Изобретение относится к области военной техники, а именно к автоматизированному вооружению с дистанционным управлением, которое устанавливается на обычное или бронированное транспортное средство, и может быть использовано для обнаружения и огневого поражения различных целей при боевых действиях.
Известен автоматизированный дистанционно управляемый комплекс огневого поражения по патенту на изобретение RU №2386920 (опубл. 20.04.2010). Данное техническое решение содержит оружейную часть с единицей дистанционно управляемого оружия, видеокамеру, закрепленную на оружии, приводы горизонтального и вертикального перемещения оружия, привод спускового механизма и приемопередающее устройство, соединенные каналом связи через управляющее приемопередающее устройство с компьютером, имеющим монитор и устройство управления, а также коммутатор между приемопередающим устройством и компьютером. Указанный комплекс снабжен дистанционно управляемым устройством, которое содержит две видеокамеры широкого и узкого поля обзора, один дальномер с устройством запоминания дальности объекта-цели, тепловизор, датчик учета параметров стрельбы, выбранный из ряда датчиков: термодатчик, датчик атмосферного давления, датчик направления и скорости ветра, датчик выстрела, блок управления и сопряжения с каналом связи через приемопередающее устройство. Дистанционно управляемое устройство комплекса предварительно устанавливают на боевую позицию посредством каркаса-основания, а оператор с блоком компьютерного управления располагается в укрытии на определенном расстоянии. Компьютер связан посредством канала связи через приемопередающие устройства с аппаратурой устройств приводов. Для управления используют компьютер с монитором, к которому подключена клавиатура и устройство управления, например «джойстик» либо «трекбол» или «мышь». Недостатком данного технического решения является отсутствие в его составе систем стабилизации приводов горизонтального и вертикального перемещения оружия, что делает его неэффективным для применения в составе передвижного боевого средства при стрельбе "сходу". В этой связи следует заметить, что современные боевые модули, применяемые на передвижных боевых средствах, практически всегда снабжаются приводами, включающими системы стабилизации оружия и видеокамер в двух плоскостях [1], [2], [3]. Кроме того, примененные в данном решении устройства управления типа «джойстик», «трекбол» или «мышь» не позволяют эффективно управлять вооружением при движении транспортного средства, особенно при его движении по пересеченной местности.
Известен универсальный боевой модуль по патенту на изобретение RU №2531421 (опубл. 20.10.2014 г.). Данное техническое решение предназначено для запуска ПТУР, но может комплектоваться другими типами вооружения, например стрелково-пушечным. Универсальный боевой модуль содержит поворотную (в виде цилиндрической обечайки), подъемную платформы с основанием (в виде вертикальной стойки коробчатой формы) и вращающейся частью (в виде цилиндрической обечайки), устройство управления вооружением с прицелом-прибором наведения, электронные блоки управления электрическими приводами наведения, автомат сопровождения цели, пульт оператора с дисплеем, соединенный электрическими линиями связи (проходящие через отверстие в заглушке поворотной платформы) с устройством управления вооружением, опорное устройство (носитель или треножное основание, содержащее фланцы с отверстиями). Основание подъемной платформы закреплено на вращающейся части поворотной платформы. Обе платформы содержат электрические приводы наведения с зубчатыми редукторами, люльки, закрепленные на вращающейся части подъемной платформы, с ПТУРами (или другими системами вооружения). Наружная часть обечайки основания содержит элементы крепления, внутренняя часть - зубчатый венец с внутренним зацеплением. Цилиндрическая обечайка вращающейся части установлена внутри обечайки основания на двух подшипниках с диаметром меньше длины ПТУР (или другого типа оружия) и содержит в верхней части заглушку с зубчатыми колесами и выходной шестерней. Основание подъемной платформы закреплено нижней частью на заглушке вращающейся части поворотной платформы. Вертикальная стойка в верхней части содержит жесткое кольцо с подшипником. Люльки закреплены вместе с устройством управления на торцах вращающейся части. При всех несомненных достоинствах данного технического решения, следует отметить, что электрические линии связи пульта оператора с устройством управления вооружением, проходящие через отверстие, выполненное в заглушке поворотной платформы и расположенное на ее оси, ограничивает угол поворота платформы максимально допустимым углом закручивания жгутов линий связи, так как указанная связь осуществляется непосредственно по проводам без применения вращающегося контактного устройства (ВКУ). Это обстоятельство ухудшает условия оптимального маневрирования приводом горизонтального наведения.
Известен унифицированный боевой модуль по свидетельству на полезную модель RU 31844 (опубл. 27.08.2003 г.). Данный аналог содержит бронированную башню, обладающую защищенностью на уровне защиты башни основного боевого танка, с установленными на крыше башни прицелом и блоком вынесенного оружия, включающим две вертикальные стойки с размещенным на них оружием, погон с механизмом поворота башни, магазины и тракты питания оружия, систему управления огнем с информационно-управляющим комплексом, электрооборудование с вращающимся контактным устройством. Боевой модуль выполнен в виде моноблока с возможностью установки посредством погона и вращающегося контактного устройства на любое транспортное средство, имеющее источник постоянного электрического тока, необходимые габариты и соответствующую грузоподъемность, при этом блок вынесенного оружия выполнен съемным. Недостатком аналога является то, что его бронированная башня обитаема и, как следствие, боевой модуль должен быть бронированным и при этом с необходимостью имеет значительные габариты и вес, что исключает возможность его установки на легкие бронеавтомобили или другие транспортные средства.
Наиболее близким техническим решением к заявляемому изобретению по совокупности характеризующих его функционально обобщенных существенных признаков является унифицированный боевой модуль по свидетельству на полезную модель RU №128927 - прототип. Данный аналог - прототип содержит погон с механизмом поворота, блок вооружения с возможностью установки различных видов и типов оружия, магазины и тракты питания оружия, систему управления вооружением, пульт управления, электрооборудование, оптическое вращающееся контактное устройство, соединенное с помощью волоконно-оптического кабеля с системой управления вооружением и с пультом управления. В данном аналоге новым является применение вращающегося контактного устройства с оптическим переходом, все же другие элементы подразумеваются известными из уровня техники. Однако, характеризующие прототип совокупность существенных признаков не является достаточной для осуществления устройства и его функционирования, что является недостатком аналога-прототипа. Так, например, отсутствуют признаки присутствия элементов, осуществляющих взаимное преобразование электрического и оптического сигналов (медиаковертеров), без которых оптическое контактное устройство не может осуществлять связь между пультом управления и системой управления вооружением. Кроме того, вращающееся контактное устройство с необходимостью должно содержать не только оптический переход, но и силовой электрический переход, необходимый для соединения системы управления вооружением с бортовым источником питания. Необходимо так же отметить, что известные из уровня техники системы дистанционного управления вооружением, во-первых, не все снабжены приводами с системами стабилизации вооружения и автоматами сопровождения цели. Во вторых - известные устройства управления приводами и вооружением типа «джойстик», «трекбол» или «мышь» не позволяют эффективно управлять вооружением при движении транспортного средства.
