяемой электрической машины измеряется в виде yi- ла Да(.. Устройствб обеспечивает автоматическое задание углов оС и измерение углов АоС с высокой точностью, ГЗJ. Однако необходимость проведения расчетов по формулам (З) и (4) для определения.относительной погрешности отображения синусной или косинусной зависимостей снижает производительность проверки решающей электрической машины.. Целью изобретения является расширение функциональных возможностей устройства за счет обеспечения возмощности считывания относительной погрешности отображения синусной или косинусной зависимостей непосредственно по шкале погрешности электрической машины, Поставленная цель достигается тем что в устройство для проверки электрических машин, содержащее переключатель, первый выход которого соединен с первым входом следящей системы второй выход соединен с первым входом привода разворота ротора, первый выход которого соединен с первым вхо дом переключателя, первый и второй, выходы следящей системы соединены с- вторым и третьим входами переключателя, третий выход которого соединен с вторым входом следящей системы, а четвертый выход соединен с вто рым входом привода разворота ротора второй выход которого соединен с четвертым входом переключателя. Кроме того, в устройстве для проверки электрических машин следящая система выполнена в виде усилителя, первый вход которого соединен с первым входом следящей системы, а выход - с входом двигателя, вал которого кинематически соединен со шкалой погрешности решающей электрической машины, а через редуктор - с ва лом линейно-вращающегося трансформатора, выход которого соединен с вторым входом усилителя, первого фазирующего блока, соединенного с первым масштабным трансформатором, второго фазирующего блока и второго масштабного трансформатора, выход второго фазирующего блока соединен с входом второго масштабного трансформатора, выход которого соединен с первым выходом следящей системы, выход первого масштабного трансформатора соединен с вторым выходом следящей систем вход линейно-вращающегося трансформатора соединен с вторым входом следящей системы. 1 Кроме того, в устройстве для проверки электрических машин привод раз ворота ротора выполнен в виде переключателя, первый вход которого соединен с первым входом привода развор та ротора, второй вход - с источником напряжения, а выход - с входом усилителя, выход которого соединен с входом двигателя, вал которого кинематически соединен с первым маховиком, а через редуктор - с ротором электромеханической шкалы, со шкалой и через муфту с валом электрической машины, которая установлена в стакане, который кинематически соеДинен с вторым маховиком, выход ротора электромеханической шкалы соединен с первым выходом привода разворота ротора электрической машины, дополнительного редуктора и синусно-косинусного вращающегося трансформатора, вал которого кинематически соединен через дополнительный редуктор с валом двигателя, вход и выходсинусно-косинусного вращающегося трансформатора соединены соответственно с вторым входом и вторым выходом привода разворота ротора. На чертеже приведена схема устройства. Проверяемую электрическую машину 1 устанавливают в стакане 2. Стакан 2 кинематически связан с маховиком 3 привода k разворота статора электрической машины. Ротор проверяемой электрической машины 1 муфтой 5 ки- нематически связан с ведомым валом 6 основного редуктора 7 привода 8 разворота ротора электрической машины. На ведомом валу 6 основного редуктора 7 закреплена шкала 9 отсчета дискретных углов поворота ротора электрической машины и ротора электромеханической шкалы 10. Ведущий вал редуктора 7 кинематически связан с маховиком 11, ротором асинхронного двигателя 12 и ведущим валом дополнительного редуктора 13. Ведомый вал дополнительного редуктора 13 кинематически связан с ротором СКВТ 1i. Статор электромеханической шкалы 15 жестко закреплен на корпусе устройства. Ротор асинхронного двигателя 16 расшифровывающей следящей системы 17 кинематически связан с ведущим валом редуктора 18 и шкалой погрешности 19 электрической машины. Ведомый вал редуктора 18 кинематически связан с ротором линейного вращающегося трансформатора 20. Обмотка ротора шагового двигателя 