Изобретение относится к области военной техники, а именно к способам применения мобильного автоматизированного вооружения с дистанционным управлением, и может быть использовано для решения задач обеспечения боевых действий Сухопутных войск.
Известен способ ведения боевых действий, система дистанционного управления стрельбой и дистанционно управляемое стрелковое оружие (см. заявку RU №2004110354, МПК F41A 23/00, опубл. 20.10.2005. Бюл.№29), принятый за прототип.
Способ ведения боя с использованием стрелкового оружия включает прицеливание и приведение в действие спускового устройства. При этом, по меньшей мере, одну единицу стрелкового оружия с видеокамерой устанавливают стационарно в зоне предполагаемых боевых действий, а управление прицеливанием и приведение в действие спускового механизма осуществляют дистанционно с применением компьютера и изображения, полученного с видеокамеры на экране монитора.
Недостатками способа ведения боевых действий, системы дистанционного управления стрельбой и дистанционно управляемого стрелкового оружия, взятого за прототип, являются:
- ограниченные функциональные возможности боевого применения дистанционно управляемого стрелкового оружия;
- жесткая привязка оружия к одной огневой позиции;
- отсутствие возможности введения поправок на метеорологические воздействия при ведении огня;
- большая вероятность потери дистанционно управляемого оружия при нарушении канала связи.
Предлагаемым изобретением решается задача по повышению эффективности применения мобильного автоматизированного вооружения с дистанционным управлением, предназначенного для обеспечения боевых действий Сухопутных войск.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа боевого применения мобильного комплекса дистанционно управляемого оружия, обеспечивающего оперативную доставку дистанционно управляемого оружия в зону боевых действий, его стабилизацию во время движения, захват и сопровождение цели, запоминание в произвольной последовательности нескольких неподвижных целей с последующим автоматическим прицеливанием и ведением огня по ним, учетом введенных в графический интерфейс программы управления числовых значений различного типа поправок, автоматическую блокировку движителя самодвижущейся платформы.
Указанный технический результат достигается тем, что в предлагаемом способе боевого применения мобильного комплекса дистанционно управляемого оружия, включающем в себя установку стрелкового оружия с видеокамерой в зоне предполагаемых боевых действий, дистанционное управление прицеливанием и приведением в действие спускового механизма с применением системы управления на базе бортового компьютера и изображения, полученного с видеокамеры на экране монитора, новым является то, что доставка дистанционно управляемого оружия в зону боевых действий осуществляется на бронированной дистанционно управляемой самодвижущейся транспортной платформе, способной передвигаться в условиях жесткого воздействия рельефа, состояния местности и климатических условий, при этом обеспечивается стабилизация дистанционно управляемого оружия в горизонтальной и вертикальной плоскостях во время движения платформы, на мониторе бортового компьютера системы управления обеспечивается захват и сопровождение цели, система управления на базе бортового компьютера обеспечивает запоминание в произвольной последовательности нескольких неподвижных целей с последующим автоматическим прицеливанием и ведением огня по ним с учетом введенных в графический интерфейс программы управления числовых значений поправок на дальность, температуру, давление, ветер, длины очередей, количества боезапаса, автоматическую блокировку движителя платформы и приводов исполнительных устройств при потере управляющего сигнала, в том числе при нахождении на наклонных поверхностях, с дальнейшим возвращением после заданной выдержки времени в исходную точку по ранее пройденному маршруту.
Осуществление доставки дистанционно управляемого оружия в зону боевых действий на бронированной дистанционно управляемой самодвижущейся транспортной платформе позволяет:
- обеспечить движение на пересеченной местности по твердым и песчаным почвам, по траве высотой до 1 м, снегу глубиной до 300 мм, в дождь, по залитым водой поверхностям глубиной до 300 мм со скоростью до 10 км/ч;
- обеспечить движение по шоссе со скоростью 25 км/ч;
- обеспечить допустимый поперечный крен - до 25 град;
- обеспечить допустимый продольный крен - до 30 град;
- обеспечить преодоление уступа высотой до 20 см;
- обеспечить преодоление рва шириной до 40 см;
- обеспечить в зависимости от типа местности передвижение шасси с помощью колес или гусениц.