Задачей изобретения является создание боевого модуля с дистанционным управлением, в максимальной степени отвечающего своему назначению и современному уровню техники. При использовании изобретения достигается следующая совокупность полезных технических результатов:
а) обеспечивается более точная работа системы стабилизации приводов горизонтального и вертикального наведения, в результате чего увеличивается вероятность поражения одним и тем же боекомплектом как подвижных, так и неподвижных целей при стрельбе как при движении транспортного средства, так и при его остановке;
б) обеспечивается возможность подсчета количества израсходованных боеприпасов без использования специальных датчиков;
в) обеспечивается возможность быстрой перенастройки модуля для ведения стрельбы в ручном режиме при нештатной ситуации (разрушение блоков, отсутствие питающего напряжения и т.п.);
г) обеспечивается эффективное управление вооружением при движении транспортного средства по пересеченной местности;
д) обеспечивается повышение безопасности использования вооружения.
Сущность изобретения
Боевой модуль с дистанционным управлением включает в себя устанавливаемое на крышу транспортного средства опорно-поворотное устройство (ОПУ), снабженное вращающимся контактным устройством (ВКУ), содержащим как оптический, так и электрический переходы, на ОПУ установлены прицельный комплекс, блок датчиков метеоусловий, первый медиаконвертер Ethernet, система стабилизации оружия, состоящая из блока управления приводами, усилителя мощности, датчика угловой скорости, приводов горизонтального и вертикального наведения, все электронные и электромеханические блоки, расположенные на ОПУ, связаны цепями питания с верхней стороной электрического перехода ВКУ непосредственно или через блок сопряжения, а информационными шинами через первый медиаконвертер Ethernet - с верхней стороной оптического перехода ВКУ, приводы снабжены транспортировочными устройствами стопорения механизмов приводов, на ОПУ также установлено сменное устройство-ложемент с противооткатным устройством для укрепления в нем определенного типа оружия, а именно пулемета или автоматического гранатомета, снабженного магазинами, трактами подачи боеприпасов и штатным электроспуском, установлена система пусковых установок для метания гранат; боевой модуль также включает в себя расположенные внутри транспортного средства компьютер, объединенный с видеосмотровым устройством, связанный с компьютером пульт управления боевым модулем, включает также второй медиаконвертер Ethernet, блок распределения питания (БРП), причем БРП своим входом соединен с источником бортового питания транспортного средства, а выходами соединен с нижней стороной электрического перехода ВКУ и с блоками модуля, расположенными внутри транспортного средства, информационные и управляющие порты компьютера при этом соединены через второй медиаконвертер Ethernet с нижней стороной оптического перехода ВКУ. Боевой модуль с дистанционным управлением, согласно изобретению, имеет характерные особенности, определяющие его новизну и обеспечивающие достижение заявленных технических результатов. Характерные особенности заявляемого боевого модуля определяются следующими группами существенных отличительных признаков:
- в состав боевого модуля введен формирователь темпа и длины пулеметной очереди, входом управления подключенный через блок сопряжения, первый медиаконвертер Ethernet, оптический переход ВКУ и второй медиаконвертер Ethernet к управляющему порту компьютера, а выходом подключенный к электроспуску оружия;
- в ОПУ введены устройства переключения в ручной режим управления оружием;
- пульт управления боевым модулем выполнен в виде основания, которое жестко укреплено на рабочем месте стрелка-оператора, на основании расположены две консольные неподвижные эргономичные рукояти, выполненные на манер рукоятей джойстика, с характерными для джойстика органами управления;
- между рукоятями располагаются тумблеры и кнопки управления, в том числе тумблер разрешения огня, с возможностью замыкания/размыкания электрической цепи питания формирователя темпа и длины пулеметной очереди, причем указанная цепь замкнута через отдельное контактное кольцо электрического перехода ВКУ;
- на правой рукояти пульта размещен пропорциональный манипулятор (кнюппель), адаптированный под большой палец руки стрелка-оператора с функцией управления наведением оружия;
Обозначенная сущность изобретения связана с заявленными техническими результатами следующим образом соответственно:
а) поскольку штатный темп стрельбы из автоматического оружия достаточно высок и составляет, например, для пулемета "Корд" не менее 600 выстрелов в минуту, а для автоматического гранатомета АТС 40 до 400 выстрелов в минуту, то стрельба очередями из указанных типов оружия, установленных на боевой модуль, с неизбежностью сопровождается уводом оружия с линии прицеливания за счет отдачи и неабсолютной жесткости всех элементов, фиксирующих оружие в пространстве, включая несущие элементы модуля, а также кузов и шасси транспортного средства. При этом, чем выше темп стрельбы и длиннее очередь, тем значительнее проявление данного эффекта. Системы вертикальной и горизонтальной стабилизации оружия при этом не могут обеспечить возврат оружия на линию прицеливания после каждого очередного выстрела, поскольку они для этого не предназначены и их быстродействия недостаточно для непрерывной отработки возмущений, возникающих в результате стрельбы очередями со штатным темпом стрельбы. Введение в конструкцию формирователя темпа и длины пулеметной очереди, входом управления подключенного через блок сопряжения, первый медиаконвертер Ethernet, оптический переход ВКУ и второй медиаконвертер Ethernet к управляющему порту компьютера, а выходом подключенного к электроспуску оружия, позволяет обеспечить более точную работу систем стабилизации за счет того, что регулируя (уменьшая) темп стрельбы очередями, становится возможным увеличить время между отдельными выстрелами. Этого времени становится достаточно для отработки системой стабилизации возмущающего воздействия отдачи на оружие и возврата его на линию прицеливания при том, что стрельба ведется в автоматическом режиме. В результате этого увеличивается вероятность поражения одним и тем же боекомплектом как подвижных, так и неподвижных целей при стрельбе как при движении транспортного средства, так и при его остановке;
б) формирователь темпа и длины пулеметной очереди позволяет задать определенный темп и длину очереди и, следовательно, программно обеспечить подсчет количества израсходованных боеприпасов без использования дополнительных датчиков выстрела;
в) при возникновении нештатной ситуации (поломка или разрушение в бою блоков боевого модуля, отсутствие питающего напряжения и т.п.), использование устройства переключения в ручной режим управления оружием освобождает связи оружия с приводами горизонтального и вертикального наведения, после чего ОПУ представляет собою расположенную на транспортном средстве турель с оружием, готовым к использованию в ручном режиме;
г) эффективное управление вооружением при движении транспортного средства по пересеченной местности обеспечивается, во-первых, наличием систем горизонтальной и вертикальной стабилизации, во-вторых, конструкцией пульта управления, который позволяет оператору - стрелку держаться обеими руками за неподвижные рукояти пульта и, таким образом, фиксировать свое тело от бросков на ухабах и, одновременно, при помощи пальцев рук, оперативно управлять всеми системами боевого модуля и в третьих - наличием автомата сопровождения цели;
д) повышение безопасности использования оружия обеспечивается использованием тумблера разрешения огня на пульте управления, который замыкает/размыкает электрическую цепь питания формирователя темпа и длины пулеметной очереди, причем указанная цепь замкнута через отдельное контактное кольцо электрического перехода ВКУ, что исключает открытие огня при сбоях программного обеспечения. Дополнительную степень безопасности обеспечивает откидная защитная крышка, закрывающая тумблер и предотвращающая его случайное включение. Также повышается безопасность возможностью подключения к компьютеру боевого модуля датчиков люков и дверей транспортного средства и блокированием наведения боевого модуля и стрельбы из автоматического оружия при открытых люках и дверях.
