Изобретение относится к военной технике, а именно к робототехническим комплексам для ведения дистанционной работы в боевых условиях.
Известно устройство - боевой четырехколесный робот с радиоуправлением - Mega Huriz Tactical Robot, включающий бронированный корпус, камеры видеонаблюдения и оружие с системой радиоуправляемого наведения. Это устройство предназначается для использования в военных и охранных целях, поисковых и спасательных операциях (см. сайт http://mobbit.info/item/2010/1/15/mega-hurt7-tactical-robot-boevoi-radioypravl)'aeniyi-roboi-dlya-voennyh-celei-video от 24.04.2015 г.).
Недостаток устройства заключается в том, что оно является неустойчивым на наклонных поверхностях в связи с высоким расположением центра тяжести, имеет один вид оружия, открытое воздействию погодных условий и противника.
Из известных наиболее близким по технической сущности является управляемый мобильный робот, содержащий бронированный корпус из керамических пластин с поворотной башенной установкой, ходовую систему с электромоторами-колесами, аккумуляторную систему, дизель-генератор или двигатель внутреннего сгорания, панорамно расположенные на корпусе и на башне видеокамеры, звукоприемную систему самонаведения, блоки управления. Ходовая система содержит телескопические стойки электромоторов-колес, содержащие электромоторы. Кожух видеокамеры содержит защитные передвижные бронированные шторки, механизм замены стекла объектива. Сферическая граната для выстрелов из боевого устройства содержит расположенный во фторопластовой оболочке шарообразный металлический слой. В полости шарообразного металлического слоя расположен шарообразный слой взрывчатого вещества с внутренней полостью, с воздуховодами, проходящими через слои и оболочку, с датчиками давления и взрывателем (Патент RU 2473863. МКИ F4IH 7/00 от 27.01.2013).
Недостаток в том, что в сложной конструкции мобильного робота невозможно разместить дополнительное пулеметное вооружение, кроме сферической гранаты, керамическое покрытие корпуса обладает значительной ударной хрупкостью. Конструкция является дорогой установкой.
Техническим результатом является повышение проходимости, огневой мощи комплекса, расширение задач боевого применения и снижение его стоимости.
Это достигается тем, что ходовая часть состоит и трех пар колес.Первая пара имеет автоматизированное рулевое управление с приводом от электрического двигателя с редуктором. Вторая и третья пары колес ведущие, приводятся в движение управляемыми элетродвигателями с редукторами левого и правого бортов, а оси колес попарно с каждой стороны соединены металлической роликовой цепью, что обеспечивает возможность изменения скорости вращения колес правого и левого бортов, обеспечивая хорошую управляемость комплекса при поворотах. Колеса состоит из ступицы с внутренним сверлением и стакана, свободно перемещающегося в ступице подпружиненных внутри, шины выполнены из набора листовых пружин, параболической формы концы которых закреплены на конических приливах ступицы и стакана. Боковые грани соприкасающихся с грунтом листовых пружин являются грунтозацепами и обеспечивают повышение проходимости машины. Корпус и кабина изготовлены из многослойной брони, включающей твердую резину, вязкотекучую пластмассу и слой броневого листа. К кабине комплекса на подвижных управляемых площадках установлены поражающие системы. Сверху над кабиной оператора 4 ПТУР типа 9К123 «Хризантема» с системой самонаведения обеспечивает поражение танков и легкобронированных целей, на боковинах кабины слева и справа направляющие для укороченных на 1/3 длины ракет типа «Град» с инерциальной системой наведения поражает противника живую силу противника и легкобронированную технику на дистанции от 1000 до 10000 метров. Для наблюдения за полем боя на подвижных управляемых площадках крепятся видеокамеры, совмещенные с прицелами ПТУР и ракет. Управление движением и огнем комплекса осуществляется с окопа или блиндажа при помощи пульта управления с дисплеем. Применение трехслойной брони обеспечивает защиту и безопасность комплекса. Рулевое управление передней парой колес и независимое парное управление колес по бортам обеспечивает высокую маневренность при движении. Использование огневых устройств различного назначения обеспечивает эффективную борьбу с противником, а расположенный на закрытой платформе корпуса дополнительный боекомплект, обеспечивает перезарядку и возобновление стрельбы. Применение аккумуляторной батареи для питания электродвигателей обеспечивает бесшумность движения комплекса. Установленные оптические приборы наблюдения оборудованы защитными фильтрами, позволяющие вести разведку целей и рекогносцировку местности в условиях противодействия лазерному излучению в видимом и ближнем инфракрасном диапазонах длин волн.
