Область техники, к которой относится изобретение
Настоящее изобретение относится к сельскохозяйственным транспортным средствам, а более конкретно к сельскохозяйственным уборочным машинам, оборудованным жаткой.
Уровень техники
Сельскохозяйственная уборочная машина, известная как «комбайн», называется так исторически, потому что она объединяет в едином уборочном блоке множество уборочных функций, таких как подбор, обмолот, разделение и очистка. Комбайн содержит жатку, которая убирает сельскохозяйственную культуру с поля, и приемную камеру, которая транспортирует растительный материал к обмолачивающему ротору. Обмолачивающий ротор вращается внутри перфорированного корпуса, который может быть в виде регулируемых секций подбарабанья, и выполняет операцию обмолота сельскохозяйственной культуры для извлечения зерна. После обмолота зерно падает через отверстия в секциях подбарабанья, и его перемещают на скатную доску. На скатной доске зерно чистят с использованием системы очистки, а затем перемещают в зерновой резервуар на комбайне. Система очистки содержит очистной вентилятор, который продувает воздух через колеблющиеся сита для удаления мякины и другого мусора в направлении задней части комбайна. Незерновой растительный материал, такой как солома, из секции обмолота проходит через измельчитель соломы из задней части комбайна. При заполнении зернового резервуара комбайн располагают рядом с транспортным средством, в которое необходимо выгрузить зерно, таким как полуприцеп, фургон для выгрузки зерна самотеком, однорамный грузовой автомобиль и тому подобное; и приводят в действие разгрузочную систему на комбайне для перемещения зерна в транспортное средство.
В комбайнах с жатками, которые жестко прикреплены к приемной камере комбайна, комбайн обычно оборудуют системой управления высотой жатки (УВЖ), которая регулирует высоту и угол наклона жатки относительно земли. Система УВЖ особенно важна для предотвращения контакта жатки с объектами в поле, когда комбайн убирает растительный материал, а также помогает удерживать режущее устройство жатки на требуемой высоте относительно земли для того, чтобы обеспечить требуемую уборку сельскохозяйственной культуры. Известные системы УВЖ содержат исполнительный механизм, связанный с рамой жатки, датчики, которые определяют высоту режущего устройства относительно земли, и контроллер, который управляет исполнительным механизмом на основе измеренной высоты режущего устройства. Одним типом датчика, который можно использовать, является датчик режущего аппарата, который контактирует с землей и на основе изгиба датчика определяет относительную высоту режущего устройства от земли. Известная проблема таких датчиков режущего аппарата состоит в том, что когда датчик режущего аппарата находится не на земле, система УВЖ не может точно определить, находится ли датчик режущего аппарата на два дюйма или на два фута над землей и, следовательно, не может надежно определить, как регулировать высоту и/или угол наклона жатки для возврата жатки в требуемое положение.
Некоторые жатки также содержат одно или более подпружиненных копирующих колес, которые остаются в контакте с землей и помогают сохранять уровень жатки, когда комбайн движется по полю. Одна конкретная проблема, с которой сталкиваются подобные копирующие колеса, возникает, когда жатка движется по земной поверхности с большой изрезанностью, что вызывает отклонение датчика режущего аппарата от земли и полное сжатие пружины копирующего колеса (колес). В такой ситуации смещающая сила от пружины к земле пытается поднять жатку, а вследствие жесткого соединения жатки с комбайном, комбайн от земли. Это дополнительно осложняется тем, что система УВЖ определяет, что датчик режущего аппарата находится не на земле и пытается опустить или наклонить жатку в направлении земли для того, чтобы вернуть датчик режущего аппарата и, таким образом, режущее устройство назад к земле. Суммарное действие этих одновременных движений может вызывать направление передней части жатки в землю, когда комбайн движется вперед, заставляя жатку зарываться в землю, и потенциально может нанести значительное повреждение жатке и комбайну.
В данной области необходима система УВЖ, которая может преодолевать некоторые из описанных ранее недостатков известных систем УВЖ.
Сущность изобретения
Согласно аспекту настоящего изобретения предложен датчик, связанный с копирующим колесом жатки, который в сочетании с датчиком режущего аппарата или отдельно может обеспечить более точное регулирование высоты и/или угла наклона жатки.
Согласно еще одному аспекту настоящего изобретения предложено сельскохозяйственное транспортное средство, содержащее шасси и систему жатки, поддерживаемую шасси. Система жатки содержит раму; режущий аппарат, поддерживаемый рамой; датчик режущего аппарата, связанный с режущим аппаратом и выполненный с возможностью выдачи сигнала высоты режущего аппарата; копирующее колесо, поддерживаемое рамой позади режущего аппарата; датчик колеса, связанный с копирующим колесом и выполненный с возможностью выдачи сигнала положения колеса; систему исполнительных механизмов, содержащую множество исполнительных механизмов, поддерживаемых шасси и выполненных с возможностью регулировки высоты и/или угла наклона рамы; и контроллер, электрически соединенный с датчиком высоты режущего аппарата, датчиком колеса и системой исполнительных механизмов. Контроллер выполнен с возможностью: приема сигнала высоты режущего аппарата; приема сигнала положения колеса; сравнения сигнала высоты режущего аппарата и сигнала положения колеса для определения наличия неровности рельефа; и включения по меньшей мере одного исполнительного механизма системы исполнительных механизмов для регулировки рамы в ответ на определение наличия неровности рельефа.
Согласно еще одному аспекту настоящего изобретения предложено сельскохозяйственное транспортное средство, содержащее шасси и систему жатки, поддерживаемую шасси. Система жатки содержит раму; режущий аппарат, поддерживаемый рамой; копирующее колесо, поддерживаемое рамой позади режущего аппарата; датчик колеса, связанный с копирующим колесом и выполненный с возможностью выдачи сигнала избыточной нагрузки на колесо, когда датчик колеса определяет смещение копирующего колеса к границе хода; систему исполнительных механизмов, содержащую множество исполнительных механизмов, поддерживаемых шасси и выполненных с возможностью регулировки высоты и/или угла наклона рамы; и контроллер, электрически соединенный с датчиком колеса и системой исполнительных механизмов. Контроллер выполнен с возможностью: определения сигнала избыточной нагрузки на колесо; и включения по меньшей мере одного исполнительного механизма системы исполнительных механизмов для регулировки рамы в ответ на прием сигнала избыточной нагрузки на колесо.
Преимущество описанного здесь сельскохозяйственного транспортного средства, состоит в том, что предоставление датчика положения колеса обеспечивает больше информации о рельефе, по которому движется жатка, для приема контроллером, обеспечивая более точное управление контроллером высотой и углом наклона жатки.
Еще одно преимущество сельскохозяйственного транспортного средства, описанного здесь, состоит в том, что информация от датчика режущего аппарата и датчика положения колеса позволяет контроллеру прогнозировать уклон земли, по которой движется жатка, и регулировать угол наклона и/или высоту жатки, соответственно.
Еще одно преимущество сельскохозяйственного транспортного средства, описанного здесь, состоит в том, что датчик колеса, подающий сигнал избыточной нагрузки на колесо, может обеспечить регулировку контроллером жатки таким образом, чтобы избегать ситуации, когда передняя часть жатки зарывается в землю и вызывает значительное повреждение жатки и/или комбайна.
Еще одно преимущество описанного здесь сельскохозяйственного транспортного средства состоит в том, что контроллер можно выполнить с возможностью регулировки одного или более исполнительных механизмов системы исполнительных механизмов в зависимости от того, как ориентированы режущий аппарат и/или копирующее колесо, для регулировки рамы в соответствии с конкретной ситуацией, которая вызвала изменение положения режущего аппарата и/или копирующего колеса.