Сущность изобретения поясняется чертежами, где изображено:
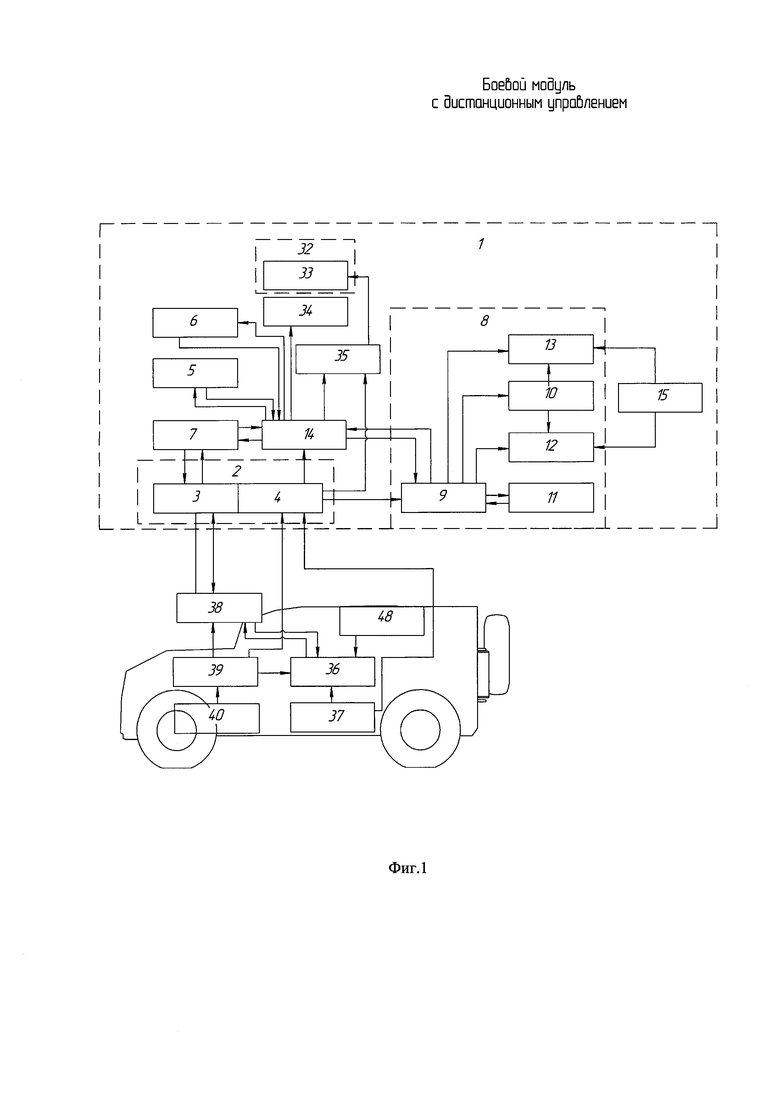
Фиг. 1 - функциональная схема боевого модуля с дистанционным управлением;
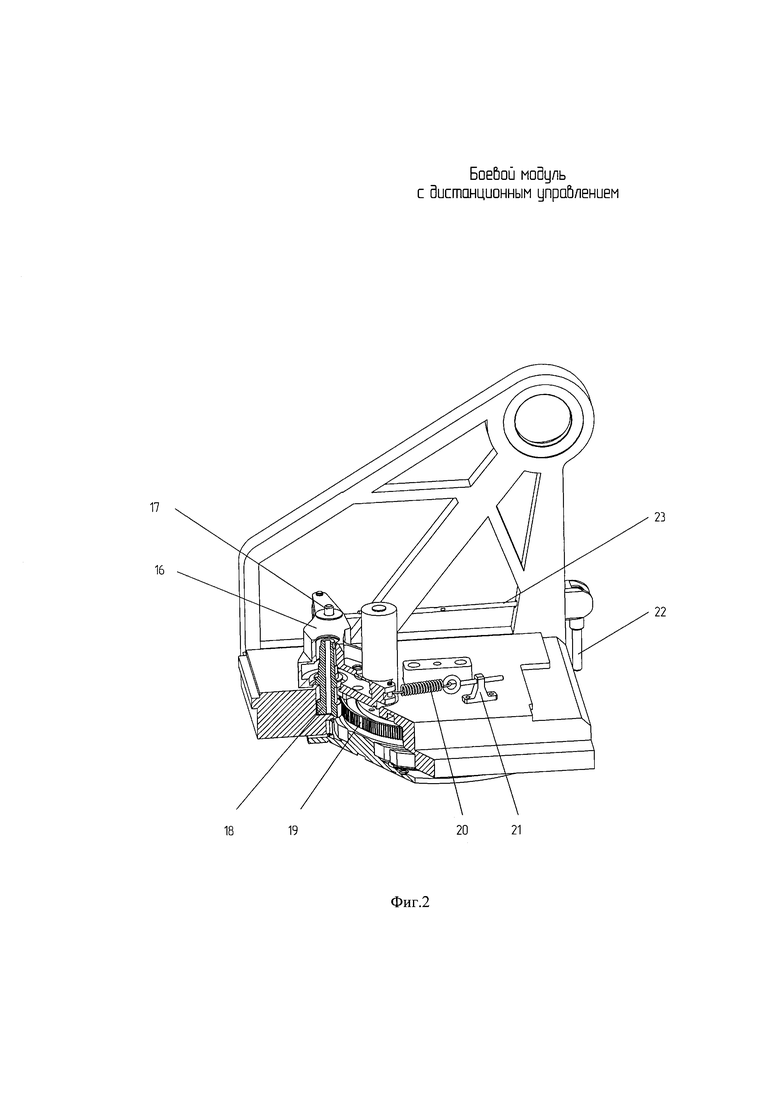
Фиг. 2 - конструктивная схема механизма привода горизонтального наведения с устройством переключения ОПУ в ручной режим управления оружием;
