При исследовании синхронно-следящих систем часто возникает необходимость в экспериментальном определении с высокой степенью точности амплитудно-фазовых погрешностей индукционных синуснокосинусных преобразователей (вращающихся трансформаторов) класса 0,1-0,2.
Применение для этой цели известного компенсатора переменного тока Гейзера является затруднительным и неудобным, так как он дает погрешности при измерениях, превышающие 0,5%, не может компенсировать напряжение свыше 5 б и не дает возможности произвести непосредственный отсчет амплитудной погрешности прибора.
Предлагаемая схема позволяет устранить указанные недостатки и точно измерять амплитудную и фазовую погрешности синусно-косинусных преобразователей.
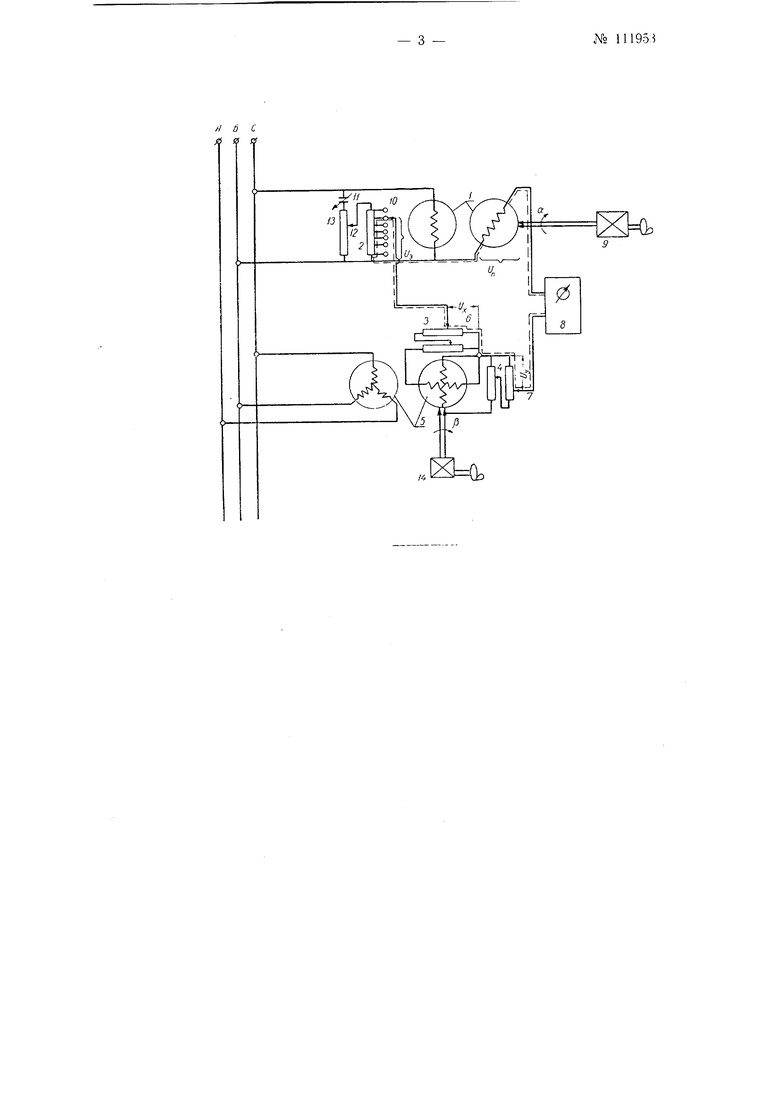
На чертеже изображена предлагаемая компенсационная схема. Действие схемы основано на сравнении выходного напряжения 0„ испытуемого прибора / с напряжением Uэ на эталонном синусном потенциометре 2. Эталонный потенциометр 2 имеет определенное количество заданных отводов, соответствующих синусу заданных углов (например, через каждые 5 или 10°).
