Область техники
Настоящее изобретение относится к устройству управления гибридным транспортным средством или к устройству для оценки того, начал ли элемент фрикционного сцепления сцепляться (а именно, был ли выбран зазор элемента фрикционного сцепления), при этом элемент фрикционного сцепления сцепляется, когда находится в диапазоне приведения в движение.
Уровень техники
Традиционно, известно устройство управления электрическим гибридным транспортным средством, которое оценивает, что вторая муфта (а именно, пусковая муфта) автоматической коробки передач начала сцепляться в ответ на условие того, что нагрузка мотор-генератора достигла заданной нагрузки, когда операция переключения с N-диапазона на D-диапазон выполняется при условии того, что транспортное средство неподвижно (см. например, патентный документ 1).
Патентный документ
Патентный документ
1: JP 2009-190584 A
Задачи, которые должны быть решены изобретением
Однако традиционное устройство управления электрическим гибридным транспортным средством сконфигурировано, чтобы начинать оценку начала сцепления относительно второй муфты во время операции переключения с N-диапазона на D-диапазон. Соответственно, если операция переключения с N-диапазона на D-диапазон выполняется, когда скорость вращения холостого хода двигателя падает с высокой скорости вращения холостого хода до нормальной скорости вращения холостого хода, может быть трудность в том, что сцепление второй муфты некорректно оценивается как начавшееся непосредственно после того, как выполнена операция переключения с N-диапазона на D-диапазон.
Например, если скорость вращения двигателя продолжает снижаться с высокой скорости вращения холостого хода до нормальной скорости вращения холостого хода, когда транспортное средство неподвижно с выбранным N-диапазоном и двигателем в холодном состоянии, нагрузка мотор-генератора уменьшается, чтобы способствовать уменьшению скорости вращения двигателя. Когда управление скоростью вращения мотора переключается на управление для поддержания постоянной целевой скорости вращения в ответ на операцию переключения с N-диапазона на D-диапазон в этих условиях, нагрузка мотор-генератора быстро увеличивается из пониженного состояния, вызывая некорректную оценку того, что увеличение нагрузки мотор-генератора указывает начало сцепления второй муфты.
Настоящее изобретение осуществлено, принимая во внимание проблемы, описанные выше. Задачей настоящего изобретения является создание устройства управления гибридным транспортным средством, способного предотвращать некорректную оценку начала сцепления элемента фрикционного сцепления, когда вращательные колебания источника приведения в движение вызваны внешним фактором, отличным от начала сцепления элемента фрикционного сцепления.
Средства решения задач
Для решения описанной выше задачи, согласно настоящему изобретению, создано устройство управления гибридным транспортным средством, содержащее источник приведения в движение, элемент фрикционного сцепления, средство управления поддержанием входной скорости вращения и средство оценки начала сцепления. Источник приведения в движение включает в себя двигатель и мотор. Элемент фрикционного сцепления предусмотрен на пути передачи движущей силы от источника приведения в движение к ведущему колесу, при этом элемент фрикционного сцепления сцепляется, когда выбирается диапазон приведения в движение. Средство управления поддержанием входной скорости вращения выполняет, посредством управления скоростью вращения мотора, управление для поддержания входной скорости вращения элемента фрикционного сцепления в целевой скорости вращения, которая равна входной скорости вращения в начале управления сцеплением элемента фрикционного сцепления. Средство оценки начала сцепления оценивает в ответ на условие, что элемент фрикционного сцепления начал сцепляться, при этом условие является условием того, что параметр превысил или стал равным предварительно определенному пороговому значению в начальной области управления сцеплением элемента фрикционного сцепления, при этом параметр изменяется вместе с вращательными колебаниями источника приведения в движение. Средство оценки начала сцепления начинает оценку после ожидания условия того, что становится возможным оценивать затухание вращательных колебаний источника приведения в движение, вызванных внешним фактором, отличным от начала сцепления элемента фрикционного сцепления, после времени начала управления началом сцепления элемента фрикционного сцепления.
Преимущества изобретения
Соответственно, оценка начинается после ожидания истечения временного периода запрета оценки начала сцепления, при этом временной период запрета оценки начала сцепления определяется как временной период от времени начала управления началом сцепления элемента фрикционного сцепления до времени, когда становится возможно оценивать затухание вращательных колебаний источника приведения в движение, вызванных внешним фактором, отличным от начала сцепления элемента фрикционного сцепления. Соответственно, оценка начала сцепления приостанавливается до затухания вращательных колебаний источника приведения в движение, даже если источник приведения в движение вращательно колеблется вследствие внешнего фактора, отличного от начала сцепления элемента фрикционного сцепления, и параметр, таким образом, значительно изменяется. Затем, при затухании вращательных колебаний источника приведения в движение вследствие внешнего фактора, отличного от начала сцепления элемента фрикционного сцепления, начинается оценка начала сцепления для элемента фрикционного сцепления. Следовательно, если параметр значительно изменяется вследствие внешнего фактора непосредственно после начала управления сцеплением элемента фрикционного сцепления, некорректная оценка начала сцепления элемента фрикционного сцепления не выполняется. В результате, возможно предотвращать некорректную оценку начала сцепления элемента фрикционного сцепления, когда источник приведения в движение вращательно неустойчив вследствие внешнего фактора, отличного от начала сцепления элемента фрикционного сцепления.
Краткое описание чертежей
Фиг.1 - схема всей системы, показывающая FR-гибридное транспортное средство, к которому применяется устройство управления согласно первому варианту осуществления.
Фиг.2 - схема, показывающая пример карты переключения автоматической коробкой "AT" передач, которая задается в AT-контроллере 7 согласно первому варианту осуществления.
Фиг.3 - схема, показывающая пример карты выбора EV-HEV, которая задается в части выбора режима объединенного контроллера 10 согласно первому варианту осуществления.
Фиг.4 - скелетная схема, показывающая пример автоматической коробки AT передач, установленной на FR-гибридном транспортном средстве, к которому применяется устройство управления согласно первому варианту осуществления.
Фиг.5 - таблица операции сцепления, показывающая состояния сцепления элементов фрикционного сцепления на отдельных передачах в автоматической коробке AT передач, установленной на FR-гибридном транспортном средстве, к которому применяется устройство управления согласно первому варианту осуществления.
Фиг.6 - блок-схема последовательности операций, показывающая ход процесса оценки начала сцепления для второго тормоза B2 (а именно, тормоза LOW/B низших передач), который выполняется объединенным контроллером, когда операция переключения с N-диапазона на D-диапазон выполняется в первом варианте осуществления.
Фиг.7 - карта пороговых значений степени изменения входной скорости вращения, показывающая относительные характеристики степени изменения входной скорости вращения относительно входной скорости вращения, которая используется в операции оценки начала сцепления второго тормоза B2, показанной на фиг.6.
Фиг.8 - карта пороговых значений величины изменения крутящего момента мотора, показывающая относительные характеристики величины изменения крутящего момента мотора относительно входной скорости вращения, которая используется в операции оценки начала сцепления для второго тормоза B2, показанной на фиг.6.
Фиг.9 - диаграмма, показывающая пример экспериментальных данных степени изменения входной скорости вращения относительно входной скорости вращения, которая показывает область, где может быть установлено пороговое значение степени изменения входной скорости вращения.
Фиг.10 - диаграмма, показывающая пример экспериментальных данных величины изменения крутящего момента мотора относительно входной скорости вращения, которая показывает область, где может быть установлено пороговое значение величины изменения крутящего момента мотора.
Фиг.11 - иллюстративная диаграмма, показывающая пример характеристик настроек порогового значения величины изменения крутящего момента мотора, который основан на экспериментальных данных и сравнительном примере.
Фиг.12 - временная диаграмма, показывающая характеристики сигнала диапазона, входной скорости вращения, крутящего момента мотора и командного давления на второй тормоз B2, когда операция переключения с N-диапазона на D-диапазон выполняется, в то время как скорость вращения уменьшается с высокой скорости вращения холостого хода до нормальной скорости вращения холостого хода, согласно сравнительному примеру.
Фиг.13 - временная диаграмма, показывающая характеристики сигнала диапазона, входной скорости вращения, крутящего момента мотора и командного давления на второй тормоз B2, когда операция переключения с N-диапазона на D-диапазон выполняется, в то время как скорость вращения уменьшается с высокой скорости вращения холостого хода до нормальной скорости вращения холостого хода, согласно первому варианту осуществления.
Фиг.14 - блок-схема последовательности операций, показывающая последовательность операций настройки временного периода запрета вычисления оценки выбирания зазора (минимальный временной период выполнения выбирания зазора) согласно второму варианту осуществления.
Фиг.15 - иллюстративная диаграмма, показывающая пример таблицы для настройки минимального временного периода выполнения выбирания зазора.
Способы осуществления изобретения
Последующее описание описывает наилучшую форму осуществления устройства управления гибридным транспортным средством согласно настоящему изобретению со ссылкой на первый вариант осуществления и второй вариант осуществления, показанные на чертежах.
Первый вариант осуществления изобретения
Во-первых, последующее описание описывает конфигурацию устройства управления FR-гибридного транспортного средства типа "один мотор, две муфты" (пример гибридного транспортного средства) согласно первому варианту осуществления и это будет описано отдельно в разделах "Конфигурация всей системы", "Конфигурация автоматической коробки передач" и "Конфигурация процесса оценки начала сцепления".
Конфигурация всей системы
Фиг.1 показывает FR-гибридное транспортное средство, к которому применяется устройство управления согласно первому варианту осуществления. Фиг.2 показывает пример карты переключения автоматической коробки "AT" передач, которая задается в AT-контроллере 7 согласно первому варианту осуществления. Фиг.3 показывает пример карты выбора EV-HEV, которая задается в части выбора режима объединенного контроллера 10 согласно первому варианту осуществления. Последующее описание описывает конфигурацию всей системы со ссылкой на фиг. 1-3.
Как показано на фиг.1, трансмиссия FR-гибридного транспортного средства включает в себя двигатель "Eng", маховик "FW", первую муфту CL1, мотор-генератор "MG" (мотор), вторую муфту CL2, автоматическую коробку AT передач, входной вал "IN" коробки передач, главный маслонасос "M-O/P", вспомогательный маслонасос "S-O/P", карданный вал "PS", шестерню "DF" дифференциала, левый ведущий вал "DSL", правый ведущий вал "DSR", левое заднее колесо "RL" (ведущее колесо) и правое заднее колесо "RR" (ведущее колесо). "FL" представляет левое переднее колесо, а "FR" представляет правое переднее колесо.
Двигатель Eng является бензиновым двигателем или дизельным двигателем, который управляется на основе команды управления двигателем от контроллера 1 двигателя, так что выполняются управление запуском двигателя, управление остановкой двигателя, управление открытием дроссельной заслонки, управление прекращением подачи топлива и другие. Маховик FW присоединен к выходному валу двигателя.
Первая муфта CL1 размещена между двигателем Eng и мотор-генератором MG и управляется, чтобы полностью сцепляться, или сцепляться с возможностью проскальзывания, или полностью расцепляться посредством управляющего гидравлического давления первой муфты, которое создается посредством гидравлического блока 6 первой муфты на основе управляющей команды первой муфты от контроллера 5 первой муфты.
Мотор-генератор MG является синхронным мотор-генератором, в котором постоянный магнит вставлен в ротор, и обмотка статора обмотана вокруг статора. Мотор-генератор MG управляется на основе управляющей команды от контроллера 2 мотора, так что трехфазные переменные токи генерируются и прикладываются к мотор-генератору MG посредством инвертора 3. Мотор-генератор MG может функционировать в качестве мотора, который вращается на основе подачи энергии от аккумулятора 4 ("движение от электрической мощности"), и функционировать также в качестве электрогенератора, чтобы заряжать аккумулятор 4, посредством формирования электродвижущей силы между концами обмотки статора, когда ротор получает вращательную энергию от двигателя Eng и ведущих колес ("рекуперация"). Ротор мотор-генератора MG соединен с входным валом IN коробки передач для автоматической коробки AT передач.
Вторая муфта CL2 размещается между мотор-генератором MG и левым и правым задними колесами RL, RR. Вторая муфта CL2 является элементом сцепления для начала движения, который сцепляется, когда выполняется операция переключения с N-диапазона на D-диапазон (или R-диапазон). Вторая муфта CL2 управляется, чтобы быть полностью сцепленной, сцепленной с возможностью проскальзывания или полностью расцепленной, посредством управляющего гидравлического давления, которое создается посредством гидравлического блока 8 второй муфты на основе команды управления второй муфтой от AT-контроллера 7. Например, вторая муфта CL2 реализована посредством обычно разомкнутой многодисковой муфты мокрого типа или тормоза, при этом скорость потока и гидравлическое давление рабочей жидкости может управляться непрерывно посредством электромагнитного пропорционального клапана. Гидравлический блок 6 первой муфты и гидравлический блок 8 второй муфты установлены в блоке управления гидравлическим клапаном "CVU", который предусмотрен с автоматической коробкой AT передач.
Автоматическая коробка AT передач размещает вторую муфту CL2 в качестве элемента сцепления.
Автоматическая коробка AT передач является коробкой передач, которая автоматически переключается между множеством ступенчатых положений передач, в зависимости от скорости транспортного средства и открытия педали акселератора.
Входной вал IN коробки передач для автоматической коробки AT передач (а именно, вал мотора) снабжен главным маслонасосом M-O/P, который приводится в действие посредством входного вала IN коробки передач. Вспомогательный маслонасос S-O/P предусмотрен в корпусе мотора или т.п. Вспомогательный маслонасос S-O/P приводится в действие мотором для пресечения падения гидравлического давления, когда сброс давления главного маслонасоса M-O/P является коротким, в то время как транспортное средство неподвижно или как в аналогичных случаях. Управление приведением в действие вспомогательного маслонасоса S-O/P выполняется AT-контроллером 7, описанным ниже. Выходной вал коробки передач для автоматической коробки AT передач соединяется с карданным валом PS. Карданный вал PS соединяется с левым и правым задними колесами RL, RR через шестерню DF дифференциала, левый ведущий вал DSL и правый ведущий вал DSR.
Гибридное транспортное средство применяет режимы приведения в движение, которые отличаются по форме приведения в движение, при этом режимы приведения в движение включают в себя режим электрического транспортного средства (в дальнейшем называемый "EV-режимом"), режим гибридного транспортного средства (в дальнейшем называемый "HEV-режимом") и режим управления крутящим моментом приведения в движение (в дальнейшем называемый "WSC-режимом").
EV-режим представляет собой режим, в котором первая муфта CL1 расцеплена, и транспортное средство приводится в движение только посредством движущей силы мотор-генератора MG. EV-режим включает в себя режим приведения в движение от мотора и режим рекуперативного приведения в движение. EV-режим выбирается, например, когда требуемая движущая сила является небольшой, и SOC аккумулятора является достаточным.
