ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Представленное изобретение, в общем, относится к жаткам для уборки сельскохозяйственных культур для применения с устройствами для уборки сельскохозяйственных культур. Более конкретно оно относится к системе управления положением жатки, когда жатка использует определенный рабочий режим.
УРОВЕНЬ ТЕХНИКИ
Режущие узлы известных больших жаток машин для скашивания растений могут поддерживаться жатками, использующими различные рабочие режимы в зависимости от убираемой сельскохозяйственной культуры. Для некоторых сельскохозяйственных культур, таких как пшеница или ячмень, режущий узел может располагаться приблизительно в 6 дюймах над землей при уборке, например, комбайном. В ходе уборки подобных сельскохозяйственных культур, жатка комбайна может использовать рабочий режим, называемый обычно жесткий режим, поскольку режущий узел будет поддерживаться в жестком положении все время в процессе уборки. В отличие от них другие сельскохозяйственные культуры, такие как соя, требуют режущий узел, который при уборке должен быть расположен приблизительно в 1-2 дюймах над землей. Несмотря на то, что работая в жестком режиме жатка комбайна, как правило, делает максимальным количество убираемой сельскохозяйственной культуры, жатка комбайна предрасположена к повреждению вследствие столкновения с неровностями поверхности земли в поле. Вследствие вероятности подобных рабочих условий комбайн может использовать гибкий рабочий режим, в котором индивидуализированные рычаги, которые поддерживают небольшой участок режущего узла, выполнены с возможностью движения в ответ на столкновение с неровностями поверхности земли. Хотя использование гибкого рабочего режима лучше защищает режущий узел, эффективность уборки может снижаться. Однако в комбайнах с общепринятыми конструкциями при использовании жесткого рабочего режима оператор должен вручную регулировать жатку целиком, как правило, за счет поднятия и наклона, для того чтобы избежать повреждения от неровностей поверхности земли. Необходимость ручного регулирования накладывает дополнительную нагрузку на оператора комбайна, приводящую к усталости и другим нежелательным результатам.
Необходима система управления, которая обеспечивает автоматическое управление положением жатки (вертикальное и/или вращательное движение жатки) в ходе использования жаткой жесткого рабочего режима.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к жатке для уборки сельскохозяйственных культур для использования с рабочим транспортным средством, при этом жатка содержит первый рычаг, закрепленный с возможностью поворота с жаткой и выполненный с возможностью поддержания режущего аппарата. Первый рычаг выполнен с возможностью перемещения в ответ на столкновение с неровностями поверхности земли, когда жатка находится в первом рабочем режиме. Первый рычаг поддерживается в жестком положении относительно жатки, когда жатка находится во втором рабочем режиме. Вал содержит ось и закреплен на жатке, при этом вал содержит элемент, продолжающийся наружу от вала, причем вал продолжается по существу поперек направления движения жатки. Вал выполнен с возможностью вращения вокруг оси в ответ на введение участка элемента, удаленного от вала, в стыковой контакт с первым рычагом, когда жатка находится в первом рабочем режиме. Второй рычаг выполнен с возможностью вращательного движения вокруг оси вала, причем поверхность второго рычага, обращенная к земле, выполнена с возможностью столкновения с неровностями поверхности земли, когда жатка находится во втором рабочем режиме. Датчик функционально соединен со вторым рычагом и с контроллером, при этом датчик выполнен с возможностью, когда жатка находится во втором рабочем режиме, обнаружения, когда положение второго рычага находится в заданном положении, которое находится по меньшей мере в непосредственной близости к неровностям поверхности земли, когда жатка находится во втором рабочем режиме. В ответ на обнаружение датчиком положения второго рычага в заданном положении датчик сообщается с контроллером для осуществления по меньшей мере одного из вертикального и вращательного движений жатки относительно земли.
