Настоящее изобретение относится к машине для уборки сельскохозяйственной культуры с плавающей системой на гидравлических цилиндрах с электронным управлением для жатки на несущем тракторе. В частности, устройство, во-первых, обеспечивает конструкцию, в которой эффект статического трения, создаваемого уплотнениями цилиндра, значительно снижается для уменьшения сопротивления движению цилиндра при плавающем перемещении. Во-вторых, устройство обеспечивает динамическую систему управления, которая изменяет усилия, прикладываемые цилиндром, в ответ на перемещение жатки относительно трактора. Настоящее изобретение может использоваться во множестве различных взаимодействующих систем, таких как сеноуборочные инструменты, грабли, подборщики и т.д., но особенно применимо для валкоукладчиков или виндроуэров, в которых жатка поддерживается на тракторе валкоукладчика, и для уборочных комбайнов, в которых жатка поддерживается переходником комбайна, соединенным с наклонной камерой. При использовании для срезания сельскохозяйственной культуры во время уборки урожая жатка может использовать различные режущие системы, включая режущие аппараты, ротационные косилки или подобные режущие устройства.
ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
Большинство виндроуэров на рынке имеют гидравлическую плавающую систему для жатки. Плавающие системы такого типа подвешивают жатку на виндроуэре таким образом, что небольшая часть веса жатки поддерживается землей. Преимущества гидравлических плавающих систем такого типа включают возможность простой адаптации к широкому диапазону весов/типов жаток, возможность полной регулировки плавающей системы из кабины, небольшое количество подвижных частей, компактность, встроенные демпфирующие эффекты и хорошая репутация на рынке.
Однако из-за внутреннего трения уплотнений плавающих цилиндров, эти системы обычно имеют плохую способность огибания рельефа земли, если масса, поддерживаемая землей, не является существенной, порядка 15% массы жатки. При таком уровне давления на землю (масса жатки, поддерживаемая землей) значителен износ взаимодействующих с землей компонентов. Также при столкновении с препятствием более высокое давление на землю нежелательно.
В традиционных гидравлических плавающих системах каждый из плавающих цилиндров жатки соединен с соответствующим аккумулятором, датчиком давления и клапаном регулировки давления. Клапаны регулировки давления, в свою очередь, соединены с источником гидравлического давления, например, с чувствительным к нагрузке насосом. Контроллер принимает входные сигналы от датчиков давления и выполняет регулировку клапанов регулировки давления для поддержания известного давления в контуре аккумулятора/цилиндра. Система аккумулятор/цилиндр действует, как пружина, так что, когда жатка сталкивается с препятствием и должна обойти препятствие, аккумулятор подает давление и поток в цилиндр для содействия перемещению жатки. Когда жатка должна опуститься в канаву или углубление, плавающий цилиндр подает масло обратно в аккумулятор.
Компания MacDon традиционно использует пружинную плавающую систему спирального типа, которая не имеет таких ограничений трения и обычно имеет лучшую способность огибания рельефа земли. Типичная пружинная плавающая система компании MacDon может достигать давления на землю порядка 10% массы жатки, сохраняя приемлемую способность огибания рельефа земли. Пружинные плавающие системы в настоящее время используются на виндроуэрах и переходниках комбайнов компании MacDon.
Плавающие системы для жаток обычно используют контур текучей среды, включающий в себя аккумулятор, гидравлические цилиндры и регулировочные клапаны для реализации функции плавания. Транспортные средства могут иметь один гидравлический цилиндр или по одному с каждой стороны жатки для выполнения функции подъема и плавания, или они могут иметь отдельные гидравлические цилиндры для выполнения функций подъема и плавания с возможностью независимой регулировки усилия плавания для каждой стороны жатки. Как правило, оператор выбирает требуемую настройку режима плавания путем приведения в действие кулисных переключателей; причем одно положение переключателя уменьшает усилие при контакте жатки с землей, а другое положение увеличивает усилие при контакте жатки с землей. После выбора настройки режима плавания регулировочные клапаны будут возвращаться к этому заданному условию плавания при каждом выборе режима плавания, независимо от последующих операций подъема и опускания жатки.
Одним аспектом настройки режима плавания, выбранной оператором, является то, что она определяет, насколько быстро жатка возвращается при управляемом ускорении или управляемом «падении» в положение контакта с землей после подъема в ответ на контакт с возвышающимся элементом рельефа. Если жатка падает слишком медленно, области поля не могут быть обработаны на требуемой высоте. Однако, если жатка падает слишком быстро, жатка может сильно ударяться о землю или прокатываться по земле, что приводит к нежелательно резким или раздражающим характеристикам езды. Также в определенных условиях, например, на пересеченном рельефе, жатка может достаточно сильно ударяться о землю, что может привести к повреждению жатки и/или сельскохозяйственной культуры. Как правило, настройка режима плавания оператором будет зависеть по меньшей мере частично от скорости транспортного средства относительно земли. Как правило, при перемещении по полю с пересеченным рельефом с относительно низкой скоростью огибание рельефа может быть достигнуто при меньшем ускорении жатки по сравнению с более высокой скоростью. Таким образом, для перемещения на более низких скоростях оператор вероятнее всего будет использовать настройку режима плавания, позволяющую жатке опускаться медленнее, чем выбрано для более высокой скорости.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с первым определением изобретения предложена машина для уборки сельскохозяйственной культуры, содержащая:
несущее транспортное средство для перемещения по земле в направлении перемещения вперед;
раму, имеющую по меньшей мере первый участок рамы и второй участок рамы;
причем каждый из первого и второго участков рамы имеет обрабатывающий сельскохозяйственную культуру компонент, включающий в себя взаимодействующую с сельскохозяйственной культурой систему и по меньшей мере один взаимодействующий с землей компонент для обеспечения поддерживающего усилия от земли;
причем первый участок рамы шарнирно соединен со вторым участком рамы вокруг оси, в общем параллельной направлению вперед, для поворотного перемещения второго участка рамы относительно первого участка рамы вверх и вниз;
первое поддерживающее устройство для поддержания первого участка рамы относительно транспортного средства так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента обеспечивается подъемным усилием от поддерживающего устройства, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом за счет давления на землю;
причем первое поддерживающее устройство выполнено с возможностью поддержания обрабатывающего сельскохозяйственную культуру компонента для плавающего перемещения первого участка рамы относительно транспортного средства вверх и вниз, причем первое поддерживающее устройство содержит по меньшей мере один первый гидравлический плавающий цилиндр и первую гидравлическую систему, содержащую гидравлическую текучую среду под давлением;
второе поддерживающее устройство для поддержания второго участка рамы относительно первого участка рамы так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента на втором участке рамы обеспечивается подъемным усилием от первого участка рамы, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом второго участка рамы за счет давления на землю;
причем второе поддерживающее устройство выполнено с возможностью поддержания обрабатывающего сельскохозяйственную культуру компонента для плавающего перемещения второго участка рамы относительно первого участка рамы вверх и вниз, причем второе поддерживающее устройство содержит по меньшей мере одним второй гидравлический плавающий цилиндр и вторую гидравлическую систему, содержащую гидравлическую текучую среду под давлением;
и электронную систему управления для подачи сигнала управления для изменения давления по меньшей мере первой гидравлической системы и приема сообщения от по меньшей мере одного датчика связи на указанном втором поддерживающем устройстве так, что указанное поворотное перемещение второго участка рамы относительно первого участка рамы изменяет давление в первой гидравлической системе.
В соответствии со вторым определением изобретения предложена машина для уборки сельскохозяйственной культуры, содержащая:
несущее транспортное средство для перемещения по земле в направлении перемещения вперед;
раму, имеющую по меньшей мере первый участок рамы и второй участок рамы;
причем каждый из первого и второго участков рамы имеет обрабатывающий сельскохозяйственную культуру компонент, включающий в себя взаимодействующую с сельскохозяйственной культурой систему и по меньшей мере один взаимодействующий с землей компонент для обеспечения поддерживающего усилия от земли;
причем первый участок рамы шарнирно соединен со вторым участком рамы вокруг оси, в общем параллельной направлению вперед, для поворотного перемещения второго участка рамы относительно первого участка рамы вверх и вниз;
первое поддерживающее устройство для поддержания первого участка рамы относительно транспортного средства так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента обеспечивается подъемным усилием от поддерживающего устройства, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом за счет давления на землю;
причем первое поддерживающее устройство выполнено с возможностью поддержания обрабатывающего сельскохозяйственную культуру компонента для плавающего перемещения первого участка рамы относительно транспортного средства вверх и вниз, причем первое поддерживающее устройство содержит по меньшей мере один первый гидравлический плавающий цилиндр и первую гидравлическую систему, содержащую гидравлическую текучую среду под давлением;
второе поддерживающее устройство для поддержания второго участка рамы относительно первого участка рамы так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента на втором участке рамы обеспечивается подъемным усилием от первого участка рамы, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом второго участка рамы за счет давления на землю;
причем второе поддерживающее устройство выполнено с возможностью поддержания обрабатывающего сельскохозяйственную культуру компонента для плавающего перемещения второго участка рамы относительно первого участка рамы вверх и вниз, причем второе поддерживающее устройство содержит по меньшей мере одним второй гидравлический плавающий цилиндр и вторую гидравлическую систему, содержащую гидравлическую текучую среду под давлением;
причем первая и вторая системы подъемного давления включают в себя общий аккумулятор так, что сгибание вниз второго участка рамы подает дополнительную текучую среду в цилиндр первой гидравлической системы для приложения дополнительного подъемного давления к первому участку рамы, и так, что сгибание вверх второго участка рамы извлекает текучую среду из цилиндра первой гидравлической системы для приложения уменьшенного подъемного давления к первому участку рамы;
и электронную систему управления для подачи сигнала управления для изменения давления по меньшей мере первой гидравлической системы.
Устройство, изложенное в любом из определений, может быть выполнено так, что электронная система управления принимает сообщение как от первого поддерживающего устройства, так и от второго поддерживающего устройства для изменения давления как первой, так и второй гидравлических систем.
Устройство, изложенное в любом из определений, может быть выполнено так, что датчик связи содержит датчик перемещения, реагирующий на перемещение второй поддерживающей системы.
Устройство, изложенное в любом из определений, может быть выполнено так, что первый и второй гидравлические плавающие цилиндры взаимодействуют с соответствующими первым и вторым клапанными устройствами, выполненными с возможностью изменения давления в камере соответствующего цилиндра для обеспечения требуемого переменного подъемного усилия.
Устройство, изложенное в любом из определений, может быть выполнено так, что клапанное устройство имеет характеристику, заключающуюся в том, что клапанное устройство действует для поддержания давления гидравлической текучей среды в камере на постоянном значении, причем это значение зависит от сигнала управления, подаваемого на клапанное устройство, во время изменений объема камеры, вызванных перемещением поршня.
Устройство, изложенное в любом из определений, может быть выполнено так, что электронная система управления для выполнения указанных временных изменений запрограммирована с возможностью ответа на сигнал перемещения от датчика перемещения, а не на изменения давления в камере, которые вызваны перемещением поршня.
В одном предпочтительном устройстве первая гидравлическая система содержит первую систему подъемного давления, выполненную с возможностью приложения давления к стороне поршня в указанном по меньшей мере одном первом цилиндре в направлении подъема обрабатывающего сельскохозяйственную культуру компонента, причем давление определяет подъемное усилие, превышающее требуемое подъемное усилие, и первую систему прижимного давления для приложения прижимного давления в направлении опускания обрабатывающего сельскохозяйственную культуру компонента и приложения указанного давления на землю, а вторая гидравлическая система содержит вторую систему подъемного давления, выполненную с возможностью приложения давления к стороне поршня в указанном по меньшей мере одном втором цилиндре в направлении подъема обрабатывающего сельскохозяйственную культуру компонента, причем давление определяет подъемное усилие, превышающее требуемое подъемное усилие, и вторую систему прижимного давления для приложения прижимного давления в направлении опускания обрабатывающего сельскохозяйственную культуру компонента и приложения указанного давления на землю.
Устройство, изложенное в любом из определений, может быть выполнено так, что первая и вторая системы подъемного давления включают в себя общий аккумулятор так, что сгибание вниз второго участка рамы подает дополнительную текучую среду в цилиндр первой гидравлической системы для приложения дополнительного подъемного давления к первому участку рамы, и так, что сгибание вверх второго участка рамы извлекает текучую среду из цилиндра первой гидравлической системы для приложения уменьшенного подъемного давления к первому участку рамы.
Хотя устройство может использоваться на машинах множества различных типов, конструкция, в частности, предназначена для использования, когда первый участок рамы содержит центральный участок, прикрепленный к транспортному средству, а второй участок рамы содержит один из пары крыльевых участков, и когда транспортное средство содержит уборочный комбайн, а обрабатывающий сельскохозяйственную культуру компонент включает в себя режущий аппарат для срезания сельскохозяйственной культуры на корню.
В соответствии с дополнительным определением изобретения предложена машина для уборки сельскохозяйственной культуры, содержащая:
несущее транспортное средство для перемещения по земле;
обрабатывающий сельскохозяйственную культуру компонент, включающий в себя взаимодействующую с сельскохозяйственной культурой систему и по меньшей мере один взаимодействующий с землей компонент для обеспечения поддерживающего усилия от земли;
поддерживающее устройство для поддержания обрабатывающего сельскохозяйственную культуру компонента относительно транспортного средства для плавающего перемещения обрабатывающего сельскохозяйственную культуру компонента вверх и вниз так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента обеспечивается подъемным усилием от поддерживающего устройства, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом за счет давления на землю;
причем поддерживающее устройство содержит:
по меньшей мере один гидравлический плавающий цилиндр, имеющий поршень, выполненный с возможностью перемещения в цилиндре так, что перемещение поршня относительно цилиндра вызывает приложение указанного подъемного усилия к обрабатывающему сельскохозяйственную культуру компоненту;
гидравлическую систему, содержащую гидравлическую текучую среду под давлением для приложения давления к стороне поршня в указанном по меньшей мере одном цилиндре в направлении подъема обрабатывающего сельскохозяйственную культуру компонента;
причем гидравлическая система при работе выполнена с возможностью обеспечения давления, определяющего подъемное усилие, превышающее требуемое подъемное усилие;
и систему прижимного давления для приложения прижимного давления к обрабатывающему сельскохозяйственную культуру компоненту в направлении опускания обрабатывающего сельскохозяйственную культуру компонента и приложения указанного давления на землю;
в которой система прижимного давления включает в себя электронную систему управления для подачи сигнала управления для изменения прижимного давления.
Хотя в некоторых случаях гидравлическая система при работе выполнена с возможностью обеспечения давления, определяющего подъемное усилие, превышающее требуемое подъемное усилие, подъемное усилие также может быть меньше, в результате чего часть веса жатки будет поддерживаться землей, при условии, что этот вес меньше, чем конечное требуемое усилие на землю.
Обычно машина для уборки сельскохозяйственной культуры представляет собой уборочную жатку, которая устанавливается на уборочный комбайн, но многие другие машины для уборки сельскохозяйственных культур могут использовать систему, изложенную здесь. Взаимодействующая с землей система обычно представляет собой полозковый элемент, который движется над землей для удержания режущего аппарата максимально близко к земле, но могут быть использованы другие устройства, в которых режущий аппарат удерживается поднятым.
Предпочтительно электронная система управления работает на системе прижимного давления, а не на гидравлической системе, так что любые изменения давления в гидравлической системе вызваны перемещением системы, а не изменениями сигнала управления. То есть система прижимного давления не зависит от гидравлической системы, так что гидравлическое давление остается по существу неизменным, хотя изменения могут происходить из-за перемещения цилиндра, подающего текучую среду в цилиндр и из него. Обычно в гидравлическом контуре обеспечен аккумулятор для приема потока текучей среды. То есть давление из указанной гидравлической системы не изменяется в ответ на указанный сигнал датчика.
В некоторых случаях изменения давления выполняются с использованием сигнала датчика положения и сигнала датчика давления, но ТОЛЬКО для поддержания надлежащего давления в нижнем аккумуляторе для компенсации утечки, изменений температуры и т.д. То есть система не выполняет изменения этого давления, чтобы повлиять на изменения давления на землю на основе перемещения жатки.
Для работы электронной системы управления предпочтительно предусмотрен датчик, выполненный с возможностью подачи сигнала датчика в электронную систему управления в ответ на перемещение обрабатывающего сельскохозяйственную культуру компонента при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх и вниз, причем электронная система управления в ответ на сигнал датчика выполнена с возможностью временного изменения сигнала управления для временного изменения прижимного давления и в ответ на указанный сигнал датчика выполнена с возможностью последующего возврата к заданному значению прижимного давления. Предпочтительно электронная система управления в ответ на изменения указанного сигнала датчика выполнена с возможностью временного изменения сигнала управления для изменения прижимного усилия системы прижимного давления в ответ на обнаруженное перемещение обрабатывающего сельскохозяйственную культуру компонента.
Предпочтительно электронная система управления выполнена с возможностью изменения давления так, что подъемное усилие от поддерживающего устройства уменьшается для приложения увеличенного усилия на землю как при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх из промежуточного положения плавания, так и при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вниз из промежуточного положения плавания.
В дополнение, предпочтительно электронная система управления и указанный датчик в ответ на указанный сигнал выполнены с возможностью генерации значения, указывающего ускорение и/или скорость взаимодействующей с сельскохозяйственной культурой системы при указанном плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх и вниз, и изменения сигнала управления в ответ на значение ускорения и/или скорости.
В предпочтительном устройстве система прижимного давления выполнена с возможностью изменения давления в гидравлической системе прижимного давления, причем гидравлическая текучая среда из гидравлической системы прижимного давления подается в цилиндр с обратной стороны поршня для противодействия подъемному давлению от гидравлической системы.
В другом альтернативном варианте система прижимного давления содержит компонент, отдельный от цилиндра, выполненный с возможностью приложения прижимного усилия к подъемному звену в направлении противодействия усилию от поршня в цилиндре, создаваемому давлением от гидравлической системы. Это может быть другой цилиндр или газовый баллон, причем отдельный компонент выполнен с возможностью создания указанного прижимного усилия в ответ на давление текучей среды.