HEV-режим - это режим, в котором транспортное средство приводится в движение со сцепленной первой муфтой CL1. HEV-режим включает в себя режим приведения в движение с помощью мотора, режим выработки электрической энергии и режим приведения в движение от двигателя, один из которых выбирается для движения транспортного средства. HEV-режим выбирается, например, когда требуемая движущая сила является большой, или когда SOC аккумулятора недостаточно.
WSC-режим - это режим, в котором вторая муфта CL2 сцеплена с возможностью проскальзывания, и максимальный крутящий момент второй муфты CL2 управляется так, что передаваемый муфтой крутящий момент, проходящий через вторую муфту CL2, удовлетворяет требуемому крутящему моменту приведения в движение, определенному в зависимости от операции водителя или т.п. WSC-режим выбирается, когда скорость вращения ведущего колеса получается ниже скорости вращения двигателя, так что необходимо компенсировать дифференциальное вращение между ними посредством проскальзывания второй муфты CL2, например, когда транспортное средство неподвижно или находится в области начала ускорения.
Последующее описание описывает систему управления FR-гибридного транспортного средства. Как показано на фиг.1, система управления FR-гибридного транспортного средства включает в себя контроллер 1 двигателя, контроллер 2 мотора, инвертор 3, аккумулятор 4, контроллер 5 первой муфты, гидравлический блок 6 первой муфты, AT-контроллер 7, гидравлический блок 8 второй муфты, контроллер 9 тормоза и объединенный контроллер 10. Контроллеры 1, 2, 5, 7 и 9 и объединенный контроллер 10 соединены через CAN-линию 11 связи для обмена информацией друг с другом.
Контроллер 1 двигателя принимает входную информацию о скорости вращения двигателя от датчика 12 скорости вращения двигателя и входную команду целевого крутящего момента двигателя от объединенного контроллера 10 и входную другую необходимую информацию. Контроллер 11 двигателя выводит команду для управления рабочей точкой двигателя (Ne, Te) актуатору дроссельной заслонки двигателя Eng и другим.
Мотор-генератор 2 принимает входную информацию от датчика 13 положения, который обнаруживает угловое положение ротора мотор-генератора MG и входную команду целевого крутящего момента MG и команду целевой скорости вращения MG от объединенного контроллера 10 и входную другую необходимую информацию. Контроллер 2 мотора выводит инвертору 3 команду для управления рабочей точкой мотора (Nm, Tm) мотор-генератора MG. Контроллер 2 мотора наблюдает за SOC аккумулятора, указывающим состояние заряда аккумулятора 4, и предоставляет информацию о SOC аккумулятора объединенному контроллеру 10 через CAN-линию 11 связи.
Контроллер 5 первой муфты принимает входную информацию датчика от датчика 15 хода первой муфты, который обнаруживает положение хода поршня 14a гидравлического актуатора 14 и входную команду целевого крутящего момента CL1 от объединенного контроллера 10 и входную другую необходимую информацию. Контроллер 5 первой муфты выводит команду для управления сцеплением и расцеплением первой муфты CL1 гидравлическому блоку 6 первой муфты в блоке CVU управления гидравлическим клапаном.
AT-контроллер 7 принимает входную информацию от датчика 16 открытия акселератора, датчика 17 скорости транспортного средства, переключателя 18 нейтрали и т.д. Когда транспортное средство движется с выбранным D-диапазоном, оптимальное положение передачи определяется на основе положения рабочей точки в карте переключения, показанной на фиг. 2, при этом рабочая точка определяется посредством открытия APO педали акселератора и скорости VSP транспортного средства, и управляющая команда для получения найденного положения передачи выводится блоку CVU управления гидравлическим клапаном. В дополнение к этому управлению переключением, если команда целевого крутящего момента CL2 вводится от объединенного контроллера 10, выполняется управление второй муфтой, чтобы выводить команду для управления сцеплением с возможностью проскальзывания второй муфты CL2 гидравлическому блоку 8 второй муфты в блоке CVU управления гидравлическим клапаном.
Контроллер 9 тормоза принимает входную информацию датчика от датчика 19 скорости вращения колеса для измерения скорости вращения колеса каждого из четырех колес и датчика 20 хода тормоза и входную команду управления совместной рекуперацией от объединенного контроллера 10 и входную другую необходимую информацию. Например, когда педаль тормоза нажимается для торможения, и запрошенное тормозное усилие, вычисленное из хода BS тормоза, не удовлетворяется только посредством рекуперативного тормозного усилия, контроллер 9 тормоза выполняет управление совместным рекуперативным торможением для покрытия нехватки с помощью механического тормозного усилия (гидравлического тормозного усилия или усилия торможения мотором).
Объединенный контроллер 10 управляет потребляемой энергией всего транспортного средства и функционирует, чтобы предоставлять возможность транспортному средству двигаться с оптимизированной эффективностью. Объединенный контроллер 10 принимает входную необходимую информацию от датчика 21 скорости вращения мотора для измерения скорости Nm вращения мотора и других датчиков, переключателей и т.д. 22 и входную информацию через CAN-линию 11 связи. Объединенный контроллер 10 выводит команду целевого крутящего момента двигателя контроллеру 1 двигателя, команду целевого крутящего момента MG и команду целевой скорости вращения MG контроллеру 2 мотора, команду целевого крутящего момента CL1 контроллеру 5 первой муфты, команду целевого крутящего момента CL2 AT-контроллеру 7 и команду управления совместным рекуперативным торможением контроллеру 9 тормоза.
Объединенный контроллер 10 включает в себя секцию выбора режима, которая определяет оптимальный режим приведения в движение в зависимости от позиции рабочей точки на карте выбора EV-HEV, показанной на фиг.3, при этом рабочая точка определяется посредством открытия APO педали акселератора и скорости VSP транспортного средства, и выбирает найденный режим приведения в движение в качестве целевого режима приведения в движение. В карте выбора EV-HEV заданы линия переключения с EV на HEV для переключения из EV-режима в HEV-режим, линия переключения с HEV на EV для переключения из HEV-режима в EV-режим, и линия переключения с WSC на HEV для переключения из WSC-режима на HEV-режим. Линия переключения с EV на HEV и линия переключения с HEV на EV заданы с величиной гистерезиса. Линия переключения с WSC на HEV задана согласно первой заданной скорости VSP1 транспортного средства, с которой двигатель Eng поддерживает скорость вращения холостого хода в положении первой передачи автоматической коробки AT передач. Однако, когда SOC аккумулятора становится ниже или равно предварительно определенному значению, в то время как выбран EV-режим, целевой режим приведения в движение принудительно устанавливается в HEV-режим.
Конфигурация автоматической коробки передач
Фиг.4 показывает пример автоматической коробки AT передач, установленной на FR-гибридном транспортном средстве, к которой применяется устройство управления согласно первому варианту осуществления. Фиг.5 показывает состояния сцепления элементов фрикционного сцепления на отдельных передачах в автоматической коробке AT передач, установленной на FR-гибридном транспортном средстве, к которой применяется устройство управления согласно первому варианту осуществления. Последующее описание описывает конфигурацию автоматической коробки AT передач со ссылкой на фиг.4 и 5.
Автоматическая коробка AT передач является ступенчатой автоматической коробкой передач с семью передачами переднего хода и одной передачей заднего хода. Автоматическая коробка AT передач принимает входную движущую силу, по меньшей мере, одного из двигателя Eng и мотор-генератора MG через входной вал "Input" коробки передач, и переключает скорость вращения посредством четырех планетарных шестерен и семи элементов фрикционного сцепления и выводит ее через выходной вал "Output" коробки передач.
Автоматическая коробка AT передач включает в себя зубчатый механизм переключения передач, включающий в себя первый планетарный набор GS1 и второй планетарный набор GS2, которые размещены вдоль оси, протягивающейся от входного вала Input коробки передач к выходному валу Output коробки передач. Первый планетарный набор GS1 включает в себя первую планетарную передачу G1 и вторую планетарную передачу G2. Второй планетарный набор GS2 включает в себя третью планетарную передачу G3 и четвертую планетарную передачу G4. Более того, первая муфта C1, вторая муфта C2, третья муфта C3, первый тормоз B1, второй тормоз B2, третий тормоз B3 и четвертый тормоз B4 размещены в качестве элементов фрикционного сцепления. Кроме того, размещены первая односторонняя муфта F1 и вторая односторонняя муфта F2.
Первая планетарная передача G1 включает в себя первую солнечную шестерню S1, первую коронную шестерню R1, первый сателлит P1 и первое водило PC1. Вторая планетарная передача G2 включает в себя вторую солнечную шестерню S2, вторую коронную шестерню R2, второй сателлит P2 и второе водило PC2. Третья планетарная передача G3 включает в себя третью солнечную шестерню S3, третью коронную шестерню R3, третий сателлит P3 и третье водило PC3. Четвертая планетарная передача G4 включает в себя четвертую солнечную шестерню S4, четвертую коронную шестерню R4, четвертый сателлит P4 и четвертое водило PC4. А именно, первая-четвертая планетарные передачи G1-G4 являются планетарными передачами с одним сателлитом.
Входной вал Input коробки передач соединен со второй коронной шестерней R2 и принимает входной крутящий момент приведения в движение, по меньшей мере, от одного из двигателя Eng и мотор-генератора MG. Выходной вал Output коробки передач соединен с третьим водилом PC3 и передает выходной крутящий момент приведения в движение через редуктор и т.п. ведущим колесам (левому и правому задним колесам RL, RR).
Первая коронная шестерня R1, второе водило PC2 и четвертая коронная шестерня R4 соединены вместе посредством первого соединительного элемента M1. Третья коронная шестерня R3 и четвертое водило PC4 соединены вместе посредством второго соединительного элемента M2. Первая солнечная шестерня S1 и вторая солнечная шестерня S2 соединены вместе посредством третьего соединительного элемента M3.
Первая муфта C1 (а именно, входная муфта I/C) выборочно соединяет входной вал Input коробки передач со вторым соединительным элементом M2 и отсоединяет входной вал Input коробки передач от второго соединительного элемента M2. Вторая муфта C2 (а именно, муфта D/C прямой передачи) выборочно соединяет четвертую солнечную шестерню S4 с четвертым водилом PC4 и отсоединяет четвертую солнечную шестерню S4 от четвертого водила PC4. Третья муфта C3 (а именно, H&LR муфта H&LR/C) выборочно соединяет третью солнечную шестерню S3 с четвертой солнечной шестерней S4 и отсоединяет третью солнечную шестерню S3 от четвертой солнечной шестерни S4. Вторая односторонняя муфта F2 (а именно, односторонняя муфта 1&2OWC первой и второй передачи) предусмотрена между третьей солнечной шестерней S3 и четвертой солнечной шестерней S4 и выборочно соединяется и отсоединяется механически. Первый тормоз B1 (а именно, передний тормоз Fr/B) выборочно удерживает первое водило PC1 неподвижно относительно картера "Case" коробки передач и предоставляет возможность первому водилу PC1 вращаться относительно картера Case коробки передач. Первая односторонняя муфта F1 (а именно, односторонняя муфта 1stOWC первой передачи) размещена параллельно первому тормозу B1 и выборочно соединяется и отсоединяется механически. Второй тормоз B2 (а именно, тормоз LOW/B нижней передачи) выборочно удерживает третью солнечную шестерню S3 неподвижно относительно картера Case коробки передач и предоставляет возможность третьей солнечной шестерне S3 вращаться относительно картера Case коробки передач. Третий тормоз B3 (а именно, 2346-тормоз "2346/B") выборочно удерживает третий соединительный элемент M3 неподвижным относительно картера Case коробки передач и предоставляет возможность третьему соединительному элементу M3 вращаться относительно картера Case коробки передач, при этом третий соединительный элемент M3 соединяет первую солнечную шестерню S1 и вторую солнечную шестерню S2 вместе. Четвертый тормоз B4 (а именно, тормоз R/B заднего хода) выборочно удерживает третье водило PC3 неподвижным относительно картера Case коробки передач и предоставляет возможность третьему водилу PC3 вращаться относительно картера Case коробки передач.
Последующее описание описывает операцию сцепления в каждом положении передачи со ссылкой на фиг.5. В таблице операции сцепления на фиг.5 каждый незаштрихованный кружок представляет условия, в которых соответствующий элемент фрикционного сцепления гидравлически вовлекается в состояние приведения в движение, а каждый заключенный в скобки незаштрихованный кружок представляет условия, в которых соответствующий элемент фрикционного сцепления гидравлически вовлекается в состояние движения по инерции (он функционирует как односторонняя муфта в состоянии приведения в движение), и каждая пустая ячейка представляет условия, в которых соответствующий элемент фрикционного сцепления расцеплен.
Каждое из семи положений передач получается посредством переключателя сцепления, включающего в себя переключение одного из элементов фрикционного сцепления, предусмотренных в зубчатом механизме переключения передач, сконструированном, как описано выше, из сцепленного состояния в расцепленное состояние, и переключение другого из элементов фрикционного сцепления из расцепленного состояния в сцепленное состояние, как описано ниже. Кроме того, получается одно положение передачи заднего хода.
На первой передаче сцеплены первый тормоз B1 (со сцеплением первой однонаправленной муфты F1) и третья муфта C3 (со сцеплением второй однонаправленной муфты F2) и второй тормоз B2. На второй передаче сцеплены третья муфта C3 (со сцеплением второй однонаправленной муфты F2) и второй тормоз B2 и третий тормоз B3. На третьей передаче сцеплены второй тормоз B2, третий тормоз B3 и вторая муфта C2. На четвертой передаче сцеплены третий тормоз B3, вторая муфта C2 и третья муфта C3. На пятой передаче сцеплены первая муфта C1, вторая муфта C2 и третья муфта C3. На шестой передаче сцеплены третий тормоз B3, первая муфта C1 и третья муфта C3. На седьмой передаче сцеплены первый тормоз B1 (со сцеплением первой односторонней муфты F1) и первая муфта C1 и третья муфта C3. На передаче заднего хода сцеплены четвертый тормоз B4, первый тормоз B1 и третья муфта C3. Таким образом, во время переключения с N-диапазона на D-диапазон сцепляется второй тормоз B2 (а именно, тормоз LOW/B низших передач). Соответственно, второй тормоз B2 является элементом фрикционного сцепления, на который нацелена оценка начала сцепления согласно первому варианту осуществления.
Конфигурация процесса оценки начала сцепления
Фиг.6 представляет собой блок-схему последовательности операций, показывающая последовательность операций процесса оценки начала сцепления относительно второго тормоза B2 (а именно, тормоза LOW/B низших передач), который выполняется посредством объединенного контроллера 10, когда выполняется операция переключения с N-диапазона на D-диапазон, согласно первому варианту осуществления. Последующее описание описывает этапы на фиг.6, которые составляют процесс оценки начала сцепления. Процесс управления на фиг.6 выполняется многократно с интервалами предварительно определенного периода времени начала управления.