10 подключена через второй 21 и первый 22 переключатели и усилитель 23 к управляемой обмотке асинхронного двигателя 12, через переключатель 21 и усилитель 2 подключена к управляемой обмотке асинхронного двигателя 16 и через переключатель 21 подключена к входу СКВТ Н. Выход СКВТ Ik через переключатель 21 и усилитель 2k подключен к управляемой обмотке, асинхронного двигателя 16. Выходы масштабных трансформаторов 25 и 26 через переключатель 21 подключены к входу линейного аращакицегося трансформатора 20. Выход линейного вращающегося трансформатора 20 подключен к первому входу усилителя 2А. Оыход фазового блока 27 подключен к входу маештабного трансформатора 25, а выход фазового блока 28 подключен к входу масштабного трансформатора 26. Решающую электрическую машину 1 проверяют с помощью устройства следующим образом. . С помощью переключателя 21 обмотку .ротора электромеханической шкалы 10 отключают от второго входа усилителя 2k и входа СКВТ k и подключают к переключатело 22. Ротор электромеханической шкалы to и ведомый в.ал 6 редуктора 7 с помощью асинхронного двигателя 12, усилителя 23 и переключателя 22 автоматически устанавливают в нулевое положение. Устройство работает следующим образом. Проверяемую электрическую машину 1 устанавливают в стакане 2, при это ротор электрической машины 1 муфтой 5 кинематически соединяют с ведомым валом 6 редуктора 7 Вращая маховик 3 приводом Ц разворачивают статор электрической машины 1 до положения электрического нуля. С помощью асинхронного двигателя 12, усилителя 23 и переключателя 22 ротор электромеханической шкалы 10, ведомый вал 6 редуктора 7 и ротор электрической машины 1 автоматически поворачивают на номинальные дискретные углы. При этом амплитуда выходного напряжения проверяемой электрической машины 1 в дискретных угловых положениях может отличаться от номинальной. Если в заданном дискретном угловом положении ротора электрической машины 1 амплитуда ее выходного напряжения отличается от номинальной, то при измерении асимметрии нулевых точек переключателем 2t обмотку ротора электромеханической шкалы 10 от ключают от переключателя 22 и подключают к второму входу усилителя 2k, Переключателем 21 выход масштабного трансформатора 25 подключают к входу линейного вращающегося транс форматора 20. Маховиком 11 вручную разворачивают ротор электрической машины 1 на небольшой угол, при котором амплитуда ее выходного напряжения станет равной нулю. При этом напря :(ение на обмотке ротора электромеханической шкалы 10 равно некоторой величине, пропорциональной углу Дс.| (или д ctjLi). Это напряжение через переключатель 21 и усилитель 2k поступает на управляемую обмотку двигателя 16, который разворачивает ротор линейного вращающегося трансформатора на угол К (i ДсС.) при котором выходное напряжение линейного вpaщaюl; eгocя трансформатора равно выходному напряжению электромеханической шкалы. Коэффициент К определяется соотношениемK;-i2i.6oo, где 60 - предельный угол поворота . ротора линейного вращающегося трансформатора; 0,1 - наибольшая асимметрия нулевых точек электрической машины 1. Согласовывание амплитуд и фаз выходных напряжений линейного вращающегося трансформатора электромеханической шкалы на предельных углах поворота их роторов (соответственно 60 и 0,1) осуществляется с помощью трансформатора 25 и блока 27. При повороте трансформатора 20 одновременно поворачивается шкала 19, по которой отсчитывается асимметрия нулевых точек электрической машины 1. Если в заданном дискретном угловом .положении ротора электрической машины 1 амплитуда ее выходного напряжения отличается от номинальной, то при измерении относительной погрешности отображения синусной (косинусной) зависимости электрической маши ны переключателем 21 обмотку ротора электромеханической шкалы 10 отключают от переключателя 22 и подключают к входу СКВТ 1. Выход СКВТ 11) через переключатель 21 подключают к второму входу усилителя 2k. Переключателем 21 выход трансформатора 26 подключают к входу трансформатора 20. Маховиком 11 вручную разворачивают ротор электрической машины 1 на небольшой угол, при котором амплитуда выходного напряжения электрической машины 1 станет равной номинальной. При этом выходное