В соответствии с дополнительным определением изобретения предложена машина для уборки сельскохозяйственной культуры, содержащая:
несущее транспортное средство для перемещения по земле;
обрабатывающий сельскохозяйственную культуру компонент, включающий в себя взаимодействующую с сельскохозяйственной культурой систему и по меньшей мере один взаимодействующий с землей компонент для обеспечения поддерживающего усилия от земли;
поддерживающее устройство для поддержания обрабатывающего сельскохозяйственную культуру компонента так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента обеспечивается подъемным усилием от поддерживающего устройства, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом за счет давления на землю;
причем поддерживающее устройство выполнено с возможностью поддержания обрабатывающего сельскохозяйственную культуру компонента для плавающего перемещения вверх и вниз относительно промежуточного положения плавания обрабатывающего сельскохозяйственную культуру компонента;
причем поддерживающее устройство содержит:
по меньшей мере один гидравлический плавающий цилиндр;
гидравлическую систему, содержащую гидравлическую текучую среду под давлением;
электронную систему управления для подачи сигнала управления для изменения давления;
причем электронная система управления выполнена с возможностью изменения давления так, что подъемное усилие от поддерживающего устройства уменьшается как при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх из указанного промежуточного положения плавания, так и при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вниз из указанного промежуточного положения плавания.
Предпочтительно, в дополнение, электронная система управления и датчик в ответ на сигнал выполнены с возможностью генерации значения, указывающего ускорение и/или скорость взаимодействующей с сельскохозяйственной культурой системы при указанном плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх и вниз, и изменения сигнала управления в ответ на значение ускорения и/или скорости.
Промежуточное положение может быть ограничено точкой или небольшой зоной, но в некоторых случаях промежуточное положение включает в себя область с каждой стороны от точки, в которой подъемное усилие поддерживается постоянным.
В некоторых случаях темп уменьшения подъемного усилия с одной стороны от промежуточной точки отличается от темпа с другой стороны. То есть темп уменьшения подъемного усилия при перемещении обрабатывающего сельскохозяйственную культуру компонента вверх может быть больше, чем при перемещении обрабатывающего сельскохозяйственную культуру компонента вниз.
В некоторых случаях уменьшение подъемного усилия прямо или линейно пропорционально пройденному расстоянию. Однако для изменения подъемного усилия относительно расстояния, пройденного взаимодействующим с сельскохозяйственной культурой компонентом, могут быть использованы более сложные алгоритмы.
В частности, устройство, раскрытое здесь, может обеспечивать машину для уборки сельскохозяйственной культуры, содержащую:
несущее транспортное средство для перемещения по земле, на которой происходит уборка урожая;
обрабатывающий сельскохозяйственную культуру компонент, включающий в себя взаимодействующую с сельскохозяйственной культурой систему и по меньшей мере один взаимодействующий с землей компонент для обеспечения поддерживающего усилия от земли;
поддерживающее устройство для поддержания компонента для уборки сельскохозяйственной культуры относительно транспортного средства для плавающего перемещения компонента для уборки сельскохозяйственной культуры вверх и вниз так, что часть поддерживающего усилия обеспечивается поддерживающим устройством, а часть обеспечивается взаимодействующим с землей компонентом;
причем поддерживающее устройство включает в себя по меньшей мере один гидравлический плавающий цилиндр, выполненный так, что подача гидравлической текучей среды под гидравлическим давлением в указанный по меньшей мере один плавающий цилиндр вызывает приложение подъемного усилия к компоненту для уборки сельскохозяйственной культуры путем перемещения указанного по меньшей мере одного плавающего цилиндра, причем это подъемное усилие пропорционально указанному гидравлическому давлению;
причем указанный по меньшей мере один плавающий цилиндр содержит уплотнения цилиндра, по которым один компонент указанного по меньшей мере одного плавающего цилиндра скользит относительного другого компонента указанного по меньшей мере одного плавающего цилиндра;
источник гидравлической текучей среды для подачи гидравлической текучей среды в указанный по меньшей мере один плавающий цилиндр под давлением, превышающим указанное гидравлическое давление;
обратную линию для указанной гидравлической текучей среды;
клапанное устройство для управления потоком и давлением указанной гидравлической текучей среды из указанного источника в указанный по меньшей мере один плавающий цилиндр;
причем клапанное устройство соединено с указанным по меньшей мере одним плавающим цилиндром так, что поток текучей среды в указанный по меньшей мере один плавающий цилиндр и из него регулируется клапанным устройством при указанном гидравлическом давлении, регулируемом клапанным устройством;
электронную систему управления для подачи сигнала управления клапанному компоненту для изменения указанного заданного давления в зависимости от значения сигнала;
причем указанное клапанное устройство содержит:
первое соединение с указанным источником;
второе соединение с указанным по меньшей мере одним плавающим цилиндром,
третье соединение для выпуска указанной гидравлической текучей среды в указанную обратную линию;
и клапанный компонент, выполненный с возможностью управления потоком гидравлической текучей среды из указанного источника в указанный по меньшей мере один плавающий цилиндр и потоком гидравлической текучей среды из указанного по меньшей мере одного плавающего цилиндра в указанную обратную линию для поддержания указанного гидравлического давления в указанном по меньшей мере одном плавающем цилиндре на заданном значении, установленном в зависимости от указанного сигнала управления от указанной системы управления;
и устройство, вызывающее относительное возвратно-поступательное перемещение в режиме переменных волн между указанным одним компонентом указанного по меньшей мере одного плавающего цилиндра и указанным другим компонентом указанного по меньшей мере одного плавающего цилиндра.
Задача заключается в том, чтобы режим переменных волн предпочтительно имел амплитуду, достаточную для предотвращения статического фрикционного взаимодействия уплотнений с компонентом, для поддержания перемещения между компонентами на указанных уплотнениях цилиндра с целью снижения статического трения. Амплитуда, необходимая для этого, может изменяться в зависимости от давления в цилиндре и веса жатки и может быть легко определена специалистом в данной области техники. Рассматриваемое уплотнение или уплотнения обычно представляют собой уплотнения на стенке цилиндра на головке поршня и/или на головке цилиндра на поршневом штоке. В некоторых случаях цилиндры могут использоваться при отсутствии уплотнения на штоке. Разумеется, также могут быть обеспечены другие конструкции. Действие, при котором уплотнение освобождается от другого компонента, может требовать фактического перемещения уплотнения вдоль поверхности или может требовать только сгибания этого уплотнения так, что его поверхность выходит из контакта с неподвижным участком поверхности компонента. В любом случае может быть определено, что величина усилия, необходимого для перемещения компонентов в ответ на сигнал управления, может снижаться до величины порядка 10% от нормального значения, когда переменный сигнал не применяется.
Предпочтительно режим переменных волн имеет частоту в диапазоне от 5 до 15 Гц.
Предпочтительно относительное возвратно-поступательное перемещение обеспечивается сигналом в режиме переменных волн, подаваемым указанной электронной системой управления указанному клапанному устройству для изменения указанного заданного давления в зависимости от значения сигнала. Однако перемещение может быть обеспечено изменениями давления текучей среды, подаваемой в цилиндр, создаваемыми компонентом, отличным от клапана. Могут быть обеспечены различные источники для изменений давления, включая механические компоненты. Также для обеспечения переменного давления текучей среды могут быть использованы другие компоненты на жатке, которые создают давление текучей среды.
Режим, как правило, может быть синусоидальным, но также могут быть использованы другие формы.
Для предотвращения вмешательства в работу цилиндра для управления плавающим перемещением, предпочтительно режим переменных волн имеет частоту в диапазоне XXX. Если клапан относится к типу, который использует золотник для переключения между входным и выходным потоками, эта частота значительно отличается от типичного диапазона частоты перемещения золотника.
Поскольку режим переменных волн используется в ситуации, когда жатка может оставаться неподвижной в течение некоторого периода времени, например, во время плавающего режима при отсутствии каких-либо изменений рельефа земли, режим переменных волн может прекращаться, когда цилиндр используется в состоянии подъема или опускания, во время которого цилиндр, разумеется, постоянно перемещается. Это исключает необходимость вычислений для получения формы волны на основе систем определения, когда форма волны не требуется.
Кроме того, устройство, раскрытое здесь, может обеспечивать машину для уборки сельскохозяйственной культуры, содержащую:
несущее транспортное средство для перемещения по земле;
взаимодействующий с сельскохозяйственной культурой компонент, включающий в себя систему срезания сельскохозяйственной культуры и по меньшей мере один взаимодействующий с землей компонент для обеспечения поддерживающего усилия от земли;
поддерживающее устройство для поддержания компонента для уборки сельскохозяйственной культуры относительно транспортного средства для плавающего перемещения компонента для уборки сельскохозяйственной культуры вверх и вниз так, что заданная часть поддерживающего усилия обеспечивается поддерживающим устройством, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом;
причем поддерживающее устройство включает в себя по меньшей мере один гидравлический плавающий цилиндр, выполненный так, что подача гидравлической текучей среды под гидравлическим давлением в указанный по меньшей мере один плавающий цилиндр вызывает приложение подъемного усилия к компоненту для уборки сельскохозяйственной культуры путем перемещения указанного по меньшей мере одного плавающего цилиндра, причем это подъемное усилие пропорционально указанному гидравлическому давлению;
источник гидравлической текучей среды для подачи гидравлической текучей среды в указанный по меньшей мере один плавающий цилиндр под давлением, превышающим указанное гидравлическое давление;
обратную линию для указанной гидравлической текучей среды;
клапанное устройство для управления потоком и давлением указанной гидравлической текучей среды из указанного источника в указанный по меньшей мере один плавающий цилиндр;
причем клапанное устройство соединено с указанным по меньшей мере одним плавающим цилиндром так, что поток текучей среды в указанный по меньшей мере один плавающий цилиндр и из него регулируется клапанным устройством при указанном гидравлическом давлении, регулируемом клапанным устройством;
электронную систему управления для подачи сигнала управления клапанному компоненту для изменения указанного заданного давления в зависимости от значения сигнала;
причем указанное клапанное устройство содержит:
первое соединение с указанным источником;
второе соединение с указанным по меньшей мере одним плавающим цилиндром,
третье соединение для выпуска указанной гидравлической текучей среды в указанную обратную линию;
и клапанный компонент, выполненный с возможностью управления потоком гидравлической текучей среды из указанного источника в указанный по меньшей мере один плавающий цилиндр и потоком гидравлической текучей среды из указанного по меньшей мере одного плавающего цилиндра в указанную обратную линию для поддержания указанного гидравлического давления в указанном по меньшей мере одном плавающем цилиндре на заданном значении, установленном в зависимости от указанного сигнала управления от указанной системы управления;
датчик, выполненный с возможностью подачи сигнала датчика в указанную электронную систему управления в ответ на перемещение компонента для уборки сельскохозяйственной культуры при указанном плавающем перемещении компонента для уборки сельскохозяйственной культуры вверх и вниз;
причем указанная электронная система управления выполнена с возможностью обеспечения заданного значения указанного сигнала управления для обеспечения указанного подъемного усилия на заданном значении для поддержания указанной заданной части указанного поддерживающего усилия;
причем указанная электронная система управления в ответ на указанный сигнал датчика выполнена с возможностью временного изменения сигнала управления для временного изменения подъемного усилия.
Предпочтительно электронная система управления после временного изменения в ответ на указанный сигнал датчика выполнена с возможностью возврата к заданному значению. Таким образом, предпочтительно электронная система управления в ответ на изменения указанного сигнала датчика выполнена с возможностью временного изменения сигнала управления для изменения подъемного усилия и, следовательно, изменения ответа гидравлического плавающего цилиндра в ответ на обнаруженное перемещение компонента для уборки сельскохозяйственной культуры.
Например, электронная система управления при обнаружении завершения ускорения при указанном плавающем перемещении вверх выполнена с возможностью изменения сигнала управления для уменьшения подъемного усилия для демпфирования перемещения вверх.
Таким образом, система управления может использоваться для динамического увеличения или уменьшения подъемного усилия во время подъема жатки из-за контакта с землей или другим препятствием для улучшения ответа на усилия от контакта с землей. В дополнение после устранения контакта с землей, что останавливает любое дальнейшее ускорение, подъемное усилие может быть значительно уменьшено, так что вес жатки снова действует в направлении вниз, таким образом демпфируя любое дальнейшее плавающее перемещение вверх. Это исключает или снижает вероятность ситуации, когда жатка поднимается за счет усилия на землю или взаимодействия с препятствием и затем остается поднятой в течение длительного периода времени, что препятствует срезанию сельскохозяйственной культуры, пока жатка остается поднятой.
Следует понимать, что динамическое управление подъемными усилиями в зависимости от перемещения жатки может использоваться как в режиме плавания по земле, так и при срезании на заданной высоте подъема. В последнем сценарии плавающее перемещение обычно обеспечивается для того, чтобы жатка могла «проплыть» над любыми препятствиями, даже если основное срезающее действие выполняется в приподнятом положении над землей. Также в некоторых случаях, например, в случае канав и насыпей, высота земли может достаточно существенно изменяться, так что жатка взаимодействует с землей, даже если номинально она установлена на высоте над землей. В связи с этим во всех таких случаях динамическое управление подъемными усилиями увеличивает доступное усилие для подъема жатки над изменением высоты земли или над препятствием. В то же время подъемное перемещение останавливается или уменьшается при преодолении препятствия для сокращения времени, в течение которого жатка остается поднятой выше требуемого условия.
В ситуации, когда жатка находится на приподнятой высоте срезания, направленные вниз усилия также могут динамически регулироваться для наиболее эффективного возврата жатки на требуемую высоту срезания. Таким образом, направленные вниз усилия могут увеличиваться в начале перемещения вниз и могут уменьшаться к концу перемещения вниз для более плавного возврата жатки на требуемую высоту.
Для обеспечения наилучшего демпфирующего усилия предпочтительно электронная система управления выполнена с возможностью изменения сигнала управления для уменьшения подъемного усилия до значения, меньшего, чем указанное заданное значение. Следовательно, жатка будет ускоряться в направлении вниз с учетом уменьшенного подъемного усилия до тех пор, пока жатка не достигнет земли, после чего ускорение вниз прекращается, и система управления снова применяет заданное значение.
Симметричным образом, предпочтительно электронная система управления при обнаружении ускорения при плавающем перемещении вниз выполнена с возможностью изменения сигнала управления для уменьшения подъемного усилия для содействия ускорению при указанном плавающем перемещении вниз. То есть, когда жатка движется по земле без необходимости плавающего перемещения, и когда углубление в земле требует, чтобы жатка опустилась до нижнего уровня земли, подъемное усилие может быстро уменьшаться для содействия перемещению жатки вниз с использованием веса жатки. Также электронная система управления при обнаружении завершения указанного ускорения при указанном плавающем перемещении вниз, то есть при взаимодействии жатки с землей, может быть выполнена с возможностью изменения сигнала управления для увеличения подъемного усилия для демпфирования указанного перемещения вниз.
Предпочтительно датчик содержит датчик положения для генерации сигнала положения, указывающего положение цилиндра при перемещении, и электронная система управления выполнена с возможностью вычисления скорости и ускорения компонента для уборки сельскохозяйственной культуры на основе сигнала положения. Однако могут быть обеспечены другие устройства датчиков, включая, например, конкретное устройство определения ускорения и конкретное устройство определения относительного перемещения, все их которых сейчас легко доступны в эффективной и недорогой форме за счет их широкого применения в других областях.
Предпочтительно электронная система управления выполнена с возможностью достижения полностью регулируемой жесткости пружины для динамики плавающей системы.
Предпочтительно электронная система управления выполнена с возможностью достижения полностью регулируемого демпфирования для динамики плавающей системы.
В настоящем изобретении электронная система управления может быть выполнена с возможностью достижения полностью регулируемой динамики плавающей системы на основе рабочего состояния орудия, включая без ограничения высоту орудия, скорость относительно земли и изменения рельефа местности (угол наклона и т.д.).
В дополнение, предпочтительно электронная система управления выполнена с возможностью обеспечения оператору выбора из заданной динамики плавающей системы, которая может быть адаптирована к различным полевым условиям и орудиям.
Для использования преимуществ гидравлической плавающей системы устройство, описанное здесь, обеспечивает систему, которая снижает эффект трения в плавающей системе для обеспечения превосходной способности огибания рельефа земли. Эта система может быть применена на виндроуэрах и переходниках комбайна или на любом другом сельскохозяйственном орудии, которое подвешено на держателе плавающим образом (сеноуборочные инструменты, грабли, подборщики и т.д.). Система может использоваться при плавающем подвешивании жатки, которая срезает урожай на земле, а также жатки, которая срезает урожай на высоте над уровнем земли. Хотя система, в частности, применима для плавающего подвешивания основной жатки на передней части трактора, такая же конструкция также может быть использована для плавающего подвешивания крыльев на гибкой полотенной жатке, относящейся к типу, описанному в патенте США № 5005343 (Patterson), выданном 9 апреля 1991 года, раскрытие которого включено сюда путем ссылки.
Система, описанная здесь, содержит один или более плавающих цилиндров, которые используются для подвешивания жатки на держателе. На каждом цилиндре (или вблизи него) обеспечен пропорциональный клапан снижения/сброса давления (PPRR) с электронным управлением, который регулирует давление в этом цилиндре. Клапан находится под управлением электронного контроллера, который принимает давление (или усилие) и обратную связь по положению/скорости/ускорению от плавающей системы и изменяет давление в цилиндре для обеспечения заданных характеристик плавающего перемещения. Гидравлическое давление и поток подаются в клапан из источника, который может представлять собой аккумулятор, заряженный до уровня, превышающего максимальное давление, требуемое плавающей системой, контур привода, который имеет минимальное давление, превышающее максимальное давление, требуемое плавающей системой, или какой-либо другой гидравлический источник. Однако давление от клапана, подается в цилиндр непосредственно и немедленно без наличия в контуре аккумулятора, который, в противном случае, ослабил бы действие давления на цилиндр.