На этапе S1 объединенный контроллер 10 оценивает, выполнена или нет операция переключения с N-диапазона на D-диапазон на основе переключения сигнала положения диапазона от переключателя 18 нейтрали с сигнала N-диапазона на сигнал D-диапазона. Когда ответ - да (когда операция переключения с N-диапазона на D-диапазон выполнена), процесс переходит к этапу S3. Когда ответ - нет (когда выбран N-диапазон), процесс переходит к этапу S2.
На этапе S2, следом за оценкой на этапе S1 того, что выбирается N-диапазон, объединенный контроллер 10 выполняет управление скоростью вращения мотора, в котором целевая скорость вращения устанавливается в целевую скорость вращения холостого хода (переменная скорость вращения) и переходит к окончанию процесса. Целевая скорость вращения холостого хода устанавливается в высокую скорость вращения холостого хода, когда температура охлаждающей жидкости двигателя находится в очень низком температурном диапазоне, при этом высокая скорость вращения холостого хода выше обычной скорости вращения холостого хода. Когда температура охлаждающей жидкости двигателя растет посредством операции прогрева, целевая скорость вращения холостого хода устанавливается постепенно снижающейся с высокой скорости вращения холостого хода до нормальной скорости вращения холостого хода. После того, как температура охлаждающей жидкости двигателя превышает или становится равной предварительно определенной температуре, целевая скорость вращения холостого хода удерживается в нормальной скорости вращения холостого хода.
На этапе S3, следом за оценкой на этапе S1, что операция переключения с N-диапазона на D-диапазон выполнена, объединенный контроллер 10 переключает целевую скорость вращения с целевой скорости вращения в управлении скоростью вращения мотора, когда выбран N-диапазон (переменная скорость вращения), на входную скорость вращения коробки передач во время операции переключения с N-диапазона на D-диапазон (фиксированная скорость вращения), и затем процесс переходит к этапу S4 (средство управления поддерживает входную скорость вращения). А именно, после операции переключения с N-диапазона на D-диапазон управление скоростью вращения мотора выполняется с тем, чтобы удерживать входную скорость вращения коробки передач во время операции переключения с N-диапазона на D-диапазон.
На этапе S4, следом за переключением целевой скорости вращения в управлении скоростью вращения мотора на этапе S3, объединенный контроллер 10 подсчитывает время таймера, прошедшее после ND-переключения, которое указывает период времени, прошедший после операции переключения с N-диапазона на D-диапазон, и затем процесс переходит к этапу S5.
На этапе S5, следом за подсчетом времени таймера, прошедшего после ND-переключения на этапе S4, объединенный контроллер 10 выполняет операцию вычисления для вычисления величины изменения входной скорости вращения, которая является величиной уменьшения скорости вращения от входной скорости вращения коробки передач во время операции переключения с N-диапазона на D-диапазон, и затем процесс переходит к этапу S6.
На этапе S6, следом за операцией вычисления величины изменения входной скорости вращения на этапе S5, объединенный контроллер 10 определяет, превышает или нет время таймера, прошедшее после ND-переключения, или становится равным временному периоду запрета вычисления оценки выбирания зазора, а именно, прошел или нет предварительно определенный временной период после времени начала управления сцеплением второго тормоза B2 в качестве элемента фрикционного сцепления до времени, когда становится возможно оценивать затухание вращательных колебаний источника приведения в движение вследствие внешнего фактора, отличного от начала сцепления второго тормоза B2. Когда ответ - да (время таймера, прошедшее после ND-переключения ≥ временного периода запрета вычисления оценки выбирания зазора), процесс переходит к этапу S7. Когда ответ - нет (время таймера, прошедшее после ND-переключения < временного периода запрета вычисления оценки выбирания зазора), процесс возвращается к этапу S4. Временной период запрета вычисления оценки выбирания зазора устанавливается во временной период, когда возможна некорректная оценка выбирания зазора, поскольку возможно, что степень изменения входной скорости вращения (этапы S7) и величина изменения крутящего момента мотора (этап S8), которые используются для оценки выбирания зазора, вычислены как избыточные в абсолютном значении.
На этапе S7, следом за оценкой, что время таймера, прошедшее после ND-переключения ≥ временного периода запрета вычисления оценки выбирания зазора, на этапе S6, объединенный контроллер 10 выполняет операцию вычисления для вычисления степени изменения входной скорости вращения, которая является степенью изменения скорости вращения входного вала Input коробки передач, и затем процесс переходит к этапу S8. Степень изменения входной скорости вращения может быть получена посредством дифференцирования входной скорости вращения относительно времени.
На этапе S8, следом за операцией вычисления для степени изменения входной скорости вращения на этапе S7, объединенный контроллер 10 выполняет операцию вычисления для вычисления величины изменения крутящего момента мотора, которая является величиной изменения нагрузки мотор-генератора MG, которая изменяется вместе с управлением скоростью вращения мотора для поддержания входной скорости вращения коробки передач, и затем процесс переходит к этапу S9. Величина изменения крутящего момента мотора определяется не от времени операции переключения с N-диапазона на D-диапазон, а минимальное значение крутящего момента мотора постоянно обновляется и запоминается от момента времени, когда началась оценка начала сцепления. Затем, величина изменения крутящего момента мотора вычисляется посредством вычитания запомненного минимального значения STMG_MIN крутящего момента мотора из полученного в настоящее время крутящего момента мотора (например, в форме значения тока мотора).
На этапе S9, следом за операцией вычисления для величины изменения крутящего момента мотора на этапе S8, объединенный контроллер 10 оценивает, превысило или нет время таймера, прошедшее после ND-переключения, или стало равным минимальному временному периоду управления ходом поршня. Когда ответ - да (время таймера, прошедшее после ND-переключения ≥ минимального временного периода управления ходом поршня), процесс переходит к этапу S10. Когда ответ - нет (время таймера, прошедшее после ND-переключения < минимального временного периода управления ходом поршня), процесс возвращается к этапу S4. Минимальный временной период управления ходом поршня определяется на основе экспериментальных данных о временном периоде от начала управления ходом поршня до окончания управления ходом поршня, которые получаются вместе с переменной входной скоростью вращения коробки передач, температурой масла и т.д. Например, минимальный временной период управления ходом поршня устанавливается в минимальное из экспериментальных значений временного периода к концу управления ходом поршня. Этот таймер (минимальный временной период управления ходом поршня) устанавливается во временной период между следующими временными периодами (1) и (2).
(1) Достаточный временной период для схождения входной скорости вращения в целевую скорость вращения (а именно, скорость вращения во время переключения) посредством управления для поддержания входной скорости вращения постоянной после переключения.
(2) Минимальный временной период до времени сцепления муфты посредством управления ходом поршня.
На этапе S10, следом за оценкой, что время таймера, прошедшее после ND-переключения ≥ минимального временного периода управления ходом поршня, на этапе S9, объединенный контроллер 10 оценивает, больше или нет абсолютное значение для последнего значения степени изменения входной скорости вращения, вычисленной на этапе S7, или равно абсолютному значению порогового значения степени изменения входной скорости вращения. Когда ответ - да (|степень изменения входной скорости вращения| ≥ |порогового значения степени изменения входной скорости вращения|), процесс переходит к этапу S15. Когда ответ - нет (|степень изменения входной скорости вращения| < |порогового значения степени изменения входной скорости вращения|), процесс переходит к этапу S11. Абсолютное значение порогового значения степени изменения входной скорости вращения устанавливается большим, когда возможно оценить вращательные колебания двигателя Eng как большие (например, в условиях высокой скорости вращения холостого хода в холодном состоянии), чем, когда возможно оценить вращательные колебания двигателя Eng как небольшие (например, в условиях нормальной скорости вращения холостого хода после прогрева). В частности, как показано на фиг.7, абсолютное значение порогового значения степени изменения входной скорости вращения устанавливается постепенно возрастающим в отрицательном направлении, когда входная скорость вращения в автоматической коробке AT передач увеличивается.
На этапе S11, следом за решением о том, что |степень изменения входной скорости вращения| < |порогового значения степени изменения входной скорости вращения|, на этапе S10, объединенный контроллер 10 оценивает, больше или нет последнее значение величины изменения крутящего момента мотора, вычисленное на этапе S8, или равно пороговому значению величины изменения крутящего момента мотора. Когда ответ - да (величина изменения крутящего момента мотора ≥ порогового значения величины изменения крутящего момента мотора), процесс переходит к этапу S15. Когда ответ - нет (величина изменения крутящего момента мотора < порогового значения величины изменения крутящего момента мотора), процесс переходит к этапу S12. Пороговое значение величины изменения крутящего момента устанавливается большим, когда возможно оценить вращательные колебания двигателя Eng как большие (например, когда управление скоростью вращения мотора выполняется для поддержания высокой скорости вращения холостого хода в холодном состоянии), чем, когда возможно оценить вращательные колебания двигателя Eng как небольшие (например, когда управление скоростью вращения мотора выполняется для поддержания нормальной скорости вращения холостого хода после прогрева). В частности, как показано на фиг.8, пороговое значение величины изменения крутящего момента мотора устанавливается в постоянное значение прежде, чем входная скорость вращения в автоматической коробке AT передач достигнет заданной скорости Nin1 вращения, и устанавливается так, что пороговое значение величины изменения крутящего момента мотора увеличивается постепенно по мере того, как входная скорость вращения увеличивается после превышения заданной скорости Nin1 вращения.
На этапе S12, следом за оценкой того, что величина изменения крутящего момента мотора < порогового значения величины изменения крутящего момента мотора, на этапе S11, объединенный контроллер 10 оценивает, больше или нет абсолютное значение последнего значения величины изменения входной скорости вращения, вычисленное на этапе S5, или равно абсолютному значению порогового значения величины изменения входной скорости вращения. Когда ответ - да (|величина изменения входной скорости вращения| ≥ |порогового значения величины изменения входной скорости вращения|), процесс переходит к этапу S15. Когда ответ - нет (|величина изменения входной скорости вращения| < |порогового значения величины изменения входной скорости вращения|), процесс переходит к этапу S13. Абсолютное значение порогового значения величины изменения входной скорости вращения задается посредством измерения величины уменьшения входной скорости вращения экспериментальным путем или т.п., при этом входная скорость вращения уменьшается вследствие увеличения нагрузки трансмиссии посредством начала сцепления второго тормоза B2 (а именно, тормоза LOW/B низших передач).
На этапе S13, следом за оценкой того, что |величина изменения входной скорости вращения| < |порогового значения величины изменения входной скорости вращения|, на этапе S12, объединенный контроллер 10 оценивает, меньше или нет абсолютное значение входной скорости вращения в автоматической коробке AT передач (а именно, скорость Nm вращения мотора от датчика 21 скорости вращения мотора) или равно абсолютному значению порогового значения входной скорости вращения. Когда ответ - да (|входная скорость вращения| ≤ |порогового значения входной скорости вращения|, процесс переходит к этапу S15. Когда ответ - нет (|входная скорость вращения| > |порогового значения входной скорости вращения|, процесс переходит к этапу S14. Абсолютное значение порогового значения входной скорости вращения задается посредством определения значения входной скорости вращения экспериментальным путем или т.п., при этом входная скорость вращения уменьшается вследствие увеличения нагрузки трансмиссии посредством начала сцепления второго тормоза B2 (а именно, тормоза LOW/B низших передач).
На этапе S14, следом за оценкой того, что |входная скорость вращения| > |порогового значения входной скорости вращения| на этапе S13, объединенный контроллер 10 оценивает, действительно или нет время таймера, прошедшее после ND-переключения, становится больше или равно максимальному временному периоду управления ходом поршня. Когда ответ - да (время таймера, прошедшее после ND-переключения ≥ максимального временного периода управления ходом поршня), процесс переходит к этапу S15. Когда ответ - нет (время таймера, прошедшее после ND-переключения < максимального временного периода управления ходом поршня), процесс возвращается к этапу S4. Максимальный временной период управления ходом поршня определяется на основе экспериментальных данных о временном периоде от начала управления ходом поршня до окончания управления ходом поршня, которые получаются вместе с переменной входной скоростью вращения коробки передач, температурой масла и т.д. Например, максимальный временной период управления ходом поршня устанавливается в максимальное из экспериментальных значений временного периода в конце управления ходом поршня.
На этапе S15 объединенный контроллер 10 выводит флаг оценки начала сцепления в ответ на оценку того, что на одном из этапов S10-S14, в качестве этапов оценки начала сцепления, условие для оценки начала сцепления удовлетворяется, и процесс переходит к окончанию. Когда второй тормоз B2 (а именно, тормоз LOW/B низших передач) оценивается как начавший сцепляться, объединенный контроллер 10 начинает управление WSC-режима посредством сцепления с возможностью проскальзывания для компенсации дифференциального вращения между двигателем Eng и левым и правым задними колесами RL, RR, в то же время управляя регулированием перегрузочной способности по сцеплению для получения передаваемого крутящего момента согласно требуемому крутящему моменту приведения в движение.
Последующее описание описывает действия устройства управления для гибридного транспортного средства согласно первому варианту осуществления в отдельных разделах "Причина необходимости точной оценки начала сцепления", "Действие при оценке начала сцепления при операции переключения с N-диапазона на D-диапазон", "Действие настройки порогового значения степени изменения входной скорости вращения и порогового значения величины изменения крутящего момента мотора" и "Действие управления WSC-режима на основе оценки начала сцепления в условиях уменьшения скорости вращения холостого хода".
Причина необходимости точной оценки начала сцепления
В случае оценки начала сцепления во время операции переключения с N-диапазона на D-диапазон управление WSC-режима с указанием нулевого крутящего момента начинается в ответ на оценку начала сцепления в качестве триггера. Соответственно, настоящая логика оценки необходима для точной оценки начала сцепления.
В частности, второй тормоз B2 (а именно, тормоз LOW/B низших передач), который начинает сцепляться в ответ на операцию переключения с N-диапазона на D-диапазон, управляется в WSC-режиме, после того, как второй тормоз B2 оценен как начавший сцепляться. В этом управлении WSC-режима требуемый крутящий момент приведения в движение равен нулю, когда транспортное средство неподвижно с включенным тормозом, так что крутящий момент, передаваемый вторым тормозом B2, управляется, чтобы быть очень маленьким. В этих условиях гидравлическое давление должно быть больше или равно гидравлическому давлению, предоставляющему возможность управляемому поршню удерживаться в условиях завершения хода, и быть ниже или равно гидравлическому давлению, предотвращающему значительное падение рабочего ресурса второго тормоза B2 вследствие проскальзывания. А именно, необходимо сохранять состояние готовности с более низким гидравлическим давлением, чем гидравлическое давление, используемое для оценки завершения хода поршня.