Кроме того, настоящее изобретение относится к набору для жатки для уборки сельскохозяйственных культур, который содержит первый рычаг, закрепленный с возможностью поворота на жатке и выполненный с возможностью поддержания режущего аппарата, причем первый рычаг выполнен с возможностью перемещения в ответ на столкновение с неровностями поверхности земли, когда жатка находится в первом рабочем режиме, и первый рычаг поддерживается в жестком положении относительно жатки, когда жатка находится во втором рабочем режиме. Предполагаемая жатка дополнительно содержит вал, содержащий ось и закрепленный на жатке, причем вал содержит элемент, продолжающийся наружу от вала, причем вал продолжается по существу поперек направления движения жатки, при этом вал выполнен с возможностью вращения вокруг оси в ответ на введение участка элемента, удаленного от вала, в стыковой контакт с первым рычагом, когда жатка находится в первом рабочем режиме. Набор изобретения содержит трубу, второй рычаг и датчик. Труба выполнена с возможностью расположения с возможностью вращения поверх вала. Второй рычаг выполнен с возможностью функционального соединения с трубой и продолжения из нее и содержит поверхность, выполненную с возможностью столкновения с неровностями поверхности земли, когда жатка находится во втором рабочем режиме. Датчик выполнен с возможностью функционального соединения со вторым рычагом и с контроллером. Когда жатка находится во втором рабочем режиме, а датчик соединен со вторым рычагом, датчик выполнен с возможностью обнаружения, когда положение второго рычага находится в заданном положении, которое находится по меньшей мере в непосредственной близости к неровностям поверхности земли. В ответ на обнаружение датчиком положения второго рычага в заданном положении датчик сообщается с контроллером для осуществления по меньшей мере одного из вертикального и вращательного движений жатки относительно земли.
Преимуществом настоящего изобретения является регулирование жатки, когда жатка использует жесткий рабочий режим.
Другие признаки и преимущества настоящего изобретения будут раскрыты в следующем более подробном описании предпочтительного варианта осуществления, взятого в сочетании с сопровождающими чертежами, которые иллюстрируют, в качестве примера, принципы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
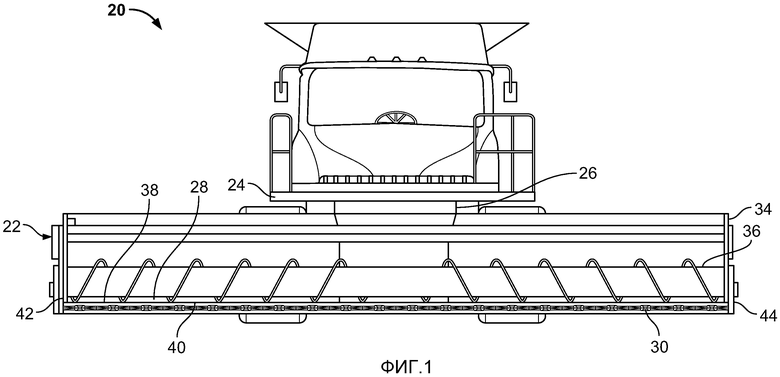
Фиг. 1 представляет собой вид спереди варианта осуществления устройства для уборки сельскохозяйственных культур и уборочной жатки настоящего изобретения.
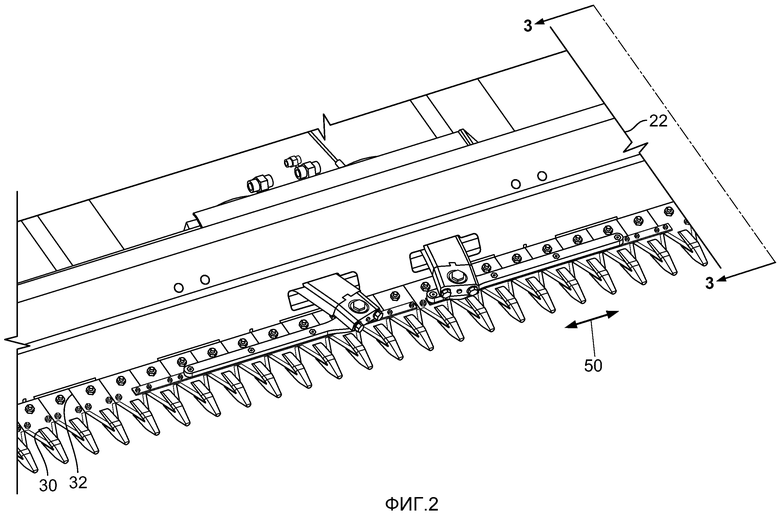
Фиг. 2 представляет собой общий вид сверху устройства для уборки сельскохозяйственных культур по фиг. 1 настоящего изобретения.