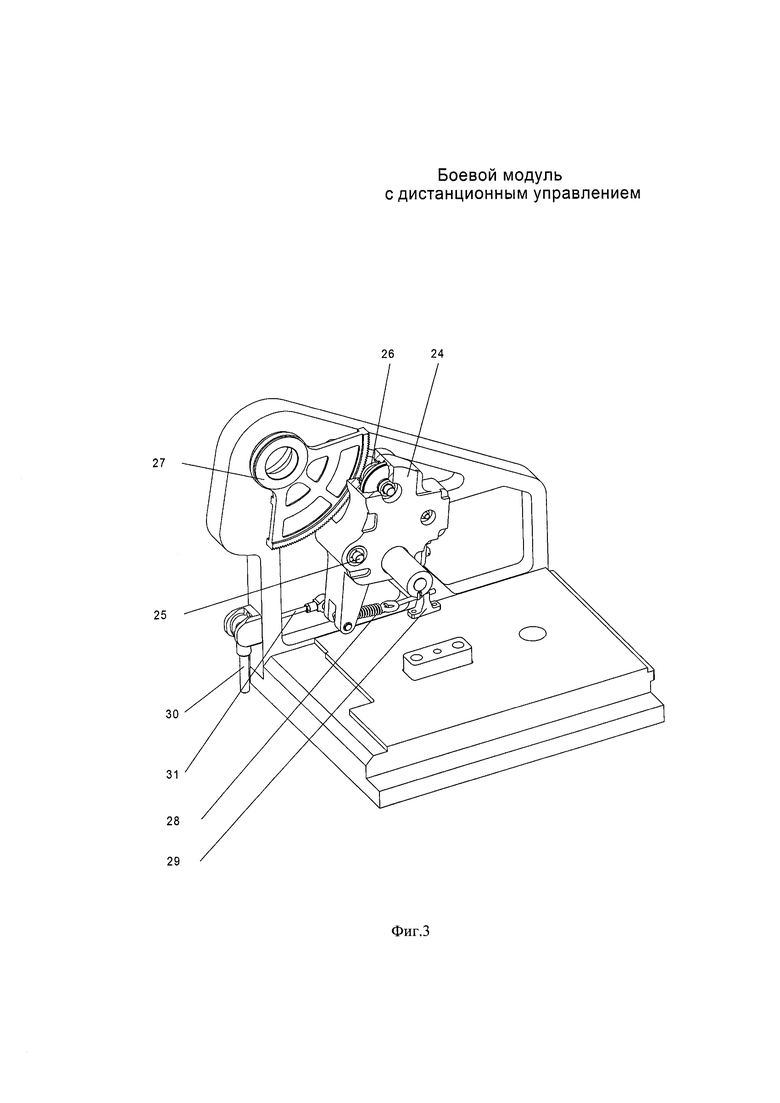
Фиг. 3 - конструктивная схема механизма привода вертикального наведения с устройством переключения ОПУ в ручной режим управления оружием;
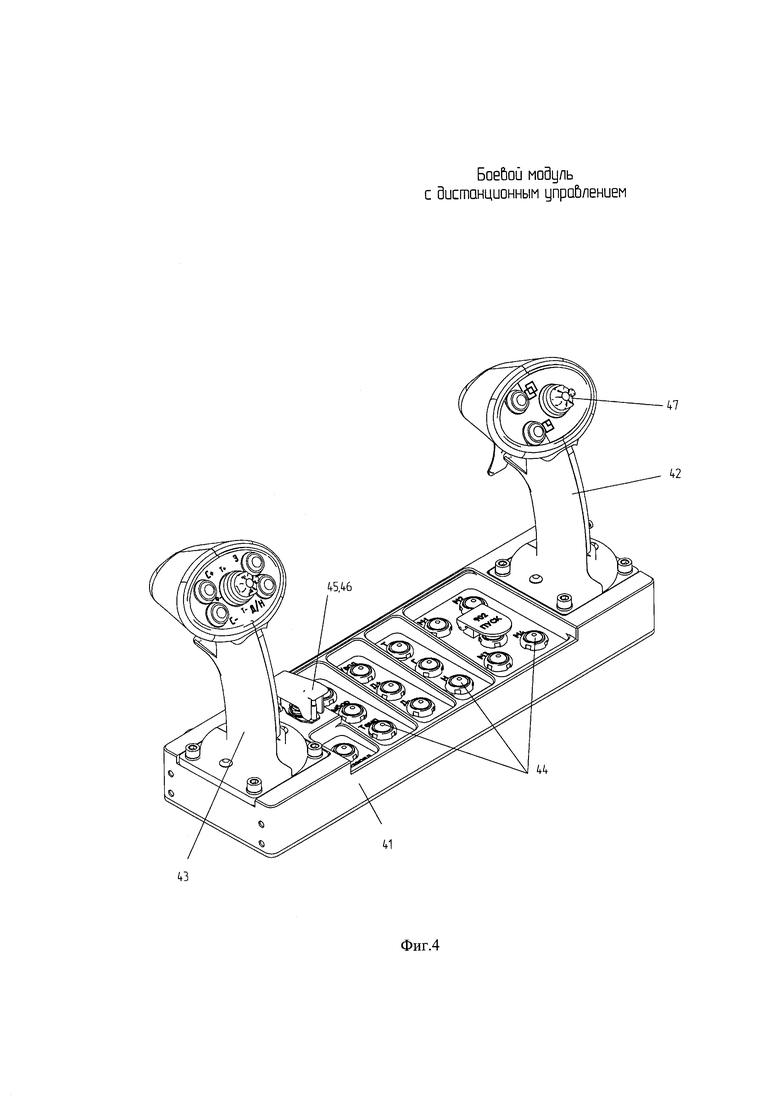
Фиг. 4 - конструктивная схема пульта управления.