Поскольку второй тормоз B2 сцепляется с возможностью проскальзывания согласно требуемому крутящему моменту приведения в движение после оценки начала сцепления, длительный период времени необходим, чтобы выполнить ход поршня, даже после начала управления WSC-режима, если второй тормоз B2 некорректно оценен как начавший сцепляться, хотя второй тормоз B2 еще не начал сцепляться. Когда водитель запрашивает начало движения транспортного средства посредством операции выключения тормоза и нажатия на педаль акселератора, в то время как выполняется ход поршня, перегрузочную способность по крутящему моменту сцепления второго тормоза B2 не удается повысить даже с повышением гидравлического давления, так что может возникать толчок вследствие временного запаздывания или быстрого сцепления до повышения крутящего момента. Это заставляет водителя чувствовать дискомфорт вследствие временной задержки или толчка, поскольку чувствительность водителя к перегрузкам высока в условиях, когда транспортное средство начинает движение из неподвижного состояния.
С другой стороны, если второй тормоз B2 некорректно оценен как начавший сцепляться после фактического начала сцепления, гидравлическое давление стало выше в начале управления WSC-режима, чем предписанное гидравлическое давление, используемое для оценки выполнения хода поршня. Соответственно, даже если гидравлическое давление понижено для состояния готовности после начала управления WSC-режима, гидравлическое давление в состоянии готовности для второго тормоза B2 поддерживается в гидравлическом давлении, вызывающем максимальный крутящий момент. Соответственно, если временной период от времени операции переключения с N в D-диапазон до времени начала движения транспортного средства становится длительным, продолжение сцепления с возможностью проскальзывания второго тормоза B2, в котором пластины второго тормоза B2 прижаты, формирует тепло трения и, таким образом, неблагоприятно влияет на рабочий ресурс и надежность второго тормоза B2. Поскольку скорость вращения левого и правого задних колес RL, RR равна нулю, когда транспортное средство неподвижно с состоянием готовности гидравлического давления, скорость вращения двигателя Eng непосредственно равна дифференциальной скорости вращения второго тормоза B2, которая должна быть компенсирована посредством сцепления с возможностью проскальзывания.
Соответственно, точная оценка начала сцепления (оценка выбирания зазора) необходима для улучшения регулируемости в управлении WSC-режима после оценки начала сцепления.
Действие оценки начала сцепления при операции переключения с N-диапазона на D-диапазон
Действие оценки начала сцепления при операции переключения с N-диапазона на D-диапазон согласно первому варианту осуществления, которая предоставляется с помощью текущей логики оценки, способной точно оценивать начало сцепления, со ссылкой на блок-схему последовательности операций показано на фиг.6.
Когда транспортное средство неподвижно с выбранным N-диапазоном, последовательность операций от этапа S1 через этап S2 до конца многократно выполняется в блок-схеме последовательности операций на фиг.6. А именно, на этапе S2, управление скоростью вращения мотора выполняется с целевой скоростью вращения, установленной в целевую скорость вращения холостого хода (переменную скорость вращения) двигателя Eng. В этом управлении скоростью вращения мотора целевая скорость вращения устанавливается по одному из следующих трех шаблонов.
(a) В холодном состоянии, когда температура охлаждающей жидкости двигателя находится в очень низком диапазоне, например, когда транспортное средство запускается в холодную погоду, целевая скорость вращения устанавливается в высокую скорость вращения холостого хода, которая выше нормальной скорости вращения холостого хода, чтобы содействовать прогреву двигателя Eng.
(b) когда температура охлаждающей жидкости двигателя растет вследствие процесса прогрева двигателя Eng на основе управления высокой скоростью вращения холостого хода, целевая скорость вращения устанавливается постепенно уменьшающейся от высокой скорости вращения холостого хода до нормальной скорости вращения холостого хода.
(c) Когда температура охлаждающей жидкости двигателя выше или равна предварительно определенной температуре после операции прогрева двигателя Eng, целевая скорость вращения устанавливается удерживаемой в нормальной скорости вращения холостого хода.
Впоследствии, когда водитель выполняет операцию переключения с N-диапазона на D-диапазон, процесс переходит от этапа S1 к этапу S3 в блок-схеме последовательности операций на фиг.6. На этапе S3 управление скоростью вращения мотора выполняется, чтобы изменять целевую скорость вращения управления скоростью вращения мотора во время выбора N-диапазона (переменная скорость вращения) на входную скорость вращения коробки передач во время операции переключения с N-диапазона на D-диапазон (фиксированная скорость вращения) и затем удерживать целевую скорость вращения на постоянной входной скорости вращения.
Следом за этапом S3 процесс переходит от этапа S4 через этап S5 к этапу S6 в блок-схеме последовательности операций на фиг.6. На этапе S6 оценивается, действительно или нет время таймера, прошедшее после ND-переключения, превышает или становится равным предварительно определенному временному периоду запрета вычисления оценки выбирания зазора. Пока оценивается, что время таймера, прошедшее после ND-переключения < предварительно определенного временного периода запрета вычисления оценки выбирания зазора, последовательность операций от этапа S4 через этап S5 к этапу S6 повторяется. А именно, на этапе S4, подсчитывается время таймера, прошедшее после ND-переключения, указывающее прошедший временной период от времени операции переключения с N-диапазона на D-диапазон, а на этапе S5 вычисляется величина изменения входной скорости вращения, при этом величина изменения входной скорости вращения является величиной уменьшения скорости вращения с входной скорости вращения коробки передач во время операции переключения с N-диапазона на D-диапазон.
Затем, когда время таймера, прошедшее после ND-переключения, превышает или становится равным временному периоду запрета вычисления оценки выбирания зазора, процесс переходит от этапа S6 через этап S7 и этап S8 к этапу S9. На этапе S9 оценивается, действительно или нет время таймера, прошедшее после ND-переключения ≥ минимального временного периода управления ходом поршня. Пока оценивается, что время таймера, прошедшее после ND-переключения < минимального временного периода управления ходом поршня, последовательность операций от этапа S4 через этап S5, этап S6, этап S7 и этап S8 до этапа S9 повторяется. А именно, на этапе S7, вычисляется степень изменения входной скорости вращения, где степень изменения входной скорости вращения является степенью изменения скорости вращения входного вала Input коробки передач, а на этапе S8 вычисляется величина изменения крутящего момента мотора, где величина изменения крутящего момента мотора является величиной изменения нагрузки мотор-генератора MG.
Впоследствии, когда время таймера, прошедшее после ND-переключения, превышает или становится равным временному периоду запрета вычисления оценки выбирания зазора и, более того, превышает или становится равным минимальному временному периоду управления ходом поршня, начинается операция оценки, состоящая из следующих пяти стадий на и после этапа S10.
(Первое условие оценки начала сцепления на этапе S10) Первое условие оценки начала сцепления является условием того, что абсолютное значение степени изменения входной скорости вращения больше или равно пороговому значению степени изменения входной скорости вращения. Когда на этапе S10 оценивается, что |степень изменения входной скорости вращения| < |порогового значения входной скорости вращения|, процесс переходит к следующему этапу S11. Когда на этапе S10 оценивается, что |степень изменения входной скорости вращения| ≥ |порогового значения изменения входной скорости вращения|), процесс переходит к следующему этапу S15, где выводится флаг оценки начала сцепления.
(Второе условие оценки начала сцепления на этапе S11) Второе условие оценки начала сцепления является условием того, что величина изменения крутящего момента мотора больше или равна пороговому значению величины изменения крутящего момента мотора. Когда на этапе S11 оценивается, что величина изменения крутящего момента мотора < порогового значения величины изменения крутящего момента мотора, процесс переходит к этапу S12. Когда на этапе S11 оценивается, что величина изменения крутящего момента мотора ≥ порогового значения величины изменения крутящего момента мотора, процесс переходит к этапу S15, где выводится флаг оценки начала сцепления.
(Третье условие оценки начала сцепления на этапе S12) Третье условие оценки начала сцепления является условием того, что абсолютное значение величины изменения входной скорости вращения больше или равно абсолютному значению порогового значения величины изменения входной скорости вращения. Когда на этапе S12 оценивается, что |величина изменения входной скорости вращения| < |порогового значения величины изменения входной скорости вращения|, процесс переходит к этапу S13. Когда на этапе S12 оценивается, что |величина изменения входной скорости вращения| ≥ |порогового значения величины изменения входной скорости вращения|, процесс переходит к этапу S15, где выводится флаг оценки начала сцепления.
(Четвертое условие оценки начала сцепления на этапе S13) Четвертое условие оценки начала сцепления является условием того, что абсолютное значение входной скорости вращения ниже или равно абсолютному значению порогового значения входной скорости вращения, другими словами, условием того, что величина уменьшения входной скорости вращения относительно целевой скорости вращения в качестве "параметра, который изменяется вместе с вращательными колебаниями источника приведения в движение", больше или равна пороговому значению. Когда на этапе S13 оценивается, что |входная скорость вращения| > |порогового значения входной скорости вращения|, процесс переходит к этапу S14. Когда на этапе S13 оценивается, что |входная скорость вращения| ≤ |порогового значения входной скорости вращения|, процесс переходит к этапу S15, где выводится флаг оценки начала сцепления.
(Пятое условие оценки начала сцепления на этапе S14) Пятое условие оценки начала сцепления является условием того, что время таймера, прошедшее после ND-переключения, стало больше или равно максимальному временному периоду управления ходом поршня. Когда на этапе S14 оценивается, что время таймера, прошедшее после ND-переключения < максимального временного периода управления ходом поршня, процесс возвращается к этапу S4. Когда на этапе S14 оценивается, что время таймера, прошедшее после ND-переключения ≥ максимального временного периода управления ходом поршня, процесс переходит к этапу S15, где выводится флаг оценки начала сцепления.
Таким образом, действие оценки начала сцепления при операции переключения с N-диапазона на D-диапазон согласно первому варианту осуществления применяет логику оценки, имеющую следующие признаки (1) и (2).
(1) В качестве решения для предотвращения некорректной оценки для случая, когда выполняется операция переключения в D-диапазон, когда целевая скорость вращения холостого хода в N-диапазоне уменьшается постепенно с высокой скорости вращения холостого хода до нормальной скорости вращения холостого хода, начало оценки запрещается до тех пор, пока предварительно определенный временной период не пройдет после операции переключения с N-диапазона на D-диапазон. А именно, момент начала оценки, который был во время операции переключения с N-диапазона на D-диапазон, задерживается от времени операции переключения с N-диапазона на D-диапазон.
(2) В качестве решения для предотвращения некорректной оценки для случая, когда операция переключения в D-диапазон выполняется в условиях высокого холостого хода на основе высокой скорости вращения холостого хода, абсолютное значение для порогового значения степени изменения входной скорости вращения и порогового значения величины изменения крутящего момента мотора устанавливаются по-разному согласно входной скорости вращения (а именно, скорости вращения холостого хода). А именно, пороговые значения оценки, которые были установлены в постоянные значения, устанавливаются в переменные значения, которые являются переменными согласно входной скорости вращения (а именно, скорости вращения холостого хода).
Действие установки порогового значения степени изменения входной скорости вращения и порогового значения величины изменения крутящего момента мотора
В условиях высокого холостого хода вращательные колебания двигателя Eng являются большими, так что вероятность некорректной оценки относительно начала сцепления высока. В таких условиях высокого холостого хода также необходимо предотвращать некорректную оценку относительно начала сцепления. Последующее описание описывает действие установки порогового значения степени изменения входной скорости вращения и порогового значения величины изменения крутящего момента мотора со ссылкой на фиг. 9-11.
Что касается степени изменения входной скорости вращения, которая является параметром для оценки начала сцепления, абсолютное значение порогового значения степени изменения входной скорости вращения устанавливается постепенно возрастающим в отрицательном направлении по мере того, как входная скорость вращения в автоматической коробке AT передач увеличивается, на этапе S10 на фиг. 6 (см. фиг.7)
А именно, степень изменения входной скорости вращения представляет степень изменения входной скорости вращения (а именно, наклон изменения входной скорости вращения) вследствие колебания скорости вращения холостого хода (в дальнейшем называемой колебанием холостого хода). Когда эксперимент относительно оценки начала сцепления был выполнен по отношению к входной скорости вращения, были получены экспериментальные данные, которые показывают характеристики изменения, что степень изменения входной скорости вращения вследствие колебания холостого хода увеличивается, когда входная скорость вращения в автоматической коробке AT передач (а именно, скорость вращения холостого хода) увеличивается, как показано на фиг.9. А именно, как показано сплошной линией на фиг.9, необходимо предотвращать выполнение оценки начала сцепления, даже когда степень изменения входной скорости вращения вследствие колебания холостого хода максимизируется.
Таким образом, когда входная скорость вращения увеличивается, степень изменения входной скорости вращения, когда элемент фрикционного сцепления начинает сцепляться (отрицательное значение), уменьшается (увеличивается в абсолютном значении). Соответственно, когда этот параметр (степень изменения входной скорости вращения) используется в качестве информации для оценки начала сцепления, абсолютное значение порогового значения степени изменения входной скорости вращения устанавливается большим в условиях высокой скорости вращения холостого хода и больших колебаний холостого хода, когда двигатель находится в холодном состоянии, чем в условиях нормальной скорости вращения холостого хода и небольших колебаний холостого хода, после того, как двигатель прогрелся. Это служит для предотвращения некорректной оценки относительно начала сцепления в условиях высокого холостого хода, когда входная скорость вращения является высокой, и служит для точной оценки начала сцепления второго тормоза B2 на основе степени изменения входной скорости вращения в качестве параметра.
Что касается величины изменения крутящего момента мотора, которая является параметром для оценки начала сцепления, пороговое значение величины изменения крутящего момента мотора устанавливается постоянным до тех пор, пока входная скорость вращения для автоматической коробки AT передач не достигнет заданной скорости Nin1 вращения, и устанавливается, после превышения заданной скорости Nin1 вращения, постепенно увеличивающейся, когда входная скорость вращения увеличивается (см. фиг.8).
А именно, когда эксперимент для оценки начала сцепления был выполнен относительно входной скорости вращения, были получены экспериментальные данные, которые показывают характеристики изменения, что величина изменения крутящего момента мотора вследствие колебания холостого хода увеличивается, когда входная скорость вращения для автоматической коробки AT передач (а именно, скорость вращения холостого хода) увеличивается, как показано на фиг.10. А именно, как показано сплошной линией на фиг.10, необходимо предотвращать выполнение оценки начала сцепления, даже когда степень изменения входной скорости вращения вследствие колебания холостого хода максимизируется. Соответственно, пороговое значение величины изменения крутящего момента мотора, показанное на фиг.8, определяется посредством комбинации характеристики максимума величины крутящего момента мотора вследствие колебания холостого хода и постоянного порогового значения величины изменения крутящего момента мотора согласно сравнительному примеру и добавления величины ошибки.