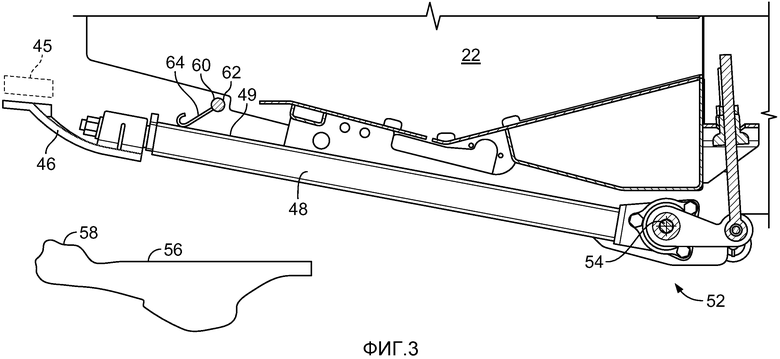
Фиг. 3 представляет собой поперечное сечение, сделанное по линии 3-3 настоящего изобретения.
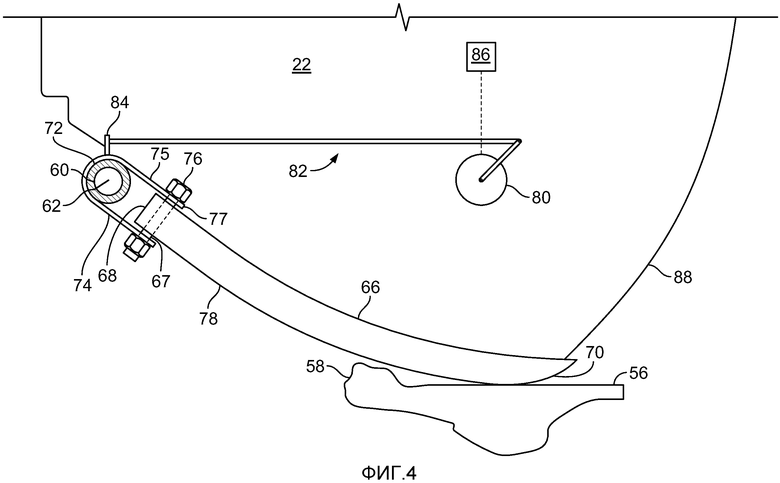
Фиг. 4 представляет собой поперечное сечение, сделанное по линии 3-3 настоящего изобретения.
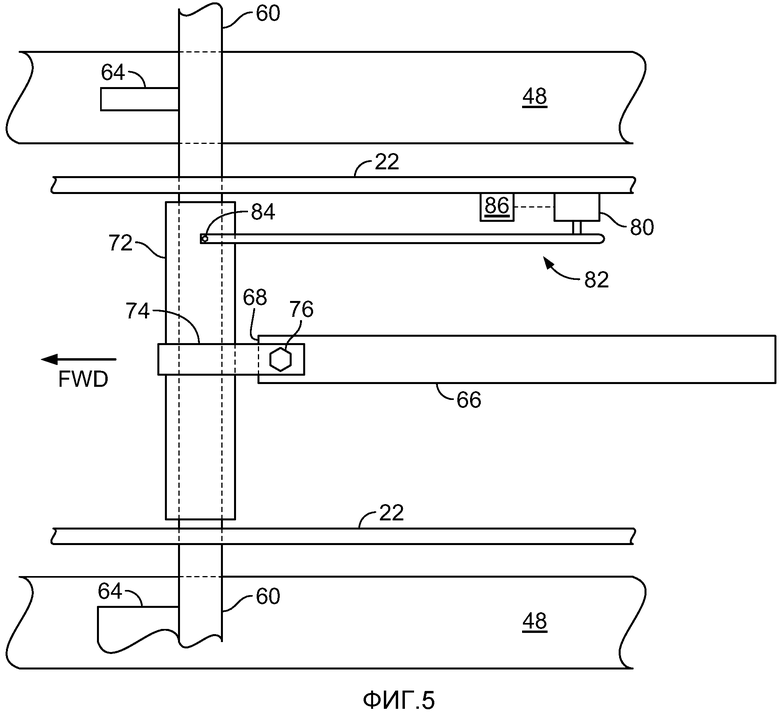
Фиг. 5 представляет собой вид сверху системы управления настоящего изобретения.