Краткое описание чертежей
Упомянутые выше и другие признаки и преимущества этого изобретения и способ их получения станут более очевидны, а изобретение будет более хорошо понятно посредством ссылки на следующее описание иллюстративных вариантов осуществления изобретения, сделанное в сочетании с сопровождающими чертежами, на которых:
На фиг. 1 представлен вид сбоку иллюстративного варианта осуществления сельскохозяйственного транспортного средства, образованного согласно настоящему изобретению;
На фиг. 2 представлен вид сбоку сельскохозяйственного транспортного средства, показанного на фиг. 1, приближающегося к склону;
На фиг. 3 представлен вид сбоку движения сельскохозяйственного транспортного средства, показанного на фиг. 1-2, когда жатка транспортного средства движется вверх по склону;
На фиг. 4 представлен вид сбоку сельскохозяйственного транспортного средства, показанного на фиг. 1-3, когда жатка находится около верхней части склона;
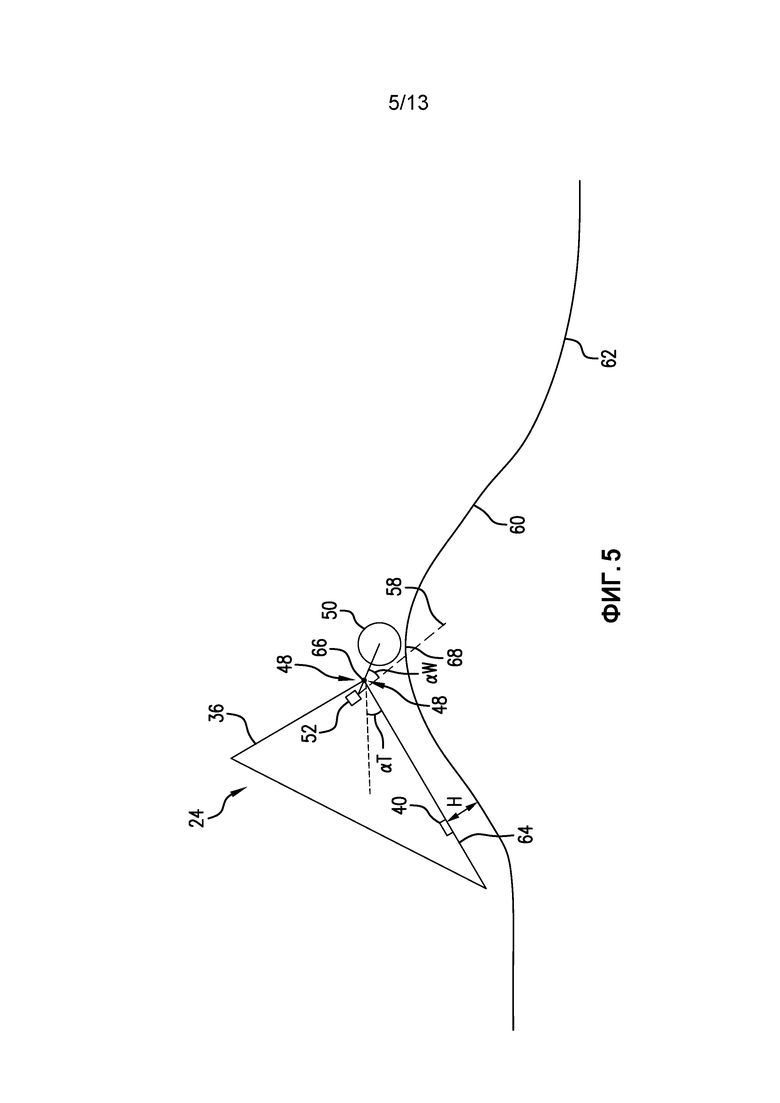
На фиг. 5 представлен вид сбоку сельскохозяйственного транспортного средства, показанного на фиг. 1-4, когда жатка спускается вниз по склону;
На фиг. 6 представлен вид сбоку сельскохозяйственного транспортного средства, показанного на фиг. 1-5, когда жатка приближается к нижней части склона;
На фиг. 7 представлена блок-схема, иллюстрирующая работу контроллера согласно иллюстративному варианту осуществления настоящего изобретения;
На фиг. 8 представлен вид сбоку сельскохозяйственного транспортного средства, показанного на фиг. 1, приближающегося к склону, с еще одним иллюстративным вариантом осуществления датчика колеса и контроллера;
На фиг. 9 представлен вид сбоку сельскохозяйственного транспортного средства, показанного на фиг. 8, когда жатка движется вверх по склону;
На фиг. 10 представлен вид сбоку сельскохозяйственного транспортного средства, показанного на фиг. 8-9, когда жатка находится около верхней части склона;
На фиг. 11 представлен вид сбоку сельскохозяйственного транспортного средства, показанного на фиг. 8-10, когда жатка спускается вниз по склону;
На фиг. 12 представлен вид сбоку сельскохозяйственного транспортного средства, показанного на фиг. 8-11, когда жатка приближается к нижней части склона; а
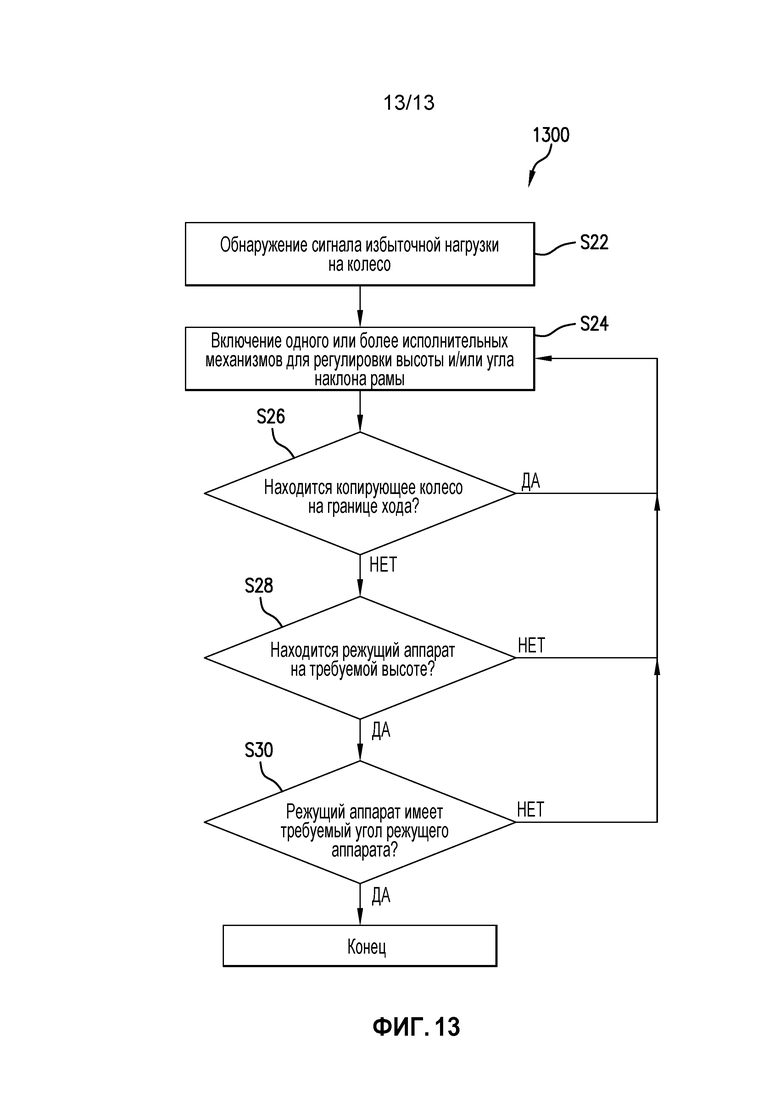
На фиг. 13 представлена блок-схема, иллюстрирующая работу контроллера согласно еще одному иллюстративному варианту осуществления настоящего изобретения.