Таким образом, когда колебания холостого хода являются большими, когда управление скоростью вращения мотора выполняется, чтобы удерживать целевую скорость вращения постоянной, крутящий момент мотора становится большим, чтобы удерживать скорость вращения в постоянной целевой скорости вращения с пресечением колебаний холостого хода, так что величина изменения крутящего момента мотора увеличивается пропорционально величине колебаний холостого хода. Соответственно, когда этот параметр (величина изменения крутящего момента мотора) используется в качестве информации для оценки начала сцепления, пороговое значение величины изменения крутящего момента мотора устанавливается большим в условиях высокой скорости вращения холостого хода и больших колебаний холостого хода, когда двигатель находится в холодном состоянии, чем в условиях нормальной скорости вращения холостого хода и небольших колебаний холостого хода, после того, как двигатель прогрелся. Это служит для предотвращения некорректной оценки относительно начала сцепления в условиях высокого холостого хода, когда входная скорость вращения является высокой, и служит для точной оценки начала сцепления второго тормоза B2 на основе величины изменения крутящего момента мотора в качестве параметра.
Действие управления WSC-режима на основе оценки начала сцепления в условиях уменьшения скорости вращения холостого хода
Оценка начала сцепления и начало WSC-режима находятся в тесной взаимосвязи друг с другом, поскольку управление WSC-режима начинается после оценки начала сцепления, когда операция переключения с N-диапазона на D-диапазон выполняется в условиях того, что скорость вращения холостого хода уменьшается. Последующее описание описывает действие управления WSC-режима на основе оценки начала сцепления в условиях уменьшения скорости вращения холостого хода, которое отражает соотношение, описанное выше, со ссылкой на фиг.12 и 13.
Во-первых, предполагается сравнительный пример, в котором в ситуации, когда операция переключения выполняется с N-диапазона на D-диапазон (или R-диапазон), в то время как скорость вращения холостого хода уменьшается с высокой скорости вращения холостого хода до нормальной скорости вращения холостого хода, момент начала оценки начала сцепления второго тормоза B2 устанавливается во время, когда выполняется операция переключения с N-диапазона на D-диапазон.
Например, в условиях высокой скорости вращения холостого хода, когда транспортное средство неподвижно с выбранным N-диапазоном и двигателем в холодном состоянии, целевая скорость вращения холостого хода начинает уменьшаться вследствие процесса прогрева в момент t0 времени на фиг.12, и затем скорость вращения двигателя продолжает уменьшаться к нормальной скорости вращения холостого хода. В это время нагрузка мотор-генератора MG под управлением скоростью вращения мотора уменьшается, чтобы способствовать уменьшению скорости вращения двигателя. Когда управление скоростью вращения мотора переключается на управление для поддержания постоянной целевой скорости вращения в ответ на операцию переключения с N-диапазона на D-диапазон в момент t1 времени в этих условиях, нагрузка мотор-генератора MG быстро увеличивается из пониженного состояния для пресечения уменьшения скорости вращения двигателя. Соответственно, в момент t2 времени непосредственно после операции переключения с N-диапазона на D-диапазон, величина изменения крутящего момента мотора становится больше или равна пороговому значению, тем самым вызывая некорректную оценку (некорректную оценку завершения выбирания зазора), которая получается в результате начала сцепления второй муфты.
После момента t2 времени управление WSC-режима начинается на основе сцепления с возможностью проскальзывания, которое компенсирует дифференциальное вращение между двигателем Eng и левым и правым задними колесами RL, RR, в то же время управляя перегрузочной способностью по сцеплению для получения передаваемого крутящего момента согласно требуемому крутящему моменту приведения в движение. А именно, после момента t2 времени, когда транспортное средство неподвижно с включенным тормозом, требуемый крутящий момент приведения в движение равен нулю, так что командное значение управляется, чтобы уменьшаться постепенно для того, чтобы вынуждать крутящий момент, передаваемый посредством второго тормоза B2, быть очень маленьким. В этих условиях происходит временная задержка или толчок, который доставляет водителю дискомфорт, поскольку начало сцепления второго тормоза B2 некорректно оценено, хотя сцепление второго тормоза B2 не начиналось. А именно, когда водитель запрашивает начало движения транспортного средства с помощью операции выключения тормоза и включения акселератора, перегрузочной способности по крутящему моменту сцепления второго тормоза B2 не удается расти в ответ на рост гидравлического давления, тем самым вызывая толчок вследствие временной задержки до увеличения крутящего момента или вследствие быстрого сцепления.
Последующее описание описывает поведение первого варианта осуществления, когда выполняется операция переключения с N-диапазона на D-диапазон (или R-диапазон), в то время как скорость вращения холостого хода уменьшается с высокой скорости вращения холостого хода до нормальной скорости вращения холостого хода, в отличие от сравнительного примера. В момент t1 времени, когда выполняется операция переключения с N-диапазона на D-диапазон, как показано посредством характеристики командного давления на фиг.13, командное давление устанавливается максимизированным посредством резкого повышения давления во время периода от момента t1 времени до момента t2 времени. Затем, во время периода от момента t2 времени до момента t3 времени, командное давление устанавливается немного более низким посредством предварительной накачки, чем максимальное командное давление, и затем уменьшается в момент t3 времени, и затем устанавливается постепенно возрастающим от пониженного командного давления.
Однако, в течение периода от момента t1 времени до момента t3 времени, минимальный временной период выполнения выбирания зазора (а именно, временной период, когда крутящий момент и скорость вращения колеблются вследствие возмущения, или более длительный один из временного периода запрета вычисления оценки выбирания зазора на этапе S6 и минимального временного периода управления ходом поршня на этапе S9) не прошел до момента t4 времени, так что оценка начала сцепления для второго тормоза B2 не начинается. А именно, оценка относительно начала сцепления второго тормоза B2 начинается после ожидания истечения временного периода запрета оценки начала сцепления, при этом временной период запрета оценки начала сцепления определяется как временной период до момента t4 времени, когда становится возможным оценивать затухание вращательных колебаний двигателя Eng и мотор-генератора MG, вызванных внешним фактором (колебаниями скорости вращения холостого хода), отличным от начала сцепления второго тормоза B2. Это служит для предотвращения некорректной оценки начала сцепления второго тормоза B2, даже когда величина изменения крутящего момента мотора становится большой от момента t1 времени до момента t4 времени, в отличие от сравнительного примера.
После момента t4 времени, когда характеристика крутящего момента мотора становится устойчивой вследствие затухания колебаний двигателя Eng и мотор-генератора MG, начинается оценка начала сцепления второго тормоза B2. А именно, в момент t5 времени, когда величина изменения крутящего момента мотора становится больше или равна пороговому значению величины изменения крутящего момента мотора, оценивается, что сцепление второго тормоза B2 началось (выбирание зазора второго тормоза B2 оценивается как выполненное). Оценка начала сцепления второго тормоза B2 начинается после ожидания истечения временного периода запрета оценки начала сцепления, при этом временной период от момента t1 времени до момента t4 времени устанавливается в качестве временного периода запрета оценки начала сцепления, как описано выше, так что начало сцепления второго тормоза B2 оценивается точно.
После момента t5 времени управление WSC-режима начинается на основе сцепления с возможностью проскальзывания, которое компенсирует дифференциальное вращение между двигателем Eng и левым и правым задними колесами RL, RR, в то же время управляя перегрузочной способностью по сцеплению для получения передаваемого крутящего момента согласно требуемому крутящему моменту приведения в движение. А именно, после момента t5 времени, когда транспортное средство неподвижно с включенным тормозом, требуемый крутящий момент приведения в движение равен нулю, так что командное значение управляется, чтобы уменьшаться постепенно до момента t6 времени для того, чтобы вынуждать крутящий момент, передаваемый через второй тормоз B2, быть очень маленьким. В этих условиях посредством точной оценки начала сцепления второго тормоза B2 гидравлическое давление управляется до гидравлического давления в режиме готовности, которое больше или равно гидравлическому давлению, предоставляющему возможность удержания управляемого поршня второго тормоза B2 в условиях завершения хода, и ниже или равно гидравлическому давлению, предотвращающему значительное падение рабочего ресурса второго тормоза B2 вследствие проскальзывания.
Это предотвращает то, что временная задержка или толчок доставляют водителю дискомфорт как в случае, когда начало сцепления второго тормоза B2 оценивается некорректно, хотя сцепление второго тормоза B2 не началось. А именно, после момента t6 времени, например, если командное давление повысилось согласно росту требуемого крутящего момента приведения в движение, когда водитель выполняет операцию включения акселератора после операции выключения тормоза, чтобы запрашивать начало движения транспортного средства, перегрузочная способность по крутящему моменту сцепления второго тормоза B2 растет с быстрым откликом, тем самым предотвращая возникновение толчка вследствие временной задержки до повышения крутящего момента или вследствие быстрого сцепления.
С другой стороны, предотвращается неблагоприятное влияние на рабочий ресурс и надежность второго тормоза B2 как в случае, когда начало сцепления второго тормоза B2 оценено некорректно, хотя сцепление второго тормоза B2 уже началось. А именно, после момента t6 времени, например, когда водитель сохраняет состояние включенного тормоза, состояние сцепления с возможностью проскальзывания продолжается за счет гидравлического давления режима готовности, которое не вызывает сцепления пластин второго тормоза B2, когда подавляется возникновение теплоты трения.
Соответственно, во время операции переключения с N-диапазона на D-диапазон в условиях, когда скорость вращения холостого хода уменьшается с высокой скорости вращения холостого хода, точная оценка начала сцепления второго тормоза B2 (а именно, оценка относительно выбирания зазора) служит для улучшения регулируемости при управлении WSC-режима после оценки начала сцепления.
Последующее описание описывает результаты, полученные посредством устройства управления для FR-гибридного транспортного средства согласно первому варианту осуществления.
(1) Устройство управления гибридного транспортного средства включает в себя: источник приведения в движение, включающий в себя двигатель Eng и мотор (мотор-генератор MG); элемент фрикционного сцепления (второй тормоз B2), предусмотренный на пути передачи движущей силы от источника приведения в движение (двигателя Eng) к ведущему колесу (левому и правому задним колесам RL, RR), при этом элемент фрикционного сцепления сцепляется, когда выбирается диапазон приведения в движение (D-диапазон или т.п.); средство управления поддержанием входной скорости вращения (этап S3 на фиг.6), которое выполняет, посредством управления скоростью вращения мотора (мотор-генератора MG), управление для поддержания входной скорости вращения элемента фрикционного сцепления (второго тормоза B2) на целевой скорости вращения, которая равна входной скорости вращения в начале управления сцеплением элемента фрикционного сцепления; и средство оценки начала сцепления (фиг.6), которое оценивает в ответ на условие то, что элемент фрикционного сцепления (второй тормоз B2) начал сцепляться, при этом условие является условием того, что параметр (степень изменения входной скорости вращения, величина изменения крутящего момента мотора и т.д.) превысил или стал равным предварительно определенному пороговому значению при нахождении в начальном диапазоне управления сцеплением элемента фрикционного сцепления (второго тормоза B2), при этом параметр изменяется вместе с вращательными колебаниями источника приведения в движение (двигателя Eng, мотор-генератора MG); при этом средство оценки начала сцепления (фиг.6) начинает оценку после ожидания условия того, что становится возможным оценивать затухание вращательных колебаний источника приведения в движение (двигателя Eng, мотор-генератора MG), вызванных внешним фактором, отличным от начала сцепления элемента фрикционного сцепления (второго тормоза B2) после времени начала управления началом сцепления элемента фрикционного сцепления (второй тормоз B2) (да на этапе S9). Это служит для предотвращения некорректной оценки начала сцепления элемента фрикционного сцепления (второго тормоза B2), когда источник приведения в движение (двигатель Eng, мотор-генератор MG) вращательно колеблется вследствие внешнего фактора, отличного от начала сцепления элемента фрикционного сцепления (второго тормоза B2).
(2) Средство оценки начала сцепления (фиг.6) применяет в качестве параметра величину изменения крутящего момента мотора, которая является величиной изменения нагрузки мотора (мотор-генератора MG), которая изменяется согласно управлению поддержанием входной скорости вращения (этап S11). Это служит для предотвращения некорректной оценки относительно начала сцепления, когда операция переключения с N-диапазона на D-диапазон выполняется, пока скорость вращения холостого хода уменьшается с высокой скорости вращения холостого хода и служит для точной оценки начала сцепления элемента фрикционного сцепления (второго тормоза B2) на основе величины изменения крутящего момента мотора в качестве параметра, в дополнение к результату (1).
(3) Средство оценки начала сцепления (фиг.6) применяет в качестве параметра степень изменения входной скорости вращения, которая является степенью изменения скорости вращения входного вала элемента фрикционного сцепления (второго тормоза B2), при этом степень изменения входной скорости вращения изменяется вместе с вращательным колебанием источника приведения в движение (двигателя Eng, мотор-генератора MG) (этап S10). Это служит для предотвращения некорректной оценки относительно начала сцепления, когда выполняется операция переключения с N-диапазона на D-диапазон, пока скорость вращения холостого хода уменьшается с высокой скорости вращения холостого хода, и служит для точной оценки начала сцепления элемента фрикционного сцепления (второго тормоза B2) на основе степени изменения входной скорости вращения в качестве параметра, в дополнение к результату (1).
(4) Средство оценки начала сцепления (фиг.6) применяет в качестве параметра обе из величины изменения крутящего момента мотора, которая является величиной изменения нагрузки мотора (мотор-генератора MG), которая изменяется согласно управлению поддержанием входной скорости вращения, и степени изменения входной скорости вращения, которая является степенью изменения скорости вращения входного вала элемента фрикционного сцепления (второго тормоза B2), при этом степень изменения входной скорости вращения изменяется вместе с вращательными колебаниями источника приведения в движение (двигателя Eng, мотор-генератора MG) (этап S10, этап S11). Это служит для предотвращения некорректной оценки относительно начала сцепления, когда выполняется операция переключения с N-диапазона на D-диапазон, пока скорость вращения холостого хода уменьшается с высокой скорости вращения холостого хода, и служит для более точной оценки начала сцепления элемента фрикционного сцепления (второго тормоза B2) на основе обеих из величины изменения крутящего момента мотора и степени изменения входной скорости вращения в качестве параметра, в дополнение к результату (1).
(5) Средство оценки начала сцепления (фиг.6) устанавливает абсолютное значение предварительно определенного порогового значения большим, когда возможно оценить, что вращательные колебания источника приведения в движение (двигателя Eng, мотор-генератора MG) являются большими, чем когда возможно оценить, что вращательные колебания источника приведения в движение являются небольшими (этап S10, этап S11). Это служит для предотвращения некорректной оценки относительно начала сцепления, когда операция переключения с N-диапазона на D-диапазон выполняется в условиях высокой скорости вращения холостого хода, и служит для точной оценки начала сцепления элемента фрикционного сцепления (второго тормоза B2), в дополнение к результатам (1)-(4).