Обеспечение способности шасси передвигаться в условиях жесткого воздействия рельефа, состояния местности и климатических условий позволяет применять мобильный комплекс дистанционно управляемого оружия в условиях различных климатических поясов, во все времена года, при различном состоянии рельефа местности.
Обеспечение стабилизации дистанционно управляемого оружия в горизонтальной и вертикальной плоскостях во время движения платформы позволяет:
- максимальная скорость ухода оружия в стабилизированном режиме и отсутствии воздействий не более 1,5 град/мин;
- статическая ошибка отработки углов в горизонтальной и вертикальной плоскостях не более 0,02 град;
- динамическая ошибка в вертикальной и горизонтальной плоскостях при отработке тестового воздействия частоты 0,5 Гц и амплитудой 2 градуса не более 0,5 градуса.
Обеспечение на мониторе бортового компьютера системы управления захвата и сопровождения цели позволяет:
- обеспечить минимальный размер сопровождаемой цели 5x5 элементов разложения на формате цифрового видео 705x576 элементов разложения;
- минимальный контраст цели, сопровождаемой на равномерном фоне 0,1;
- минимальное отношение сигнал/шум=6 при сопровождении цели на равномерном фоне.
Обеспечение системой управления на базе бортового компьютера запоминания в произвольной последовательности нескольких неподвижных целей с последующим автоматическим прицеливанием и ведением огня по ним позволяет обеспечить при этом количество поражаемых целей на максимальной дальности не менее 50%.