Боевой модуль с дистанционным управлением Фиг. 1 содержит опорно-поворотное устройство (ОПУ) 1, которое устанавливается на крышу подходящего для этого транспортного средства, например это может быть легкий бронеавтомобиль "Тигр" отечественного производства (на схеме Фиг. 1 показан условно). ОПУ 1 снабжено вращающимся контактным устройством (ВКУ) (2), которое содержит оптический переход (3) и электрический переход (4). На ОПУ (1) установлен прицельный комплекс (5), представляющий собою блок управляемых телевизионных (обзорная, прицельная) и тепловизионных камер, дальномера, с устройствами защиты оптики и всеми сопутствующими аксессуарами, более подробное описание подобного комплекса можно найти в источниках [4], [5]. На ОПУ также размещен блок датчиков метеоусловий (6), в состав которого могут входить датчик скорости и направления ветра, датчик температуры, датчик влажности. На ОПУ размещен первый медиаконвертер Ethernet (7) и система стабилизации оружия (8), состоящая из блока управления приводами (9), усилителя мощности (10), двухплоскостного датчика угловой скорости (11), привода горизонтального наведения (12) и привода вертикального наведения 13. Более подробное описание подобной системы стабилизации оружия можно найти в источниках [6, 10]. Описание двухплоскостного датчика угловой скорости имеется в источнике [7]. Все электронные и электромеханические блоки, расположенные на ОПУ 1, связаны цепями питания с верхней стороной электрического перехода (4) ВКУ (2) непосредственно или через блок сопряжения (14) и блок управления приводами (9). В боевом модуле с дистанционным управлением блок сопряжения (14) выполнен как преобразователь сигнальных команд в силовое управление (спуски гранат, электроспуск основного оружия, питание транспортировочных устройств стопорения механизмов приводов наведения, взаимодействие системы управления и системы стабилизации, питание и управление прицельным комплексом). Электрический переход (4) ВКУ (2) представляет собой систему контактных колец с токосъемниками, подобными общеизвестным электрическим вращающимся контактным устройствам [8]. Информационные шины блоков (5), (6), (9) связаны через блок сопряжения (14) и первый медиаконвертер Ethernet (7) с верхней стороной оптического перехода (3) ВКУ (2). Оптический переход (3) ВКУ (2) подобен устройству, информация о котором также имеется в источнике [8]. В состав ОПУ входят транспортировочные устройства стопорения механизмов приводов горизонтального и вертикального наведения с дистанционным управлением (не показаны) и устройство переключения в ручной режим управления оружием (15), выполненное в виде совокупности рычажных механизмов, связанных с зубчатыми передачами механизмов приводов (12) и (13). Конструктивные схемы указанного устройства переключения в составе механизмов приводов горизонтального и вертикального наведения изображены соответственно на Фиг. 2 и 3. Механизм (16) привода (12) горизонтального наведения Фиг. 2 установлен на оси (17), жестко закрепленной на ОПУ (1), с возможностью поворота. Шестерня (18) механизма 16 образует с погоном (19) вращающейся части ОПУ (1) безлюфтовое зубчатое соединение с помощью пружины (20) и ее натяжителя (21). Первый рычаг (22) управления устройством (15) представляет собою кулачковый механизм, связанный тягой (23) с механизмом (16). Аналогично, механизм (24) привода (13) вертикального наведения Фиг. 3 установлен на оси (25), жестко закрепленной на ОПУ (1), с возможностью поворота. Шестерня (26) механизма (24) образует с сектором (27) качающейся части ОПУ (1) безлюфтовое зубчатое соединение с помощью пружины (28) и ее натяжителя (29). Второй рычаг (30) управления устройством (15) представляет собою кулачковый механизм, связанный тягой (31) с механизмом (24). Механизмы (16) и (24) соответственно приводов (12) и (13) горизонтального и вертикального наведения представляют собой совокупность исполнительного механизма, редуктора, электромагнитного стопора и датчика положения (не показаны). На ОПУ (1) также установлено сменное устройство-ложемент (32) с противооткатным устройством для укрепления в нем определенного типа оружия (33), а именно пулемета или автоматического гранатомета, снабженного магазинами, трактами подачи боеприпасов и штатным электроспуском. В качестве оружия может быть установлен крупнокалиберный пулемет 6П49 "КОРД" 12,7 мм, пулемет 6П7К ПКТМ 7,62 мм, автоматический гранатомет АТС 40 или другое автоматическое оружие. Для каждого типа оружия (33) используется специализированное под данный тип устройство-ложемент (32). На ОПУ (1) также установлена система пусковых установок (34) для метания гранат, информация о подобных установках имеется в источнике [9], и формирователь темпа стрельбы и длины пулеметной очереди (35), входом управления подключенный через блок сопряжения (14) и первый медиаконвертер Ethernet (7) к верхней стороне оптического перехода (3) ВКУ(2), а цепью питания подключенный к верхней стороне электрического перехода (4) ВКУ (2). При этом цепь питания формирователя (35) отделена от цепи питания всех электронных и электромеханических блоков, установленных на ОПУ (1) и замыкается через отдельное контактное кольцо электрического перехода (4) ВКУ (2). Формирователь темпа и длины пулеметной очереди (35) представляет собой управляемый от компьютера формирователь импульсного напряжения, с возможностью включения/выключения и с возможностью управления длительностью импульса и частотой следования импульсов. Амплитуда импульса формирователя (35) соответствует паспортному значению напряжения, необходимого для приведения в действие электроспуска оружия (33), а минимальная длительность импульса соответствует такому значению, при котором происходит гарантированное срабатывание электроспуска оружия (33), имеющее результатом единичный выстрел. Внутри транспортного средства, соответственно, расположен компьютер (36), объединенный с видеосмотровым устройством (монитором), расположен пульт управления (37) боевым модулем, связанный с компьютером (36), второй медиаконвертер Ethernet (38), через который информационные и управляющие порты компьютера (36) соединены с нижней стороной оптического перехода (3) ВКУ (2). Также внутри транспортного средства расположен блок распределения питания (БРП) (39), который своим входом соединен с бортовым источником питания (40) (аккумуляторной батареей), а выходами БРП (39) соединен с нижней стороной электрического перехода (4) ВКУ (2) и с блоками модуля, расположенными внутри транспортного средства. Пульт управления (37) боевым модулем Фиг. 4 представляет собою основание (41), которое жестко укреплено на рабочем месте стрелка-оператора, на основании (41) расположены две консольные неподвижные эргономичные рукояти правая (42) и левая (43), выполненные на манер рукоятей джойстика, с характерными для джойстика органами управления (кнопками, гашетками и т.п.), между рукоятями (42) и (43) располагаются тумблеры и/или кнопки управления (44), в том числе располагается тумблер разрешения огня (45) под откидной защитной крышкой (46), причем на правой рукояти (42) размещен пропорциональный манипулятор (кнюппель) (47), адаптированный под большой палец руки стрелка-оператора с функцией управления наведением оружия (33). Боевой модуль с дистанционным управлением может дополнительно включать в себя двухпозиционные датчики (48) состояния люков и дверей транспортного средства (открыто/закрыто), связанные с дополнительными информационными портами компьютера (36).