(6) Элемент фрикционного сцепления (второй тормоз B2) является элементом начала движения, при этом управление сцеплением элемента фрикционного сцепления (второго тормоза B2) начинается в ответ на операцию переключения автоматической коробки передач с диапазона без приведения в движение (N-диапазона) в диапазон приведения в движение (D-диапазон); и устройство управления транспортного средства включает в себя средство управления сцеплением с возможностью проскальзывания (средство управления WSC-режима), которое начинает управление сцеплением с возможностью проскальзывания для компенсации дифференциального вращения между источником приведения в движение (двигатель Eng, мотор-генератор MG) и ведущим колесом (левое и правое задние колеса RL, RR) с выполнением управления перегрузочной способностью по сцеплению для получения передаваемого крутящего момента согласно требуемому крутящему моменту приведения в движение в ответ на оценку средством оценки начала сцепления (фиг.6) того, что элемент фрикционного сцепления (второй тормоз B2) начал сцепляться. Это служит для улучшения регулируемости при управлении WSC-режима после оценки начала сцепления посредством точной оценки относительно начала сцепления элемента фрикционного сцепления (второго тормоза B2), когда выполняется операция переключения с N-диапазона на D-диапазон, в дополнение к результатам (1)-(5).
Хотя устройство управления гибридного транспортного средства согласно настоящему изобретению описано со ссылкой на первый вариант осуществления, конкретная конфигурация не ограничивается первым вариантом осуществления, а может быть применена с модификацией конструкции или дополнением конструкции, пока она не выходит за пределы предмета изучения настоящего изобретения, определенные формулой изобретения.
В первом варианте осуществления показан пример, в котором текущее управление применяется независимо от того, действительно или нет, пока изменяется скорость вращения холостого хода, выполняется операция переключения передачи. Однако момент оценки выбирания зазора может быть сконфигурирован, чтобы быть задержанным, только когда операция переключения передачи выполняется, пока скорость вращения холостого хода изменяется.
В первом варианте осуществления условие затухания вращательных колебаний источника приведения в движение идентифицируется посредством таймера, указывающего истечение предварительно определенного временного периода до условия того, что возможно оценивать затухание вращательных колебаний источника приведения в движение. Однако оценка затухания вращательных колебаний источника приведения в движение может быть основана на условии, когда разница между целевой скоростью вращения и фактической скоростью вращения входного вала сходится в предварительно определенном диапазоне, или условии, когда степень изменения фактической входной скорости вращения изменяется с отрицательной стороны в положительную сторону, или условии, когда степень изменения крутящего момента мотора изменяется с отрицательной стороны в положительную сторону.
В первом варианте осуществления условие, когда возможно оценить вращательные колебания источника приведения в движение как большие, реализовано посредством примера условия того, что скорость вращения входного вала коробки передач является высокой. Однако условие, когда возможно оценить вращательные колебания источника приведения в движение как большие, может быть реализовано посредством примера условия того, что температура охлаждающей жидкости двигателя является низкой, при этом абсолютное значение порогового значения устанавливается возрастающим, когда температура охлаждающей жидкости двигателя понижается.
В первом варианте осуществления показан пример управления при операции переключения с N-диапазона на D-диапазон. Однако изобретение применимо к операции переключения с N-диапазона на R-диапазон и операции быстрого переключения во время операции переключения с D-диапазона на R-диапазон или операции переключения с R-диапазона на D-диапазон. Изобретение не ограничено условием операции переключения диапазона, а может быть применено к системе, в которой оценивается выбирание зазора элемента фрикционного сцепления, при этом элемент фрикционного сцепления сцепляется во время переключения передач или т.п.
В первом варианте осуществления, что касается степени изменения входной скорости вращения и величины изменения крутящего момента мотора, показан пример, в котором абсолютное значение порогового значения степени изменения входной скорости вращения и абсолютное значение порогового значения величины изменения крутящего момента мотора устанавливаются возрастающими, когда входная скорость вращения увеличивается. Однако абсолютное значение только одного из порогового значения степени изменения входной скорости вращения и порогового значения величины изменения крутящего момента мотора может быть установлено возрастающим, когда входная скорость вращения увеличивается. Более того, также что касается пороговых значений величины изменения входной скорости вращения и входной скорости вращения, абсолютное значение порогового значения может быть установлено возрастающим, когда входная скорость вращения увеличивается.
В первом варианте осуществления показан пример, в котором устройство управления гибридного транспортного средства по настоящему изобретению применено к FR-гибридному транспортному средству. Однако устройство управления гибридного транспортного средства по настоящему изобретению может быть применено к FF-гибридному транспортному средству или 4WD-гибридному транспортному средству. В общих словах, оно применимо к любому транспортному средству, в котором источник приведения в движение включает в себя двигатель и мотор, и включает в себя элемент фрикционного сцепления на пути передачи движущей силы.
Последующее описание описывает второй вариант осуществления настоящего изобретения. Описание, общее с первым вариантом осуществления, описанным выше, опущено, и, главным образом, описывается часть, отличная от первого варианта осуществления. В гибридном транспортном средстве второго варианта осуществления вспомогательный маслонасос S-O/P удален из конфигурации первого варианта осуществления, показанной на фиг.1, для того, чтобы упрощать конфигурацию посредством уменьшения числа частей. Поскольку конфигурация не включает в себя вспомогательный маслонасос S-O/P, главный маслонасос M-O/P вращается за счет управления скоростью вращения мотор-генератора MG, чтобы обеспечивать подачу гидравлического давления к автоматической коробке AT передач в условиях того, что первая муфта CL1 (второй элемент фрикционного сцепления) расцеплена (например, не находится в состоянии операции прогрева), при этом первая муфта CL1 предусмотрена на пути передачи мощности между двигателем Eng и мотор-генератором MG. С другой стороны, также в случае конфигурации без вспомогательного маслонасоса S-O/P, когда SOC аккумулятора 4 находится на низком уровне в условиях того, что транспортное средство неподвижно, выбирается режим выработки электрической энергии, в котором первая муфта CL1 сцеплена, и выработка электрической энергии выполняется с помощью движущей силы двигателя Eng.
В качестве управления скоростью вращения холостого хода для поддержания входной скорости вращения коробки передач на предварительно определенной целевой скорости вращения холостого хода в режиме работы на холостом ходу, режим работы мотора на холостом ходу выполняется посредством управления скоростью вращения мотор-генератора MG, когда первая муфта CL1 расцеплена, тогда как режим работы двигателя на холостом ходу выполняется посредством управления скоростью вращения двигателя Eng (или мотор-генератора MG), когда первая муфта CL1 сцеплена. Поскольку регулируемость мотор-генератора MG лучше, чем регулируемость двигателя Eng, вращательные колебания меньше в условиях работы мотора на холостом ходу, чем в условиях работы двигателя на холостом ходу. А именно, когда первая муфта CL1 сцеплена, входная мощность от двигателя Eng ведет себя как возмущение по отношению к вращательным колебаниям, так что вращательные колебания становятся больше, чем, когда первая муфта CL1 расцеплена.
Соответственно, во втором варианте осуществления, предварительно определенный временной период задается согласно состояниям сцепления первой муфты CL1, при этом предварительно определенный временной период является временным периодом от времени начала управления сцеплением второго тормоза B2 в качестве элемента фрикционного сцепления до времени, когда становится возможным оценивать затухание вращательных колебаний источника приведения в движение вследствие внешнего фактора, отличного от начала сцепления второго тормоза B2. Этот предварительно определенный временной период соответствует минимальному временному периоду завершения выбирания зазора на фиг.13, а именно, большему из временного периода запрета вычисления оценки выбирания зазора на этапе S6 и минимального временного периода управления ходом поршня на этапе S9. В частности, во втором варианте осуществления, в условиях работы двигателя на холостом ходу, а именно, когда первая муфта CL1 сцеплена, временной период запрета вычисления оценки выбирания зазора на этапе S6 (или минимальный временной период управления ходом поршня на этапе S9) устанавливается более длительным, и, таким образом, минимальный временной период завершения выбирания зазора на фиг.13 устанавливается более длительным на основе оценки, что вращательные колебания являются большими, чем в условиях работы мотора на холостом ходу, а именно, когда первая муфта CL1 расцеплена.
Фиг.14 представляет собой блок-схему последовательности операций, показывающая последовательность операций настройки временного периода запрета вычисления оценки выбирания зазора (минимальный временной период выполнения выбирания зазора на фиг.13) согласно второму варианту осуществления. На этапе S21 оценивается, сцеплена или нет первая муфта CL1. Когда первая муфта CL1 сцеплена, в условиях работы двигателя на холостом ходу, процесс переходит к этапу S22, где временной период запрета вычисления оценки выбирания зазора устанавливается более длительным, чем когда первая муфта CL1 расцеплена. В частности, на этапе S22, временной период запрета вычисления оценки выбирания зазора (минимальный временной период выполнения выбирания зазора) устанавливается в значение, которое найдено посредством таблицы для условия того, что первая муфта CL1 сцеплена, что показано сплошной линией на фиг.15A. С другой стороны, когда первая муфта CL1 расцеплена, а именно, в условиях работы мотора на холостом ходу, процесс переходит от этапа S21 к этапу S23, где временной период запрета вычисления оценки выбирания зазора устанавливается более коротким, чем когда первая муфта CL1 сцеплена. В частности, на этапе S23, временной период запрета вычисления оценки выбирания зазора (минимальный временной период выполнения выбирания зазора) устанавливается в значение, которое найдено посредством таблицы для условия того, что первая муфта CL1 расцеплена, что показано пунктирной линией на фиг.15A.
Таким образом, во втором варианте осуществления, когда первая муфта CL1 сцеплена, так что вращательные колебания являются большими вследствие возмущений со стороны двигателя, таких как колебание крутящего момента двигателя, инерция, трение и т.д., установка длительного минимального временного периода выполнения выбирания зазора служит для пресечения или предотвращения некорректной оценки относительно начала сцепления элемента фрикционного сцепления (второго тормоза B2) вследствие возмущений, а когда первая муфта CL1 расцеплена, так что вращательные колебания являются небольшими, установка короткого минимального временного периода выполнения выбирания зазора служит для быстрого выполнения оценки начала сцепления.
Более того, во втором варианте осуществления, минимальный временной период выполнения выбирания зазора устанавливается в зависимости от температуры охлаждающей жидкости двигателя или температуры масла в двигателе. В частности, как показано на фиг.15B, когда первая муфта CL1 сцеплена, временной период запрета вычисления оценки выбирания зазора является более длительным, когда температура охлаждающей жидкости двигателя или температура масла в двигателе является низкой, чем когда температура охлаждающей жидкости двигателя или температура масла в двигателе является высокой, а именно, минимальный временной период выполнения выбирания зазора устанавливается возрастающим, когда температура охлаждающей жидкости двигателя или температура масла в двигателе понижается.
Когда температура охлаждающей жидкости двигателя или температура масла в двигателе является низкой, колебания трения и крутящего момента двигателя являются большими, так что регулируемость при управлении вращением посредством мотор-генератора MG ухудшается. Однако, во втором варианте осуществления, признак того, что минимальный временной период выполнения выбирания зазора устанавливается длительным, когда температура охлаждающей жидкости двигателя или температура масла в двигателе является низкой, служит для пресечения или предотвращения некорректной оценки относительно начала сцепления вследствие ухудшения регулируемости при управлении вращением.
Более того, во втором варианте осуществления, как показано на фиг.15C, минимальный временной период выполнения выбирания зазора устанавливается в зависимости от температуры рабочей жидкости для управления автоматической коробкой AT передач. В частности, когда температура охлаждающей жидкости для управления автоматической коробкой AT передач является низкой, минимальный временной период выполнения выбирания зазора устанавливается более длительным, чем когда температура охлаждающей жидкости для управления автоматической коробкой AT передач является высокой, а именно, минимальный временной период выполнения выбирания зазора устанавливается возрастающим, когда температура понижается. Когда температура рабочей жидкости для управления автоматической коробкой AT передач является низкой, трение автоматической коробки AT передач является большим, так что регулируемость при управлении вращением посредством мотор-генератора MG ухудшается. Однако признак того, что минимальный временной период выполнения выбирания зазора устанавливается длительным, когда температура рабочей жидкости для управления автоматической коробкой AT передач является низкой, служит для пресечения или предотвращения некорректной оценки относительно начала сцепления вследствие ухудшения регулируемости при управлении вращением.
Более того, во втором варианте осуществления, хотя не показано на чертежах, минимальный временной период выполнения выбирания зазора устанавливается в зависимости от степени изменения целевой скорости вращения непосредственно перед выбором диапазона приведения в движение. В частности, когда эта степень изменения целевой скорости вращения является большой, минимальный временной период выполнения выбирания зазора устанавливается более длительным, чем когда эта степень изменения целевой скорости вращения является небольшой.
Хотя колебание крутящего момента мотора является большим, когда степень изменения целевой скорости вращения является большой, признак того, что минимальный временной период выполнения выбирания зазора устанавливается длительным в этих условиях, служит для пресечения или предотвращения некорректной оценки относительно начала сцепления вследствие колебания крутящего момента мотора.