Соответствующими ссылочными позициями обозначены соответствующие части на нескольких изображениях. Пояснения на примере, приведенные здесь, иллюстрируют варианты осуществления изобретения, и подобные пояснения на примере никоим образом не следует истолковывать, как ограничение объема изобретения.
Подробное описание изобретения
Далее со ссылкой на чертежи, а более конкретно на Фиг. 1, показан иллюстративный вариант осуществления сельскохозяйственной машины 20, образованной согласно настоящему изобретению, содержащей систему 22 управления высотой жатки (УВЖ), выполненную с возможностью управления регулировкой высоты и наклона жатки 24, находящейся на переднем конце 26 машины 20, когда машина 20 движется по поверхности 28 земли, как обозначено стрелкой F. Уборочной машиной 20 является типичный, самоходный уборочный комбайн, имеющий шасси 30, несущее традиционно выполненный и работающий двигатель и трансмиссию, которая приводит в движение гусеницы или колеса 32. Двигатель может приводить в действие режущий аппарат 40 жатки 24, который может включать традиционно выполненный и работающий ножевой режущий аппарат, дисковые режущие аппараты и тому подобное, а также мотовило 41 и подбирающее устройство 44, которое в данном случае представляет собой полотенную ленточную систему, но может быть шнековое устройство, которые все выполнены и работают традиционно.
Центральную область жатки 24 поддерживает на машине 20 подающий транспортер 46, передний конец которого можно двигать вверх и вниз относительно машины 20 для установки высоты режущего аппарата 40, обозначенной на Фиг. 1 высотой H. Затем срезанные растения будут падать на пол или доску жатки 24 с помощью мотовила 42 и проходить на подбирающее устройство 44. Затем устройство 44 перемещает срезанные растения во впускное отверстие подающего транспортера 46, которое будет вводить срезанные растения и перемещать их внутрь насквозь в машину 20 для обработки, все обычным, хорошо известным образом.
Для управления высотой, боковым наклоном и продольным наклоном жатки 24 шасси 30 несет систему 34 исполнительных механизмов с исполнительными механизмами 34A, 34B и 34C, которые могут быть связаны с рамой 36 жатки 24 и/или с подающим транспортером 46. Один или более 34A, 34B, 34C исполнительных механизмов при необходимости также можно установить на шасси 30. Исполнительными механизмами 34A, 34B, 34C могут быть пневматические или гидравлические цилиндры или другие типы исполнительных механизмов, которые прикладывают силы к раме 36, или компонент, соединенный с рамой 36, такой как подающий транспортер 46, для того, чтобы поднимать, опускать и наклонять жатку 24 обычным образом. Система 34 исполнительных механизмов может содержать, например, исполнительный механизм 34A высоты, который выполнен с возможностью вертикального подъема и опускания рамы 36 для регулировки высоты жатки 24; исполнительный механизм 34B бокового наклона, который выполнен с возможностью регулировки бокового наклона рамы 36, т.е. наклона жатки 24 из стороны в сторону относительно направления F вперед; и продольный исполнительный механизм 34C, который выполнен с возможностью регулировки продольного наклона рамы 36, т.е. наклона жатки 24 вперед-назад относительно направления F вперед. Должно быть понятно, что ссылка на «наклонить» и «наклон» жатки 24 здесь может относиться как к боковому, так и к продольному наклону, если указан только один из видов наклона. Система 34 исполнительных механизмов электрически соединена с контроллером 38, который посылает сигналы в исполнительные механизмы 34A, 34B, 34C для того, чтобы управлять работой 34A, 34B, 34C исполнительных механизмов. В рамках изобретения контроллер 38 «электрически соединен» с системой 34 исполнительных механизмов в том смысле, что контроллер 38 электрически соединен с каждым исполнительным механизмом 34A, 34B, 34C системы 34 исполнительных механизмов, поэтому контроллер 38 может включать каждый исполнительный механизм 34A, 34B, 34C. Систему 34 исполнительных механизмов и контроллер 38 можно выполнить так, чтобы контроллер 38 мог включать каждый исполнительный механизм 34A, 34B, 34C системы 34 исполнительных механизмов независимо от других исполнительных механизмов. Контроллер 38 может содержать, например, электрический контур обработки или центральный блок обработки и память, которые позволяют контроллеру 38 посылать и принимать электрические сигналы для управления разными компонентами транспортного средства 20, которые будут описаны здесь дальше. В случае пневматических или гидравлических цилиндров контроллер 38, как известно, может управлять одним или более клапанами (не показано) цилиндра для наполнения или выпуска текучей среды изнутри цилиндра. Должно быть понятно, что можно использовать другие типы 34A, 34B, 34C исполнительных механизмов, а не цилиндры, такие как исполнительные механизмы с электроприводом, в каком случае контроллер 38 будет управлять механизмом, который вызывает выдвижение и втягивание 34A, 34B, 34C исполнительных механизмов. Должно быть понятно, что хотя показана и описана система 34 исполнительных механизмов, содержащая три исполнительных механизма 34A, 34B и 34C, для управления положением рамы 36 система 34 исполнительных механизмов может иметь два исполнительных механизма или может иметь более, чем три исполнительных механизма.
Контроллер 38 также электрически соединен с датчиком 42 режущего аппарата, связанным с режущим аппаратом 40, и датчиком 48 колеса, связанным с копирующим колесом 50, которое поддерживает рама 36 позади режущего аппарата 40. Датчик 42 режущего аппарата определяет высоту H режущего аппарата 40 относительно поверхности 28 земли за счет контакта с поверхностью 28 земли и изгиба. В зависимости от изгиба датчика 42 режущего аппарата датчик 42 режущего аппарата посылает в контроллер 38 сигнал высоты режущего аппарата, который может иметь величину, показывающую высоту H режущего аппарата 40 относительно поверхности 28 земли. Для поддержания режущего аппарата 40 на требуемой высоте H относительно поверхности 28 земли контроллер 38 может иметь хранящееся в нем требуемое значение сигнала высоты режущего аппарата. Когда принятый сигнал высоты режущего аппарата не совпадает со значением требуемой высоты, контроллер 38 может включать один или более исполнительных механизмов 34A, 34B, 34C, чтобы поднимать, опускать или наклонять раму 36 в зависимости от значения принятого сигнала высоты режущего аппарата, поэтому режущий аппарат 40 принимает требуемую высоту и ориентацию относительно поверхности 28 земли.