То есть, хотя большинство систем имеют аккумулятор, гидравлически и непосредственно соединенный с цилиндром в режиме плавания, настоящее устройство использует PPRR-клапан с электронным управлением непосредственно между источником давления и плавающим цилиндром. Это позволяет системе очень точно и мгновенно регулировать давление в плавающем цилиндре, так что она может регулировать давление на основе мгновенных изменений плавающей системы. Аккумуляторные системы гораздо менее точны/чувствительны, поскольку изменение гидравлического давления по команде делится между перемещением цилиндра и зарядкой аккумулятора.
Каждый плавающий цилиндр имеет соответствующий датчик положения, датчик давления и клапан снижения/сброса давления. Клапан соединен с источником давления. Контроллер принимает входные сигналы от датчиков и независимо управляет каждым PPRR-клапаном на основе эти входных сигналов. Сигнал от датчика положения может быть непосредственно связан с цилиндром или может быть связан с каким-либо другим плавающим звеном (звеньями), который указывает положение жатки. Этот сигнал может использоваться для вычисления в электронной системе управления скорости и ускорения жатки, а также положения жатки в диапазоне плавающего перемещения. PPRR-клапаны непосредственно управляют цилиндрами без аккумулятора между клапаном и цилиндром. Это является наиболее простым представлением системы.
В другом улучшении изобретения добавлены аккумулятор, датчик давления и регулировочный клапан для улучшения ответа плавающей системы. Контроллер принимает входной сигнал от датчика давления и управляет клапаном для поддержания диапазона давления в аккумуляторе, который несколько выше (например, на 200-250 фунтов на квадратный дюйм (1,38-1,72 МПа)), чем максимальное давление, требуемое на датчиках давления. Это максимальное давление зависит от веса жатки и может быть определено путем калибровки с использованием традиционных способов, в которых подъемное усилие постепенно увеличивают до тех пор, пока жатка немного не приподнимется от земли, и с помощью добавления заданного значения к этому определенному значению или с помощью сохраненных значений на основе идентификатора жатки для размера и типа каждой жатки.
При использовании этого способа аккумулятор может подавать мгновенный поток в PRR-клапаны, вероятно, быстрее, чем чувствительный к нагрузке насос может отвечать на запрос потока.
Следует отметить, что плавающая система такого типа также может использоваться для плавающего подвешивания крыльев на гибкой жатке путем использования цилиндра для ответа на вес крыла вблизи шарнира крыла и управления этим цилиндром с помощью предложенной системы.
В дополнение к вышеизложенному, алгоритмы электронного управления включают в себя способ управления выходным сигналом для пропорционального PRR-клапана, управляющего давлением цилиндра, для более эффективного огибания жаткой рельефа земли.
Часть используемого электронного управления включает в себя подачу колебательного сигнала управления PPRR-клапану, который подает давление плавания в цилиндр. Это создает переменное давление в цилиндре, которое вызывает легкие колебания цилиндра. Таким образом, цилиндр всегда находится в движении, и это снижает эффект трения на уплотнениях цилиндра. Колебание давление также помогает компенсировать гистерезис или зону нечувствительности пропорционального клапана снижения/сброса давления. Клапан такого типа включает в себя золотник, совершающий колебательные перемещения взад и вперед между положениями впуска и выпуска текучей среды для поддержания давления на значении, определенном сигналом на соленоид клапана, причем положение золотника регулируется пилотным соединением выходной линией давления. Обычно пилотное соединение является внутренним по отношению к самому клапану и не требует канала в выходную линию или управляемый цилиндр. Клапан такого типа имеет зону нечувствительности между тем, где он сбрасывает давление, и тем, где он снижает давление.
Дополнительным признаком системы является то, что система обеспечивает программируемую жесткости пружины или затухание плавающего перемещения, которые могут быть адаптированы к множеству требований к плавающему перемещению, например, высоте срезания, скорости относительно земли, состояниям почвы и т.д. Жесткость пружины может мгновенно и постоянно регулироваться на основе входного сигнала датчика от плавающей системы, оператора или других систем, например, радиолокационного, сонарного или лазерного обнаружения препятствий и рельефа земли.
Дополнительный признак системы включает в себя возможность обеспечения регулируемого демпфирования плавающей системы также на основе требований к плавающему перемещению или ситуации.
Другой признак включает увеличение или уменьшение давления в плавающем цилиндре на основе положения плавания и направления перемещения. Например, это позволяет уменьшать давление плавания, если обнаружено, что жатка перемещается вниз (например, при срезании урожая в канаве), так что жатка будет огибать рельеф земли при проседании уровня земли. Подобная регулировка может осуществляться для увеличения или уменьшения давления плавания, если обнаружено, что жатка перемещается вверх по насыпи.
Другой признак включает в себя увеличение или уменьшение давления в плавающем цилиндре на основе скорости и/или ускорения жатки.
Другие признаки изобретения обеспечивают следующее:
a) Колебание давления плавания для снижения эффектов гистерезиса пропорционального PRR-клапана, а также трения (механического) в системе и на уплотнениях цилиндра.
b) Обнаружение изменения положения плавания/направления последнего перемещения/скорости (это может осуществляться датчиками, измеряющими длину цилиндра, положение плавающего звена и т.д.) и последующее уменьшение/увеличение давления плавания для более быстрого опускания или подъема жатки.
c) Различные настройки характеристик плавающего перемещения на основе состояния земли, скорости относительно земли, сельскохозяйственной культуры, срезания на/над землей.
d) Запрограммированная жесткость пружины.
Обратная связь от датчика давления может не требоваться, поскольку система может использовать только выходной сигнал в PWM-клапан. Например, выходное давление клапана технически может быть соотнесено с электронным вводом клапана, так что при подаче клапану известного сигнала можно знать, на какое выходное давление установлен клапан. Однако обычно датчик давления может быть необходим из-за изменений характеристик клапана вследствие изменений температуры, износа, вибрации и т.д., которые могут быть слишком велики для практической реализации.
Сигнал от датчика давления может использоваться в качестве обратной связи для подтверждения того, что клапан действительно выдает требуемое выходное давление, заданное сигналом управления. Таким образом, может быть обеспечено устройство, в котором обратная связь используется лишь периодически для проверки выходного значения, так что сигнал от датчика давления не используется системой управления непосредственным и многократным образом. То есть периодически выходное давление может проверяться, и, если обнаруживается, что измеренное выходное давление не соответствуют предполагаемому значению, заданному устройством управления, при последующих вычислениях системы управления используется корректирующий коэффициент.
В качестве альтернативы, устройство может работать тогда, когда система знает положение жатки в диапазоне плавающего перемещения (от датчиков положения) и может использовать это знание для изменения давления плавания для обнаружения оптимального значения, которое размещает жатку с минимальным усилием на землю на основе вычислений скорости и ускорения.
Хотя перемещение в режиме переменных волн предпочтительно обеспечивается формой волны сигнала от устройства управления, также может быть использован альтернативный способ, в котором обеспечивается механический вариант подмешивания, например, устройство поршня/кривошипа, которое вызывает колебания давления плавания. Например, система может использовать пульсацию контура привода ножа в режущем аппарате.
Могут быть использованы различные способы обеспечения давления плавания, включая давление в контуре привода, давление в контуре привода с аккумулятором и обратными клапанами, чувствительный к нагрузке насос с обратной связью.
Калибровку обычно выполняют традиционным способом, в котором систему приводят в действие для увеличения давления плавания до тех пор, пока жатка слегка не приподнимется от земли, а затем используют систему для увеличения/уменьшения давления плавания для обеспечения оптимального давления при контакте с землей. Разумеется, могут быть использованы другие способы калибровки, многие из которых известны специалистам в данной области техники.
Предпочтительно в отношении вариантов выполнения или аспектов, описанных выше, следует отметить, что клапанное устройство имеет характеристику, заключающуюся в том, что клапанное устройство действует для поддержания давления гидравлической текучей среды в камере на постоянном значении, причем это значение зависит от сигнала управления, подаваемого на клапанное устройство, во время изменений объема камеры, вызванных перемещением поршня.
Предпочтительно в отношении вариантов выполнения или аспектов, описанных выше, следует отметить, что электронная система управления для выполнения указанных временных изменений запрограммирована с возможностью ответа на сигнал перемещения, а не на изменения давления в камере, которые вызваны перемещением поршня. Такая система не практична для клапана используемого типа, так как клапан действует для поддержания постоянного давления в цилиндре до тех пор, пока не будет вычислен сигнал управления, требующий изменения давления. Таким образом, отсутствует изменение давление, которое может быть обнаружено.
Хотя клапан, таким образом, предназначен и работает для поддержания постоянного давления, несмотря на перемещение поршня в цилиндре, изменяющее объем камеры, система может включать в себя датчик обратной связи для гарантии того, что заданное давление поддерживается без недопустимого отклонения. Однако датчик обратной связи не используется при вычислении требуемого давления и, следовательно, требуемого сигнала управления, соответствующего этому требуемому давлению.
Как более подробно объяснено ниже, камера цилиндра, в которую клапанное устройство подает регулируемое давление, может находиться со стороны подъема поршня, так что увеличения давления действуют для увеличения подъемного усилия, или более предпочтительно регулируемое давление подается клапанным устройством в таком направлении, что увеличения давления действуют для уменьшения подъемного усилия. Обычно оно прикладывается со стороны прижимного усилия поршня для уравновешивания в общем постоянного подъемного усилия от аккумулятора, прикладываемого со стороны подъема поршня.
Другим признаком изобретения является то, что, когда электронная система управления работает на системе прижимного давления, она учитывает изменения давления в системе подъемного давления, вызванные перемещением поршня.
В соответствии с другим аспектом изобретения обеспечен уборочный комбайн, содержащий:
несущее транспортное средство для перемещения по земле, причем транспортное средство имеет наклонную камеру для приема убранной сельскохозяйственной культуры;
жатку, включающую в себя систему срезания сельскохозяйственной культуры и по меньшей мере один взаимодействующий с землей компонент для обеспечения поддерживающего усилия от земли;
поддерживающее устройство, расположенное между наклонной камерой и жаткой для поддержания жатки так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента обеспечивается подъемным усилием от поддерживающего устройства, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом за счет давления на землю;
причем поддерживающее устройство выполнено с возможностью поддержания обрабатывающего сельскохозяйственную культуру компонента для плавающего перемещения вверх и вниз относительно промежуточного положения плавания обрабатывающего сельскохозяйственную культуру компонента;
причем поддерживающее устройство содержит по меньшей мере один гидравлический плавающий цилиндр, гидравлическую систему, содержащую гидравлическую текучую среду под давлением, и электронную систему управления для подачи сигнала управления для изменения давления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее будут описаны варианты осуществления изобретения в сочетании с сопровождающими чертежами, на которых:
Фигура 1 представляет собой вид сбоку транспортного средства, имеющего жатку и плавающую систему жатки в соответствии с настоящим изобретением. В этом варианте выполнения транспортное средство представляет собой виндроуэр.
Фигура 1A представляет собой вид сбоку транспортного средства, имеющего жатку и плавающую систему жатки в соответствии с настоящим изобретением. В этом варианте выполнения транспортное средство представляет собой уборочный комбайн.
Фигура 2 представляет собой схематическую иллюстрацию простого устройства системы управления в соответствии с настоящим изобретением для использования в жатке, показанной на Фигуре 1.
Фигура 3 представляет собой схематическую иллюстрацию второго устройства системы управления в соответствии с настоящим изобретением для использования в жатке, показанной на Фигуре 1, которое включает в себя аккумулятор как часть источника текучей среды для обеспечения достаточного и немедленного потока текучей среды для удовлетворения PPRR-клапанов.
Фигура 4 представляет собой схематическую иллюстрацию третьего устройства системы управления в соответствии с настоящим изобретением для использования в жатке, показанной на Фигуре 1, выполненного с возможностью захвата энергии плавающего перемещения жатки.
Фигура 5 представляет собой блок-схему, показывающую работу системы.
Фигура 6 представляет собой график, показывающий работу системы для изменения усилия на землю в ответ на перемещение жатки.
Фигура 7 представляет собой схематическую иллюстрацию системы, подобной системе, показанной на Фигуре 4, в которой подъемное усилие, превышающее подъемное усилие, требуемое для подъема жатки, обеспечивается гидравлическим цилиндром, и ему противодействует второй цилиндр или другое устройство под давлением, например, газовый баллон, причем давление второго цилиндра регулируется клапанами.
Фигура 8 представляет собой схематическую иллюстрацию системы, подобной системе, показанной на Фигурах 4 и 7, в которой подъемное усилие, превышающее подъемное усилие, требуемое для подъема жатки, обеспечивается гидравлическим цилиндром, и ему противодействует механическое пружинное устройство, причем усилие пружины, создаваемое пружиной, регулируется механической системой под управлением контроллера.
Фигура 9 представляет собой схематическую иллюстрацию первого варианта выполнения системы подвешивания в соответствии с изобретением для машины, которая включает в себя центральный или первый участок и крыльевой или второй участок, который может поворачиваться относительно центрального участка, и система включает в себя первый цилиндр для обеспечения плавающего перемещения первого участка относительно несущего транспортного средства и плавающего перемещения второго участка относительно первого участка.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фигура 1 иллюстрирует настоящее изобретение, используемое в отношении самоходного виндроуэра 100, однако следует понимать, что принципы настоящего изобретения не ограничиваются самоходным виндроуэром или каким-либо конкретным типом уборочной машины, имеющей жатку. Фигура иллюстрирует виндроуэр 100, который содержит трактор 102 и жатку 104. Жатка 104 шарнирно прикреплена к переднему концу рамы или шасси 106 виндроуэра 100, так что она может перемещаться вверх и вниз относительно шасси 106.
Такое крепление жатки 104 к раме 106 достигается за счет пары нижних рычагов 108 (показан только левый, правый находится в том же положении и в зеркальной конфигурации с правой стороны транспортного средства), шарнирно соединенных на одном конце с рамой 106, а на другом конце с жаткой 104, а также за счет центрального верхнего звена 110.
Звено 110 может принимать форму одиночного или двойного гидравлического цилиндра 112, выдвижение и втягивание которого регулируется оператором для удаленного управления углом режущего аппарата 114 на нижней передней части жатки 104.
Также показан одиночный подъемный/плавающий цилиндр 116, соединяющий нижний рычаг 108 с рамой 106. Цилиндр 116 поддерживает каждую сторону жатки, т.е. каждая сторона жатки поддерживается своим собственным подъемным/плавающим цилиндром 116. Также показан только левый подъемный/плавающий цилиндр 116. Правый подъемный/плавающий цилиндр 118 сконструирован, выполнен и расположен идентично левому подъемному/плавающему цилиндру 116 и идентично соединен с жаткой и рамой, но выполнен в зеркальной конфигурации относительно левой стороны транспортного средства.
На Фигуре 1A показана такая же конструкция, применяемая в отношении уборочного комбайна, где трактор комбайна обозначен ссылочной позицией 300 и включает в себя наклонную камеру 301, которая может подниматься и опускаться так, что передний конец перемещается вверх и вниз под управлением электроники комбайна и датчика высоты, который определяет положение жатки 104 относительно наклонной камеры. К наклонной камере прикреплена основная рама 303 для перемещения вместе с ней. Рама 304 жатки поддерживается на раме 303 с помощью плавающих цилиндров 116, как описано здесь. Таким образом, жатка может совершать плавающее перемещение вверх и вниз и может наклоняться вбок на двух цилиндрах 116, каждый из которых расположен с соответствующей стороны наклонной камеры. Для полноты следует отметить, что жатка представляет собой полотенную жатку с боковыми полотенными транспортерами 305 и подающим полотенным транспортером 306, расположенными позади режущего аппарата 128 и взаимодействующего с землей полозка 114.
В обоих вариантах выполнения предусмотрен датчик 120 положения в подходящем месте, который может находиться непосредственно на цилиндре, или который на Фигуре 1 соединен с рамой 106 и коленчатым рычагом 122 и находится между ними, и выполнен с возможностью определения положения цилиндра. Это может быть выполнено на цилиндре или в другом месте, например, в относительном положении коленчатого рычага 122 относительно рамы 106. Показанный датчик положения представляет собой потенциометр, обеспечивающий сигнал, который изменяется при перемещении жатки вверх и вниз (вертикальная составляющая перемещения) относительно рамы 106. В этом смысле датчик положения также является датчиком высоты, который определяет высоту жатки относительно трактора. Конкретное расположение датчика 120 положения относительно рамы 106 и относительно коленчатого рычага 122 может изменяться в зависимости от доступного пространства, требуемого типа преобразователя и разрешения датчика. Следует отметить, что в этом варианте выполнения конструкция соединения между цилиндром 116 и подъемными рычагами 108 в виде коленчатого рычага действует так, что подъемное усилие, обеспечиваемое подъемными рычагами 108, не является прямо пропорциональным подъемному усилию от цилиндра из-за изменений выигрыша в величине прикладываемого усилия при перемещении. Зависимость между подъемным усилием от цилиндра и фактическим подъемным усилием от рычагов на жатке должна учитываться при вычислении требуемого подъемного усилия от цилиндра и, следовательно, давления, которое должно быть приложено к цилиндру, как более подробно рассмотрено ниже.
Таким образом, изобретение обеспечивает машину для уборки сельскохозяйственной культуры, как правило, уборочную машину для сельскохозяйственной культуры, содержащую несущее транспортное средство 102 для перемещения по земле, на которой происходит уборка урожая, и обрабатывающий сельскохозяйственную культуру компонент, как правило, уборочную жатку 104, включающий в себя взаимодействующую с сельскохозяйственной культурой систему 114 и по меньшей мере один взаимодействующий с землей компонент или полозковую плиту 128 для обеспечения поддерживающего усилия от земли. Поддерживающее устройство 110, 106, 116 и 108 служит для поддержания жатки для уборки сельскохозяйственной культуры относительно транспортного средства для плавающего перемещения жатки для уборки сельскохозяйственной культуры вверх и вниз так, что часть поддерживающего усилия обеспечивается поддерживающим устройством, а часть обеспечивается взаимодействующим с землей компонентом 128.