Напряжение разбаланса Ь - U„ компенсируется двумя взаимно-перпендикулярными временными соответствуюцдими напряжениями f/j. и Ну (см- контур компенсации, обведенный на чертеже пунктиром), которые снимаются соответственно с линейных потенциометров . Для подачи на потенциометры 5 и 4 напряжений, сдвинутых по фазе на угол 90°, в схеме применен фазовращатель 5, выполненный, например, в виде сельсина или вращающегося трансформатора с трехфазной обмоткой на статоре (для получения вращающегося
№ 111953
магнитного поля) и с двумя взаимно-перпендикулярными обмотками на роторе. Величины напряжений U и Uу, необходимые для компенсации, устанавливаются с помощью движков 6 и 7 потенциометров 3 к 4Компенсация напряжения разбаланса фиксируется по катодному вольтметру 8, который служит в качестве нулевого прибора.
Определение амплитудной н фазовой ногрешностей с помощью предлагаемой схемы производится следующим образом.
Ротор испытуемого прибора У устаиавливается с помощью редуктора 9 в положение максимального выходного напряжения 6„. При этом положение вала редуктора принимается соответствующим повороту ротора испытуемого прибора точно на 90°.
Движок 10 устанавливается на последнюю ламель потенциометра 2, а движки 6 и 7 сдвигаются в нулевые положения, нри которых напряжения fy,. li U равны нулю. Затем с помощью подстрочной емкости JJ и движка 12 делителя напряжения 13 добиваются полной компенсации напряжения и„ при указанных условиях.
После проведения этой компенсации ротор 5 фазовращателя поворачивают е помощью редуктора 14 пя угол 3, так чтобы фаза напряжения на потенциометре 3 (или 4) совнала с фазой напряжения на эталонном сопротивлении, и фиксируется в этом положении на все время измерений.
Далее ротор испытуемого прибора / устанавливается с помощью редуктора 9 последовательно на различные углы, в соответствии с установкой движка 10 на ламели эталонного синусного потенциометра 2. Возникающая в каждом положении ротора иенытуемого прибора / разность между эталонным напряжением f) и нанряжением и„ на выходе прибора / компенсируется движками: 6 (компенсирует составляющую разбаланса U , совпадающую по фазе с напряжением 6) и 7 (компенеирует составляюндую разбаланса Uу, сдвинутую но фазе на 90° по отнощению к U,,).
Амплитудная погрешность испытуемого прибора при этом может быть определена по формуле:
д КТТТПТ/.
а фазовая погрещность - по формуле:
д . Дер Si Sincp ,
в - arctg- Точность измерения при применепии предлагаемой схемы определяется практически только точностью эталонного омического сопротивления Ra, которую лтожно обеспечить достаточно высокой (0,05-0,01% и выше).
Предмет изобретения
Компенсационная схема для измерения амплитудно-фазовой погрешности индукционного синусно-косинусного преобразователя, отличающаяся тем, что, с целью повышения точности измерения, применены эталонный синусный потенциометр и фазовращатель с двумя взаимно-перпендикулярными обмотками, подключенными к одинаковым потенциометрам, служащим для компенсации нанряжения погрешности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАГИСТРАЛЬНЫМ ЭЛЕКТРОВОЗОМ | 1966 |
|
SU187079A1 |
| Бесконтактный синусно-косинусный преобразователь | 1955 |
|
SU103888A1 |
| Следящий привод | 1985 |
|
SU1297005A1 |
| Устройство для определения частотных характеристик систем автоматического регулирования | 1971 |
|
SU443366A1 |
| Двухфазная индукционная дистанционная система передачи угла поворота | 1959 |
|
SU129969A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 1968 |
|
SU207966A1 |
| Индукционный прибор для преобразования напряжения переменного тока | 1953 |
|
SU103496A1 |
| Двухотсчетный преобразователь углапОВОРОТА ВАлА B КОд | 1979 |
|
SU840995A1 |
| СПОСОБ НАСТРОЙКИ ИНДУКЦИОННЫХ ФАЗОВРАЩАТЕЛЕЙ | 1971 |
|
SU303643A1 |
| Преобразователь напряжения переменного тока | 1951 |
|
SU97820A1 |