Введение в графический интерфейс программы управления числовых значений поправок на дальность, температуру, давление, ветер, длины очередей, количества боезапаса позволяет:
- обеспечить высокую точность огневого поражения;
- выбрать оптимальный характер ведения огня в зависимости от дальности, вида и размера цели.
Обеспечение системой управления на базе бортового компьютера автоматической блокировки движителя платформы и приводов исполнительных устройств при потере управляющего сигнала, в том числе при нахождении на наклонных поверхностях, позволяет:
- снизить вероятность безвозвратной потери мобильного комплекса дистанционно управляемого оружия в условиях ведения боевых действий;
- обеспечить в дальнейшем возвращение комплекса после заданной выдержки времени в исходную точку по ранее пройденному маршруту с использованием системы топопривязки и ориентации.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
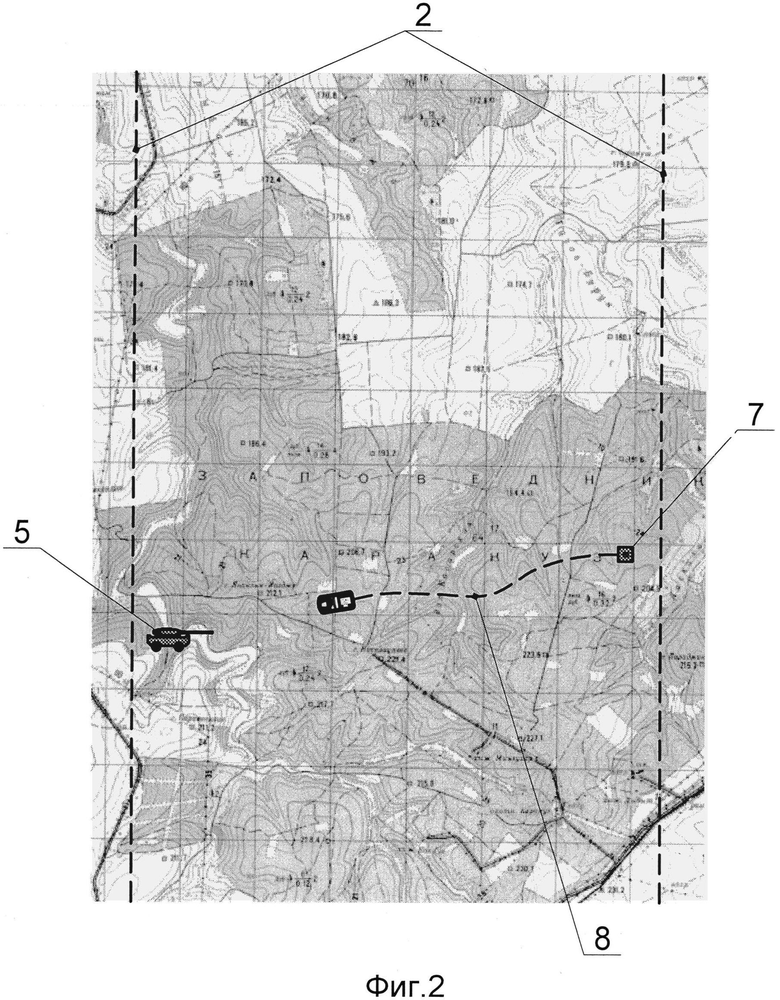
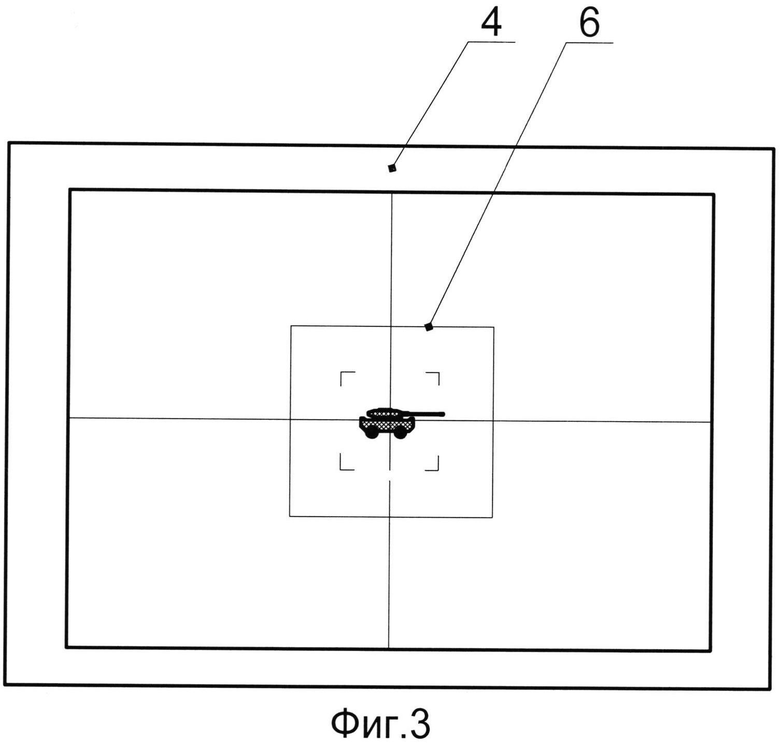
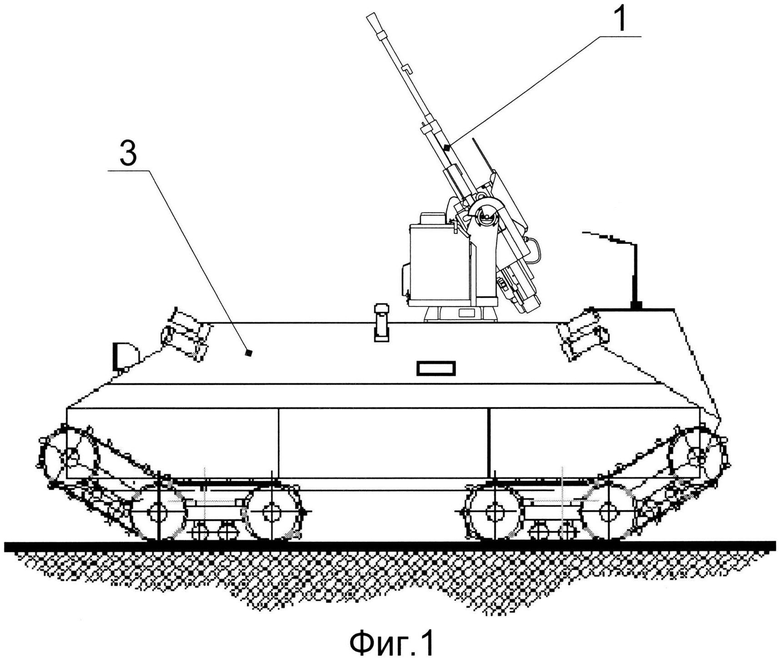
Сущность изобретения поясняется чертежами, где на фиг.1 показан общий вид мобильного комплекса дистанционно-управляемого оружия; на фиг.2 - схема комплекса; на фиг.3 - схема захвата и сопровождения цели на мониторе.