Везде, где возможно, одни и те же ссылочные позиции будут использоваться на всех чертежах для обозначения одних и тех же или одинаковых деталей.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 1 показан комбайн 20, который представляет собой хорошо известную сельскохозяйственную скашивающую и уборочную машину, также называемую иногда в общем смысле рабочим транспортным средством или рабочей машиной. Комбайн 20 включает в себя жатку 22, которая выполнена с возможностью срезания или отрывания сельскохозяйственных культур, включая (без ограничения) мелкие зерновые (например, пшеницу, сою), и для продвижения срезанных или сорванных сельскохозяйственных культур в приемный транспортер 26. Обе функции могут выполняться по мере движения комбайна 20 вперед по полю, занятому сельскохозяйственной культурой.
Жатка 22 присоединяется к переднему концу 24 комбайна 20 и включает в себя платформу или пол 28, который поддерживается на необходимом приближении к поверхности поля, занятого сельскохозяйственной культурой. Жатка 22 включает в себя вытянутый продолжающийся в стороны нож 30 режущего аппарата вдоль переднего краевого участка 32 (см. фиг. 2) пола 28. Косилка или нож 30 режущего аппарата выполнены с возможностью отрезания или отрывания сельскохозяйственных культур при подготовке к продвижению в приемный транспортер 26. В дополнение, жатка 22 может включать в себя удлиненное, продолжающееся в стороны мотовило 34, расположенное над ножом 30 режущего аппарата. Мотовило 34 выполнено с возможностью вращения в направлении, подходящем для облегчения продвижения срезанных или сорванных сельскохозяйственных культур в приемный транспортер 26. Жатка 22 дополнительно включает в себя удлиненный, вращающийся шнек 36, который продолжается в непосредственной близости к верхней поверхности 38 пола 28 и имеет вокруг него винтовые витки. Шнек 36 выполнен с возможностью взаимодействия с мотовилом 34 при продвижении срезанных или сорванных сельскохозяйственных культур в приемный транспортер 26, который выполнен с возможностью перемещения срезанных или сорванных сельскохозяйственных культур в комбайн 20 для обмолота и очистки. В качестве альтернативы, вместо вращающегося шнека 36, жатка 22 может включать в себя полотенную жатку или другую жатку для уборки/подбора сельскохозяйственной культуры.
Нож 30 режущего аппарата продолжается вдоль передней кромки 40 пола 28 и по существу ограничен первой боковой кромкой 42 и противоположной второй боковой кромкой 44, и та и другая относятся к полу 28. Нож 30 режущего аппарата поддерживается режущим аппаратом 45 (см. Фиг. 3), который таким же образом поддерживается первым участком 46 вытянутого элемента или первым рычагом 48, который будет обсуждаться более подробно ниже. Во время работы нож 30 режущего аппарата быстро совершает возвратно-поступательные движения для выполнения режущего или отрывающего действия, которое отрезает или отрывает стебли, черешки растения или другой материал, попадающий между лезвиями ножа режущего аппарата. Как обозначено стрелкой 50, лезвия ножа режущего аппарата могут совершать возвратно-поступательные движения в боковых направлениях.
Со ссылкой на фиг. 3 далее обсуждается действие первого рычага 48. Один конец первого рычага 48 вращается вокруг оси 54, которая удалена от режущего аппарата 45, причем данная ось продолжается по существу перпендикулярно направлению движения жатки 22. Регулировочный узел 52 обеспечивает регулируемую величину крутящего момента вокруг оси 54, обеспечивая по существу равномерное поддержание режущего аппарата 45 вдоль его длины. Действие регулировочного узла 52 раскрыто более подробно в находящейся на рассмотрении заявке заявителя № PCT/EP 2011/053787, озаглавленной "Cutterbar Support for a Crop Harvesting Header", которая включена в данную заявку посредством ссылки во всей своей полноте. Первый рычаг 48 во время работы или при использовании в первом рабочем режиме, также обычно называемом гибкий режим, обеспечивает возможность перемещения в ответ на столкновение с неровностями 58 поверхности земли, например в ходе уборки сельскохозяйственных культур, которые требуют, чтобы режущий аппарат 45 находился в непосредственной близости к земле. Другими словами, первый рабочий режим или гибкий режим обеспечивает возможность поверхности первого рычага 48, которая обращена к земле 56, вращения вверх или в направлении по часовой стрелке вокруг оси 54 в ответ на столкновение первого рычага с продолжающейся вверх неровностью 58 земли, существенно понижая возможность повреждения режущего аппарата.