Поддерживающее устройство включает в себя по меньшей мере один, а обычно два гидравлических плавающих цилиндра 116 и 117, расположенных таким образом, что подача гидравлической текучей среды под гидравлическим давлением в плавающие цилиндры 116 и 117 обеспечивает приложение подъемного усилия к жатке для уборки сельскохозяйственной культуры путем перемещения плавающего цилиндра, причем подъемное усилие пропорционально гидравлическому давлению, подаваемому в цилиндр.
Плавающие цилиндры включают в себя уплотнения 116A цилиндра, через которые поршневой компонент скользит относительно цилиндрического компонента плавающего цилиндра. Контур 10 подачи давления в цилиндры включает в себя источник 12 гидравлической текучей среды для подачи гидравлической текучей среды в плавающий цилиндр под давлением, превышающим требуемое гидравлическое давление. Источник 12 включает в себя насос 16 и слив 14, обеспечивающий обратную линию для гидравлической текучей среды.
Контур включает в себя два отдельных участка для подачи текучей среды под давлением в соответствующие цилиндры 116 и 117, каждый из которых включает в себя соответствующее клапанное устройство 18, 20 для регулировки потока и давления гидравлической текучей среды из источника в соответствующие цилиндры.
Как объяснено выше, клапаны относятся к клапанам типа PPRR, которые включают в себя золотник 21, который может скользить взад и вперед внутри клапана для соединения впускного и выпускного отверстий 22, 23 с линией 24 до соответствующего цилиндра. Золотник приводится в движение соленоидом 25 для размещения золотника в требуемом положении для создания требуемого давления в зависимости от сигнала на соленоид, обеспечиваемого контроллером 28 на линии 29 управления. Золотник также управляется пилотным давлением на линиях 30 и 31, соответственно соединенных с впуском и выпуском клапана. Такие клапаны поставляются на рынок множеством поставщиков и известны как пропорциональные клапаны снижения/сброса давления. Они служат для поддержания давления в цилиндре, когда оно подается по линии 24, на заданном значении, установленном сигналом на линии 29 от системы управления, путем многократной подачи и выпуска текучей среды относительно цилиндра через отверстия 22 и 23.
Сигнал управления для клапанов генерируется и регулируется электронной системой управления для изменения заданного давления в соответствующем цилиндре в зависимости от значения подаваемого сигнала.
Таким образом, клапанное устройство включает в себя первое соединение 33 с источником 12 и второе соединение 34 с обратной линией вместе с выпуском 24 в цилиндр.
Клапанный компонент служит для управления потоком гидравлической текучей среды от источника в плавающий цилиндр и потоком гидравлической текучей среды из плавающего цилиндра в обратную линию для поддержания гидравлического давления в плавающем цилиндре на заданном значении, устанавливаемом в зависимости от сигнала управления от системы управления.
Система 28 управления включает в себя подкомпонент 35, который служит для генерации переменного сигнала для обеспечения устройства, вызывающего относительное возвратно-поступательное перемещение в режиме переменных волн между поршневым компонентом плавающего цилиндра и цилиндрическим компонентом плавающего цилиндра, чтобы поддерживать перемещение между компонентами на уплотнениях цилиндра для уменьшения эффекта статического трения.
То есть относительное возвратно-поступательное перемещение обеспечивается сигналом в режиме переменных волн, подаваемым электронной системой управления клапанному устройству для изменения заданного давления в зависимости от значения сигнала в режиме переменных волн.
Подкомпонент 35 управляется системой 28 управления так, что режим переменных волн применяется только тогда, когда цилиндр находится в режиме плавания, и не применяется, когда цилиндр используется в состоянии подъема или опускания.
Контур дополнительно включает в себя датчики 40 и 41 давления, которые определяют давление в линиях подачи текучей среды в цилиндры для обеспечения сигнала, который передается в систему 28 управления. Поскольку клапаны выполнены с возможностью обеспечения выходного давления в ответ на подаваемый сигнал управления, измерение выходного давления теоретически не требуется. Однако с учетом температуры и других изменений, которые могут происходить, желательно проверять выходное давления, чтобы убедиться, что оно не отклоняется с течением времени и поддерживает на требуемом значении, которое определено сигналом управления. Проверка обратной связи, обеспечиваемая датчиками давления, может выполняться периодически, и не является частью работы системы управления для генерации выходных сигналов.
Датчики 120 и 121 положения, которые определяют положение цилиндров, обеспечивают сигнал, который подается обратно в систему 28 управления. Система может работать с использованием только входного сигнала от датчиков положения, поскольку система 28 управления может вычислять на основе изменений сигнала от датчиков положения как скорость, так и ускорение цилиндра и, следовательно, жатки. Подходящий алгоритм выполнения таких вычислений, разумеется, хорошо известен специалистам в данной области техники. Однако в дополнение к датчикам положения или в качестве альтернативы система может включать в себя акселерометр 42, установленный на жатке в одном или более подходящих местах для обеспечения выходного сигнала, указывающего относительное перемещение жатки и ускорение жатки.
Контур может дополнительно включать в себя ввод 45 оператора, который позволяет оператору вводить различные параметры при необходимости для управления системой 28 управления. Система управления также включает в себя входные линии, реагирующие на различные параметры работающей жатки, включающие в себя, например, индикатор 46 скорости относительно земли и индикатор 47 состояния сельскохозяйственной культуры. Они показаны лишь схематически, поскольку специалисты в данной области техники могут определить подходящие входные параметры. Может быть обеспечена дополнительная входная линия от системы 48 прогнозирования, которая может использовать датчики высоты земли и высоты сельскохозяйственной культуры для предварительного определения предполагаемой высоты срезающего действия. Для прогнозирования препятствий или требуемых изменений высоты срезания может использоваться сигнал, так что система управления может генерировать подходящие сигналы для подъема или опускания цилиндров 116, 117 в требуемое положение.
Электронная система управления выполнена с возможностью обеспечения динамического управления подъемным усилием, прикладываемым цилиндрами к жатке. Таким образом, в ответ на любое перемещение жатки, обнаруживаемое датчиками положения или другим акселерометром и датчиками относительного перемещения, система управления может изменять давление, подаваемое в цилиндры регулировочными клапанами, для увеличения или уменьшения подъемного усилия относительно заданного состояния плавания для изменения перемещения жатки.
Таким образом, например, при обнаружении ускорения при плавающем перемещении вверх система управления может действовать для изменения сигнала управления для увеличения подъемного усилия для содействия ускорению при плавающем перемещении вверх.
Кроме того, при обнаружении завершения ускорения вверх при плавающем перемещении вверх электронная система управления может действовать для изменения сигнала управления для уменьшения подъемного усилия для демпфирования перемещения вверх.
Два этих динамических действия могут использоваться, например, при столкновении с препятствием или при быстром подъеме уровня земли для быстрого ускорения перемещения жатки вверх для отрыва от земли, а затем для прекращения перемещения вверх за счет демпфирующего действия, вызывающего максимально быстрое плавающее перемещение жатки вниз. Для более быстрого перемещения жатки вниз электронная система управления может действовать для изменения сигнала управления для уменьшения подъемного усилия до значения, меньшего, чем установленное значение плавающего перемещения.
Симметрично, при обнаружении ускорения при плавающем перемещении вниз электронная система управления может действовать для изменения сигнала управления для уменьшения подъемного усилия для содействия ускорению при плавающем перемещении вниз, а при обнаружении завершения ускорения при плавающем перемещении вниз для изменения сигнала управления для увеличения подъемного усилия для демпфирования перемещения вниз.
На Фигуре 3 показано устройство, в котором обеспечен дополнительный аккумулятор 60, который имеет датчик 61 давления и клапан 62 подачи. Этот аккумулятор может использоваться для обеспечения достаточного потока текучей среды во впуск клапанов 18 и 20 для удовлетворения требований быстрого потока текучей среды в цилиндры, если это необходимо. Таким образом, если источник 16 давления, который содержит насос, имеет недостаточный расход при запуске, поток может обеспечиваться аккумулятором.
На Фигуре 4 показан возможный гидравлический контур для захвата энергии плавающего перемещения жатки, который также может быть использован.
В этом варианте изобретения цилиндры 116 и 117 перевернуты относительно цилиндров, показанных на Фигурах 2 и 3. Также давлению, подаваемому в цилиндры от клапанов 18 и 20, противодействует давление от источника 201, включающего в себя аккумулятор 200 при постоянном давлении, так что подъемное усилие создается за счет разности давлений от клапанов 18 и 20 относительно давления от источника 201. Другими словами, подъемное перемещение обеспечивается давлением от источника 201, и ему противодействует давление, подаваемое клапанами 18 и 20, для уменьшения подъемного усилия до значения, определяемого клапанами 18, 20 под управлением системы 28 управления. В связи с этим для увеличения подъемного усилия давление в цилиндрах, подаваемое клапанами 18, 20, уменьшается, и наоборот.
То есть имеется дополнительный аккумулятор 200, который подает энергию для плавающего перемещения плавающим цилиндрам, которая выше, чем обычно требуется для плавающего перемещения жатки. PPRR-клапаны 18, 20 управляются для добавления направленного вниз усилия цилиндрам 116, 117 для плавающего перемещения жатки вниз до земли. Система управления для PPRR-клапанов аналогична устройству, описанному выше, но при использовании этой системы поток и/или давление, требуемые для регулировки плавающего перемещения, являются более низкими.
Также при использовании этой системы система захватывает энергию жатки, совершающей плавающее перемещение вниз, в аккумулятор 200 с использованием промежуточного запорного клапана 203, который служит в качестве запорного клапана, используемого, когда плавающее перемещение должно быть прекращено. Датчик 202 давления и регулировочный клапан 204 используются в сочетании с контроллером 28 для управления давлением в аккумуляторной системе.
В большинстве случаев каждый цилиндр 116, 117 в этом устройстве будет иметь отдельный аккумулятор 200, независимый от аккумулятора другого цилиндра. Поскольку перемещение поршня в цилиндре 116, 117 изменяет объем камеры под поршнем, которая представляет собой сторону подъемного давления поршня, текучая среда должна проходить между нижней/подъемной камерой и соответствующим аккумулятором 200, что изменит давление в камере, поскольку аккумулятор имеет конечный объем. Таким образом, это изменение давления изменит подъемное давление и, следовательно, потребует изменения направленного вниз давления от верхней камеры и клапана 18, 20 для поддержания требуемого общего подъемного усилия. Это может быть скомпенсировано путем использования сигнала от датчика для вычисления изменения давления, которое происходит, или более предпочтительно давление на каждом из двух аккумуляторов 200 определяется датчиком 202 давления и передается в систему 28 управления. Это позволяет вычислить требуемое давление в верхней или нижней камере давления для учета требуемого изменения для получения нового заданного значения для давления, а также требуемое изменение для учета изменения подъемного давления в нижней камере.
Как указано выше, оно поддерживается на постоянном значении, которое может быть разным в зависимости от различных рабочих параметров, и изменения подъемного усилия применяются клапанами 18, 20 с верхней стороны поршня для применения изменения давления, противодействующего постоянному направленному вверх усилию с нижней стороны поршня.
Таким образом, плавающие цилиндры могут использоваться в любой ориентации и показаны перевернутыми в этом варианте выполнения. Следует понимать, что плавающие цилиндры также могут использоваться во втягиваемой конфигурации, а не в выталкиваемой конфигурации. На всех Фигурах 2, 3 и 4 вес жатки направлен вниз. То есть изменения давления, подаваемого клапанами, могут использоваться в нескольких разных ориентациях для изменения подъемного усилия, создаваемого цилиндрами.
Датчики для сбора информации о динамическом состоянии орудия могут включать в себя линейный потенциометр, который измеряет выдвижение гидравлического цилиндра, и преобразователь давления, обеспечивающий обратную связь по подаваемому давлению. В других интерпретациях усилие, передаваемое на орудие с помощью гидравлического цилиндра, может отслеживаться преобразователем усилия, или высота орудия от земли может измеряться либо непосредственно, либо опосредованно.
В дополнение, вместо вычисления скорости и ускорения на основе датчика положения датчики перемещения и акселерометры могут использоваться для обеспечения прямых сигналов, пропорциональных этим значениям.
Устройство может использоваться для достижения полностью регулируемой жесткости пружины для динамики плавающей системы орудия.
Устройство может использоваться для достижения полностью регулируемого демпфирования для динамики плавающей системы орудия.
Устройство может использоваться для достижения полностью регулируемой динамики плавающей системы на основе рабочего состояния орудия, включающего в себя без ограничения высоту орудия, скорость относительно земли и изменения рельефа местности (угол наклона и т.д.).
Устройство может обеспечить оператору выбор из предварительно заданной динамики плавающей системы, которая может адаптироваться к различным полевым условиям и орудиям.
Хотя существующие плавающие системы могут обеспечивать приемлемые усилия на землю, когда жатка неподвижна, так как прикладываемое усилие в общем независимо от состояния движения жатки, жатка будет по-прежнему динамически отвечать на основе ее массы, а не заданного значения плавающей системы. Например, плавающая система может быть установлена так, что усилие на землю составляет 500 фунтов (226,796 кг), однако для того, чтобы жатка ускорялась при перемещении вверх или вниз, требуется дополнительный ввод усилия. На основе второго закона Ньютона (F=ma), это дополнительное усилие будет создавать ускорение жатки, которое обратно пропорционально массе жатки. В связи с этим, хотя жатка может быть статически легкой (т.е. легкой, когда она неподвижна), для того, чтобы она фактически перемещалась вверх и вниз, огибая рельеф земли, ее динамика будет по-прежнему регулироваться ее массой, и более высокие усилия на землю будут требоваться для фактического подъема жатки. Смысл этого устройства заключается в том, что чем меньше установлено статическое усилие на землю, тем медленнее может опускаться жатка. Это связано с тем, что максимальное входное усилие в плавающую систему для опускания жатки равно плавающему весу жатки. В связи с этим, чем меньше плавающий вес жатки, тем меньше получаемое ускорение. Трение в системе также будет влиять на то, насколько легкой может быть плавающая система. Трение создает асимметрию между требуемым усилием на землю при подъеме и опускании жатки. Это приводит к более высокому усилию на землю при подъеме и более медленному перемещению при опускании. Это также создает ограничение на то, насколько легким может быть установлено статическое усилие на землю, поскольку плавающий вес должен быть больше, чем трение в системе, для того, чтобы жатка фактически могла опускаться после подъема.
Плавающая система в соответствии с настоящим изобретением позволяет уменьшить эти ограничения, так как усилие, прикладываемое плавающей системой, может регулироваться на основе состояния движения жатки. На основе собранной обратной связи от датчиков контроллер может фактически добавлять большее усилие в систему при подъеме жатки для содействия более быстрому подъему с меньшим усилием на землю. Дополнительно, когда жатка начинает опускаться, контроллер может уменьшать прикладываемое усилие, так что она опускается быстрее. За счет возможности регулировки усилия, обеспечиваемого плавающей системой, на основе состояния движения жатки динамика жатки может быть изменена так, что она больше не регулируется только массой жатки. Это может позволить тяжелой жатке не только оказывать приемлемое усилие на землю в неподвижном состоянии, но также подниматься и опускаться так, как если бы она фактически имела меньшую массу. Это также преодолевает ограничение, заключающееся в том, что минимальное ускорение перемещения вниз связано с плавающим весом жатки, что также обеспечивает меньшее стационарное усилие на землю плавающей системы, чем может быть достигнуто при использовании традиционной плавающей системы.
Желательно обеспечить механические улучшения, например, уменьшение трения в системе, меньшую зону нечувствительности в гидравлическом клапане и уменьшение гидравлического ограничения потока, подаваемого в цилиндр и из него, поскольку это уменьшит величину вмешательства, требуемого контроллером для получения благоприятной динамики. Улучшение качества сигналов обратной связи для уменьшения эффектов шума (как механического, так и электрического) обеспечивает контроллер более надежными данными, на основе которых принимаются решения по управлению.
Назначение плавающей системы заключается в уменьшении усилия жатки на землю для уменьшения износа и улучшения способности огибания рельефа земли. На сегодняшний день все плавающие системы основаны на статическом равновесии орудия. Другими словами, усилие прикладывается таким образом, что оно поднимает часть веса жатки, так что усилие на землю снижается. При условии, что жатка не перемещается вверх или вниз во всем диапазоне плавающего перемещения, эта система эффективна с точки зрения уменьшения усилия на землю. Например, если жатка весит 7000 фунтов (3175,147 кг), а плавающая система способна удерживать 6800 фунтов (3084,428 кг), то только 200 фунтов (90,7185 кг) будет взаимодействовать с землей. Однако при рассмотрении только статического состояния системы игнорируется два важных фактора, а именно трение и инерция.
В системе без трения усилие на землю одинаково, независимо от того, поднимается или опускается жатка (при условии, что это делается очень медленно). Однако при добавлении трения в систему усилие на землю больше не является одинаковым при подъеме и опускании. Фактически разница между усилием на землю при подъеме и опускании равна двойному трению в системе. В результате трения имеется минимальное усилие на землю, которое может быть достигнуто. Если это минимальное пороговое значение превышается, жатка больше не будет опускаться под своим собственным влиянием после подъема, поскольку плавающий вес жатки является не достаточным для преодоления трения. Хотя минимизация трения в системе может способствовать уменьшению этого эффекта, это по-прежнему будет ограничением системы.