На плоских поверхностях 28 земли, таких как поверхности 28 земли, показанные на Фиг. 1, для точного управления высотой H режущего аппарата 40 достаточно датчика 42 режущего аппарата. Однако, когда поверхность земли не является ровной, например, когда транспортное средство 20 движется поперек склона, могут возникать некоторые ситуации, когда датчик 42 режущего аппарата не передает в контроллер 38 достаточно информации для точного управления высотой H и углом наклона жатки 24. чтобы лучше следовать рельефу такой поверхности земли, жатка 24 также содержит датчик 48 колеса, который связан с копирующим колесом 50. Датчик 48 колеса может содержать крепление 52, соединенное с рамой 36 жатки 24, а также рычаг 54, соединяющий копирующее колесо 50 с креплением 52. Чтобы обеспечить регулировку копирующего колеса 50 по изменениям высоты рельефа по мере движения транспортного средства 20, рычаг 54 можно шарнирно соединить с креплением 52, поэтому копирующее колесо 50 может поворачиваться во время движения относительно крепления 52. Для удерживания копирующего колеса 50 в зацеплении с поверхностью 28 земли по мере движения транспортного средства 20 в направлении F вперед с рычагом 54 можно соединить пружину 56, которая смещает копирующее колесо 50 в направлении поверхности 28 земли.
В одном иллюстративном варианте осуществления, образованном согласно настоящему изобретению, и далее со ссылкой на Фиг. 2, датчик 48 колеса выполнен с возможностью выдачи в контроллер 38 сигнала положения колеса, который соответствует положению копирующего колеса 50, либо линейному, либо угловому, относительно крепления 52. Для облегчения показа жатка 24 проиллюстрирована на фиг. 2-11 с простой треугольной формой. Как показано здесь, сигналом положения колеса является сигнал угла колеса, соответствующий углу αW колеса, но должно быть понятно, что сигналом положения колеса также может быть линейный сигнал положения колеса, соответствующий высоте копирующего колеса 50 или другому параметру, показывающему линейное положение копирующего колеса 50, такому как сила, накопленная в пружине 56. Угол αW колеса можно, например, определить по текущему угловому положению рычага 54 относительно крепления 52 и нейтральному положению рычага 54, причем большая величина сигнала угла колеса соответствует большему углу αW колеса. Нейтральным положением рычага 54, проиллюстрированным на Фиг. 2 пунктирной линией 58, может быть любое угловое положение рычага 54 относительно крепления 52, например, угловое положение рычага 54, когда жатка 24 находится на плоской поверхности земли.
Как показано на Фиг. 2, угол αW колеса, определяемый датчиком 48 колеса, составляет приблизительно 0°, поскольку текущее угловое положение рычага 54 перекрывает нейтральное угловое положение 58 рычага 54. Чтобы обеспечить выявление контроллером 38 неполадок датчика 48 колеса, датчик 48 можно выполнить так, чтобы сигнал угла колеса, посылаемый в контроллер 38, имел небольшую величину, например, 0,5 В, когда угол αW колеса составляет 0°. Величину сигнала угла колеса, посылаемого датчиком 48 колеса в контроллер 38, можно пропорционально увеличивать от 0,5 В, обозначая угол αW колеса 0°, причем контроллер 38 определяет угол αW колеса на основе принятой величины сигнала угла колеса. Должно быть понятно, что ранее описанный пример того, как контроллер 38 определяет угол αW колеса на основе сигнала угла колеса от датчика 48 колеса, является только иллюстративным, и контроллер 38 и датчик 48 колеса можно выполнить любым способом, подходящим для определения изменений относительного угла копирующего колеса 50 по мере движения транспортного средства 20 по полю.
Также со ссылкой на Фиг. 2, можно видеть, что жатка 24 приближается к склону 60, образованному на поверхности 62 земли, по которой движется жатка 24. Режущий аппарат 40, который может находиться на передней части 64 рамы 36, и копирующее колесо 50, находящееся позади режущего аппарата 40, имеют разное расстояние относительно направления F вперед между ними. Вследствие этого разного расстояния режущий аппарат 40 и копирующее колесо 50 могут двигаться по двум разным уклонам на поверхности 62 земли. Так как датчик 42 режущего аппарата связан с режущим аппаратом 40, датчик 42 режущего аппарата будет двигаться в общем по участкам поверхности 62 земли с таким же уклоном, что и режущий аппарат 40. Как можно видеть на Фиг. 2, датчик 42 режущего аппарата начинает сгибаться вследствие контакта с уклоном склона 60, хотя угол αW колеса копирующего колеса 50 все еще составляет 0° вследствие того, что копирующее колесо 50 находится на плоской поверхности. Так как датчик 42 режущего аппарата начинает сгибаться, датчик 42 режущего аппарата может посылать в контроллер 38 сигнал высоты режущего аппарата с величиной означающей, что высота H режущего аппарата 40 относительно поверхности 62 земли уменьшилась. Контроллер 38, определяя, что высота H режущего аппарата 40 уменьшилась, затем сравнивает принятый сигнал высоты режущего аппарата с принятым сигналом угла колеса для определения корректирующего действия, которое необходимо предпринять для предотвращения зарывания передней части 64 рамы 36 в уклон склона 60.
Для определения, что имеется неровность рельефа, такая как склон 60, контроллер 38 может сравнивать принятый сигнал высоты режущего аппарата с принятым сигналом угла колеса для определения разницы величины, причем определенная разница означает, что имеется неровность рельефа 60. Для упрощения определения, имеется ли неровность рельефа, датчик 42 режущего аппарата и датчик 48 колеса можно выполнить с возможностью выдачи в контроллер 38 их соответствующих сигналов одинаковой величины, когда жатка 24 находится на плоской поверхности и на требуемой высоте режущего аппарата 40. Это позволяет контроллеру 38 легко определить наличие неровности рельефа путем определения наличия разницы величин сигнала высоты режущего аппарата и сигнала угла колеса, причем контроллер 38 тогда предпринимает корректирующее действие на основе характеристики разницы между сигналами. Должно быть понятно, что разница величин между сигналом высоты режущего аппарата и сигналом угла колеса не должна быть нулевой, когда режущий аппарат 40 находится на требуемой высоте на плоской поверхности; при условии, что контроллер 38 может определить наличие отклонения от базовой разницы между величинами сигнала высоты режущего аппарата и сигнала угла колеса, контроллер 38 может определить наличие неровности рельефа. Кроме того, следует иметь в виду, что хотя на фиг. 2-6 показан склон 60, находящийся в передней части жатки 24, контроллер 38, используя те же общие принципы, также может определить, сталкиваются ли с неровностью рельефа, например, ведущие колеса 32 машины 20, и, соответственно, отрегулировать положение жатки 24.
В ситуации, показанной на Фиг. 2, контроллер 38 может определить, что в результате наличия разницы в сигнале датчика высоты режущего аппарата и сигнале угла колеса имеется неровность рельефа 60. После определения наличия неровности рельефа 60 контроллер 38 затем определяет, какой из указанных исполнительных механизмов 34A, 34B, 34C включить и каким образом, чтобы жатка 24 следовала контуру поверхности 62 земли. Контроллер 38 может, например, определить, что так как сигнал угла колеса обозначает, что угол αW колеса составляет 0°, разница должна быть обусловлена уменьшением высоты H режущего аппарата 40 относительно поверхности 62 земли. Для компенсации этого изменения на поверхности 62 земли вследствие неровности рельефа 60 контроллер 38 может включить продольный исполнительный механизм 34C для наклона жатки 24 в продольном направлении таким образом, чтобы изменить продольный угол αT наклона жатки 24 относительно точки 66 поворота от угла αT продольного наклона, показанного на Фиг. 2, до угла αT продольного наклона, показанного на Фиг. 3. Должно быть понятно, что если на наклон жатки 24 из стороны в сторону влияет неровность рельефа 60, контроллер 38, как известно, также может включить исполнительный механизм 34B бокового наклона для компенсации изменения наклона из стороны в сторону.