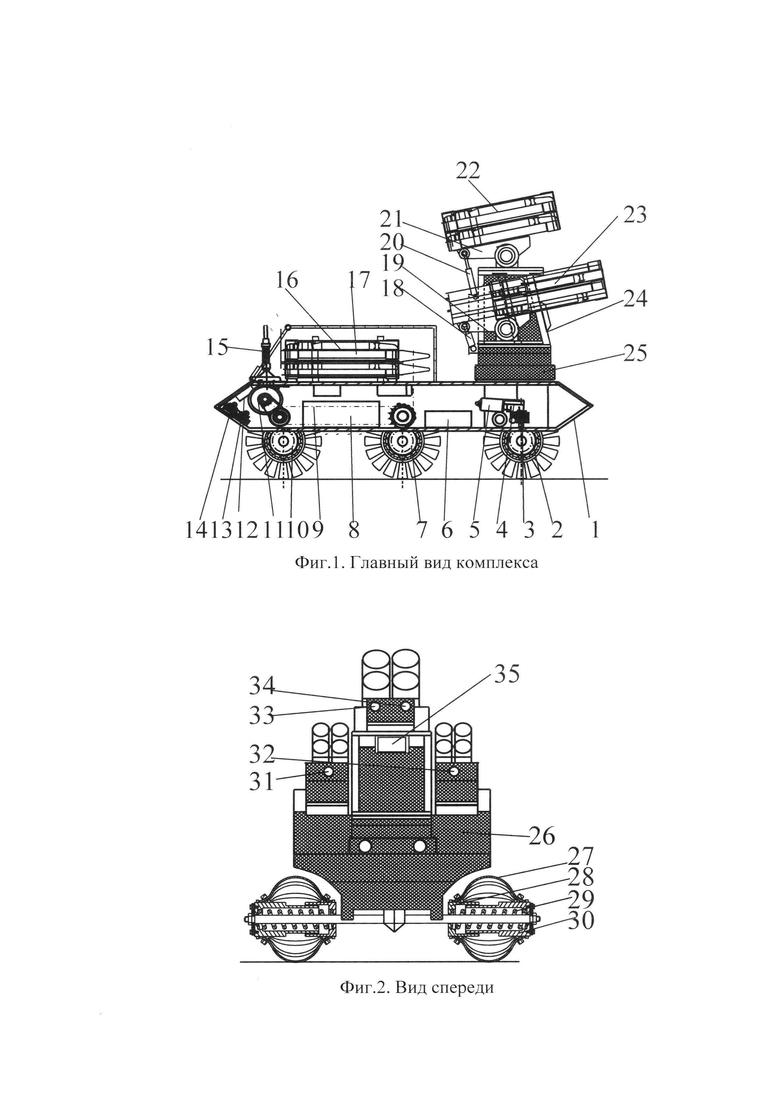
На фиг. 1 схематически изображен главный вид комплекса, на фиг. 2 - вид спереди, на фиг. 3 - пульт. Боевой ударный радиоуправляемый комплекс, содержащий легкобронированную машину 1 с установленным на ней двигателем, трансмиссией, ходовой частью с колесным движителем, в котором передняя пара 2 с рулевым автоматизированным управлением, где поворот колес осуществляется электродвигателем 5 через редуктор 4 и рулевую рейку 3, две задние пары колес 7, 10 соединены цепной передачей 9 и приводятся в движение электродвигателем 11 с радиоуправлением через блок приемника 13 и передатчика 14, соединенных с радиоантенной 15, вооружением и аппаратурой управления, отличающийся тем, что броня 26 выполнена двухслойной, состоящей из слоя броневого листа и жестко закрепленной на нем сетки 8×8 мм из проволоки высоколегированной коррозионностойкой и жаростойкой стали 05 мм, управляется комплекс с пульта фиг. 3 по радиоканалу с передачей видео и звукового сопровождения, либо оператором из кабины 24 и состоит из корпуса 1, в котором расположены ходовая часть, имеющая три пары колес 2,7,10, каждое колесо содержит ступицу 30 (фиг. 2) с внутренним сверлением и стакана 28, свободно перемещающегося в ступице подпружиненных 29 внутри, шины выполнены из набора листовых пружин 27, параболической формы, концы которых закреплены на конических приливах ступицы и стакана, питание электродвигателей и блоков управления осуществляется бортовым источниками питания 8, 6, к кабине 24 комплекса на подвижных вертикально управляемых гидравлическими цилиндрами 18, 20 площадках 19,21 установлены поражающие системы, сверху над кабиной оператора 4 ПТУР типа 9К123 «Хризантема» с системой самонаведения 22, на боковинах кабины слева и справа направляющие для укороченных на 1/3 длины ракет типа «Град» с инерциальной системой наведения 23, для наблюдения за полем боя на подвижных управляемых площадках крепятся видеокамеры 31, 32, 33, 34 совмещенные с прицелами ПТУР 22 и ракет 23, поворот по горизонтали осуществляется поворотной платформой 25, управляемой двигателем с редуктором, вращающим через зубчатое зацепление погон на подшипниках, на котором закреплена кабина 24 с закрепленной спереди поворотной широкоугольной камерой 35, связанной кабелем с бортовым компьютером, расположенным в кабине оператора.