Боевой модуль с дистанционным управлением функционирует следующим образом. Через люк транспортного средства производят заряжание оружия, а затем для безопасности закрывают люки и двери транспортного средства, сигнал о чем после включения поступит в компьютер (36). Включением тумблера блока распределения питания (39) подается питание на блоки боевого модуля, находящиеся внутри транспортного средства. При нажатии на кнопку включения компьютера (36) загружается его операционная система и боевой модуль переходит в транспортный режим.
Боевой модуль функционирует в следующих режимах: «Транспортный», «Готовность», «Наведение».
В транспортном режиме питание на блоки ОПУ (1) не подается, механизмы приводов горизонтального (16) и вертикального (24) наведения застопорены транспортировочными устройствами стопорения. В данном режиме возможно производить настройку программного обеспечения компьютера (36).
Нажатием соответствующей кнопки пульта управления (37) боевой модуль переводится в режим "Готовность", который является промежуточным режимом между режимом "Транспортный" и режимом "Наведение". Этот режим позволяет сократить время перехода модуля в режим «Наведение» за счет предварительной подачи напряжения на датчик угловой скорости (11). При переводе в режим «Готовность» производится подача питания на блоки ОПУ (1), на прицельном комплексе (5) открывается устройство защиты оптики, на видеосмотровом устройстве компьютера (36) появляется изображение с обзорной камеры прицельного комплекса (5), а так же информация о типе установленного оружия, углах его поворота, количестве боеприпасов, температуре окружающего воздуха от блока датчиков метеоусловий (6), границах видимости прицельной камеры и тепловизионной камеры прицельного комплекса (5) и т.д. При этом механизмы приводов горизонтального (16) и вертикального (24) наведения все еще застопорены транспортировочными устройствами стопорения.
При нажатии на соответствующую кнопку пульта управления (37) боевой модуль переходит в режим "Наведение", который является основным режимом работы боевого модуля. При переходе в режим «Наведение» производится дистанционное срабатывание транспортировочных устройств стопорения и отключение стопоров механизмов приводов горизонтального (16) и вертикального (24) наведения. После этого появляется возможность управления боевым модулем, разрешается стрельба из автоматического оружия (33) и запуск гранат из системы пусковых установок (34), т.е боевой модуль с дистанционным управлением переходит в состояние боевой готовности. Стрелок-оператор при этом занимает рабочую позицию за пультом управления (37), держась обеими руками за рукояти (42) и (43). Управление наведением оружия (33) осуществляется поворотом большим пальцем правой руки кнюппеля (47) влево-вправо по горизонтали и вверх-вниз по вертикали на угол, пропорциональный скорости поворота оружия. Ведение огня из оружия (33) осуществляется нажатием курка правой рукояти (42) пульта управления, при этом тумблер разрешения огня (45) под откидной защитной крышкой (46) должен быть переведен в положение «Вкл». Для отработки баллистических поправок до открытия огня необходимо произвести замер дальности до цели с помощью лазерного дальномера нажатием на курок левой рукояти (43). Автомат сопровождения цели программно реализован в компьютере. Для автоматического сопровождения цели необходимо с помощью кнюппеля (47) навести строб захвата на цель и зафиксировать ее нажатием соответствующей кнопки пульта управления (37). Формирователь темпа и длины пулеметной очереди (35) позволяет из меню на видеосмотровом устройстве компьютера (36) задать определенный темп и с помощью соответствующей кнопки пульта управления (37) длину очереди. Расчет количества оставшихся боеприпасов осуществляется компьютером по числу импульсов выданным формирователем темпа и длины пулеметной очереди (35) на электроспуск оружия (33). После замены магазина оружия и ручной перезарядки оружия нажатием на соответствующую кнопку пульта управления (37) осуществляется сброс значения количества оставшихся боеприпасов до полного количества в магазине. Для управления вооружением при движении транспортного средства по пересеченной местности боевой модуль снабжен системой стабилизации оружия (8). Система стабилизации оружия (8) функционирует в соответствии с известными принципами, изложенными в источнике [10], однако в патентуемом техническом решении, в отличие от устаревших систем стабилизации, вместо блока гиротахометров применен современный двухплоскостной датчик угловой скорости (11), что позволяет получить, в дополнение к указанным выше, еще два технических результата, а именно позволяет снизить массогабаритные характеристики модуля, а также исключить необходимость технологии настройки взаимовлияния 2-х датчиков угловой скорости: по горизонтали и вертикали. При возникновении нештатной ситуации (поломка или разрушение в бою блоков боевого модуля, отсутствие питающего напряжения и т.п.) используется устройство переключения в ручной режим управления оружием (15), которое освобождает связи оружия с приводами горизонтального (12) и вертикального (13) наведения, после чего ОПУ (1) представляет собою расположенную на транспортном средстве турель с оружием, готовым к использованию в ручном режиме. Это осуществляется следующим образом. При переводе первого рычага (22) Фиг. 2, представляющего собою кулачок, в верхнее положение происходит поворот механизма 16 посредством тяги (23) на оси 17 и выведение шестерни 18 из зацепления, вследствие чего освобождается связь оружия (33) с приводом (12) горизонтального наведения. Аналогично, при переводе второго рычага (30) Фиг. 3 в верхнее положение происходит поворот механизма (24) посредством тяги (31) на оси (25) и выведение шестерни (26) из зацепления, вследствие чего освобождается связь оружия (33) с приводом (13) вертикального наведения.