Как дополнительно показано на фиг. 3, на жатке 22 с возможностью вращения закреплен вал 60, содержащий ось 62. Вал 60 продолжается по существу поперек направления движения жатки 22. Наружу от вала 60 продолжается палец или элемент 64, при этом элемент выровнен с соответствующим первым рычагом 48. То есть в первом рабочем режиме или гибком режиме жатки в ответ на достаточное вращение первого рычага 48 вокруг оси 54 в направлении вала 60 поверхность 49 первого рычага входит в контакт с элементом 64. При дальнейшем повороте первого рычага 48 в направлении вала 60 элемент 64 приводится во вращательное движение вокруг оси 62 вала, побуждая аналогичным образом вал 60 поворачиваться вокруг оси 62. В результате достаточного вращательного движения вала 60 вокруг оси 62 контроллер (не показан на фиг. 3) управляет движением жатки 22, например, в вертикальном направлении. В одном варианте осуществления вал 60 может продолжаться по меньшей мере на значительное расстояние поперек направления движения жатки 22, возможно перекрывая ширину жатки, при этом вал может включать в себя множество элементов 64, расположенных вдоль вала, каждый из которых соответствует соответствующему первому рычагу 48. В дополнительном варианте осуществления вал 60 может быть разделен на несколько участков, каждый из которых находится в сообщении с контроллером, обеспечивающим возможность осуществления движения жатки по меньшей мере с одним из вертикального и вращательного движений жатки относительно земли.
В отличие от первого рабочего режима или гибкого режима жатки второй рабочий режим или жесткий режим жатки включает, как видно из названия, совместное поддержание первых рычагов 48 в жестком положении во время работы комбайна во втором рабочем режиме или жестком режиме. В одном варианте осуществления второй рабочий режим или жесткий режим жатки достигается посредством предотвращения вращения первых рычагов 48 вокруг оси 54, например, посредством закрепления первых рычагов 48 на участке жатки 22, предотвращая посредством этого вращение вала 60. Раньше в общепринятой конструкции комбайна при использовании комбайна во втором рабочем режиме или жестком режиме независимое управление положением жатки в жестком или фиксированном положении было ограничено ручным регулированием оператором, подвергая оператора повышенному уровню напряжения, усталости и другим нежелательным результатам.
Фиг. 4-5 показывают дополнительные составные элементы системы управления жаткой, которые обеспечивают автоматическое управление положением жатки при использовании жатки во втором рабочем режиме или жестком режиме. Хотя составные элементы, показанные на фиг. 4, функционируют по отношению к валу 60, для целей ясности данные составные элементы не были ранее показаны на фиг. 3, но составные элементы, показанные на каждой из фиг. 3 и 4, показаны вместе на фиг. 5, которая представляет собой вид сверху участка жатки, содержащего составные элементы, показанные на Фиг. 3-4. Окружающая вал 60 труба 72 выполнена с возможностью приема с возможностью вращения вала 60. То есть труба 72 выполнена с возможностью по существу свободного вращения вокруг оси 62 вала 60. Зажим 74, такой как C-образный зажим, установлен поверх внешней поверхности трубы 72. После установки противоположные стенки 75 продолжаются вокруг трубы 72, при этом отверстия 77, образованные в стенках, выполнены с возможностью приема крепежного средства 76, которое продолжается сквозь отверстия и закреплено на зажиме с помощью крепежного средства. Хотя труба 72 выполнена с возможностью вращения вокруг оси 62 вала 60, зажим 74 предназначен для крепления или соединения с трубой 72 таким образом, чтобы зажим 74 не вращался относительно трубы 72.