Принцип работы боевого управляемого комплекса заключается в следующем. Конструкция комплекса представляет собой самодвижущее устройство с пультом дистанционного управления с подсоединенным к нему приемопередающим устройством (типа сотового телефона), которое обеспечивает передачу звукового и видеосигналов в тактической глубине на несколько сотен километров. Оператор, управляющий роботом дистанционно, может попеременно или вместе запускать двигатели постоянного тока рулевого управления 5 с реверсом, ходовых колес 11 с реверсом 18, поворотной платформы 25. Такая система электроприводов обеспечивает движение вперед и назад, повороты, разворот на малой площадке. Изображение с видеокамер обзора 35 и систем наведения ПТУР 22 и ракет 23 передается по видеоканалу на монитор пульта оператора, при этом осуществляется контроль пути передвижения и целеуказания, анализ окружающей обстановки. Инфракрасный излучатель обеспечивает работу видеокамер в ночное время. Комплекс управляется по видеорадиоканалам с использованием базовой и рабочих станций ретрансляторов (возможно применение GPS). Электропривод с электродвигателем 11 через цепную передачу приводит во вращение ведущие колеса робота 10. С ведущими колесами 10 цепной передачей 9 попарно с левого и правого борта связаны ведомые колеса 7. Электродвигатель 11 управляется оператором с пульта через блок (фиг. 3). Парные колеса с независимым управлением вместе с рулевым автоматизированным управлением передней парой колес 2 обеспечивают высокую маневренность комплекса. Приемник 13 и передатчик 14. соединенные с антенной 15, обеспечивают передачу информации с блока управления 12 на пульт оператора (фиг. 3) причем оператор видит в экран окружающую местность, путь перемещения комплекса и звуковое сопровождение. При необходимости обеспечения безопасности в корпус 1 устанавливают систему парковки с ультразвуковыми датчиками.
Видеокамера 35, размещенная для наблюдения за пространством перед комплексом, передает информацию в блок управления 12, который через передатчик 14 и информационный канал выдает соответствующую информацию в пульт дистанционного управления. На пульте дистанционного управления информация просматривается на экране монитора и может быть сохранена в соответствующем узле блока. Для получения четкого изображения в темное время рядом с видеокамерой 23 располагают светотехнический аппарат с инфракрасными светильниками.