Боевой модуль с дистанционным управлением отвечает критерию промышленной применимости, поскольку в настоящее время существуют все технологии и комплектующие, необходимые для его производства.
Использованные источники
1. Интернет-ресурс "Армейский вестник", статья от 12 октября 2015 г. "Тенденции развития российских боевых модулей" авт. Д. Федюшко.
http://army-news.ru/2015/10/tendencii-razvitiya-rossijskix-boevyx-modulej/
2. Интернет-ресурс "Военное обозрение" статья от 26 декабря 2013 г. "На крыше: состояние и тенденции в сфере дистанционно управляемых боевых модулей" авт. А. Алексеев.
http://topwar.ru/37736-na-kryshe-sostoyanie-i-tendencii-v-sfere-distancionno-upravlyaemyh-boevyh-moduley.html.
3. Журнал "Национальная оборона" статья от 11 ноября "дистанционно управляемые боевые модули" авт. Л. Московченко, Н. Кузин, А. Власов
http://www.oborona.ru/includes/periodics/defense/2012/0723/16138777/detail.shtml.
4. Интернет-ресурс "Военное обозрение" статья от 15 октября 2015 г. "Проект боевого модуля «Арбалет-ДМ»" авт. К. Рябов
http://topwar.ru/83355-proekt-boevogo-modulya-arbalet-dm.html.
5. Авионика России: Энциклопедический справочник. Научное издание. / Под общей редакцией С.Д. Бодрунова, СПб; Национальная ассоциация авиаприборостроителей, 1999 г., стр. 211.
6. Патент на изобретение RU 2150072, опубл. 27.05.2000 г., бюл. №15.
7. Свидетельство на полезную модель RU 12464, опубл. 10.01.2000 г.
8. Каталог продукции ОАО "МассЭлектроАппарат"/специзделия
http://www.mielap.ru/Vraschayuschiesya_kontaktnye_ustroystva.
9. Журнал "Зарубежное военное обозрение", 1990, N2, 10.
10. Изделие 2Э42-4. Техническое описание и инструкция по эксплуатации. БС1.370.012ТО. 1999 - с. 10. Открытое издание.
К изображению Фиг. 1
1 - ОПУ;
2 - ВКУ;
3 - оптический переход ВКУ;
4 - электрический переход ВКУ;
5 - прицельный комплекс;
6 - блок датчиков метеоусловий;
7 - первый медиаконвертер Ethernet;
8 - система стабилизации оружия;
9 - блок управления приводами;
10 - усилитель мощности;
11 - датчик угловой скорости;
12 - привод горизонтального наведения;
13 - привод вертикального наведения;
14 - блок сопряжения;
15 - устройство переключения в ручной режим управления оружием;
32 - сменное устройство-ложемент;
33 - автоматическое оружие с электроспуском;
34 - система пусковых установок для метания гранат;
35 - формирователь темпа стрельбы и длины пулеметной очереди;
36 - компьютер с видеосмотровым устройством;
37 - пульт управления боевым модулем;
38 - второй медиаконвертер Ethernet;
39 - блок распределения питания;
40 - бортовой источник питания;
48 - датчики состояния люков и дверей.
К изображению Фиг. 2
16 - механизм привода горизонтального наведения;
17 - ось;
18 - шестерня;
19 - погон;
20 - пружина;
21 - натяжитель;
22 - первый рычаг управления устройством переключения в ручной режим управления оружием;
23 - тяга.
К изображению Фиг. 3
24 - механизм привода вертикального наведения;
25 - ось;
26 - шестерня;
27 - сектор;
28 - пружина;
29 - натяжитель;
30 - второй рычаг управления устройством переключения в ручной режим управления оружием;
31 - тяга.
К изображению Фиг. 4
41 - основание пульта;
42 - правая рукоять;
43 - левая рукоять;
44 - тумблеры и кнопки управления;
45 - тумблер разрешения огня;
46 - откидная защитная крышка;
47 - пропорциональный манипулятор (кнюппель).
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой модуль с дистанционным управлением | 2018 |
|
RU2686896C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2828680C1 |
| АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО-УПРАВЛЯЕМЫЙ НАБЛЮДАТЕЛЬНО-ОГНЕВОЙ КОМПЛЕКС | 2018 |
|
RU2718622C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2839637C1 |
| Система управления огнем боевой машины и блок управления автоматикой | 2018 |
|
RU2718186C1 |
| Комплекс вооружения боевой машины с информационно-управляющей системой | 2016 |
|
RU2628027C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| Способ дистанционного поражения оптико-электронных приборов противника | 2022 |
|
RU2786890C1 |
| Устройство для дистанционной стрельбы | 2024 |
|
RU2839417C1 |
Боевой модуль с дистанционным управлением содержит опорно-поворотное устройство (ОПУ), установленное на крышу транспортного средства, компьютер, пульт управления, второй медиаконвертер Ethernet, блок распределения питания, источник питания, расположенные внутри транспортного средства. ОПУ содержит вращающееся контактное устройство (ВКУ) с оптическим и электрическим переходами, прицельный комплекс, блок датчиков метеоусловий, первый медиаконвертер Ethernet, блок сопряжения, сменное устройство-ложемент, автоматическое оружие с автопуском, систему пусковых установок, формирователь темпа стрельбы и длины пулеметной очереди, систему стабилизации оружия с блоком управления, приводами горизонтальной и вертикальной наводки, усилителем мощности, датчиком угловой скорости, устройством переключения в ручной режим, соединенные определенным образом. Пульт управления содержит основание, две эргономические рукояти типа джойстика, пропорциональный манипулятор (кнюппель) на правой рукояти, тумблеры и кнопки управления. Обеспечивается стабилизация приводов наведения, возможность подсчета количества израсходованных боеприпасов, возможность переключения в ручной режим. 6 з.п. ф-лы, 4 ил. 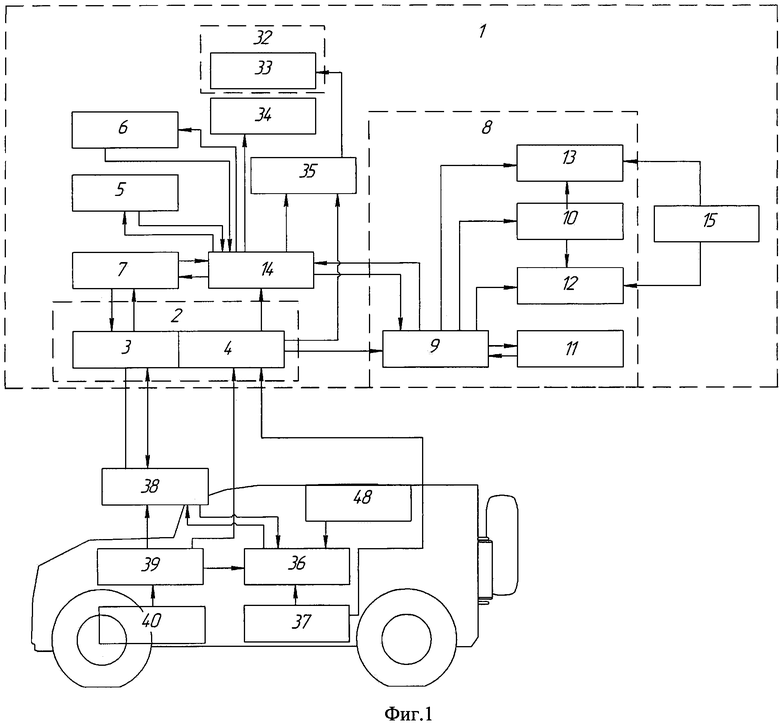
