Предлагаемое техническое решение относится к области космической техники и может быть использовано для доставки объектов экипажем пилотируемого космического аппарата (КА) из рабочего отсека КА на внешнюю поверхность КА и далее на целевую орбиту объекта.
Известен захват (патент RU 2213689, МПК7: B66C 1/28, B66C 1/42, B64G 4/00, В25B 9/00), позволяющий осуществлять надежную фиксацию захватываемого объекта, содержащий шарнирно связанные и подпружиненные пружиной сжатия рычаги с рабочими частями на одних концах и фиксатор, выполненный в виде двух шарнирно соединенных плеч.
Данный захват может быть использован для доставки объекта (например, сферического спутника) из КА на целевую орбиту, при этом одним из недостатков является отсутствие средств обеспечении надежности доставки, предотвращающих возможность несанкционированного расжатия рычагов захвата. Кроме того, захват не предоставляет удобных средств для придания доставляемому на орбиту объекту движения в требуемом направлении по окончании доставки.
Известен промышленный робот (патент SU 1400883, МПК4: B25J 18/06, B25J 1/02) и исполнительный орган промышленного робота (патент SU 1440711, МПК4: B25J 18/00, B25J 1/02), предназначенные для использования в том числе в условиях космоса и которые совмещают функции перемещения и захвата деталей. В корпусе, несущем исполнительный орган, размещены основной и дополнительный барабаны, связанные с индивидуальными приводами. На барабанах закреплена своими концами упругая лента, которая, проходя через направляющий механизм и направляющую втулку, образует удлинитель и петлю. Направляющая втулка связана с гибкой тягой, проходящей по обе стороны удлинителя и охватывающей петлю.
Данное устройство может быть использовано для доставки объекта (например, сферического спутника) из КА на целевую орбиту. При этом габаритные размеры механизма, реализующего захват и удержание доставляемого объекта, значительно превышают размеры самого объекта, что создает трудности для эксплуатации в ограниченном пространстве КА. В том числе не допускается возможность запуска больших спутников - например, размеры которых соизмеримы с размерами шлюзовой камеры КА. Указанные недостатки существенно ухудшают функциональные характеристики описанных устройств.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение доставки объекта в условиях невесомости при безусловном обеспечении надежности доставки и исключения потери объекта в открытом космосе в процессе доставки объекта на околоземную орбиту.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в исключении возможности потери объекта в открытом космическом пространстве в процессе доставки и обеспечении движения объекта в требуемом направлении по окончании доставки при минимизации габаритных размеров устройства.
Технический результат достигается тем, что устройство для доставки сферического объекта из КА на целевую орбиту характеризуется тем, что оно содержит держатель, на котором закреплен полусферический контейнер, скобу для крепления страховочного фала, закрепленную на держателе, элемент упора, размещенный внутри контейнера, не менее чем три рычага, равномерно размещенные по краю контейнера и выступающие за края контейнера, средство фиксации рычагов, съемную гибкую стяжку и разъемное соединение стяжки и контейнера, причем каждый рычаг снабжен регулируемым прижимным механизмом, выполненным в виде пружины, установленной между рычагом и контейнером, и регулируемым ограничителем расстояния между точками упора пружины в рычаг и в контейнер, при этом держатель выполнен в виде ручки, размер которой соответствует размеру перчатки скафандра космонавта, а стяжка выполнена с возможностью охвата ею объекта, помещенного в контейнер.
Технический результат достигается также тем, что средство фиксации рычагов выполнено в виде шнура, уложенного в пазы, выполненные по краям рычагов, при этом концы шнура соединены между собой с помощью разъемного соединения, причем пазы и точки упора пружин в рычаги расположены по разные стороны от осей поворота рычагов.
Суть предлагаемого устройства поясняется на фиг.1.
На фиг.1 введены обозначения:
1 - держатель;
2 - контейнер;
3 - скоба для крепления страховочного фала;
4 - элемент упора;
5 - рычаг;
6 - съемная гибкая стяжка;
7 - разъемное соединение стяжки и контейнера;
8 - пружина;
9 - регулируемый ограничитель расстояния между точками упора пружины в рычаг и в контейнер;
10 - шнур;
11 - паз;
12 - разъемное соединение концов шнура;
13 - ось поворота рычага;
14 - объект доставки;
А - проекция концевых точек рычагов, на которых размещены пазы, на ось симметрии контейнера;
В - центр элемента упора;
ВА - ось симметрии контейнера;
ОВ - радиус кривизны полусферического контейнера.