Другим важным недостатком плавающей системы, основанной на статическом равновесии, является то, что динамика жатки будет по-прежнему регулироваться весом жатки, когда она находится в движении. На основе второго закона Ньютона:

Таким образом, жатка весом 7000 фунтов (3175,147 кг) (без трения) со статическим усилием на землю 200 фунтов (90,7185 кг) может достигать максимального ускорения перемещения вниз лишь 0,03 g. Также для ускорения перемещения жатки вверх 0,1 g требуется усилие на землю 900 фунтов (408,233 кг). Хотя статическое усилие на землю может быть достаточно небольшим, чем меньше оно становится, тем медленнее жатка может опускаться после подъема. Также наклон линии (и, следовательно, усилие на землю, требуемое для получения данного ускорения) остается связан с массой жатки, а не с заданным значением плавающей системы. Из-за этого ограничения жатка по-прежнему будет динамически отвечать так, будто она весит 7000 фунтов (3175,147 кг); и все, что может изменить плавающая система, это статическое усилие системы на землю. Неудивительно, что, когда эффект трения сочетается с этим ограничением, имеются ограничения в отношении того, насколько легкой может стать существующая плавающая система до ухудшения ее способности огибания рельефа земли.
Для улучшения динамического ответа плавающей системы необходимо не только изменить статическое усилие плавающей системы на землю, но и то, какое усилие на землю требуется для подъема и опускания жатки. Гидравлическая плавающая система, описанная здесь, обеспечивает это путем введения обратной связи, касающейся динамического состояния системы, в систему управления плавающим перемещением. Хотя для вывода информации, касающейся динамического состояния системы (например, усилия, гидравлического давления или других кинетических измерений) может использоваться множество различных измерений, как описано здесь, выдвижение плавающего цилиндра измеряется потенциометром, и этот сигнал может быть численно дифференцирован для определения полного кинематического состояния системы.
Для изменения динамики жатки с использованием плавающей системы входное усилие от плавающей системы не может оставаться постоянным, вместо этого оно должно меняться в зависимости от динамического состояния (скорости и ускорения) жатки. Целью алгоритма управления является не только уменьшение статического усилия на землю, когда жатка неподвижна, но и уменьшение величины усилия, требуемого для подъема жатки, и обеспечение более быстрого опускания жатки (как если бы жатка была более легкой). Такая система обеспечивает меньшее усилие на землю, а также лучшую способность огибания рельефа земли. Динамически меняющееся усилие, прикладываемое плавающей системой, может уменьшать влияние трения в системе.
Целевое давление, вычисленное на основе положения, скорости и ускорения цилиндра, генерируется с использованием простого PID-контроллера. Этот PID-контроллер периодически просматривает разницу между целевым давлением и измеренным давлением и затем регулирует выходной сигнал для минимизации ошибки. PID-контроллер может быть дополнен справочной таблицей без обратной связи. Возможность стабильно и надежно поддерживать давление в цилиндре на целевом значении позволяет обеспечить быстрый и стабильный ответ цилиндра.
Для уменьшения величины гистерезиса в системе на выходной сигнал в PWM-клапан накладывается подмешивание. Подмешивание представляет собой преднамеренное добавление «шума» в сигнал. В этом случае были использованы синусоидальные подмешивающиеся волны. Следует отметить, что, хотя выходной сигнал контроллера может быть синусоидальным, обеспечиваемое колебание давления не обязательно является идеально синусоидальным из-за способности гидравлики воспроизводить входной сигнал. Подмешивающийся сигнал был вычислен и просто добавлен к выходному сигналу PID-контроллера для получения общего выходного сигнала для клапана.
Есть три параметра, которые можно регулировать для изменения характера подмешивания; а именно амплитуда, период и форма (синусоидальная, квадратная, треугольная и т.д.) волны. Для уменьшения гистерезиса и улучшения ответа системы может быть использовано множество различных параметров.
Относительно эффективное подмешивание может быть достигнуто с использованием периода подмешивающейся волны только 80-100 мс и амплитудой только 2% общего диапазона рабочего цикла работающего PWM-клапана, хотя для достижения подобного результата может быть необходим как более длинный период, так и более высокая амплитуда подмешивающейся волны.
Период подмешивающейся волны, по-видимому, ограничен на нижнем конце отзывчивостью PRR-клапана, а также способностью подавать поток, требуемый для перемещения цилиндра. Выше этого нижнего предела эффект подмешивающейся волны более непосредственно связан с входной мощностью каждой формы полуволны. Вследствие этого при более коротком периоде подмешивающейся волны необходима форма волны с более высокой амплитудой, хотя при более длинном периоде подмешивающейся волны может быть использована форма волны с более низкой амплитудой. Поддержание величины подмешивания на уровне 7% и изменение периода подмешивания на уровне коротких периодов подмешивания <150 мс не были особо эффективными. Периоды подмешивания 200-250 мс являются эффективными, хотя, если период подмешивания дополнительно увеличивается, жатка может заметно трястись. Эта тряска может быть уменьшена путем уменьшения амплитуды формы волны так, что мощность каждой формы полуволны снижается. Однако лучше всего поддерживать период подмешивания максимально коротким для улучшения времени ответа системы, таким образом, следует выбрать самый короткий период подмешивания, который является эффективным.
Любое требуемое движение будет обеспечиваться только половиной формы подмешивающейся волны и сдерживаться другой половиной. Полезно интерпретировать подмешивающуюся волну как контроллер, который последовательно проверяет, стремится ли жатка подняться, а затем проверяет, стремится ли она опуститься. Величина мощности подмешивающейся полуволны, требуемая для выполнения этих проверок, будет относится как к трению в системе, так и к отзывчивости гидравлики. Полезно прекращать подмешивание в состоянии подъема или опускания, поскольку половина подмешивающейся волны будет противодействовать предполагаемому движению.
Ввод давления, положения, скорости и ускорения в структуру управления вычисляются следующим образом. Как рассмотрено выше, цилиндр поддерживается в состоянии постоянного перемещения за счет давления в цилиндре, постоянно слегка изменяющегося за счет синусоидальной волны, применяемой в отношении выхода клапана (что называется подмешиванием). Это может затруднять определение давления и положения цилиндра, поскольку это добавляет существенное количество шума. В результате для различения основного перемещения системы при игнорировании движения, обусловленного подмешиванием, используются технологии фильтрации и усреднения. Эти технологии могут сохранять большую отзывчивость с использованием свойств подмешивающейся волны вместо простой более агрессивной фильтрации.
Так как подмешивание создает изменение давления в цилиндре, а также положения, оба этих значения усредняются за один период подмешивающейся волны для уменьшения влияния этого подмешивания на вычисление. Следовательно, для улучшения отзывчивости этого вычисления желателен более короткий период подмешивания.
Поскольку показатели скорости и ускорения основаны на вычислении разности, они выполняются иначе по сравнению с показателями положения и давления; и вместо рассмотрения только одного периода подмешивания, эти вычисления рассматривают два последних периода подмешивания. Затем положение (или скорость) сравнивается в эквивалентных местоположениях подмешивающейся волны. Это обеспечивает вычисление, чувствительное к изменениям положения, которые меньше по величине, чем изменения, создаваемые подмешивающейся волной. Также вычисление усредняется за один период подмешивания. Скорость вычисляется путем рассмотрения того, насколько изменилось положение между сравниваемыми местоположениями в форме подмешивающейся волны. Для того, чтобы гидравлическая плавающая система имела достаточную способность огибания рельефа земли, желательно, чтобы она имитировала ответ пружины. Для имитирования пружинного эффекта, выдвижение цилиндра используется для изменения давления в цилиндре. В этом случае добавлена простая линейная жесткость пружины. Жесткость пружины вводится путем создания линейной функции, которая определяет целевое давление на основе измеренного выдвижения цилиндра. Это приводит к увеличению требуемого входного усилия, поскольку крыло поднимается. Приведенное ниже уравнение показывает самую последнюю жесткость пружины, используемую для изменения динамики жатки:

На основе существующей пружинной системы считается, что увеличение веса жатки при подъеме является предпочтительным. Это имеет эффект смещения жатки, так что она естественным образом стремиться опуститься. Однако при условии, что целевое давление на заданной высоте приводит к ненулевому усилию на землю, жатка всегда должна стремиться опуститься. Если рельеф местности обуславливает длительные периоды, в течение которых жатка поднята или опущена, эти периоды времени проходят с усилием на землю, которое меньше или больше, чем заданное значение. При условии, что жесткость пружины не установлена слишком агрессивной, это вероятнее всего не является проблемой, однако может быть целесообразным обеспечить более равномерный ответ жатки во всем диапазоне движения для предотвращения слишком легкого и стремительного подъема, когда она является слишком тяжелой, и склонности к нажиму, когда она является слишком легкой.
В одном устройстве заданное давление жатки может следовать за скользящим средним положения жатки. Это является эффективным способом реализации жесткости пружины без ущерба для характеристик давления жатки в случае продолжительных периодов времени за пределами ее нормального положения. Такое устройство заставляет жатку изначально стремиться вернуться в ее последнее положение (либо путем утяжеления при подъеме, либо путем облегчения при опускании), но адаптируется к изменению положения при сохранении в течение определенного периода времени.
В дополнение к изменению динамики жатки относительно положения жатки за счет использования жесткости пружины, для изменения целевого давления относительно скорости и ускорения также используется сигнал потенциометра жатки. Как описано выше, показатели скорости и ускорения вычисляются для минимизации обнаружения перемещения, обусловленного подмешиванием, чтобы сфокусироваться только на основном перемещении жатки.
Показатель скорости относится к демпфированию системы. Однако, поскольку жатка уже имела чрезмерно демпфированный ответ, этот показатель используется для уменьшения демпфирования системы путем усиления движения жатки. Этот показатель имеет некоторые сходства с давлениями, содействующими подъему и опусканию, за исключением того, что вместо добавления постоянного давления к целевому, эффект изменяется в зависимости от скорости жатки. Следует отметить, что этот показатель будет стремится дестабилизировать жатку. Полезно построить нелинейную функцию на основе скорости, которая ограничивает меньшие скорости и усиливает большие скорости. Вероятно, также было бы полезно сделать этот показатель насыщенным при максимальном значении для гарантии того, что этот эффект не уменьшит требуемое усилие на землю для подъема жатки до значения меньше нуля (что вызовет продолжение ускорения жатки при перемещении вверх до тех пор, пока она не достигнет полностью поднятого положения).

Показатель ускорения относится к инерции системы. За счет усиления ускорений контроллер может уменьшить реальную инерцию жатки для содействия ее реакции на входные усилия, как если бы она весила меньше. Однако на практике взятие числовой второй производной от ввода датчика по существу зашумлено, так что возможность реализации этого ограничена. Тем не менее, по-прежнему имеет смысл включить показатель, который связывает целевое давление непосредственно с ускорением жатки в некоторой степени. Хотя первоначально используется одна постоянная, этот показатель может быть разделен на два параметра: один для управления влиянием положительных ускорений и один для управления влиянием отрицательных ускорений.


Положительные ускорения относятся к тому, когда усилие на землю увеличивается, и жатка начинает подниматься, или, когда жатка ударяется о землю после падения. Для того, чтобы жатка могла удерживаться после ее приземления, были использованы положительные ускорения для уменьшения целевого давления контроллера в некоторой степени. Это кратковременно утяжеляет жатку при контакте с землей, предотвращая ее подпрыгивание. Это также имеет эффект, заключающийся в том, что жатка становится несколько тяжелее при первой попытке подъема. Однако, поскольку ускорение жатки, ударяющейся о землю, заметно больше, чем входное ускорения при подъеме жатки, эффект более заметен в случае удара.
Отрицательные ускорения относятся к тому, когда жатка замедляется во время подъема и начинает опускаться. Для того, чтобы предотвратить зависание жатки, также используются отрицательные ускорения для уменьшения целевого давления жатки, что кратковременно утяжеляет ее, и, следовательно, снижает вероятность зависания. Если начать уменьшать скорость подъема жатки, она начнет становиться тяжелее.
Можно построить нелинейные уравнения, которые используют состояния положения, скорости и ускорения движения (а также другие переменные, например, скорость относительно земли, высоту срезания и т.д.) для широкой настройки динамического ответа системы.
Быстрое и точное преобразование целевого давления структуры управления в выходное плавающее усилие системы важно для оптимизации ответа системы. Хотя PID-структура с обратной связью довольно эффективна при воспроизведении целевого давления, более продвинутые технологии управления могут способствовать дополнительному улучшению этого ответа. Может быть использовано включение справочной таблицы без обратной связи и понижение PID-контроллера до корректирующего коэффициента. Можно уменьшить влияние запаздывания клапана путем обеспечения кратковременных выбросов текущего выхода для соленоида, чтобы помочь ему быстрее изменять направления.
Надежное и стабильное измерение положения, скорости и ускорения цилиндра требуется для оперативного управления динамикой плавающего перемещения без добавления нестабильности. Желательно, чтобы эти вычисления обеспечивали чистый сигнал с минимальным запаздыванием. В текущей конфигурации все вычисления связаны с периодом подмешивания независимо от того, активно ли подмешивание фактически. Может быть целесообразным переход к двум разным вычислениям: одному, когда подмешивание активно, и одному, когда оно не активно. Это может содействовать обеспечению более высокой отзывчивости в ситуациях, когда шум, обусловленный подмешиванием, не должен учитываться.
Гидравлическая плавающая система, описанная здесь, обеспечивает плавающую систему, которая является более отзывчивой и имеет улучшенную способность огибания рельефа земли и меньшее усилие на землю. Система основана на использовании электронного контроллера и обратной связи от датчиков для принятия решения о том, какое давление должно подаваться в гидравлический плавающий цилиндр. Затем это давление подается с использованием пропорционального клапана снижения/сброса давления на основе выходного сигнала от контроллера. Полученная система обеспечивает широко настраиваемое гидравлическое давление (и, следовательно, усилие), обеспечиваемое плавающей системой. Это позволяет плавающей системе регулировать усилие, обеспечиваемое плавающей системой, для уменьшения эффектов трения в системе, а также принципиального изменения динамики перемещения жатки.
Вернемся к Фигуре 6, на которой показан график работы системы для изменения усилия на землю в ответ на перемещение жатки.
Как показано, обеспечена промежуточная область или центральная зона, которая действует как зона нечувствительности, в которой не применяется никаких изменений усилия на землю, как обозначено ссылочной позицией 91, в ответ на изменения высоты жатки, обнаруживаемые датчиками 120, 121, описанными выше, которые определяют положения цилиндров. На каждом конце 92, 93 центральной зоны усилие на землю увеличивается с заданного значения 95, как обозначено ссылочными позициями 95, 96 на линейной шкале, прямо пропорционально высоте земли. Следует отметить, что усилие на землю увеличивается как при увеличении высоты относительно номинальной базовой высоты, обозначенной ссылочной позицией 0, так и при уменьшении высоты. Темп увеличения усилия на землю при подъеме жатки, как показано ссылочной позицией 96, больше, чем при опускании жатки, как показано ссылочной позицией 95. Темпы увеличения могут быть адаптированы для обеспечения отклика жатки на перемещение, который наилучшим образом поддерживает жатку в контакте с землей. Темпы могут быть линейными, как показано. Темпы могут быть более сложными, включающими участки, определяемые скоростью и/или ускорением жатки при ее перемещении вверх или вниз. Предпочтительно, что темп увеличения направленного вниз усилия со стороны подъема центральной зоны больше, чем со стороны опускания, так как подъемное действие часто обусловлено столкновением с препятствием, так что оно более агрессивно или интенсивно при перемещении, требующем большего отклика плавающей системы путем уменьшения подъемного усилия.
Центральная зона или зона 91 нечувствительности может быть нулевой или может представлять собой точку на центральной линии 0, или она может иметь конечную протяженность, чтобы позволять небольшие изменения высоты до введения изменения плавающего режима для уменьшения подъемного усилия, вызывающего увеличение усилия на землю. Длина центральной зоны 91, а также коэффициент 95, 96 пропорциональности могут регулироваться программой.
Следует понимать, что традиционная наклонная камера традиционного уборочного комбайна зерноуборочной системы обычно включает в себя центрирующую систему, в которой наклонная камера постоянно поднимается и опускается колеблющимся образом, пытаясь поддерживать высоту опоры жатки на наклонной камере на средней высоте плавающего перемещений. То есть центральная точка постоянно меняется, когда наклонная камера пытается поддерживать высоту плавания жатки в середине диапазона плавающего перемещения. Однако промежуточная область центральной зоны обычно находится посередине между верхним и нижним пределами плавающего перемещения. В типичной системе плавающее перемещение может составлять порядка 6 дюймов (15,24 см) в любом направлении от центральной точки. Подходящая зона нечувствительности может составлять от 1 до 2 дюймов (от 2,54 до 5,08 см), чтобы режущий аппарат мог совершать плавающее перемещение вверх и вниз на это расстояние без изменения подъемного усилия.
Увеличение усилия на землю достигается в устройстве, показанном на Фигуре 3, за счет уменьшения давления в цилиндрах, действующих для подъема жатки, для уменьшения подъемного усилия. В устройстве, показанном на Фигуре 4, увеличение усилия на землю достигается за счет увеличения противодавления с задней стороны цилиндра относительно постоянного подъемного усилия, обеспечиваемого со стороны подъема цилиндра.
Как показано на Фигуре 7, обеспечена система, подобная системе, показанной на Фигуре 4, в которой подъемное усилие, превышающее усилие, необходимое для подъема жатки, обеспечивается гидравлическим цилиндром 96, и ему противодействует второй цилиндр 97, причем давление второго цилиндра 97 действует в направлении вниз против подъемного усилия от цилиндра 96 и регулируется клапанами 18, 20, как описано выше, под управлением контроллера 28.
Как показано на Фигуре 8, обеспечена система, подобная системе, показанной на Фигуре 4, в которой подъемное усилие, превышающее усилие, необходимое для подъема жатки, обеспечивается гидравлическим цилиндром 96, и ему противодействует механическое пружинное устройство 98, причем усилие пружины, создаваемое пружиной 98, регулируется механической системой 981 под управлением контроллера 28.
Таким образом, система может проходить следующие этапы:
Этап 1: В обоих аккумуляторах 200 и 60 нет масла.