Оператор через экран монитора анализирует информацию о противнике. Видеокамеры 31, 32, 33, 34 совмещены с прицелами огневых средств: четыре ПТУР 22 и по четыре ракеты в пакетах направляющих 23 справа и слева боковой поверхности кабины 24 размещенных на поворотных управляемых платформах 21, 25. Наведение на цель огневых средств осуществляется оператором, для этого па пульте управления имеются раздельные функциональные кнопки открытия огня выбранным огневым средством. Причем ПТУР 22 применяется для уничтожения танков и бронированных средств, а ракеты применяются для уничтожения живой силы противника и легкобронированных средств.
Боевой управляемый комплекс является простым в управлении как в кабине, и из укрытия, обладает высокими показателями маневренности, подвижности и скорости перемещения, проходимости, имеет качественную боевую вооруженность, способную вести борьбу с танками и бронированными целями противника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2767103C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
| УНИВЕРСАЛЬНЫЙ БОЕВОЙ МОДУЛЬ | 2013 |
|
RU2531421C1 |
| Комплекс маскировки объекта | 2023 |
|
RU2829573C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ КОМПЛЕКС | 2015 |
|
RU2582437C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
Изобретение относится к военной технике, а именно к робототехническим комплексам для ведения дистанционной работы в боевых условиях. Боевой ударный радиоуправляемый комплекс содержит легкобронированную машину (1) с установленным на ней двигателем, трансмиссией, ходовой частью с колесным движителем, в котором передняя пара (1) с рулевым автоматизированным управлением, где поворот колес осуществляется электродвигателем (5) через редуктор (4) и рулевую рейку (3), две задние пары колес (7, 10) соединены цепной передачей (9) и приводятся в движение электродвигателем (11) с радиоуправлением через блок приемника (13) и передатчика (14), соединенных с радиоантенной (15), вооружением и аппаратурой управления. Броня (26) выполнена двухслойной, состоящей из слоя броневого листа и жестко закрепленной на нем сетки 8×8 мм из проволоки высоколегированной коррозионно-стойкой и жаростойкой стали Ø 5 мм, Управляется комплекс с пульта по радиоканалу с передачей видео и звукового сопровождения, либо оператором из кабины (24) и состоит из корпуса, в котором расположены ходовая часть, имеющая три пары колес (2, 7, 10), каждое колесо содержит ступицу с внутренним сверлением, и стакана, свободно перемещающегося в ступице подпружиненных внутри. Шины выполнены из набора листовых пружин параболической формы, концы которых закреплены на конических приливах ступицы и стакана. Питание электродвигателей и блоков управления осуществляется бортовыми источниками питания (6, 8). К кабине (24) комплекса на подвижных вертикально управляемых гидравлическими цилиндрами (18, 20) площадках (19, 21) установлены поражающие системы, сверху над кабиной оператора ПТУР типа 9К123 «Хризантема» с системой самонаведения (22), на боковинах кабины (24) слева и справа направляющие для укороченных на 1/3 длины ракет типа «Град» с инерциальной