Автоматическая коробка передач не ограничена ступенчатыми коробками передач, как в первом варианте осуществления и втором варианте осуществления, описанных выше, а может быть бесступенчатой трансмиссией (CVT).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2557103C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИИ | 2013 |
|
RU2643901C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2508487C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2654250C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РЫВКОВ, СВЯЗАННЫХ С ПЕРЕКЛЮЧЕНИЕМ РЕЖИМОВ В АВТОМОБИЛЕ | 2005 |
|
RU2338099C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527653C1 |
| АВТОМОБИЛЬ | 1998 |
|
RU2202479C2 |
| УСТРОЙСТВО СЦЕПЛЕНИЯ ЗАЦЕПЛЯЮЩЕГО ТИПА | 2016 |
|
RU2628543C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2659151C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2555394C1 |
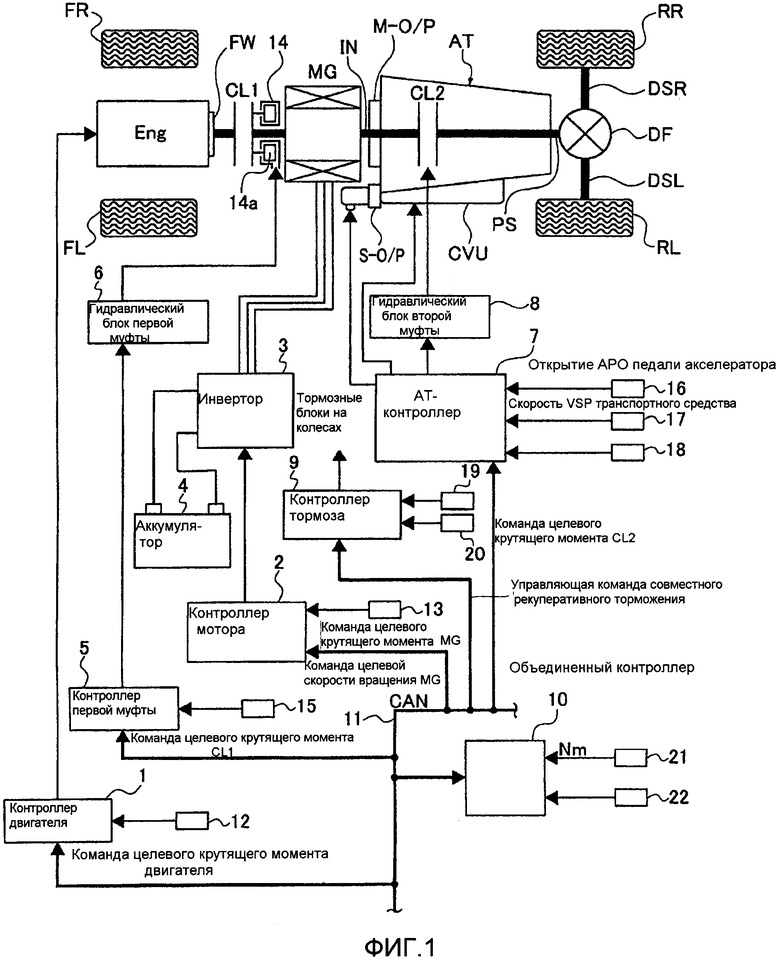
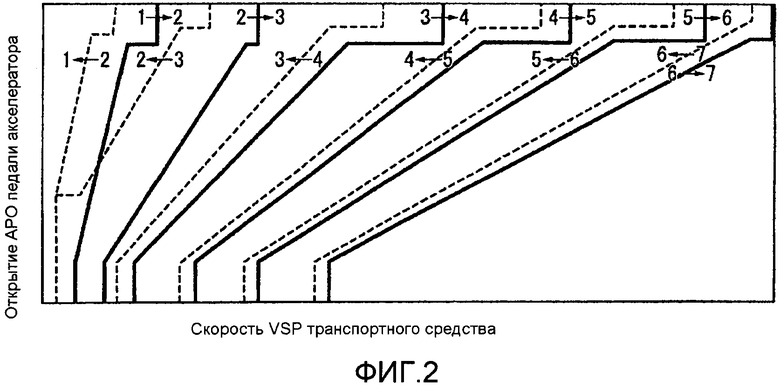
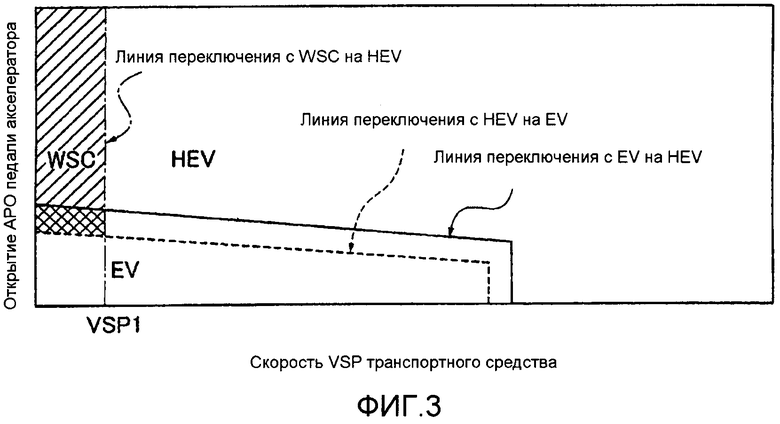
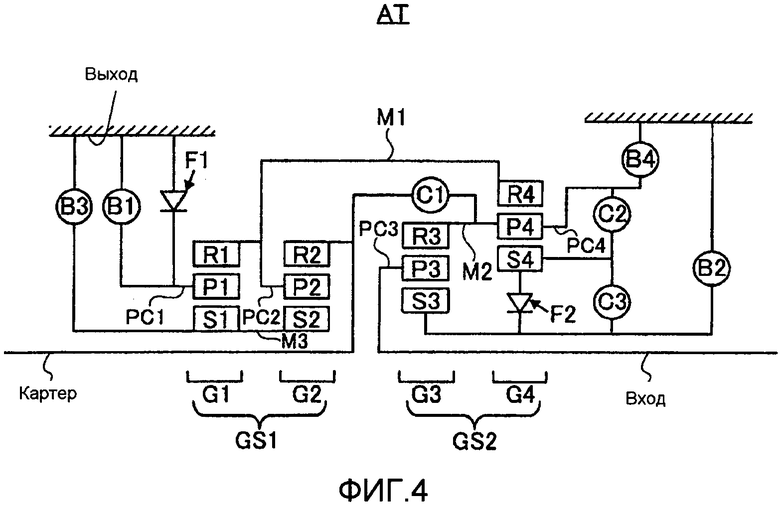
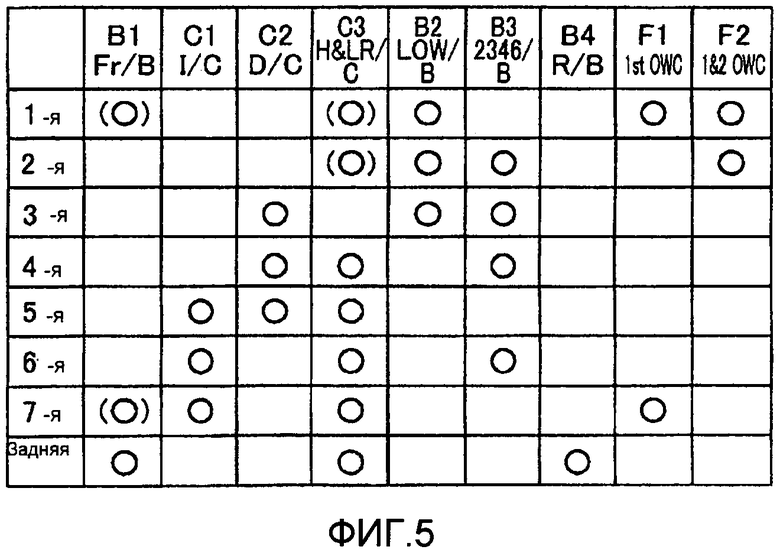
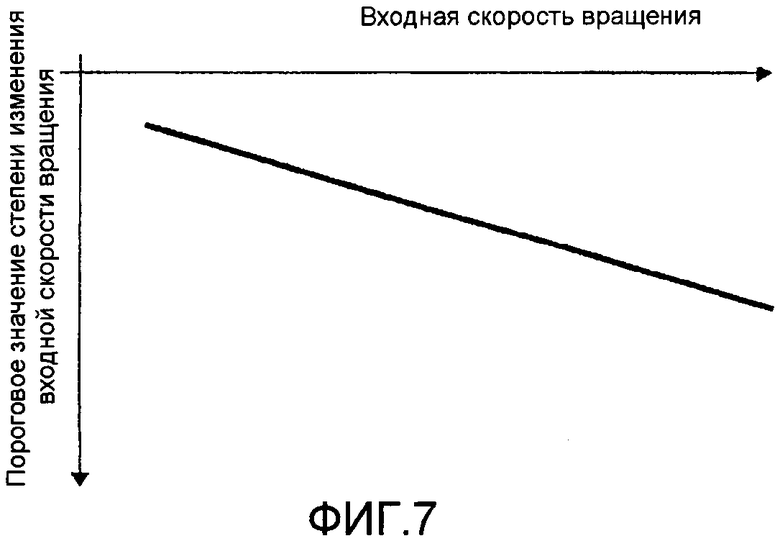
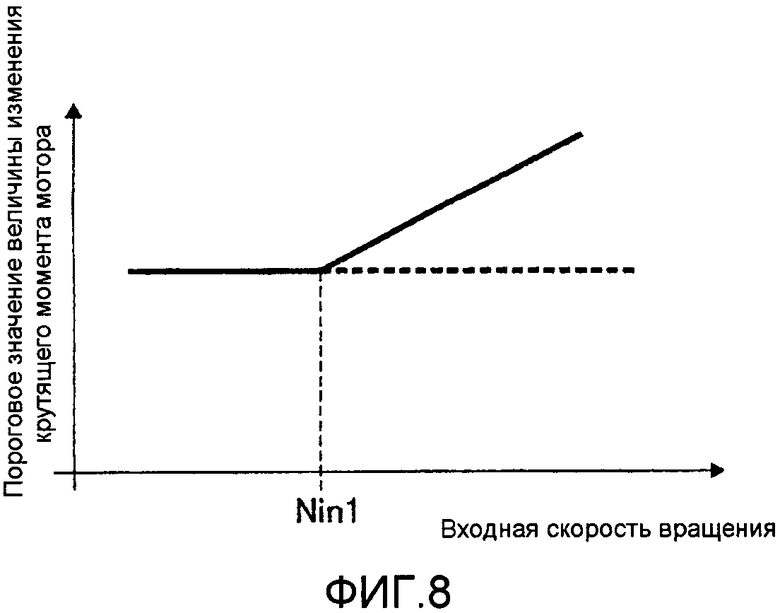
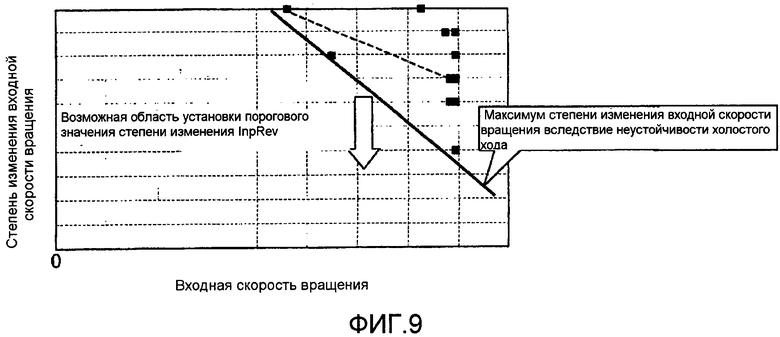
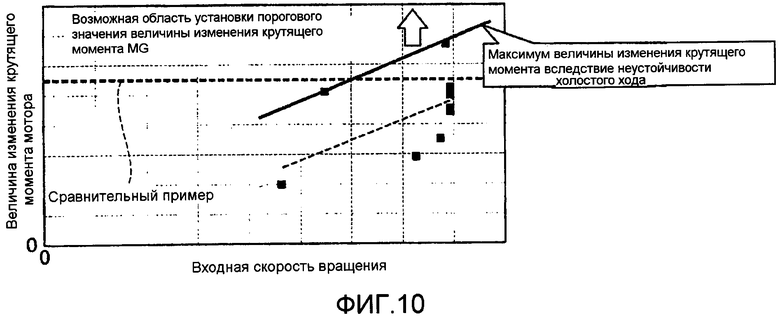
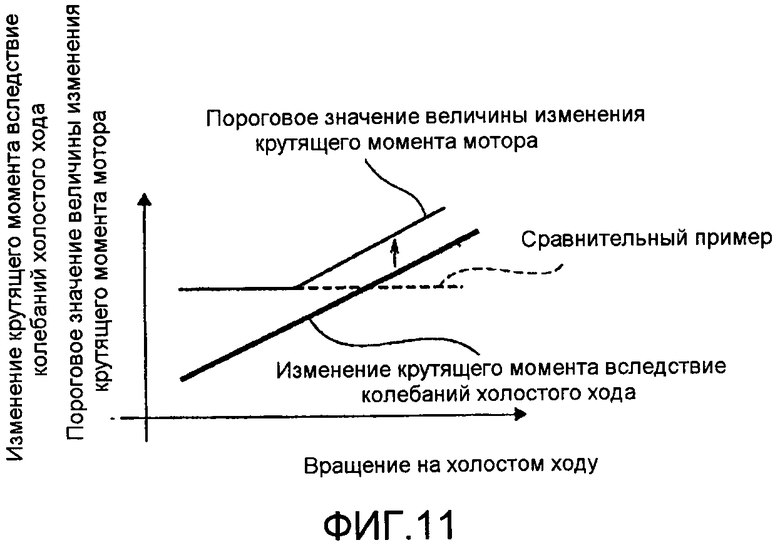
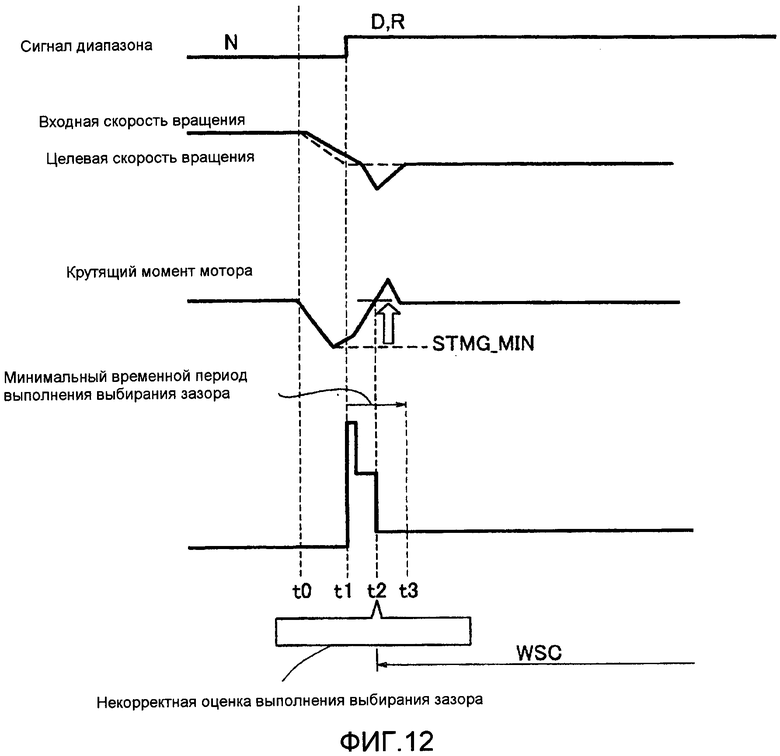
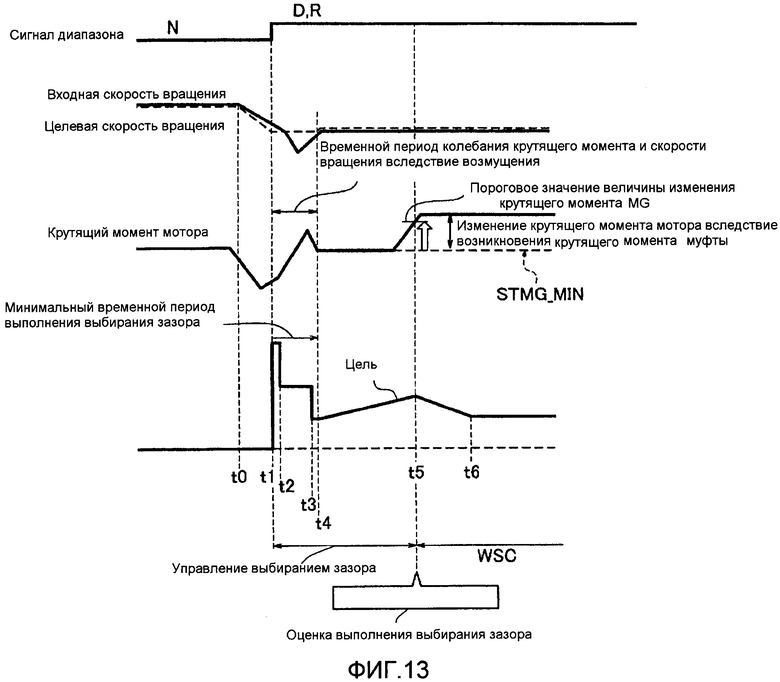
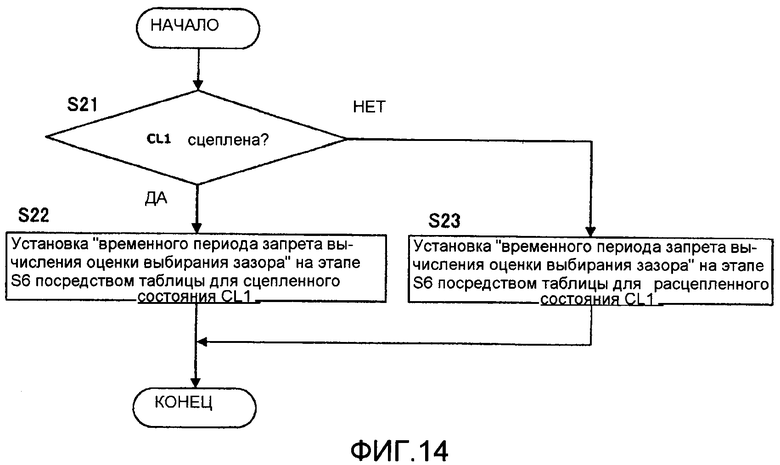
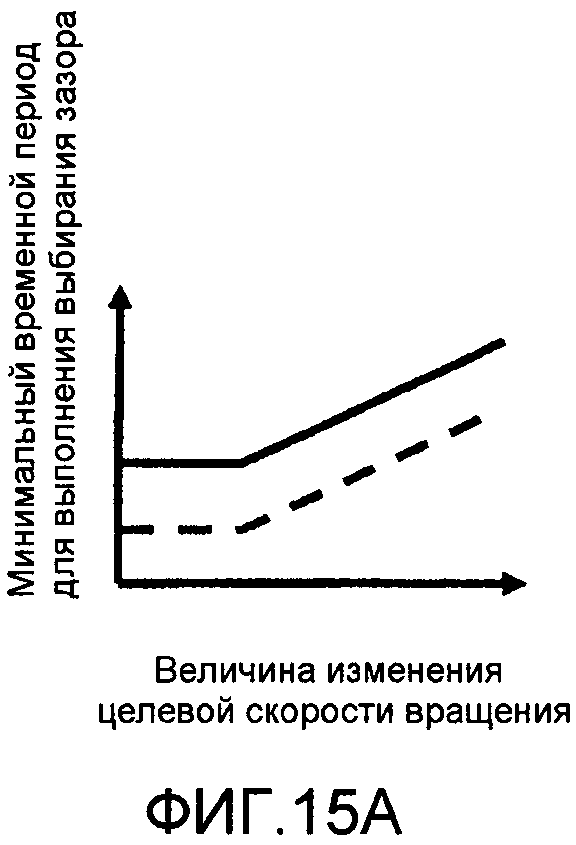
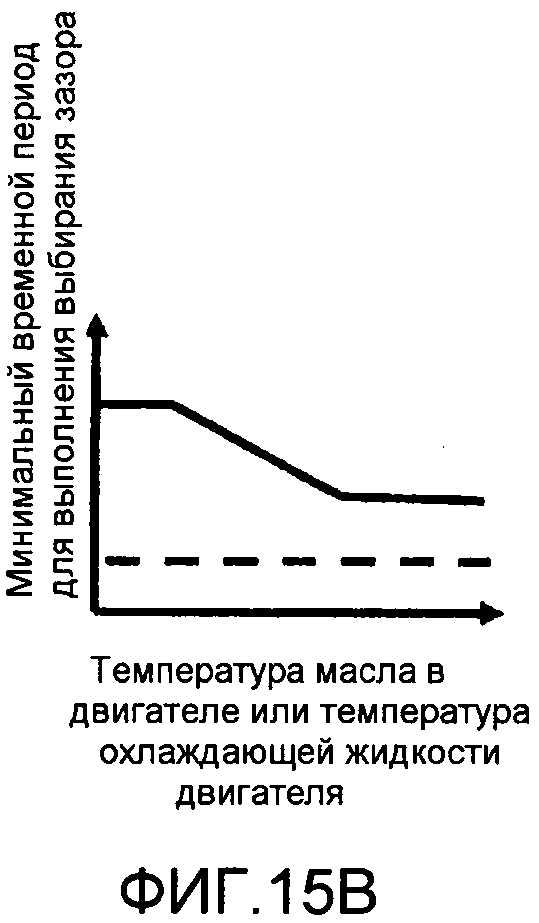
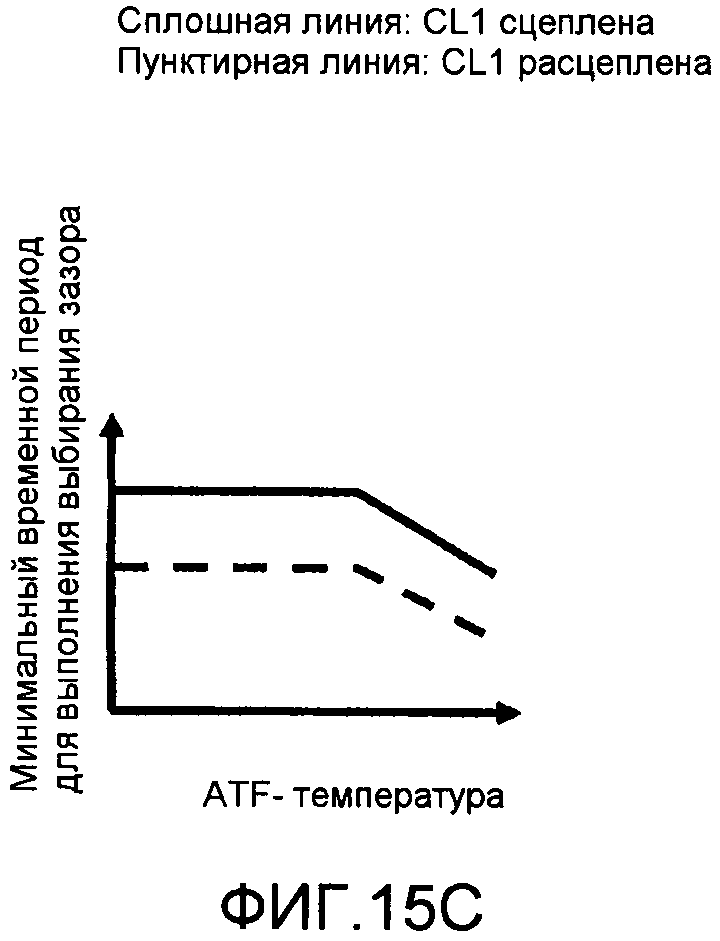
Изобретение относится к управлению гибридным транспортным средством. Устройство управления гибридного транспортного средства содержит источник приведения в движение; элемент фрикционного сцепления, сцепляющийся, когда выбирается диапазон приведения в движение; средство управления поддержанием входной скорости вращения и средство оценки начала сцепления, которое оценивает в ответ на условие, что элемент фрикционного сцепления начал сцепляться. Указанным условием является то, что параметр превысил или стал равным предварительно определенному пороговому значению в начальной области управления сцеплением, причем параметр изменяется вместе с вращательными колебаниями источника приведения в движение. Средство оценки начала сцепления начинает оценку после ожидания удовлетворения предварительно определенного условия после начала управления сцеплением. Предотвращается некорректная оценка начала сцепления. 10 з.п. ф-лы, 15 ил.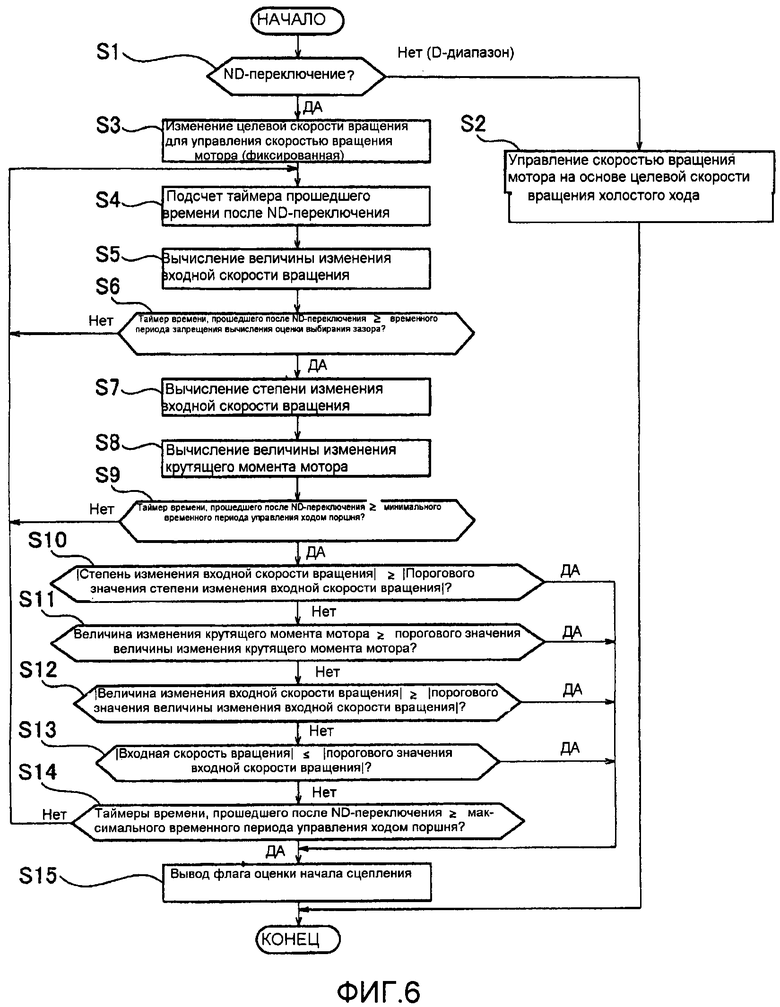
1. Устройство управления гибридного транспортного средства, содержащее:
источник приведения в движение, включающий в себя двигатель и мотор;
элемент фрикционного сцепления, расположенный в пути передачи движущей силы от источника приведения в движение к ведущему колесу, при этом элемент фрикционного сцепления сцепляется, когда выбирается диапазон приведения в движение;
средство управления поддержанием входной скорости вращения, которое выполняет посредством управления скоростью вращения мотора управление для поддержания входной скорости вращения элемента фрикционного сцепления на целевой скорости вращения, которая равна входной скорости вращения в начале управления сцеплением элемента фрикционного сцепления; и
средство оценки начала сцепления, которое оценивает в ответ на условие, что элемент фрикционного сцепления начал сцепляться, при этом указанное условие является условием того, что параметр превысил или стал равным предварительно определенному пороговому значению в начальной области управления сцеплением элемента фрикционного сцепления, причем параметр изменяется вместе с вращательными колебаниями источника приведения в движение;
при этом средство оценки начала сцепления начинает оценку после ожидания удовлетворения предварительно определенного условия после начала управления сцеплением элемента фрикционного сцепления.
2. Устройство по п. 1, в котором средство оценки начала сцепления применяет в качестве параметра величину изменения крутящего момента мотора, которая является величиной изменения нагрузки мотора, которая изменяется согласно управлению поддержанием входной скорости вращения.