Далее со ссылкой на Фиг. 3 можно увидеть, что жатка 24 наклонена продольным исполнительным механизмом 34C с иным углом αT продольного наклона, чем угол αT продольного наклона, показанный на Фиг. 2. угол αT продольного наклона, показанный на Фиг. 3, лучше соответствует степени неровности рельефа 60, поэтому передняя часть 64 рамы 36 не зарывается в землю при неровности рельефа 60. При этом, копирующее колесо 50 поднимается с поверхности 62 земли вследствие изменения угла αT продольного наклона, вызывая изменение угла αT колеса 50 вследствие уменьшения нагрузки копирующего колеса 50, приводящего к изменению величины сигнала угла колеса, посылаемого датчиком 48 колеса в контроллер 38. Контроллер 38 может принять сигнал угла колеса и обнаружив изменение сигнала угла колеса, определить, какой, если нужно, из исполнительных механизмов 34A, 34B, 34C включить для того, чтобы в ответ наклонить и/или поднять жатку 24. Контроллер 38 можно выполнить с возможностью, например, сохранения, что жатка 24 в настоящее время наклонена продольным исполнительным механизмом 34C, и следовательно определения, что для вертикального опускания жатки 24 можно включить исполнительный механизм 34A высоты, так чтобы копирующее колесо 50 снова контактировало с поверхностью 62 земли. Контроллер 38, например, можно выполнить с возможностью вертикального опускания копирующего колеса 50 в случае, когда сигнал угла колеса обозначает, что копирующее колесо 50 не находится на поверхности 62 земли, и продольный исполнительный механизм 34C был включен для наклона жатки 24 в течение заданного интервала времени наклона, например, 3-5 секунд. Должно быть понятно, что подобная конфигурация является только иллюстративной, и контроллер 38 можно выполнить с возможностью иного ответа на подъем копирующего колеса 50 от земли 62. Кроме того, следует иметь в виду, что контроллер 38 можно выполнить с возможностью включения одного или более исполнительных механизмов 34A, 34B, 34C на основе того, как предыдущее включение одного или более исполнительных механизмов 34A, 34B, 34C влияло на угол αW копирующего колеса 50.
Далее со ссылкой на фиг. 4-6, на Фиг. 4 можно видеть, что жатка 24 продвинулась так, что датчик 42 режущего аппарата продвинулся мимо верхней части 68 неровности рельефа 60, а датчик 42 режущего аппарата и датчик 48 колеса находятся на противоположных сторонах верхней части 68 неровности рельефа 60, т.е. датчик 42 режущего аппарата начинает опускаться по неровности рельефа 60, в то время как датчик 48 колеса все еще поднимается по неровности рельефа 60. В такой ситуации контроллер 38 можно выполнить с возможностью определения, что жатка 24 проходит по верхней части 68 неровности рельефа 60, как показано на Фиг. 5, и регулировки угла αT продольного наклона жатки 24 для соответствия уклону неровности рельефа 60 без зарывания какой-либо части жатки 24 в поверхность 62 земли. Когда жатка 24 затем спускается по неровности рельефа 60, как показано на фиг. 5-6, контроллер 38 может определить изменение сигнала высоты режущего аппарата и сигнала угла колеса для того, чтобы включить один или более исполнительных механизмов 34A, 34B, 34C и управлять вертикальным движением и/или наклоном жатки 24 для сохранения высоты H режущего аппарата 40 и угла αC режущего аппарата 40 относительно поверхности 62 земли более постоянным за счет обнаружения и следования контуру неровности рельефа 60. В большинстве условий угол αC режущего аппарата в идеале будет составлять 8-20° относительно поверхности 62 земли, как показано на Фиг. 5. Следовательно, контроллер 38 можно выполнить с возможностью сохранения высоты H и угла αC режущего аппарата 40 с соответственно требуемыми значениями, которые будут варьировать в зависимости от убираемой сельскохозяйственной культуры, и которые можно запрограммировать в контроллер 38, за счет соответствующего включения при необходимости одного или более исполнительных механизмов 34A, 34B, 34C.
Следовательно, необходимо иметь в виду, что контроллер 38 жатки 24, показанной на фиг. 2-6, можно выполнить с возможностью сравнения сигнала высоты режущего аппарата от датчика режущего аппарата 40 и сигнала угла колеса от датчика 48 колеса для определения наличия неровности рельефа и включения одного или более исполнительных механизмов 34A, 34B, 34C, соответственно, поэтому жатка 24 не контактирует с неровностью рельефа. Кроме того, следует иметь в виду, что контроллер 38 можно выполнить многими способами для выявления разницы сигнала высоты режущего аппарата и сигнала угла колеса и надлежащего включения в ответ одного или более исполнительных механизмов 34A, 34B, 34C, в зависимости от конфигурации сельскохозяйственного транспортного средства 20. Кроме того, контроллер 38 можно выполнить с возможностью учета других факторов, таких как скорость транспортного средства 20 и скорость изменения угла αW колеса, для определения, какой из исполнительных механизмов 34A, 34B, 34C включить для того, чтобы избежать повреждения жатки 24, а также прогноза характеристик рельефа в передней части жатки 24 по мере движения транспортного средства 20 вперед.
Далее со ссылкой на Фиг. 7 показана блок-схема, демонстрирующая иллюстративный способ 700, выполняемый контроллером 38, согласно настоящему изобретению. Как можно видеть, контроллер 38 принимает S10 сигнал высоты режущего аппарата, а также принимает S12 сигнал угла колеса. Контроллер 38 сравнивает S14 сигнал высоты режущего аппарата и сигнал угла колеса для определения наличия неровности рельефа, например, путем определения S16, превышает ли разница между величиной сигнала высоты режущего аппарата и сигнала угла колеса заданное значение. Если контроллер 38 определяет наличие неровности рельефа, контроллер 38 в ответ включает S18 один или более исполнительных механизмов 34A, 34B, 34C для регулировки рамы 36 жатки 24. Контроллер 38 также можно выполнить с возможностью определения S20, находится ли режущий аппарат 40 на требуемой высоте режущего аппарата и под требуемым углом режущего аппарата относительно поверхности 62 земли, и если нет, включения S18 одного или более исполнительных механизмов 34A, 34B, 34C для регулировки рамы 36 и возврата режущего аппарата 40 к требуемой высоте режущего аппарата и требуемому углу режущего аппарата, т.е. сохранения требуемой высоты режущего аппарата и требуемого угла режущего аппарата 40.
Далее со ссылкой на фиг. 8-12 показана жатка 24, движущаяся по такой же неровности рельефа 60, которая показана на фиг. 2-6. Однако, жатка 24 содержит датчик 148 колеса, который, хотя и сконструирован аналогично датчику 48 колеса, показанному на фиг. 2-6, не определяет изменения угла αW копирующего колеса 50 для выдачи сигнала угла колеса, как ранее описанный датчик 48 колеса. Вместо этого датчик 148 колеса выполнен с возможностью выдачи сигнала избыточной нагрузки на колесо в контроллер 138, когда датчик 148 колеса определяет, что копирующее колесо 50 линейно и/или под углом смещено к границе хода, обозначенной линией 102 на фиг. 8-12, из нейтрального положения, обозначенного линией 104 на фиг. 8-12. При обнаружении контроллером 138 сигнала избыточной нагрузки на колесо, контроллер 138 может в ответ включить один или более исполнительных механизмов 34A, 34B, 34C для регулировки рамы 36 жатки 24. В этом смысле датчик 148 колеса выполнен в виде датчика избыточной нагрузки, подающего сигнал избыточной нагрузки на колесо, только когда копирующее колесо 50 смещается линейно и/или под углом к границе хода 102. Копирующее колесо 50, например, поворачиваясь к границе хода 102, обозначает лишний поворот копирующего колеса 50, вызывающий излишнее сжатие пружины 56 (показано на Фиг. 1) копирующего колеса 50, что приводит к попытке разжимания пружины 56 и возможному подъему транспортного средства 20 в процессе. На фиг. 8-11 можно видеть, что копирующее колесо 50 не достигло границы 102 хода. Однако, как показано на Фиг. 12, могут быть ситуации, когда копирующее колесо 50 повернуто к границе 102 хода, а датчик режущего аппарата 40 находится не на поверхности 62 земли. В известных системах УВЖ датчик режущего аппарата, поднимаемый от поверхности земли, будет обычно вызывать опускание жатки контроллером системы УВЖ, что может приводить к ситуации, когда жатка и/или транспортное средство сильно повреждается, когда пружина 56 копирующего колеса подвергается избыточному сжатию.