напряжение СКВТ 1Ц равно некоторой величи не пропорциональной произведению (., до 5 inrf. Это напряжени через переключатель 21 и усилитель поступает на управляемую обмотку двигателя 1б, который разворачивает ротор линейного вращающегося трансформатора на угол jj&cL cos а(. (К,Д S i ) I при котором выходное напрянеиие линейного вращающегося трансформатора равно выходному напряжению СКВТ 14. Коэффициент К определяется соот ноц1ением R - - 12П а - 0,5 ° где 60° предельный угол поворота линейного вращающегося трансформатора; 0,5 - наибольшая погрешность отображения синусной (кос нусной) зависимости элект рической машины 1, выраже ная в угловой мере. Согласование фаз и амплитуд выходных напряжений линейного вращающегося трансформатора и СКВТ осуществляется при угле поворота линей ного вращающегося трансформатора на . Ротор СКВТ при этом устанавливается в нулевое поло хение, а ротор электромеханической шкалы 10 разворачивается на угол 0,5. При фаЬиро вании и масштабировании используютс трансформатор 2б и угловой блок 28. Относительная/погрешность синусной (косинусной) зависимостей отсчитывается по шкале 19 погрешностей. Устройство дает возможность отсчитывать асимметрию нулевых точек в виде углов Лс (uci), а относительную погрешность отображения сийусной (косинусной) зависимости в виде величин AUiди/а. -j-j- или j-j UQUcj Экономический эффект от внедрени предложенного устройства обусловлен его техническими преимуществами по сравнению с известными устройствами данного назначения. Формула изобретения 1. Устройство для проверки электрических машин, содержащее переключатель, первый выход которого соеди нен с первым входом следящей системы, второй выход соединен с первым входом привода разворота ротора электрической машины, первый выход KcfVopoго соединен с первым входом переключателя, отличающееся тем, что, с целью повышения быстродействия устройства, первый и второй выходы следящей системы соединены с вторым и третьим входами переключателя, третий выход которого соединен с вторым входом следящей системы, а четвертый выход соединен с вторым входом привода разворота ротора электрической машины, второй выход которого соединен с четвертым входом переключателя. 2.Устройство по п. 1, о т л и чающееся тем, что следящая система выполнена в виде усилителя, первый вход которого соединен с первым входом следящей системы, а выход - с входом двигателя, вал которого кинематически соединен со шкалой погрешности электрической машины, а через редуктор - с валом линейно-вращающегося трансформатора, выход которого соединен с вторым входом усилителя, первого фазирующего блока, соединенного с первым масштабным трансформатором, второго фазирующего блока и второго масштабного трансформатора, выход щторого фазирующего блока соединен с входом второго масштабного трансформатора, выход которого соединен с первым выходом следящей системы, выход первого масштабного трансформатора соединен с-вторым аыходом следящей системы, вход линейновращающегося трансформатора соединен с вторым входом следящей системы. 3.Устройство по п. 1, о т л и чающееся тем, что привод разворота ротора электрической машины выполнен в виде переключателя, первый вход которого соединен с первым входом привода разворота ротора электрической машины, второй вход - с источником напрях ения, а выход - с входом усилителя, выход которого соединен с входом двигателя, вал которого кинематически соединен с первым маховиком, а через редуктор - с рото-, ром электромеханической шкалы, со шкалой и через муфту с валом электрической машины, которая установлена в стакане, который кинематически соединен с вторым маховиком, выход ротора электромеханической шкалы сое11976 67
динеи с
первым выходом привода разворота ротора электрической машины, дополнительного редуктора и синуснокосинусного вращающегося трансформатора, вал которого кинематически соединен через дополнительный редуктор с валом двигателя, вход и выход синусно-косинусного вращающегося трансформатора соединен соответственно с вторым входом и вторым выходом привода разворота ротора.
12
Источники информации.
принятые во внимание при экспертизе
2,Авторское свидетельство СССР № 525996, кл. G 03 С 25/00, 197.
(прот;ртип).