1. Боевой модуль с дистанционным управлением, который включает в себя устанавливаемое на крышу транспортного средства опорно-поворотное устройство (ОПУ), снабженное вращающимся контактным устройством (ВКУ), содержащим как оптический, так и электрический переходы, на ОПУ установлены прицельный комплекс, блок датчиков метеоусловий, первый медиаконвертер Ethernet, система стабилизации оружия, состоящая из блока управления приводами, усилителя мощности, датчика угловой скорости, приводов горизонтального и вертикального наведения, все электронные и электромеханические блоки, расположенные на ОПУ, связаны цепями питания с верхней стороной электрического перехода ВКУ непосредственно или через блок сопряжения, а информационными шинами через первый медиаконвертер Ethernet - с верхней стороной оптического перехода ВКУ, ОПУ снабжено транспортировочными устройствами стопорения качающейся и вращающейся частей, на ОПУ также установлено сменное устройство-ложемент с противооткатным устройством для укрепления в нем определенного типа оружия, а именно пулемета или автоматического гранатомета, снабженного магазинами, трактами подачи боеприпасов и штатным электроспуском, установлена система пусковых установок для метания гранат; боевой модуль также включает в себя расположенные внутри транспортного средства компьютер, объединенный с видеосмотровым устройством, связанный с компьютером пульт управления боевым модулем, включает также второй медиаконвертер Ethernet, блок распределения питания (БРП), причем БРП своим входом соединен с источником бортового питания транспортного средства, а выходами соединен с нижней стороной электрического перехода ВКУ и с блоками модуля, расположенными внутри транспортного средства, информационные и управляющие порты компьютера при этом соединены через второй медиаконвертер Ethernet с нижней стороной оптического перехода ВКУ; отличающийся тем, что в состав боевого модуля введен формирователь темпа и длины пулеметной очереди, входом управления подключенный через блок сопряжения, первый медиаконвертер Ethernet, оптический переход ВКУ и второй медиаконвертер Ethernet к управляющему порту компьютера, а выходом подключенный к электроспуску оружия, кроме того, в ОПУ введено устройство переключения в ручной режим управления оружием, кроме того, пульт управления боевым модулем выполнен в виде основания, которое жестко укреплено на рабочем месте стрелка-оператора, на основании расположены две консольные неподвижные эргономичные рукояти, выполненные на манер рукоятей джойстика, с характерными для джойстика органами управления, между рукоятями располагаются тумблеры и кнопки управления, в том числе тумблер разрешения огня, с возможностью замыкания/размыкания электрической цепи питания формирователя темпа и длины пулеметной очереди, причем указанная цепь замкнута через отдельное контактное кольцо электрического перехода ВКУ, а на правой рукояти пульта размещен пропорциональный манипулятор (кнюппель), адаптированный под большой палец руки стрелка-оператора с функцией управления наведением оружия.
2. Боевой модуль с дистанционным управлением по п. 1, отличающийся тем, что формирователь темпа и длины пулеметной очереди выполнен в виде управляемого от компьютера формирователя импульсного напряжения, с возможностью включения/выключения, ис возможностью управления длительностью импульса и частотой следования импульсов.
3. Боевой модуль с дистанционным управлением по п. 1, отличающийся тем, что тумблер разрешения огня снабжен откидной защитной крышкой.
4. Боевой модуль с дистанционным управлением по п. 1, отличающийся тем, что он дополнительно снабжен автоматом захвата и сопровождения цели, который программно реализован в компьютере.
5. Боевой модуль с дистанционным управлением по п. 1, отличающийся тем, что устройство переключения в ручной режим управления оружия выполнено в виде совокупности рычажных механизмов, связанных с зубчатыми передачами механизмов приводов горизонтального и вертикального наведения, с возможностью включения/выключения кинематических цепей этих механизмов.
6. Боевой модуль с дистанционным управлением по п. 1, отличающийся тем, что в качестве датчика угловой скорости использован двухплоскостной датчик абсолютной угловой скорости.
7. Боевой модуль с дистанционным управлением по п. 1, отличающийся тем, что он дополнительно снабжен двухпозиционными датчиками состояния люков и дверей транспортного средства (открыто/закрыто), связанными с дополнительными информационными портами компьютера.
| Устройство для крепления проволочных выводов в изоляционных основаниях непроволочных сопротивлений | 1959 |
|
SU128927A1 |
| БАШНЯ БРОНЕМАШИНЫ С СИСТЕМОЙ ОРУЖИЯ | 2000 |
|
RU2184333C2 |
| МНОГОЦЕЛЕВОЕ ПРОТИВОТАНКОВОЕ (ЗЕНИТНОЕ) СРЕДСТВО | 2011 |
|
RU2492402C2 |
| US 2013145925 А1, 13.06.2013 | |||
| US 2012024142, 02.02.2012. | |||