В иллюстративном варианте осуществления настоящего изобретения подобной ситуации можно избежать вследствие подачи датчиком 148 колеса сигнала избыточной нагрузки на колесо в контроллер 138 при достижении копирующим колесом 50 границы 102 хода. Датчик 148 колеса может подавать сигнал избыточной нагрузки на колесо, когда, например, текущее угловое положение рычага 154 датчика 148 колеса относительно крепления 152 датчика 148 колеса достигает положения избыточной нагрузки на копирующее колесо относительно крепления 152, что означает, что копирующее колесо 50 достигло граница 102 хода. При обнаружении контроллером 138 сигнала избыточной нагрузки на колесо, контроллер 138 включает один или более исполнительных механизмов 34A, 34B, 34C, поднимая и/или наклоняя раму 36 жатки 24, поэтому копирующее колесо 50 поворачивается в положение перед границей 102 хода. Например, как показано на Фиг. 12, контроллер 138 можно выполнить с возможностью включения в ответ исполнительного механизма 34A высоты, поэтому копирующее колесо 50 поворачивается в угловое положение перед границей 102 хода, избегая избыточного сжатия пружины 56 копирующего колеса 50, т.е. копирующее колесо 50 более не смещено к границе 102 хода. Хотя эта последовательность может приводить к временному увеличению высоты H режущего аппарата 40 относительно поверхности 62 земли выше требуемого уровня, подобное временное увеличение является более хорошим выходом, чем существенное повреждение, которое может произойти при опускании рамы 36, в то время, когда копирующее колесо 50 повернуто к границе 102 хода.
Для обеспечения возврата режущего аппарата 40 на требуемую высоту и угол режущего аппарата после обнаружения контроллером 138 сигнала избыточной нагрузки на колесо, контроллер 138 также можно соединить с датчиком 42 режущего аппарата. Контроллер 138 также можно выполнить с возможностью сохранения требуемой высоты режущего аппарата 40 относительно поверхности 62 земли, которую можно сравнить с текущей высотой H режущего аппарата 40, измеренной датчиком 42 режущего аппарата, а также требуемого угла режущего аппарата 40 относительно поверхности 62 земли, который можно сравнить с текущим углом αC режущего аппарата относительно поверхности 62 земли. При обнаружении контроллером 138, что текущая высота H не равна требуемой высоте режущего аппарата, и/или текущий угол αC режущего аппарата не равен требуемому углу режущего аппарата, контроллер 138 может определить, имеется ли сигнал избыточной нагрузки на колесо. Если сигнал избыточной нагрузки на колесо отсутствует, контроллер 138 может включить один или более надлежащих исполнительных механизмов 34A, 34B, 34C для наклона и/или вертикального движения рамы 36 жатки 24 для приведения текущей высоты H и/или текущего угла αC режущего аппарата 40, соответственно, к требуемым значениям. Если контроллер 138 определяет сигнал избыточной нагрузки на колесо при попытке возврата режущего аппарата 40 к требуемой высоте режущего аппарата и/или требуемому углу режущего аппарата, контроллер 138 может в ответ включить один или более надлежащих исполнительных механизмов 34A, 34B, 34C для предотвращения избыточного сжатия пружины 56. Контроллер 138 тогда снова может пытаться возвращать режущий аппарат 40 к требуемой высоте режущего аппарата и/или к требуемому углу режущего аппарата до тех пор, пока текущая высота H и текущий угол αC режущего аппарата 40 не будут равны требуемой высоте режущего аппарата и требуемому углу режущего аппарата, соответственно, а контроллером 138 не будет определять сигнал избыточной нагрузки на колесо.
Далее со ссылкой на Фиг. 13 показана блок-схема, показывающая иллюстративный способ 1300, выполняемый контроллером 138, согласно настоящему изобретению. Когда копирующее колесо 50 достигает границы 102 хода, датчик 148 колеса может подавать сигнал избыточной нагрузки на колесо, при этом контроллер 138 обнаруживает S22 сигнал избыточной нагрузки на колесо. Контроллер 138 тогда может включить S24 один или более исполнительных механизмов 34A, 34B, 34C в ответ на прием сигнала избыточной нагрузки на колесо для того, чтобы регулировать высоту и/или угол наклона рамы 36 жатки 24, что регулирует высоту и/или угол наклона режущего аппарата 40. После включения S24 одного или более исполнительных механизмов 34A, 34B, 34C контроллер 138 может определить S26, находится ли копирующее колесо 50 все еще на границе 102 хода после регулировки высоты и/или угла наклона рамы 36. Если после регулировки высоты и/или угла наклона контроллер 138 определяет, что копирующее колесо 50 все еще находится на границе 102 хода, контроллер 138 может снова включить S24 один или более исполнительных механизмов 34A, 34B, 34C для регулировки высоты и/или угла наклона рамы 36, повторяя при необходимости до тех пор, пока копирующее колесо 50 больше не будет находиться на границе 102 хода. Контроллер 138 также можно выполнить с возможностью сохранения требуемой высоты режущего аппарата 40 и определения S28, находится ли режущий аппарат 40 на требуемой высоте, путем приема сигналов от датчика 42 режущего аппарата, связанных с режущим аппаратом 40. Если режущий аппарат 40 не находится на требуемой высоте, контроллер 138 может включить S24 один или более исполнительных механизмов 34A, 34B, 34C для регулировки высоты и/или угла наклона рамы 36 для размещения режущего аппарата 40 на требуемой высоте. Хотя контроллер 138 включает S24 один или более исполнительных механизмов 34A, 34B, 34C для возврата режущего аппарата 40 на требуемую высоту, контроллер 138 также может постоянно определять S26, находится ли копирующее колесо 50 на границе 102 хода, при этом контроллер 138 устанавливает приоритет удерживания копирующего колеса 50 ниже границы 102 хода выше регулировки высоты режущего аппарата 40 до требуемой высоты путем включения S24 одного или более исполнительных механизмов 34A, 34B, 34C. Аналогично, контроллер 138 также может сохранять требуемый угол режущего аппарата и быть выполнен с возможностью определения S30, имеет ли режущий аппарат 40 требуемый угол режущего аппарата. Если режущий аппарат 40 не имеет требуемого угла режущего аппарата, контроллер 138 можно выполнить с возможностью включения S24 одного или более исполнительных механизмов 34A, 34B, 34C для регулировки угла наклона и/или высоты рамы 36 до тех пор, пока режущий аппарат 40 не будет иметь требуемый угол режущего аппарата. Хотя контроллер 138 включает S24 один или более исполнительных механизмов 34A, 34B, 34C для возврата режущего аппарата 40 к требуемому углу режущего аппарата, контроллер 138 также может постоянно определять S26, находится ли копирующее колесо 50 на границе 102 хода, при этом контроллер 138 устанавливает приоритет удерживания копирующего колеса 50 ниже границы 102 хода выше регулировки угла режущего аппарата до требуемого угла режущего аппарата за счет активации S24 исполнительного механизма (механизмов) 34A, 34B, 34C. Следовательно, необходимо иметь в виду, что контроллер 138 можно выполнить многими способами, чтобы избежать существенного повреждения жатки 24 и/или транспортного средства 20 за счет регулировки системы 34 исполнительных механизмов для предотвращения достижения копирующим колесом 50 границы 102 хода, сохраняя в то же время также рабочее положение и ориентацию режущего аппарата 40 на требуемом уровне.