Этап 2: Зарядка нижнего аккумулятора для отрыва жатки от земли путем добавления масла из зарядного контура. Заданное давление в нижнем аккумуляторе обычно составляет 1500-2400 фунтов на квадратный дюйм (10,34-16,55 МПа) в зависимости от веса жатки. После этого давление в нижнем аккумуляторе поддерживается на фиксированном значении.
Этап 3: Зарядка верхнего аккумулятора 60 маслом. Добавление масла из внешнего зарядного контура. Давление поддерживается на значении 1100-2400 фунтов на квадратный дюйм (7,58-16,55 МПа) с использованием контура привода полотенного транспортера и/или зарядных клапанов.
Этап 4: Определение заданного значения плавающего перемещения. Подача команды PPR-клапану для увеличения давления до тех пор, пока жатка не опустится до упора. Давление в нижнем аккумуляторе увеличилось за счет нагнетания масла в нижний аккумулятор 200. Когда жатка опустилась до упора, следует запомнить это давление в качестве заданного значения для плавающего перемещения.
Этап 5: Режим плавания активен. Регулировка давления с использованием PPR-клапана 18, 20 для уравновешивания веса жатки и поддержания требуемого усилия на землю. Необходимое давление зависит от положения в диапазоне плавающего перемещения. Периодическое добавление масла по мере необходимости из источника давления, например, из контура привода полотенного транспортера. Обычно варьируется от 1000 до 3000 фунтов на квадратный дюйм (6,89-20,68 МПа). Нижняя система остается закрытой. Масло подается в аккумулятор 200 и из него при плавающем перемещении жатки вниз и вверх. Давление варьируется в зависимости от положения плавания. Давление газа в зависимости от аккумулятора (без учета изменений температуры). Мы можем вычислить, какое давление должно быть в нижнем аккумуляторе, основываясь на датчике положения на основе объема масла в аккумуляторе. Следовательно, мы можем отслеживать давление и поддерживать его в пределах диапазона допуска для компенсации утечки, изменений температуры и т.д. Это выполняется лишь периодически и только для компенсации утечки, изменений температуры и т.д.
Клапан снижения/сброса давления (PRR) регулирует давление от 0 до 820 фунтов на квадратный дюйм (0-5,65 МПа) на основе требований системы. Верхний аккумулятор 60 представляет собой резервуар для хранения для немедленного ответа. Он подает давление как в систему LH, так и в систему RH. Датчик положения определяет выдвижение цилиндра с каждой стороны. Нижний аккумулятор установлен на фиксированное давление и поддерживается относительно положения плавания. Каждая сторона имеет свой собственный аккумулятор.
Такое устройство позволяет системе применять «жесткость пружины» в отношении системы, которая может добавлять давление на верхнюю сторону цилиндра, искусственно утяжеляя жатку при плавающем перемещении вверх.
Система действует для определения положения цилиндра, на основе которого она получает скорость и ускорение жатки. На основе этого система определяет, была ли жатка поднята землей, или это усилие рассеялось. Если жатка больше не ускоряется вверх (то есть она утратила контакт с землей), система действует для добавления давления в верхней части цилиндра и заставляет ее опуститься на землю.
Система может добавлять «подмешивание» в верхней части цилиндра для поддержания уплотнений поршня/штока в постоянном движении для уменьшения эффекта гистерезиса.
Вернемся к конструкции, показанной на Фигуре 9, она включает в себя все компоненты, подробно описанные выше для управления подъемными усилиями в конструкции. Машина для уборки сельскохозяйственной культуры, в этом случае жатка 104, установленная на уборочном комбайне 63, показана лишь схематически.
Рама в этом варианте выполнения имеет первый или центральный участок 64 рамы и второй или крыльевой участок 65 рамы, соединенный с центральным участком с помощью шарнира 66, так что крыльевая рама может шарнирно поворачиваться вверх и вниз в ответ на изменения рельефа земли за счет внешнего конца 67 крыльевой рамы, перемещающегося вверх и вниз. То есть центральный участок рамы шарнирно соединен на шарнире 66 с крыльевым участком рамы вокруг оси, в общем параллельной направлению движения транспортного средства вперед, для поворотного перемещения вверх и вниз.
Каждый из центрального и крыльевого участков рамы имеет обрабатывающий сельскохозяйственную культуру компонент 114, включающего в себя взаимодействующую с сельскохозяйственной культурой систему, содержащую режущий аппарат, и по меньшей мере один взаимодействующий с землей компонент 128 для обеспечения поддерживающего усилия от земли, как описано выше. Эти компоненты не показаны на схематической иллюстрации на Фигуре 9. Следует понимать, что обычно также имеется второй крыльевой участок рамы, симметричный первому и установленный симметричным образом, как описано здесь.
Для поддержания центрального участка 64 рамы относительно транспортного средства 63 обеспечено первое поддерживающее устройство 68. Это поддерживающее устройство включает в себя цилиндр 69, соединенный в верхней части с элементом рамы комбайна, обеспеченным в передней части наклонной камеры (не показана), а в нижней части со звеном 108, которое продолжается вперед до подъемного соединения 70 под центральным участком жатки. Крыльевой участок 65 удерживается от поворотного перемещения вниз к земле поддерживающим устройством 68A, включающим в себя дополнительный цилиндр 71, присоединенный между соединением 72 на центральном участке и соединением 73 на крыльевом участке на внутреннем конце крыльевого участка для удержания крыльевого участка под требуемым углом относительно шарнира 66.
Цилиндры 69 и 71 имеют конструкцию и принцип работы, как показано и описано в отношении Фигуры 4.
То есть центральный участок 64 поддерживается на двух цилиндрах 69, имеющих конструкцию и принцип работы, как у цилиндров 116 и 117, один из которых показан ссылочной позицией 69 на Фигуре 9. Цилиндр 71 крыльевого участка имеет такую же конструкцию и принцип работы, как у одного из цилиндров 116, 117. Как показано на Фигуре 9, цилиндр 69 центрального участка работает во взаимодействии с цилиндром 71 крыльевого участка.
Симметрично другой поддерживающий цилиндр для центрального участка работает во взаимодействии с цилиндром второго крыльевого участка, но они не показаны и не описаны, поскольку они симметричны компонентам 69 и 71.
Поддерживающие цилиндры 69 и 71 работают так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента обеспечивается подъемным усилием от поддерживающего устройства, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом за счет давления на землю. Выше четко описано, что цилиндры 69 и 71 работают таким образом в отношении участков 64 и 65.
Цилиндр 69 включает в себя поршень 74, делящий цилиндр на нижнюю и верхнюю камеры 74A, 74B. Цилиндр 71 включает в себя поршень 75, делящий цилиндр на отдельные камеры 75A, 75B.
Таким образом, первое поддерживающее устройство 68 включает в себя первый гидравлический плавающий цилиндр 69 и первую гидравлическую систему, в целом обозначенную ссылочной позицией 76. Система 76 включает в себя первый участок 76A, подающий гидравлическую текучую среду под давлением в камеру 74A, и второй участок 76B, подающий гидравлическую текучую среду под давлением в камеру 74B.
Второе поддерживающее устройство 68A включает в себя второй гидравлический плавающий цилиндр 71 и вторую гидравлическую систему, в целом обозначенную ссылочной позицией 80. Система 80 включает в себя первый участок 76A, который является общим для обоих цилиндров 69 и 71, подающий гидравлическую текучую среду под давлением в камеру 75A, и второй участок 80B, подающий гидравлическую текучую среду под давлением в камеру 75B.
Участок 76A, который является общим для камер 74A и 75A, включает в себя аккумулятор 761, заряженный до требуемого давления зарядной системой 770, датчик 762 давления, запорный клапан 763, путь 764 к камере 74A и путь 765 к камере 75A.
Участок 76B для камеры 74B включает в себя аккумулятор 766, PPRR-клапан 767, датчик 768 давления и путь 769 к камере 74B.
Участок 80B для камеры 75B включает в себя аккумулятор 766, PPRR-клапан 801, датчик 802 давления, запорный клапан 803 и путь 804 к камере 75B.
Общий аккумулятор 761 для камер 74A и 75A служит для зарядки этих камер до подъемного давления, превышающего требуемое подъемное давление. Аккумулятор заряжен до заданного давления, как описано выше.
PPRR-клапаны 767 и 801 работают, как описано выше в отношении камер 74B и 75B.
Электронная система 81 управления принимает входные сигналы от датчиков 82 и 83 положения, определяющих положения перемещения цилиндров 69 и 71. Система 81 управления обеспечивает выходные сигналы для управления PPR-клапанами 767 и 801 и зарядной системой 770.
Как описано выше, цилиндры 69 и 71 обеспечивают подъемное усилие со стороны поршней 74 и 75, определяемое камерами 74A и 75A, которое установлено на требуемое значение зарядной системой 761 и поддерживаться на заданном значении и регулируется только для предотвращения отклонения. Противодавление обеспечивается PPRR-клапанами 767 и 801 в камерах 74B и 75B под управлением системы 81 управления с использованием операций и алгоритмов, описанных выше.
Таким образом, система 81 управления действует для подачи сигнала управления для изменения давления по меньшей мере первой гидравлической системы 76 путем управления клапаном 767 для изменения противодавления в камере 74A, для этого система 81 управления принимает сообщение от датчика 83 положения на втором поддерживающем устройстве 68A, так что поворотное перемещение крыльевого участка рамы относительно центрального участка рамы изменяет давление в первой гидравлической системе центрального участка.
Также, как показано, система 81 управления принимает сообщение как от датчика 82 положения на первом поддерживающем устройстве, так и от датчика 83 на втором поддерживающем устройстве для изменения давления как в первой, так и во второй гидравлических системах на клапанах 767 и 801.
Как описано выше, клапан 767 имеет характеристику, заключающуюся в том, что клапанное устройство действует для поддержания давления гидравлической текучей среды в камере 74B на постоянном значении в зависимости от сигнала управления от системы 81 управления. При необходимости симметрично и под другим давлением клапан 801 имеет характеристику, заключающуюся в том, что клапанное устройство действует для поддержания давления гидравлической текучей среды в камере 75B на постоянном значении в зависимости от сигнала управления от системы 81 управления во время изменений объема камеры, вызванных перемещением поршня.
Первая гидравлическая система содержит первую систему 76A подъемного давления, выполненную с возможностью приложения давления к стороне поршня 74 в цилиндре 69 в направлении подъема обрабатывающего сельскохозяйственную культуру компонента, причем давление обеспечивает подъемное усилие, превышающее требуемое подъемное усилие, и систему 76B прижимного давления для приложения прижимного давления в направлении опускания обрабатывающего сельскохозяйственную культуру компонента и приложения давления на землю. Вторая гидравлическая система 80 содержит вторую систему подъемного давления, образованную общей системой 76A, выполненную с возможностью приложения давления к стороне поршня 75 во втором цилиндре 81 в направлении подъема обрабатывающего сельскохозяйственную культуру компонента, и вторую систему 80 прижимного давления для приложения прижимного давления в направлении опускания обрабатывающего сельскохозяйственную культуру компонента и приложения давления на землю.
Электронная система управления работает для изменения первой и второй систем прижимного давления, но не первой и второй систем подъемного давления, которые остаются постоянными, как установлено зарядной системой 770.
Первая и вторая системы подъемного давления, образованные общей системой 76A, включают в себя общий аккумулятор 761 так, что сгибание крыльевого участка рамы вниз подает дополнительную текучую среду из камеры 75A в камеру 74A цилиндра 69 для приложения дополнительного подъемного давления к центральному участку рамы, и так, что сгибание второго участка рамы вверх извлекает текучую среду из цилиндра первой гидравлической системы для приложения меньшего подъемного давления к первому участку рамы.
Как описано выше и показано на Фигуре 6, система 81 управления выполнена с возможностью изменения давления в камере 74A цилиндра 69 так, что подъемное усилие уменьшается как при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх из промежуточного положения плавания, так и при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вниз из промежуточного положения плавания.
Как описано выше, система 81 управления выполнена с возможностью генерации значения, указывающего ускорение и/или скорость обрабатывающего сельскохозяйственную культуру компонента при указанном плавающем перемещении вверх и вниз обрабатывающего сельскохозяйственную культуру компонента, и изменения сигнала управления в ответ на указанное значение ускорения и/или скорости.
Фигура 9 иллюстрирует одну сторону всей системы, причем проиллюстрированные компоненты дублируются для другой стороны жатки, за исключением верхнего аккумулятора 766, так как для всей машины требуется только один такой аккумулятор, и этот аккумулятор имеет достаточное давление и расход для питания всех четырех PPRR-клапанов.
В этом варианте выполнения обеспечен один аккумулятор 761, который используется для обеспечения давления для плавающего перемещения всей стороны жатки и плавающего перемещения крыла. Цилиндры могут иметь такой размер, что давление, требуемое для каждой из этих функций (плавающее перемещение и сгибание), может быть по существу одинаковым, так что давления управления от двух PPRR-клапанов 767 и 801 могут быть одинаковыми.
При использовании этого варианта выполнения, когда крыло совершает плавающее перемещение вверх, давление в нижнем аккумуляторе 761 будет естественным образом снижаться, так как масло будет выходить из аккумулятора для подъема крыла, что приведет к естественному уменьшению подъемного усилия плавающего цилиндра 69 даже до изменения давления на верхней стороне 75B цилиндра с помощью PPRR-клапана. Это представляет собой требуемый эффект, хотя и не обязательный, поскольку система может обеспечить это управление полностью с помощью PPRR-клапана. То есть в альтернативном устройстве (не показано) аккумулятор 761 разделен на два отдельных аккумулятора со своими заданными давлениями, причем каждый из них заряжает камеры 74A и 75A соответственно, в результате чего эффект, за счет которого камеры 74A и 75A сообщаются для автоматической передачи подъемных усилий, больше не используется и полностью заменяется управлением противодавлением в камерах 74B и 75B.
Показанные запорные клапаны 763 и 803 предназначены для фиксации сгибания и плавающего перемещения в фиксированном положении для использования при отсоединении жатки от комбайна и/или для транспортировки.