системой наведения (23). Для наблюдения за полем боя на подвижных управляемых площадках крепятся видеокамеры, совмещенные с прицелами ПТУР и ракет (22, 23), поворот по горизонтали осуществляется поворотной платформой (25), управляемой двигателем с редуктором, вращающим через зубчатое зацепление погон на подшипниках, на котором закреплена кабина (24) с закрепленной спереди поворотной широкоугольной камерой, связанной кабелем с бортовым компьютером, расположенным в кабине оператора. Боевой управляемый комплекс является простым в управлении как в кабине, и из укрытия, обладает высокими показателями маневренности, подвижности и скорости перемещения, проходимости, имеет качественную боевую вооруженность, способную вести борьбу с танками и бронированными целями противника. 3 ил.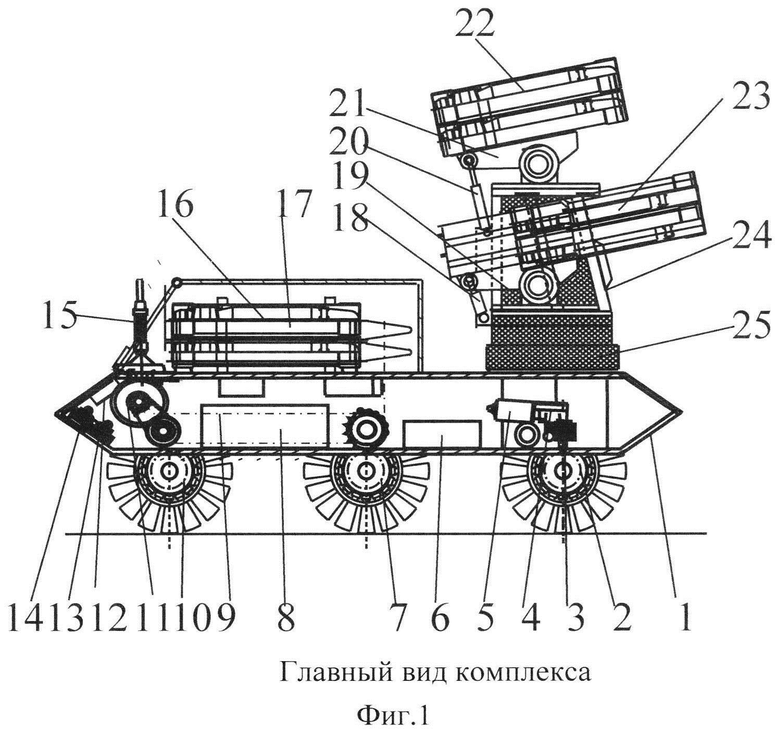
Боевой ударный радиоуправляемый комплекс, содержащий легкобронированную машину с установленным на ней двигателем, трансмиссией, ходовой частью с колесным движителем, в котором передняя пара с рулевым автоматизированным управлением, где поворот колес осуществляется электродвигателем через редуктор и рулевую рейку, две задние пары колес соединены цепной передачей и приводятся в движение электродвигателем с радиоуправлением через блок приемника и передатчика, соединенных с радиоантенной, вооружением и аппаратурой управления, отличающийся тем, что броня выполнена двухслойной, состоящей из слоя броневого листа и жестко закрепленной на нем сетки 8×8 мм из проволоки высоколегированной коррозионно-стойкой и жаростойкой стали Ø 5 мм, управляется комплекс с пульта по радиоканалу с передачей видео и звукового сопровождения, либо оператором из кабины и состоит из корпуса, в котором расположены ходовая часть, имеющая три пары колес, каждое колесо содержит ступицу с внутренним сверлением, и стакана, свободно перемещающегося в ступице подпружиненных внутри, шины выполнены из набора листовых пружин параболической формы, концы которых закреплены на конических приливах ступицы и стакана, питание электродвигателей и блоков управления осуществляется бортовым источниками питания, к кабине комплекса на подвижных вертикально управляемых гидравлическими цилиндрами площадках установлены поражающие системы, сверху над кабиной оператора ПТУР типа 9К123 «Хризантема» с системой самонаведения, на боковинах кабины слева и справа направляющие для укороченных на 1/3 длины ракет типа «Град» с инерциальной системой наведения, для наблюдения за полем боя на подвижных управляемых площадках крепятся видеокамеры, совмещенные с прицелами ПТУР и ракет, поворот по горизонтали осуществляется поворотной платформой, управляемой двигателем с редуктором, вращающим через зубчатое зацепление погон на подшипниках, на котором закреплена кабина с закрепленной спереди поворотной широкоугольной камерой, связанной кабелем с бортовым компьютером, расположенным в кабине оператора.
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |
| Малогабаритный мобильный робототехнический комплекс | 2019 |
|
RU2743130C1 |
| Способ лечения конглобатного подтипа розацеа по точкам | 2023 |
|
RU2811255C1 |