Следует понять, что этапы способов 700 и 1300 выполняет их соответствующий контроллер 38, 138 при загрузке и выполнении кода или команд программного обеспечения, которые материально хранятся на материальном машиночитаемом носителе, например, на магнитном носителе, таком как жесткий диск компьютера, оптическом носителе, таком как оптический диск, твердотельном запоминающем устройстве, таком как флеш-память, или другом носителе для хранения информации, известном в данной области. Таким образом, любая из функций, выполняемых контроллером 38, 138, описанным здесь, например, в способах 700 и 1300, реализована в виде кода или команд программного обеспечения, которые материально хранятся на материальном машиночитаемом носителе. При загрузке и выполнении подобного кода или команд программного обеспечения контроллером 38, 138, контроллер 38, 138 может выполнять любую функцию контроллера 38, 138, описанную здесь, включая любые этапы способов 700 и 1300, описанных здесь.
Термин «код программного обеспечения» или «код», используемый здесь, относится к любым командам или набору команд, которые влияют на работу компьютера или контроллера. Они могут существовать в выполняемом компьютером виде, таком как машинный код, который представляет собой набор команд и данных, непосредственно выполняемых центральным блоком обработки или контроллером компьютера, понятном человеку виде, таком как исходный код, который может быть скомпилирован для выполнения центральным блоком обработки или контроллером компьютера, или в промежуточном виде, таком как объектный код, который создается компилятором. В рамках изобретения термин «код программного обеспечения» или «код» также содержит любые понятные человеку компьютерные команды или набор команд, например, скрипт, которые могут выполняться по ходу работу с помощью интерпретатора, выполняемого центральным блоком обработки или контроллером компьютера.
Хотя это изобретение было описано в отношении по меньшей мере одного варианта осуществления, настоящее изобретение можно дополнительно модифицировать в рамках сущности и объема настоящего изобретения. Следовательно, настоящей изобретение охватывает любые варианты, варианты применения или адаптации изобретения с использованием его общих принципов. Кроме того, настоящее изобретение охватывает такие отклонения от настоящего раскрытия, которые попадают в пределы известной или общепринятой практики в области, к которой относится это изобретение, и которые попадают в рамки ограничений приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ПАРАМЕТРОМ УБОРОЧНОЙ ЖАТКИ | 2019 |
|
RU2747303C2 |
| Устройство автоматического регулирования высоты среза | 1990 |
|
SU1797781A1 |
| СРЕДСТВО РЕГУЛИРОВАНИЯ ВЫСОТЫ ЖАТКИ С КОМПЕНСАЦИЕЙ ПРОГИБА ШИН | 2012 |
|
RU2607104C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ТЕХНИКИ | 2004 |
|
RU2282971C2 |
| ПЛАВАЮЩАЯ СИСТЕМА ЖАТКИ ДЛЯ ИСПОЛЬЗОВАНИЯ С СЕЛЬСКОХОЗЯЙСТВЕННЫМ ВИНДРОУЭРОМ ИЛИ КОМБАЙНОМ | 2009 |
|
RU2504946C2 |
| МАШИНА ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ С ПЛАВАЮЩЕЙ СИСТЕМОЙ НА ГИДРАВЛИЧЕСКИХ ЦИЛИНДРАХ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ (ВАРИАНТЫ) | 2017 |
|
RU2749775C1 |
| МАШИНА ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ С ПЛАВАЮЩЕЙ СИСТЕМОЙ НА ГИДРАВЛИЧЕСКИХ ЦИЛИНДРАХ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ | 2017 |
|
RU2762837C1 |
| СПОСОБ РЕГУЛИРОВКИ ГЛУБИНЫ ОБРАБОТКИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ОРУДИЯ | 2020 |
|
RU2735246C1 |
| УПРАВЛЕНИЕ ВЫСОТОЙ МОТОВИЛА ДЛЯ ГИБКОЙ ПЛАТФОРМЕННОЙ ЖАТКИ В СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНЕ | 2007 |
|
RU2454061C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ДЛЯ УБОРОЧНОГО РАБОЧЕГО ОРГАНА | 2019 |
|
RU2786639C2 |











Сельскохозяйственное транспортное средство содержит шасси и систему жатки, поддерживаемую шасси. Система жатки содержит режущий аппарат, поддерживаемый рамой, датчик режущего аппарата, связанный с режущим аппаратом, который подает сигнал высоты режущего аппарата, копирующее колесо, поддерживаемое рамой позади режущего аппарата, датчик колеса, связанный с копирующим колесом, который подает сигнал положения колеса, систему исполнительных механизмов, содержащую исполнительные механизмы, которые могут регулировать высоту и/или угол наклона рамы, и контроллер, электрически соединенный с датчиком высоты режущего аппарата, датчиком колеса и системой исполнительных механизмов. Контроллер выполнен с возможностью приема сигнала высоты режущего аппарата, приема сигнала положения колеса, сравнения сигнала высоты режущего аппарата и сигнала положения колеса для определения наличия неровности рельефа и включения одного или более исполнительных механизмов для регулировки рамы в ответ на определение наличия неровности рельефа. Изобретение позволит повысить точность регулирования положения жатки относительно поверхности почвы. 2 н. и 13 з.п. ф-лы, 13 ил.
1. Сельскохозяйственное транспортное средство, содержащее:
шасси; и
систему жатки, поддерживаемую указанным шасси, причем указанная система жатки содержит:
раму;
режущий аппарат, поддерживаемый указанной рамой;
датчик режущего аппарата, связанный с указанным режущим аппаратом и выполненный с возможностью выдачи сигнала высоты режущего аппарата;
копирующее колесо, поддерживаемое указанной рамой позади указанного режущего аппарата;
датчик колеса, связанный с указанным копирующим колесом и выполненный с возможностью выдачи сигнала положения колеса;
систему исполнительных механизмов, содержащую множество исполнительных механизмов, поддерживаемых указанным шасси и выполненных с возможностью регулировки высоты и/или угла наклона указанной рамы; и
контроллер, электрически соединенный с указанным датчиком высоты режущего аппарата, указанным датчиком колеса и указанной системой исполнительных механизмов, причем указанный контроллер выполнен с возможностью:
приема указанного сигнала высоты режущего аппарата;
приема указанного сигнала положения колеса;
сравнения указанного сигнала высоты режущего аппарата и указанного сигнала положения колеса для определения наличия неровности рельефа; и
включения по меньшей мере одного исполнительного механизма указанной системы исполнительных механизмов для регулировки указанной рамы в ответ на выявление указанного наличия неровности рельефа.