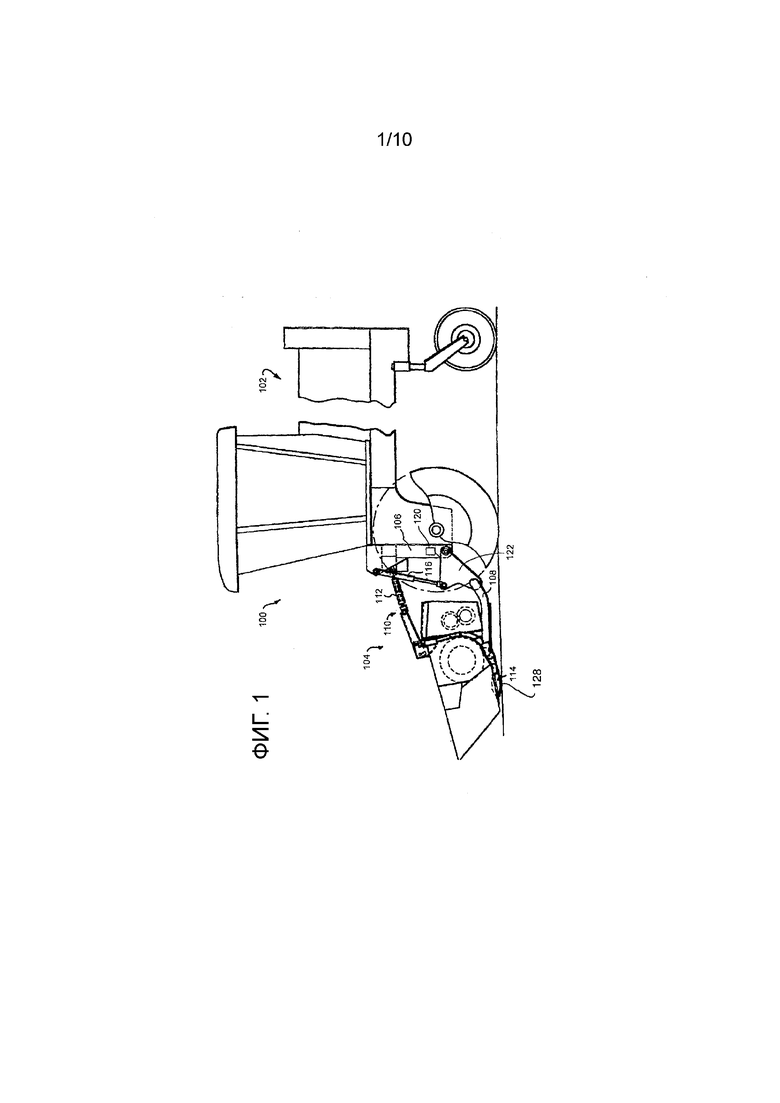
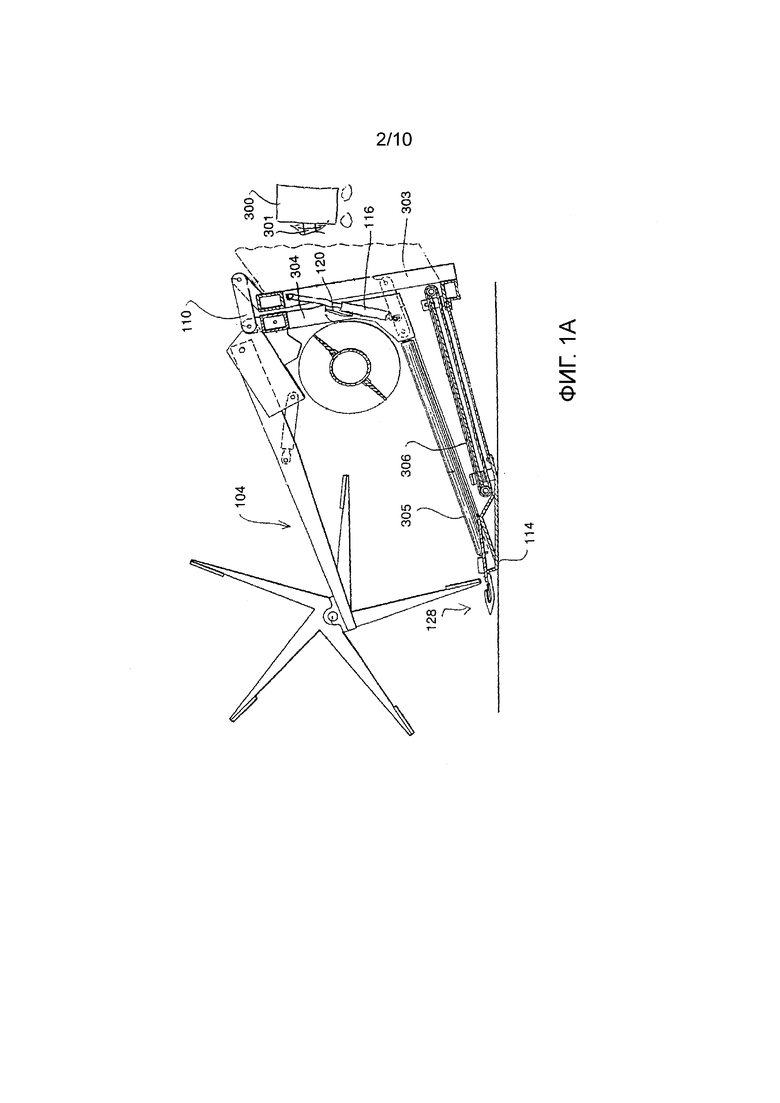
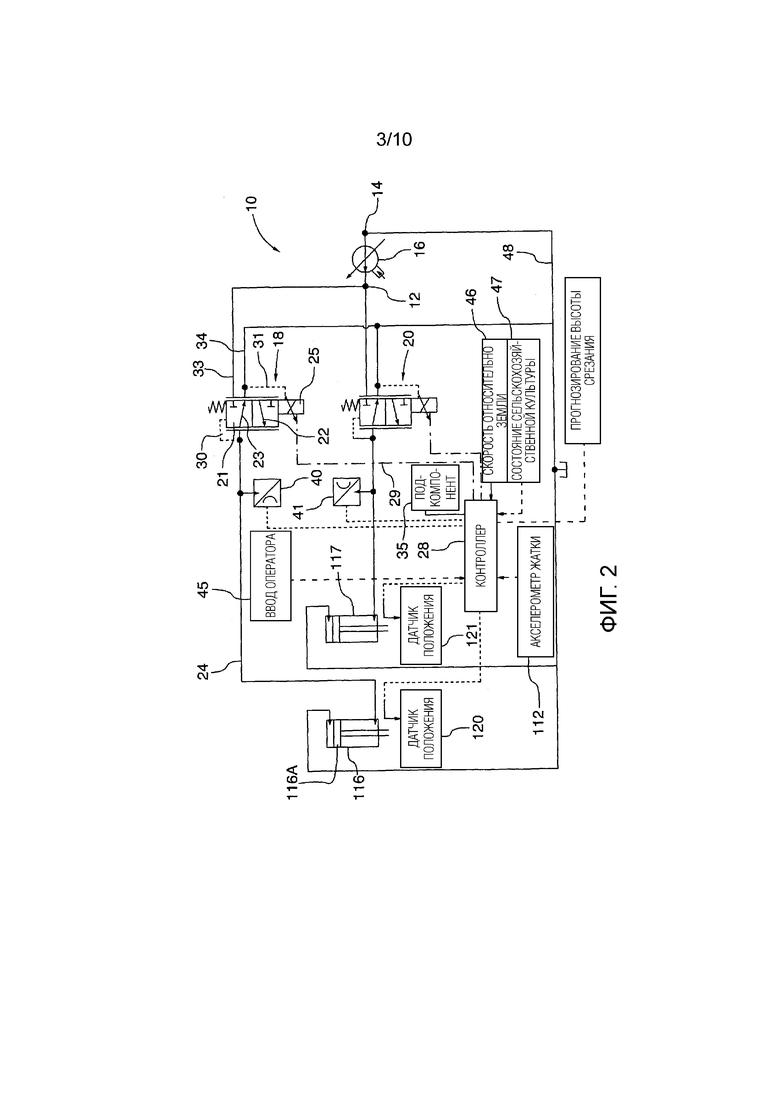
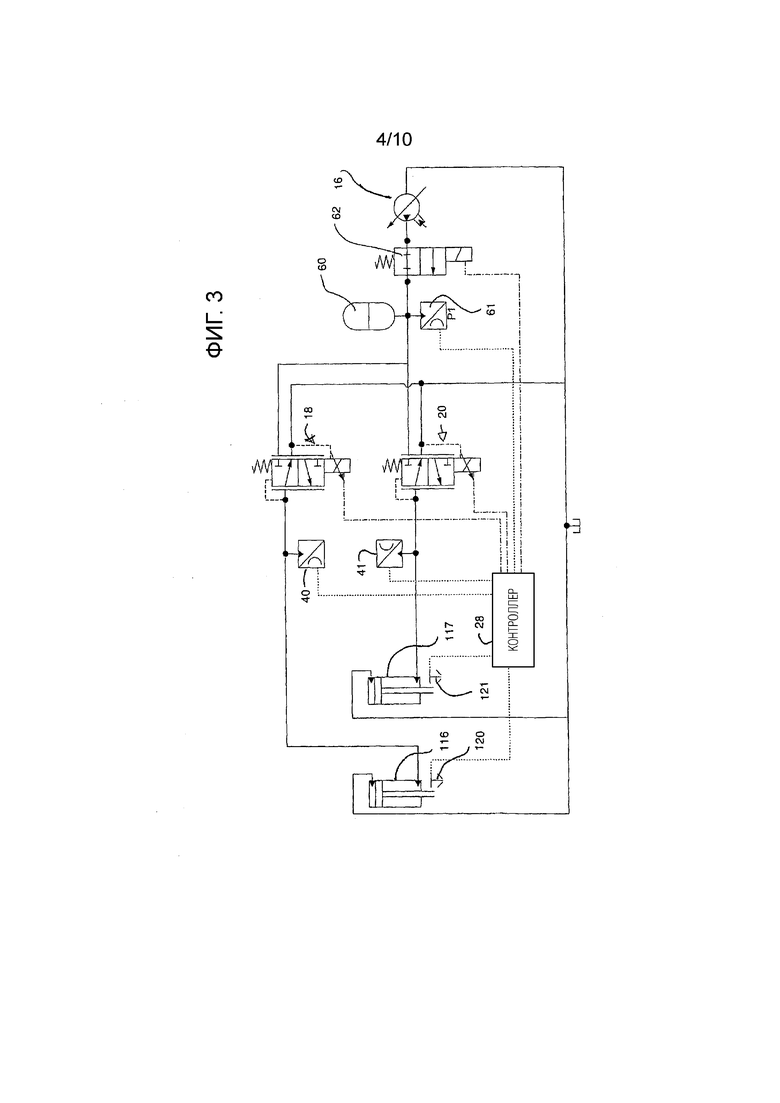
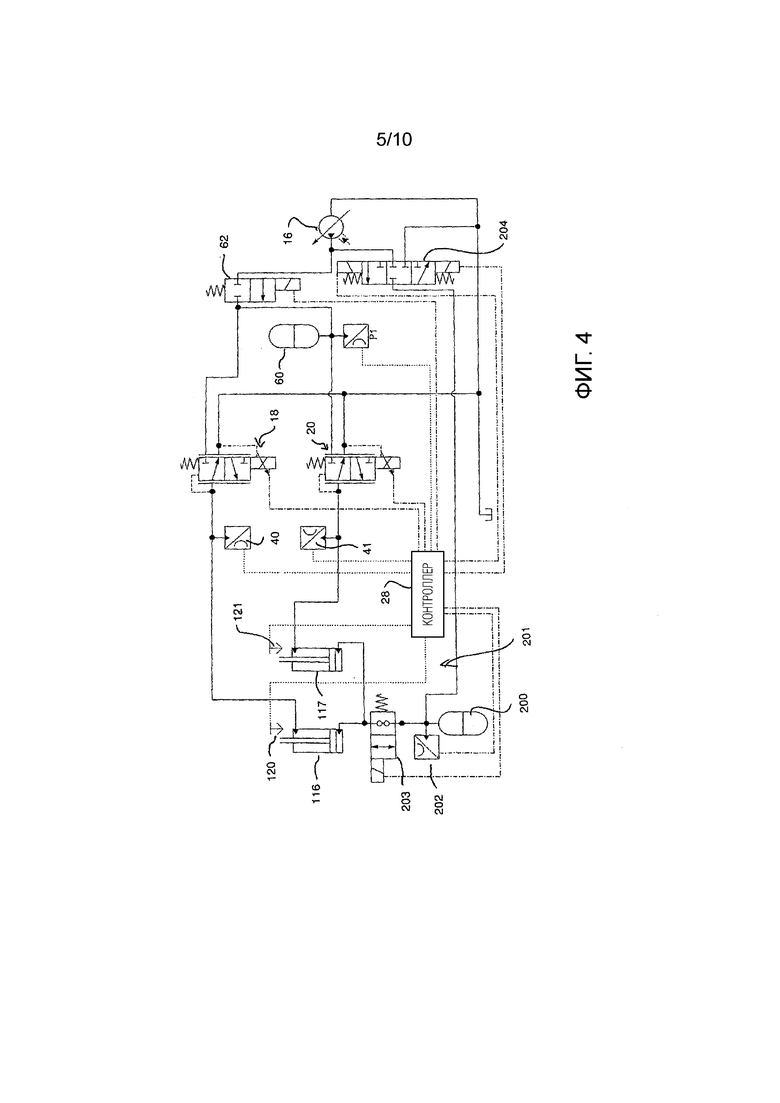
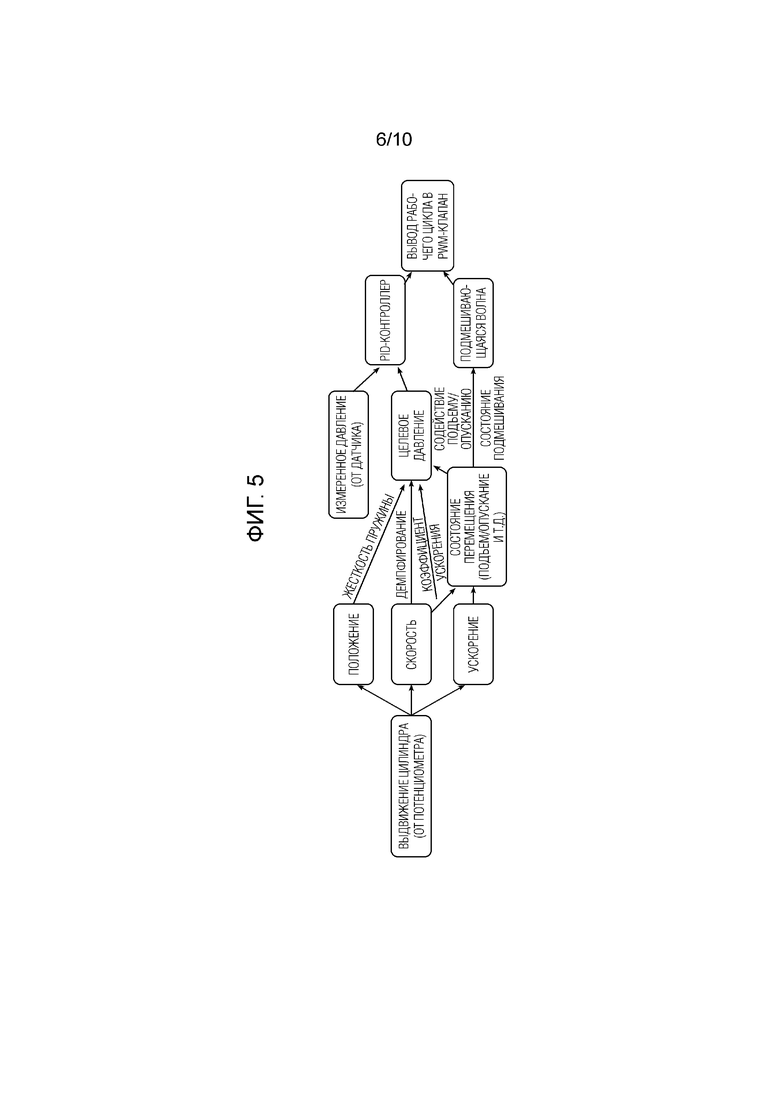
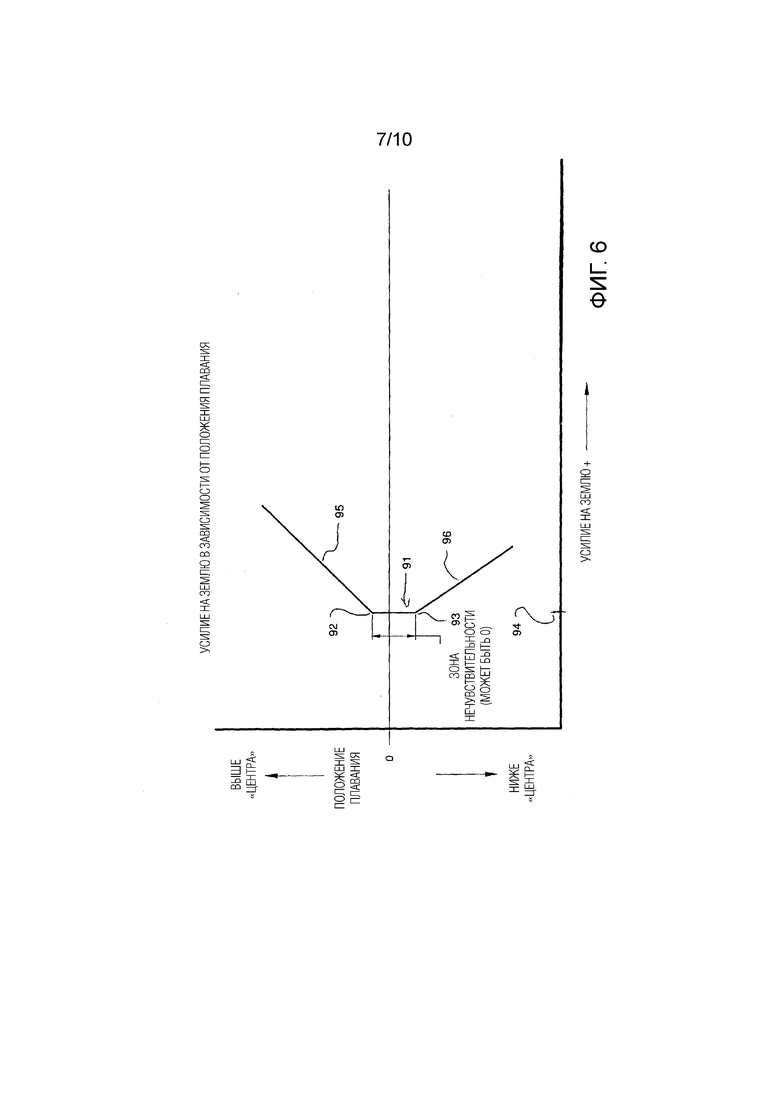
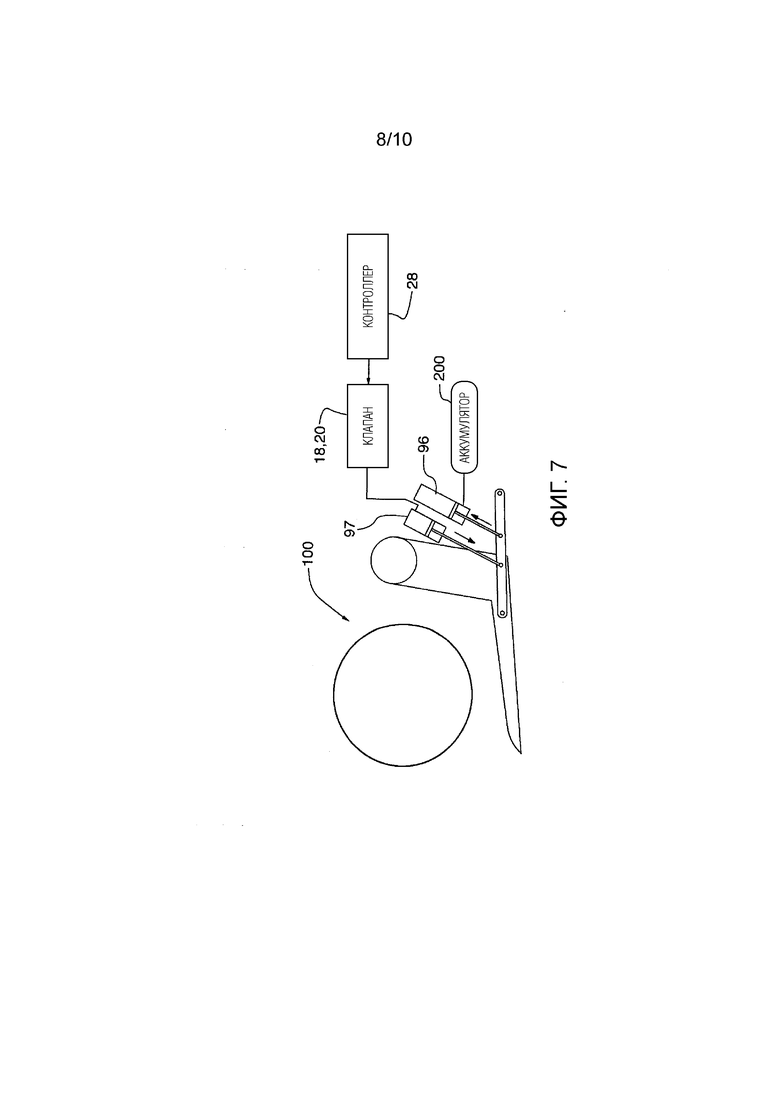
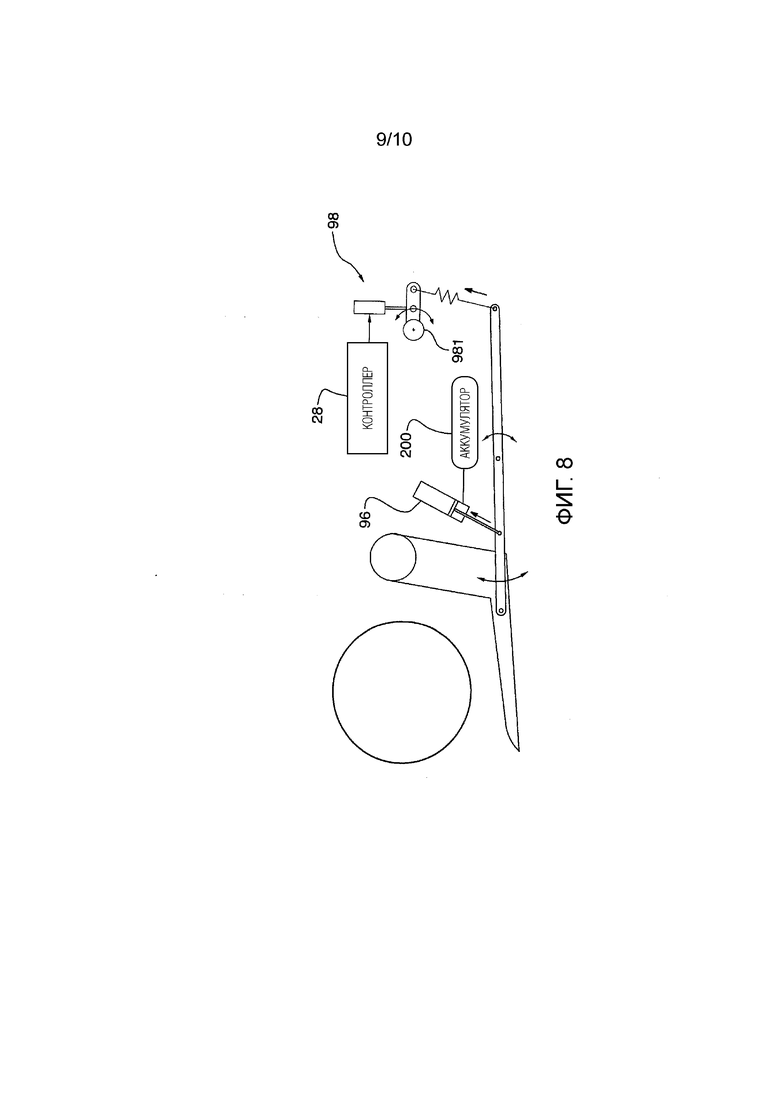
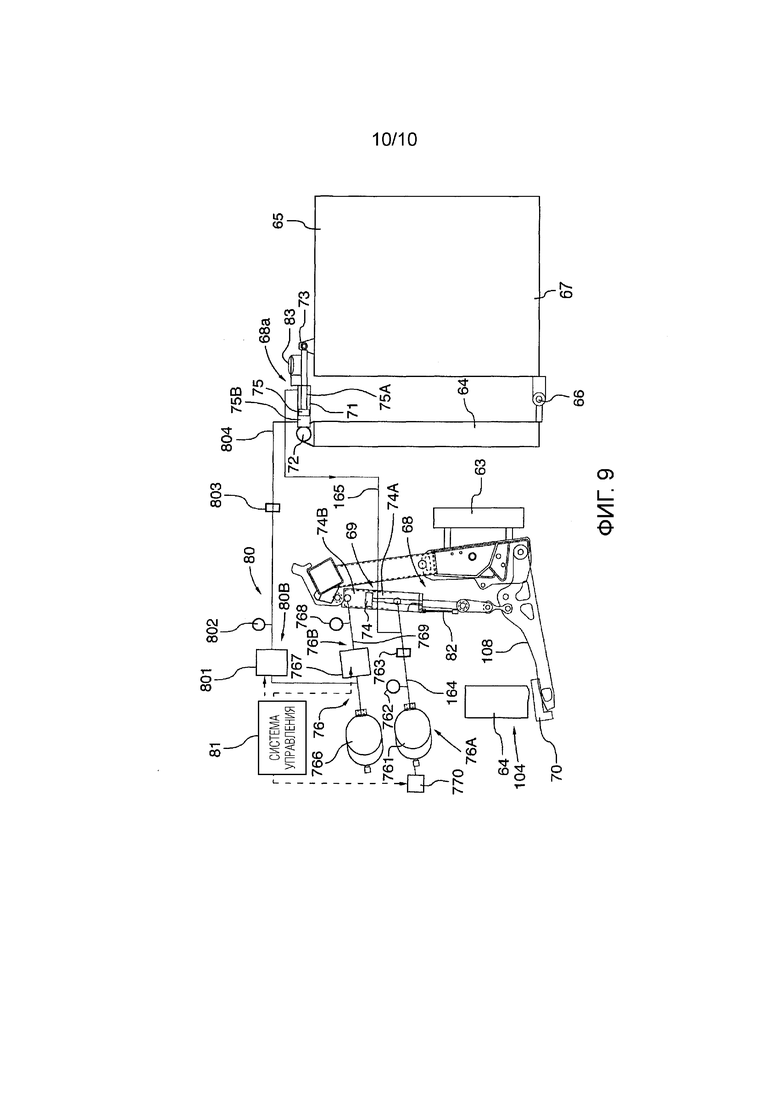
Группа изобретений относится к сельскому хозяйству. Машина для уборки сельскохозяйственной культуры и уборочный комбайн содержат несущее транспортное средство для перемещения по земле, имеющее наклонную камеру, обрабатывающий сельскохозяйственную культуру компонент, включающий в себя взаимодействующую с сельскохозяйственной культурой систему и по меньшей мере один взаимодействующий с землей компонент для обеспечения поддерживающего усилия от земли, поддерживающее устройство, расположенное между наклонной камерой и обрабатывающим сельскохозяйственную культуру компонентом для поддержания обрабатывающего сельскохозяйственную культуру компонента относительно транспортного средства для плавающего перемещения вверх и вниз относительно промежуточного положения плавания обрабатывающего сельскохозяйственную культуру компонента вверх и вниз так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента обеспечивается подъемным усилием от поддерживающего устройства, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом за счет давления на землю. Поддерживающее устройство содержит по меньшей мере один гидравлический плавающий цилиндр, имеющий поршень, выполненный с возможностью перемещения в цилиндре так, что перемещение поршня относительно цилиндра вызывает приложение указанного подъемного усилия к обрабатывающему сельскохозяйственную культуру компоненту, и гидравлическую систему, содержащую гидравлическую текучую среду под давлением для приложения давления к стороне поршня в указанном по меньшей мере одном цилиндре в направлении подъема обрабатывающего сельскохозяйственную культуру компонента и выполненную при работе с возможностью обеспечения давления, определяющего подъемное усилие, превышающее требуемое подъемное усилие, а также систему прижимного давления для приложения прижимного давления к обрабатывающему сельскохозяйственную культуру компоненту в направлении опускания обрабатывающего сельскохозяйственную культуру компонента и приложения указанного давления на землю. Система прижимного давления включает в себя электронную систему управления для подачи сигнала управления для изменения прижимного давления, датчик, выполненный с возможностью подачи сигнала датчика в указанную электронную систему управления в ответ на перемещение обрабатывающего сельскохозяйственную культуру компонента при указанном плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх и вниз, причем указанная электронная система управления в ответ на указанный сигнал датчика выполнена с возможностью временного изменения сигнала управления для временного изменения прижимного давления. Электронная система управления выполнена с возможностью изменения давления так, что подъемное усилие от поддерживающего устройства уменьшается как при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх из промежуточного положения плавания, так и при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вниз из указанного промежуточного положения плавания. Электронная система управления и указанный датчик в ответ на указанный сигнал выполнены с возможностью генерации значения, указывающего ускорение и/или скорость взаимодействующей с сельскохозяйственной культурой системы при указанном плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх и вниз, и изменения сигнала управления в ответ на указанное значение ускорения и/или скорости. Обеспечивается исключение повреждения жатки. 3 н. 14 з.п. ф-лы, 10 ил.
1. Машина для уборки сельскохозяйственной культуры, содержащая:
несущее транспортное средство для перемещения по земле;
обрабатывающий сельскохозяйственную культуру компонент, включающий в себя взаимодействующую с сельскохозяйственной культурой систему и по меньшей мере один взаимодействующий с землей компонент для обеспечения поддерживающего усилия от земли;
поддерживающее устройство для поддержания обрабатывающего сельскохозяйственную культуру компонента относительно транспортного средства для плавающего перемещения обрабатывающего сельскохозяйственную культуру компонента вверх и вниз так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента обеспечивается подъемным усилием от поддерживающего устройства, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом за счет давления на землю;
причем поддерживающее устройство содержит:
по меньшей мере один гидравлический плавающий цилиндр, имеющий поршень, выполненный с возможностью перемещения в цилиндре так, что перемещение поршня относительно цилиндра вызывает приложение указанного подъемного усилия к обрабатывающему сельскохозяйственную культуру компоненту;
гидравлическую систему, содержащую гидравлическую текучую среду под давлением для приложения давления к стороне поршня в указанном по меньшей мере одном цилиндре в направлении подъема обрабатывающего сельскохозяйственную культуру компонента;
причем гидравлическая система при работе выполнена с возможностью обеспечения давления, определяющего подъемное усилие, превышающее требуемое подъемное усилие;
и систему прижимного давления для приложения прижимного давления к обрабатывающему сельскохозяйственную культуру компоненту в направлении опускания обрабатывающего сельскохозяйственную культуру компонента и приложения указанного давления на землю;
при этом система прижимного давления включает в себя электронную систему управления для подачи сигнала управления для изменения прижимного давления,
датчик, выполненный с возможностью подачи сигнала датчика в указанную электронную систему управления в ответ на перемещение обрабатывающего сельскохозяйственную культуру компонента при указанном плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх и вниз, причем указанная электронная система управления в ответ на указанный сигнал датчика выполнена с возможностью временного изменения сигнала управления для временного изменения прижимного давления;
причем электронная система управления выполнена с возможностью изменения давления так, что подъемное усилие от поддерживающего устройства уменьшается как при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх из промежуточного положения плавания, так и при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вниз из указанного промежуточного положения плавания; и
при этом указанная электронная система управления и указанный датчик в ответ на указанный сигнал выполнены с возможностью генерации значения, указывающего ускорение и/или скорость взаимодействующей с сельскохозяйственной культурой системы при указанном плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх и вниз, и изменения сигнала управления в ответ на указанное значение ускорения и/или скорости.
2. Машина для уборки сельскохозяйственной культуры по п. 1, в которой электронная система управления работает на системе прижимного давления, а не на гидравлической системе.
3. Машина для уборки сельскохозяйственной культуры по п. 1 или 2, в которой система прижимного давления независима от гидравлической системы.
4. Машина для уборки сельскохозяйственной культуры по любому из пп. 1-3, в которой указанная электронная система управления в ответ на указанный сигнал датчика выполнена с возможностью последующего возврата к заданному значению прижимного давления.
5. Машина для уборки сельскохозяйственной культуры по п. 3 или 4, в которой указанная электронная система управления в ответ на изменения указанного сигнала датчика выполнена с возможностью временного изменения сигнала управления для изменения прижимного усилия системы прижимного давления в ответ на обнаруженное перемещение обрабатывающего сельскохозяйственную культуру компонента.