Способ боевого применения мобильного комплекса дистанционно -управляемого оружия реализуется следующим образом.
Доставка дистанционно управляемого оружия (ДУО) 1 в зону боевых действий (ЗБД) 2 осуществляется на бронированной дистанционно управляемой самодвижущейся транспортной платформе (СТП) 3, способной передвигаться в условиях жесткого воздействия рельефа, состояния местности и климатических условий. СТП 3 способна преодолевать труднопроходимые маршруты с установленным на ней вооружением. Проходимость такого шасси по пересеченной местности носит удовлетворительный характер и в зависимости от поставленных задач может иметь либо колесный, либо гусеничные движитель. Наиболее универсальным шасси может быть при использовании колесного движителя с возможностью установки гусениц. Бронирование значительно повышает живучесть мобильного комплекса дистанционно управляемого оружия. СТП 3 может быть использована как основа для создания перспективного семейства мобильных комплексов боевого, разведывательного, специального технического (инженерного), тылового и медицинского обеспечения.
Во время движения СТП 3, на котором установлено ДУО 1, для более точного наблюдения за обнаруженной целью в контролируемой зоне включается режим гироскопической стабилизации, при этом обеспечивается стабилизация ДУО 1 в горизонтальной и вертикальной плоскостях во время движения платформы СТП 3.
На мониторе 4 бортового компьютера системы управления обеспечивается захват и сопровождение цели 5. Наблюдение за местностью на мониторе проводится с помощью видеокамеры, установленной на СТП 3. В режиме сопровождения цель 5 на мониторе 4 захватывается рамкой сопровождения 6, которая перемещается вместе с целью 5. Для начала сопровождения необходимо курсор на мониторе 4 навести на цель 5 и зафиксировать его.
Система управления на базе бортового компьютера обеспечивает запоминание в произвольной последовательности нескольких неподвижных целей с последующим автоматическим прицеливанием и ведением огня по ним. Для этого необходимо сохранить каждую выбранную цель отдельно (но не более 10). При этом на мониторе 4 каждая точка наведения на цель выделится рамкой. Для активизации сохраненной цели в графическом интерфейсе курсор наводится на поле выбранной цели, далее происходит огневое поражение цели.
На мониторе 4 отображается измеренная температура, давление, скорость и направление ветра, и дальность до цели 5.
При изменении погодных условий вводятся значения поправок (температура, давление, ветер). Знак «>» обозначает направление ветра слева направо по направлению стрельбы. Знак «v» обозначает встречное направление ветра. При вводе отрицательных значений в данных полях направление ветра считается противоположным. Значение поправок (температура, давление, ветер) вводят для каждой выбранной цели отдельно.
Для поражения цели 5 устанавливается необходимый режим стрельбы (непрерывный/очередями), выбирается длительность очереди (длинная/короткая). По умолчанию установлены следующие значения длительности очереди:
- короткая - 150 мс (что соответствует 2-3 выстрелам);
- длинная - 450 мс (что соответствует 5-7 выстрелам).