2. Сельскохозяйственное транспортное средство по п. 1, в котором указанный датчик колеса содержит рычаг, шарнирно соединенный с креплением и соединенный с указанным копирующим колесом, причем указанный рычаг имеет текущее угловое положение относительно указанного крепления, указанный рычаг определяет нейтральное угловое положение относительно указанного крепления, указанный датчик колеса выполнен с возможностью выдачи сигнала угла колеса с величиной, соответствующей отклонению указанного текущего углового положения указанного рычага относительно указанного нейтрального углового положения.
3. Сельскохозяйственное транспортное средство по п. 2, в котором указанный датчик режущего аппарата выполнен с возможностью выдачи указанного сигнала высоты режущего аппарата с величиной, соответствующей высоте указанного режущего аппарата от поверхности земли.
4. Сельскохозяйственное транспортное средство по п. 3, в котором указанный контроллер выполнен с возможностью определения наличия неровности рельефа, когда разница между указанной величиной указанного сигнала угла колеса и указанной величиной указанного сигнала высоты режущего аппарата превышает заданное значение.
5. Сельскохозяйственное транспортное средство по п. 4, в котором указанный контроллер выполнен с возможностью определения, какой по меньшей мере один исполнительный механизм указанной системы исполнительных механизмов включить на основе указанной определенной разницы между указанной величиной указанного сигнала угла колеса и указанной величиной указанного сигнала высоты режущего аппарата.
6. Сельскохозяйственное транспортное средство по п. 1, в котором указанный контроллер выполнен с возможностью включения по меньшей мере одного исполнительного механизма указанной системы исполнительных механизмов для того, чтобы поддерживать требуемую высоту режущего аппарата и требуемый угол указанного режущего аппарата относительно поверхности земли.
7. Сельскохозяйственное транспортное средство по п. 1, в котором указанным углом наклона является угол продольного наклона и/или угол бокового наклона, а указанная система исполнительных механизмов содержит продольный исполнительный механизм, выполненный с возможностью регулировки указанного угла продольного наклона указанной рамы, и/или боковой исполнительный механизм, выполненный с возможностью регулировки указанного угла бокового наклона указанной рамы.
8. Сельскохозяйственное транспортное средство, содержащее:
шасси; и
систему жатки, поддерживаемую указанным шасси, причем указанная система жатки содержит:
раму;
режущий аппарат, поддерживаемый указанной рамой;
копирующее колесо, поддерживаемое указанной рамой позади указанного режущего аппарата;
датчик колеса, связанный с указанным копирующим колесом и выполненный с возможностью выдачи сигнала избыточной нагрузки на колесо, когда указанный датчик колеса определяет указанное смещение копирующего колеса к границе хода;
систему исполнительных механизмов, содержащую множество исполнительных механизмов, поддерживаемых указанным шасси и выполненных с возможностью регулировки высоты и/или угла наклона указанной рамы; и
контроллер, электрически соединенный с указанным датчиком колеса и указанной системой исполнительных механизмов, причем указанный контроллер выполнен с возможностью:
определения указанного сигнала избыточной нагрузки на колесо; и
включения по меньшей мере одного исполнительного механизма указанной системы исполнительных механизмов для регулировки указанной рамы в ответ на прием указанного сигнала избыточной нагрузки на колесо.
9. Сельскохозяйственное транспортное средство по п. 8, в котором указанная система исполнительных механизмов содержит продольный исполнительный механизм, выполненный с возможностью регулировки угла продольного наклона указанной рамы, и указанный контроллер выполнен с возможностью включения указанного продольного исполнительного механизма для регулировки указанного угла продольного наклона указанной рамы до тех пор, пока указанное копирующее колесо больше не будет смещено к указанной границе хода.
10. Сельскохозяйственное транспортное средство по п. 9, в котором указанная система исполнительных механизмов содержит исполнительный механизм высоты, выполненный с возможностью регулировки указанной высоты указанной рамы, а указанный контроллер выполнен с возможностью включения указанного исполнительного механизма высоты для регулировки указанной высоты указанной рамы до тех пор, пока указанное копирующее колесо больше не будет смещено к указанной границе хода.
11. Сельскохозяйственное транспортное средство по п. 8, в котором указанный датчик колеса содержит рычаг, шарнирно соединенный с креплением и соединенный с указанным копирующим колесом, причем указанный рычаг имеет текущее угловое положение относительно указанного крепления, указанный рычаг определяет положение избыточной нагрузки на копирующее колесо относительно указанного крепления, указанный датчик колеса выполнен с возможностью выдачи указанного сигнала избыточной нагрузки на колесо, когда указанное текущее угловое положение указанного рычага достигает указанного положения избыточной нагрузки на копирующее колесо.
12. Сельскохозяйственное транспортное средство по п. 8, в котором указанная система жатки содержит датчик режущего аппарата, связанный с указанным режущим аппаратом и выполненный с возможностью выдачи в указанный контроллер сигнала высоты режущего аппарата, соответствующего высоте указанного режущего аппарата.
13. Сельскохозяйственное транспортное средство по п. 12, в котором указанный контроллер выполнен с возможностью сохранения требуемой высоты указанного режущего аппарата и включения по меньшей мере одного исполнительного механизма указанной системы исполнительных механизмов для регулировки указанной рамы до тех пор, пока указанная высота указанного режущего аппарата не будет равна указанной требуемой высоте, а указанный сигнал избыточной нагрузки на колесо не будет определяться указанным контроллером.
14. Сельскохозяйственное транспортное средство по п. 12, в котором указанный контроллер выполнен с возможностью сохранения требуемого угла указанного режущего аппарата и включения по меньшей мере одного исполнительного механизма указанной системы исполнительных механизмов для регулировки указанной рамы до тех пор, пока угол указанного режущего аппарата не будет равен указанному требуемому углу режущего аппарата, а указанный сигнал избыточной нагрузки на колесо не будет определяться указанным контроллером.
15. Сельскохозяйственное транспортное средство по п. 12, в котором указанный контроллер выполнен с возможностью сохранения требуемой высоты и требуемого угла указанного режущего аппарата и включения по меньшей мере одного исполнительного механизма указанной системы исполнительных механизмов для регулировки указанной рамы до тех пор, пока указанная высота не будет равна указанной требуемой высоте, угол указанного режущего аппарата не будет равен указанному требуемому углу режущего аппарата, а указанный сигнал избыточной нагрузки на колесо не будет определяться указанным контроллером.
| СПОСОБ СВЯЗИ (ВАРИАНТЫ), СИСТЕМА МОБИЛЬНОЙ СВЯЗИ И МОБИЛЬНАЯ СТАНЦИЯ | 2015 |
|
RU2695511C2 |
| СПОСОБ ПОЛУЧЕНИЯ СКВОЗНЫХ ОТВЕРСТИЙ С ВЫСОКОЙ ПЛОТНОСТЬЮ НА ФОЛЬГИРОВАННЫХ ПОЛИИМИДНЫХ ПЛЕНКАХ С АДГЕЗИВНЫМ ПОДСЛОЕМ | 2023 |
|
RU2832206C1 |
| УСТАНОВОЧНЫЙ УЗЕЛ КЛАПАНА ДЛЯ АЭРОЗОЛЬНОГО БАЛЛОНЧИКА И СПОСОБ ЕГО ОБРАЗОВАНИЯ | 1996 |
|
RU2156725C2 |
| US 7707811 B1, 04.05.2010 | |||
| Устройство автоматического регулирования высоты среза | 1990 |
|
SU1797781A1 |