6. Машина для уборки сельскохозяйственной культуры по любому из пп. 3-5, в которой давление от указанной гидравлической системы не изменяется в ответ на указанный сигнал датчика.
7. Машина для уборки сельскохозяйственной культуры по любому из пп. 1-6, в которой система прижимного давления выполнена с возможностью изменения давления в гидравлической системе прижимного давления, причем гидравлическая текучая среда из гидравлической системы прижимного давления подается в цилиндр с обратной стороны поршня для противодействия давлению от указанной гидравлической системы.
8. Машина для уборки сельскохозяйственной культуры по п. 7, в которой электронная система управления работает на системе прижимного давления и учитывает изменения давления в системе подъемного давления, вызванные перемещением поршня.
9. Машина для уборки сельскохозяйственной культуры по любому из пп. 1-8, в которой транспортное средство содержит уборочный комбайн, имеющий наклонную камеру, а указанный обрабатывающий сельскохозяйственную культуру компонент содержит жатку, имеющую режущий аппарат для срезания сельскохозяйственной культуры на корню, и при этом поддерживающая система расположена между наклонной камерой и жаткой.
10. Машина для уборки сельскохозяйственной культуры, содержащая:
несущее транспортное средство для перемещения по земле;
обрабатывающий сельскохозяйственную культуру компонент, включающий в себя взаимодействующую с сельскохозяйственной культурой систему и по меньшей мере один взаимодействующий с землей компонент для обеспечения поддерживающего усилия от земли;
поддерживающее устройство для поддержания обрабатывающего сельскохозяйственную культуру компонента так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента обеспечивается подъемным усилием от поддерживающего устройства, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом за счет давления на землю;
причем поддерживающее устройство выполнено с возможностью поддержания обрабатывающего сельскохозяйственную культуру компонента для плавающего перемещения вверх и вниз относительно промежуточного положения плавания обрабатывающего сельскохозяйственную культуру компонента;
причем поддерживающее устройство содержит:
по меньшей мере один гидравлический плавающий цилиндр;
гидравлическую систему, содержащую гидравлическую текучую среду под давлением;
электронную систему управления для подачи сигнала управления для изменения давления;
причем указанная электронная система управления выполнена с возможностью изменения давления так, что подъемное усилие от поддерживающего устройства уменьшается как при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх из указанного промежуточного положения плавания, так и при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вниз из указанного промежуточного положения плавания,
при этом указанная электронная система управления и указанный датчик в ответ на указанный сигнал выполнены с возможностью генерации значения, указывающего ускорение и/или скорость взаимодействующей с сельскохозяйственной культурой системы при указанном плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх и вниз, и изменения сигнала управления в ответ на указанное значение ускорения и/или скорости.
11. Машина для уборки сельскохозяйственной культуры по п. 10, в которой промежуточное положение плавания включает в себя область с каждой стороны от точки, причем в этой области подъемное усилие поддерживается постоянным.
12. Машина для уборки сельскохозяйственной культуры по любому из пп. 10, 11, в которой темп уменьшения подъемного усилия с одной стороны от промежуточного положения плавания отличается от темпа с другой стороны.
13. Машина для уборки сельскохозяйственной культуры по любому из пп. 10-12, в которой темп уменьшения подъемного усилия при перемещении обрабатывающего сельскохозяйственную культуру компонента вверх больше, чем при перемещении обрабатывающего сельскохозяйственную культуру компонента вниз.
14. Машина для уборки сельскохозяйственной культуры по любому из пп. 10-13, в которой уменьшение подъемного усилия пропорционально пройденному расстоянию.
15. Машина для уборки сельскохозяйственной культуры по любому из пп. 10-14, в которой клапанное устройство имеет характеристику, заключающуюся в том, что клапанное устройство действует для поддержания давления гидравлической текучей среды в камере на постоянном значении, причем это значение зависит от сигнала управления, подаваемого на клапанное устройство, во время изменений объема камеры, вызванных перемещением поршня.
16. Машина для уборки сельскохозяйственной культуры по любому из пп. 10-15, в которой указанная электронная система управления для выполнения указанных временных изменений запрограммирована с возможностью ответа на указанный сигнал перемещения, а не на изменения давления в камере, которые вызваны перемещением поршня.
17. Уборочный комбайн, содержащий:
несущее транспортное средство для перемещения по земле, причем транспортное средство имеет наклонную камеру для приема убранной сельскохозяйственной культуры;
жатку, включающую в себя систему срезания сельскохозяйственной культуры и по меньшей мере один взаимодействующий с землей компонент для обеспечения поддерживающего усилия от земли;
поддерживающее устройство, расположенное между наклонной камерой и жаткой для поддержания жатки так, что часть поддерживающего усилия для уравновешивания веса обрабатывающего сельскохозяйственную культуру компонента обеспечивается подъемным усилием от поддерживающего устройства, а оставшаяся часть обеспечивается взаимодействующим с землей компонентом за счет давления на землю;
причем поддерживающее устройство выполнено с возможностью поддержания обрабатывающего сельскохозяйственную культуру компонента для плавающего перемещения вверх и вниз относительно промежуточного положения плавания обрабатывающего сельскохозяйственную культуру компонента;
причем поддерживающее устройство содержит по меньшей мере один гидравлический плавающий цилиндр, гидравлическую систему, содержащую гидравлическую текучую среду под давлением, и электронную систему управления для подачи сигнала управления для изменения давления;
датчик, выполненный с возможностью подачи сигнала датчика в указанную электронную систему управления в ответ на перемещение обрабатывающего сельскохозяйственную культуру компонента при указанном плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх и вниз, причем указанная электронная система управления в ответ на указанный сигнал датчика выполнена с возможностью временного изменения сигнала управления для временного изменения прижимного давления;
причем электронная система управления выполнена с возможностью изменения давления так, что подъемное усилие от поддерживающего устройства уменьшается как при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх из промежуточного положения плавания, так и при плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вниз из указанного промежуточного положения плавания; и
при этом указанная электронная система управления и указанный датчик в ответ на указанный сигнал выполнены с возможностью генерации значения, указывающего ускорение и/или скорость взаимодействующей с сельскохозяйственной культурой системы при указанном плавающем перемещении обрабатывающего сельскохозяйственную культуру компонента вверх и вниз, и изменения сигнала управления в ответ на указанное значение ускорения и/или скорости.
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА | 2009 |
|
RU2511231C2 |
| ЖАТКА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1997 |
|
RU2118879C1 |
| Устройство виброизоляции маятниковой системы навески уборочных аппаратов | 1986 |
|
SU1319788A1 |