3. Устройство по п. 1, в котором средство оценки начала сцепления применяет в качестве параметра степень изменения входной скорости вращения, которая является степенью изменения скорости вращения входного вала элемента фрикционного сцепления, при этом степень изменения входной скорости вращения изменяется вместе с вращательными колебаниями источника приведения в движение.
4. Устройство по п. 1, в котором средство оценки начала сцепления применяет в качестве параметров как величину изменения крутящего момента мотора, которая является величиной изменения нагрузки мотора, которая изменяется согласно управлению поддержанием входной скорости вращения, так и степень изменения входной скорости вращения, которая является степенью изменения скорости вращения входного вала элемента фрикционного сцепления, при этом степень изменения входной скорости вращения изменяется вместе с вращательными колебаниями источника приведения в движение.
5. Устройство по любому из пп. 1-4, в котором средство оценки начала сцепления устанавливает абсолютное значение предварительно определенного порогового значения большим, когда возможно оценить, что вращательные колебания источника приведения в движение являются большими, чем когда возможно оценить, что вращательные колебания источника приведения в движение являются небольшими.
6. Устройство по любому из пп. 1-4, в котором:
элемент фрикционного сцепления является элементом начала движения, при этом управление сцеплением элемента фрикционного сцепления начинается в ответ на операцию переключения автоматической коробки передач из диапазона без приведения в движение в диапазон приведения в движение; и
устройство управления гибридного транспортного средства включает в себя средство управления сцеплением с возможностью проскальзывания, которое начинает управление сцеплением с возможностью проскальзывания для компенсации дифференциального вращения между источником приведения в движение и ведущим колесом с выполнением управления перегрузочной способностью по сцеплению для получения передаваемого крутящего момента согласно требуемому крутящему моменту приведения в движение в ответ на оценку средством оценки начала сцепления того, что элемент фрикционного сцепления начал сцепляться.
7. Устройство по п. 1, в котором средство оценки начала сцепления начинает оценку после ожидания истечения предварительно определенного периода времени после начала управления сцеплением элемента фрикционного сцепления.
8. Устройство по п. 7, в котором:
второй элемент фрикционного сцепления расположен в пути передачи движущей силы между двигателем и мотором; и
предварительно определенный временной период устанавливается более длительным, когда второй элемент фрикционного сцепления сцеплен, чем когда второй элемент фрикционного сцепления расцеплен.
9. Устройство по п. 7 или 8, в котором предварительно определенный временной период устанавливается более длительным, когда температура рабочего масла для управления автоматической коробкой передач является низкой, чем когда температура рабочего масла является высокой.
10. Устройство по п. 7 или 8, в котором предварительно определенный временной период устанавливается более длительным, когда температура охлаждающей жидкости или температура масла двигателя является низкой, чем когда температура охлаждающей жидкости или температура масла двигателя является высокой.
11. Устройство по п. 7 или 8, в котором предварительно определенный временной период устанавливается более длительным, когда степень изменения целевой скорости вращения мотора непосредственно перед выбором диапазона приведения в движение является большой, чем когда степень изменения целевой скорости вращения мотора непосредственно перед выбором диапазона приведения в движение является небольшой.
| JP 2010077981 A, 08.04.2010 | |||
| JP 2010143296 A, 01.07.2010 | |||
| JP 2009006781 A, 15.01.2009 | |||
| JP 2009190584 A, 27.08.2009 | |||
| JP 2005231585 A, 02.09.2005 |