Вытянутый калибровочный рычаг или второй рычаг 66 содержит первый конец 68 и противоположный второй конец 70. Второй рычаг 66 содержит проход 67, который выполнен с возможностью приема крепежного средства 76 и расположения между противоположными стенками 75 зажима 74 для закрепления второго рычага 66 с возможностью вращения относительно трубы 72. Около второго конца 70 имеется гибкий элемент 88, такой как цепь, который соединяет второй конец 70 с жаткой 22, обеспечивая возможность перенесения конца 70 в направлении жатки (и от земли), когда комбайн задействован в первом рабочем режиме или гибком режиме. Однако поскольку второй рычаг 66 закреплен внутри зажима 74, второй рычаг 66 не вращается относительно трубы 72. Кроме того, второй рычаг 66 содержит поверхность 78, которая обращена к земле 56 при закреплении в зажиме 74 и выполнена с возможностью столкновения с неровностями 58 поверхности земли в ответ на перемещение второго рычага над землей. То есть в ответ на столкновение поверхности 78 второго рычага 66 с неровностями 58 поверхности земли второй рычаг вращается вокруг оси 62 вала 60. Как показано, размещение крепежного средства 76 в вертикальной плоскости, продолжающейся в направлении движения жатки, обеспечивает возможность поворота второго рычага 66 в ответ на изменение направления комбайна, например, комбайна, выполняющего поворот. Рычажный механизм 82 также соединен на одном конце, например, с помощью крепежного средства 84, с трубой 72. Как показано, крепежное средство 84 обеспечивает возможность вращательного движения между рычажным механизмом 82 относительно трубы 72, такого, которое может происходить при вращении самой трубы 72, вызванном неровностью земли. Крепежное средство 84 обеспечивает по существу негибкое вращательное движение рычажного механизма 82 относительно земли 56. Рычажный механизм 82 продолжается от одного конца, близкого к трубе 72, до противоположного конца, связанного с датчиком 80, таким как потенциометр, который функционально соединен с контроллером 86. Другие типы датчиков могут включать, но без ограничения, концевые выключатели и датчики на эффекте Холла, хотя также могут использоваться механические датчики. Как показано, датчик 80, который закреплен на жатке, функционально соединен со вторым рычагом 66 с помощью рычажного механизма 82, а также функционально соединен с контроллером 86, обеспечивая возможность обнаружения датчиком 80 положения второго рычага 66.
Когда жатка используется во втором рабочем режиме, в котором предотвращается вращение вала 60 вокруг оси 62 в ответ на столкновение поверхности 78 второго рычага 66 с неровностью 58 земли (в данном примере с поднятой неровностью земли относительно вертикальной проекции окружающей земли), второй рычаг 66 вращается вокруг оси 62 в направлении против часовой стрелки. Второй рычаг 66 аналогичным образом вызывает вращение трубы 72, а также крепежного средства 84 в направлении против часовой стрелки вокруг оси 62. Посредством рабочих соединений рычажный механизм 82 придает вращательное движение, связанное с соединением между рычажным механизмом 82 и датчиком 80. Вращательное движение изменяет напряжение датчика 80. При достижении или превышении напряжением датчика 80 заданного значения амплитуды напряжения, подвергнутого мониторингу контроллером 86 посредством рабочего соединения между датчиком и контроллером, что является хорошо известным, положение жатки смещается или сдвигается по меньшей мере в одном из вертикального направления и вращательного направлений вокруг оси, то есть по существу параллельно направлению движения жатки.
Следует понимать, что набор может быть выполнен с возможностью модернизации существующего комбайна, обеспечивая возможность регулирования жатки, как обсуждалось ранее. Поскольку элемент 64 может быть постоянно закреплен на валу 60, например, с помощью сварки для того, чтобы предоставить возможность установки множества труб 72, каждая из труб может состоять из участков трубы, например, двух или более участков трубы, которые могут быть сведены вместе для приема вала перед сборкой участков трубы. В одном варианте осуществления два или более участков трубы могут быть закреплены вместе таким образом, чтобы предоставить возможность удобной разборки, например, с использованием механических крепежных средств. В одном варианте осуществления, набор может содержать трубу 72 или участки трубы для образования по меньшей мере одной трубы 72, второй рычаг 66, зажим 74, крепежные средства 76, рычажный механизм 82, крепежное средство 84, датчик 80 и контроллер 86, с включением достаточного количества электрических проводов по необходимости. В дополнительном варианте осуществления контроллер 86 уже может содержаться в существующей конфигурации комбайна. Конечно, набор множества составных элементов по меньшей мере из трубы 72, второго рычага 66, зажима 74, крепежного средства 76, рычажного механизма 82, крепежного средства 84 и датчика 80 (и возможно контроллера 86) может быть необходим для других конфигураций набора.