При потере управляющего сигнала происходит автоматическая блокировка движителя платформы и приводов исполнительных устройств, в том числе при нахождении на наклонных поверхностях. После невосстановления управляющего сигнала через заданный промежуток времени происходит возвращением СТП 3 в исходную точку 7 по ранее пройденному маршруту 8 с использованием системы топопривязки и ориентации за счет сохранения географических координат пройденного пути в бортовом компьютере.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа боевого применения мобильного комплекса дистанционно управляемого оружия, обеспечивающего оперативную доставку дистанционно управляемого оружия в зону боевых действий, его стабилизацию во время движения, захват и сопровождение цели, запоминание в произвольной последовательности нескольких неподвижных целей с последующим автоматическим прицеливанием и ведением огня по ним, учетом введенных в графический интерфейс программы управления числовых значений различного типа поправок, автоматическую блокировку движителя самодвижущейся платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ функционирования боевого дистанционно управляемого модуля в различных режимах применения | 2016 |
|
RU2664105C1 |
| Автоматизированный боевой комплекс | 2018 |
|
RU2724448C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЕДЕНИЕМ СНАЙПЕРСКОГО ОГНЯ | 2011 |
|
RU2474782C1 |
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2767103C1 |
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2757095C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2016 |
|
RU2629688C1 |
| АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ КОМПЛЕКС ОГНЕВОГО ПОРАЖЕНИЯ | 2008 |
|
RU2386920C2 |
| СПОСОБ БОРЬБЫ С БРОНЕОБЪЕКТАМИ | 2009 |
|
RU2404402C1 |
| СТРЕЛКОВЫЙ ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2013 |
|
RU2530464C1 |
Изобретение относится к области военной техники, а именно к способам боевого применения мобильного комплекса дистанционно управляемого оружия. Способ боевого применения мобильного комплекса дистанционно - управляемого оружия включает установку стрелкового оружия с видеокамерой в зоне предполагаемых боевых действий, дистанционное управление прицеливанием и приведением в действие спускового механизма с применением системы управления на базе бортового компьютера и изображения, полученного с видеокамеры на экране монитора. Доставка дистанционно управляемого оружия в зону боевых действий осуществляется на бронированной дистанционно управляемой самодвижущейся транспортной платформе. Транспортная платформа способна передвигаться в условиях жесткого воздействия рельефа, состояния местности и климатических условий. Во время движения платформы обеспечивается стабилизация дистанционно управляемого оружия в горизонтальной и вертикальной плоскостях. На мониторе бортового компьютера системы управления обеспечивается захват и сопровождение цели. Система управления на базе бортового компьютера обеспечивает запоминание в произвольной последовательности нескольких неподвижных целей с последующим автоматическим прицеливанием и ведением огня. Ведение огня осуществляется с учетом введенных в графический интерфейс программы управления числовых значений поправок на дальность, температуру, давление, ветер, длины очередей, количества боезапаса, автоматическую блокировку движителя платформы. Достигается повышение эффективности применения мобильного автоматизированного вооружения. 3 ил.
Способ боевого применения мобильного комплекса дистанционно управляемого оружия, включающий в себя установку стрелкового оружия с видеокамерой в зоне предполагаемых боевых действий, дистанционное управление прицеливанием и приведением в действие спускового механизма с применением системы управления на базе бортового компьютера и изображения, полученного с видеокамеры на экране монитора, отличающийся тем, что доставка дистанционно управляемого оружия в зону боевых действий осуществляется на бронированной дистанционно управляемой самодвижущейся транспортной платформе, способной передвигаться в условиях жесткого воздействия рельефа, состояния местности и климатических условий, при этом обеспечивается стабилизация дистанционно управляемого оружия в горизонтальной и вертикальной плоскостях во время движения платформы, на мониторе бортового компьютера системы управления обеспечивается захват и сопровождение цели, система управления на базе бортового компьютера обеспечивает запоминание в произвольной последовательности нескольких неподвижных целей с последующим автоматическим прицеливанием и ведением огня по ним с учетом введенных в графический интерфейс программы управления числовых значений поправок на дальность, температуру, давление, ветер, длины очередей, количества боезапаса, автоматическую блокировку движителя платформы и приводов исполнительных устройств при потере управляющего сигнала, в том числе при нахождении на наклонных поверхностях, с дальнейшим возвращением после заданной выдержки времени в исходную точку по ранее пройденному маршруту.
| US 20080053300 A1, 06.03.2008 | |||
| Криоаппликатор | 1980 |
|
SU906553A1 |
| Прибор для вычерчивания спиралей | 1952 |
|
SU99143A1 |
| . | |||