Следует понимать, что могут быть использованы другие компоновки между датчиком и контроллером, что может быть использовано множество датчиков и что датчик может работать, используя различные принципы действия, для достижения необходимых результатов. Например, датчик может быть потенциометром, но в качестве альтернативы он может использовать оптическую схему или другие механические или электромеханические принципы действия. То есть рабочее соединение между датчиком и контроллером может быть электрическим и/или механическим при условии, что автоматически достигается управление жаткой (вертикальное и/или вращательное движение) при использовании жатки во втором рабочем режиме или жестком режиме.
Несмотря на то, что изобретение было описано со ссылкой на предпочтительный вариант осуществления, квалифицированным специалистам в данной области следует понимать, что могут быть сделаны различные изменения, а для их элементов могут быть заменены эквиваленты, не выходя за пределы изобретения. В дополнение, для адаптации конкретной ситуации или материала к идеям изобретения может быть сделано множество модификаций, не выходя за пределы сущности изобретения. Вследствие этого предполагается, что изобретение не должно ограничиваться конкретным вариантом осуществления, раскрытым в качестве наилучшего варианта, предусматриваемого для осуществления данного изобретения, но что изобретение будет включать в себя все варианты осуществления, попадающие в пределы приложенной формулы изобретения.
Группа изобретений относится к сельскохозяйственному машиностроению. Жатка для уборки сельскохозяйственных культур для использования с рабочим транспортным средством включает в себя вал, продолжающийся по существу поперек направления движения жатки. Вал вращается вокруг своей оси в ответ на контакт участка элемента с первым рычагом, когда жатка находится в первом рабочем режиме. Вал не вращается вокруг своей оси, когда жатка находится во втором рабочем режиме. Второй рычаг вращается вокруг вала в ответ на неровности поверхности земли, когда жатка находится во втором рабочем режиме. Датчик, когда жатка находится во втором рабочем режиме, функционально соединенный со вторым рычагом и с контроллером, обнаруживает, когда второй рычаг находится в заданном положении. Датчик сообщается с контроллером для осуществления движения жатки относительно земли, когда жатка находится во втором рабочем режиме. Использование группы изобретений обеспечивает автоматическое управление положением жатки в ходе использования жаткой второго рабочего режима. 2 н. и 12 з.п. ф-лы, 5 ил.
1. Жатка (22) для уборки сельскохозяйственных культур для использования с рабочим транспортным средством, содержащая:
первый рычаг (48), закрепленный с возможностью поворота на жатке (22) и выполненный с возможностью поддержания режущего аппарата (45), при этом первый рычаг (48) выполнен с возможностью перемещения в ответ на столкновение с неровностями (58) поверхности земли, когда жатка (22) находится в первом рабочем режиме, причем первый рычаг (48) поддерживается в жестком положении относительно жатки (22), когда жатка (22) находится во втором рабочем режиме; и
вал (60), содержащий ось (62) и закрепленный на жатке (22), причем вал (60) содержит элемент (64), продолжающийся наружу от вала, продолжающегося по существу поперек направления движения жатки (22) и выполненного с возможностью вращения вокруг оси (62) в ответ на введение участка элемента (64), удаленного от вала (60), в стыковой контакт с первым рычагом (48), когда жатка (22) находится в первом рабочем режиме,
отличающаяся тем, что жатка дополнительно содержит:
второй рычаг (66), выполненный с возможностью вращательного движения вокруг оси (62) вала (60), причем поверхность (78) второго рычага (66), обращенная к земле (56), выполнена с возможностью столкновения с неровностями (58) поверхности земли, когда жатка (22) находится во втором рабочем режиме; и
датчик (80), функционально соединенный со вторым рычагом (66) и с контроллером (86) и выполненный с возможностью, когда жатка (22) находится во втором рабочем режиме:
обнаружения, когда положение второго рычага (66) находится в заданном положении, которое находится по меньшей мере в непосредственной близости к неровностям (58) поверхности земли; и
в ответ на обнаружение датчиком (80) положения второго рычага (66) в заданном положении сообщения с контроллером (86) для осуществления по меньшей мере одного из вертикального и вращательного движения жатки (22) относительно земли (56).
2. Жатка по п. 1, в которой первый рычаг (48) и второй рычаг (66) продолжаются по существу в направлении движения жатки (22), а каждый из переднего конца первого рычага (48) и переднего конца второго рычага (66) расположен смежно с валом (60).
3. Жатка по п. 1, в которой второй рычаг (66) соединен с валом (60) с использованием крепежного средства (76), расположенного в вертикальной плоскости, обеспечивающего боковой поворот второго рычага (66) к валу (60).
4. Жатка по п. 1, в которой второй рычаг (66) прикреплен к трубе (72), которая принимает с возможностью вращения вал (60).
5. Жатка по п. 4, в которой труба (72) содержит по меньшей мере два участка, которые сведены вместе для приема вала (60).
6. Жатка по п. 4 или 5, в которой датчик (80) соединен с трубой (72).
7. Жатка по п. 6, в которой датчик (80) закреплен в заданном положении на жатке (22) и соединен с трубой рычажным механизмом (82).
8. Жатка по п. 1, в которой контроллер (86) находится в электронном сообщении с датчиком (80).
9. Жатка по п. 8, в которой датчик (80) представляет собой потенциометр, концевой переключатель или датчик на эффекте Холла.
10. Набор для жатки (22) для уборки сельскохозяйственных культур, которая содержит:
первый рычаг (48), закрепленный с возможностью поворота на жатке (22) и выполненный с возможностью поддержания режущего аппарата (45), причем первый рычаг (48) выполнен с возможностью перемещения в ответ на столкновение с неровностями (58) поверхности земли, когда жатка (22) находится в первом рабочем режиме, причем первый рычаг (48) поддерживается в жестком положении относительно жатки (22), когда жатка (22) находится во втором рабочем режиме; и
вал (60), содержащий ось (62) и закрепленный на жатке (22), причем вал (60) содержит элемент (64), продолжающийся наружу от вала, продолжающегося по существу поперек направления движения жатки (22) и выполненного с возможностью вращения вокруг оси (62) в ответ на введение участка элемента (64), удаленного от вала (60), в стыковой контакт с первым рычагом (48), когда жатка (22) находится в первом рабочем режиме,
при этом набор содержит:
трубу (72), выполненную с возможностью расположения с возможностью вращения на валу (60);
второй рычаг (66), выполненный с возможностью функционального соединения с трубой (72) и продолжения из нее, при этом второй рычаг (66) содержит поверхность (78), выполненную с возможностью столкновения с неровностями (58) поверхности земли, когда жатка (22) находится во втором рабочем режиме; и
датчик (80), выполненный с возможностью функционального соединения со вторым рычагом (66) и с контроллером (86), при этом датчик (80) выполнен с возможностью, когда жатка (22) находится во втором рабочем режиме и датчик (80) соединен со вторым рычагом (66):
обнаружения, когда положение второго рычага (66) находится в заданном положении, которое находится по меньшей мере в непосредственной близости к неровностям (58) поверхности земли; и
в ответ на обнаружение датчиком (80) положения второго рычага (66) в заданном положении сообщения с контроллером (86) для осуществления по меньшей мере одного из вертикального и вращательного движений жатки (22) относительно земли (56).
11. Набор по п. 10, в котором, когда труба (72) расположена на валу (60), а второй рычаг (66) функционально соединен с трубой (72), первый рычаг (48) и второй рычаг (66) продолжаются по существу в направлении движения жатки (22), а каждый из переднего конца первого рычага (48) и переднего конца второго рычага (66) расположен смежно с валом (60).
12. Набор по п. 10, в котором труба (72) содержит по меньшей мере два участка, которые сведены вместе для приема вала (60).
13. Набор по п. 10, который дополнительно содержит рычажный механизм (82) для функционального соединения датчика (80) со вторым рычагом (66).
14. Набор по п. 10, который дополнительно содержит контроллер (86), выполненный с возможностью осуществления по меньшей мере одного из вертикального и вращательного движений жатки (22) относительно земли (56) в ответ на обнаружение датчиком (80) положения второго рычага (66).
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