Устройство для доставки объекта включает держатель 1, полусферический контейнер 2, скобу для крепления страховочного фала 3, элемент упора 4, не менее, чем три рычага 5, средство фиксации рычагов, съемную гибкую стяжку 6 и разъемное соединение стяжки и контейнера 7.
Держатель 1 скреплен с полусферическим контейнером 2.
Скоба для крепления страховочного фала 3 закреплена на держателе 1.
Элемент упора 4 размещен внутри контейнера 2.
Рычаги 5 равномерно размещены по краю контейнера 2 и выступают за края контейнера 2.
Каждый из рычагов 5 снабжен регулируемым прижимным механизмом, выполненным в виде пружины 8, установленной между рычагом 5 и контейнером 2, и регулируемым ограничителем расстояния между точками упора пружины в рычаг и в контейнер 9.
Например, регулируемый ограничитель расстояния между точками упора пружины в рычаг и в контейнер 9 содержит винт, проходящий сквозь отверстие в рычаге 5 и входящий в снабженное резьбой отверстие в контейнере 2, и гайку, установленную на головке упомянутого винта, размер которой превышает упомянутое отверстие в рычаге 5.
Средство фиксации рычагов может быть выполнено в виде шнура 10, уложенного в пазы 11, которые размещены по краям рычагов 5. Концы шнура 10 соединены между собой с помощью разъемного соединения концов шнура 12. Паз 11, размещенный по краю рычага 5, и точка упора пружины 8 в рычаг 5 расположены по разные стороны от оси поворота рычага 13.
Разъемное соединение концов шнура 12 может быть выполнено в виде соединения «велкро».
Съемная гибкая стяжка 6 выполнена с возможностью охвата ею объекта доставки, помещенного в контейнер 2. Разъемное соединение стяжки и контейнера 7 может быть выполнено в виде соединения «велкро». Функционально съемная гибкая стяжка 6 и разъемное соединение стяжки и контейнера 7 составляют съемное средство фиксации объекта в контейнере.
Съемная гибкая стяжка 6 может быть выполнена в виде соединенных между собой шнуров, образующих равносторонний треугольник, в вершинах которого закреплены шнуры, свободные концы которых являются окончаниями стяжки, на которых размещены элементы разъемного соединения стяжки и контейнера 7 «велкро». Одна часть разъемного соединения стяжки и контейнера 7 «велкро» размещена на концах образующих съемную гибкую стяжку 6 шнуров, а другая часть разъемного соединения стяжки и контейнера 7 «велкро» размещена на верхних поверхностях установленных на контейнере 2 рычагов 5.
Держатель 1 выполнен в виде прямоугольной ручки, состоящей из рукоятки и элементов, соединяющих рукоятку с контейнером 2. Размер ручки соответствует размеру перчатки скафандра космонавта (в том числе объему, заключенному в сжатой перчатке скафандра космонавта) - например, профиль рукоятки ручки составляет квадрат 25 мм × 25 мм, длина рукоятки ручки составляет 130 мм, длина элементов ручки, соединяющих рукоятку ручки с контейнером, составляет 90 мм.
Ось симметрии контейнера 2 проходит через центр элемента упора 4.
Отношение расстояния от проекции концевых точек рычагов 5, на которых размещены пазы 11, на ось симметрии контейнера 2, до центра элемента упора 4 к радиусу кривизны полусферического контейнера 2 превышает 1. Данное условие получается из соотношения:

Например, для представленного на фиг.1 устройства данное отношение составляет  . Такое значение указанного отношения обеспечивает то, что когда концы рычагов 5 прижаты к вставленному в контейнер 2 сферическому объекту 16, они охватывают объект таким образом, что охваченная часть объекта составляет более его половины, чем создается препятствие для выхода объекта из контейнера.
. Такое значение указанного отношения обеспечивает то, что когда концы рычагов 5 прижаты к вставленному в контейнер 2 сферическому объекту 16, они охватывают объект таким образом, что охваченная часть объекта составляет более его половины, чем создается препятствие для выхода объекта из контейнера.
Работу с устройством рассмотрим на примере осуществления транспортировки сферического спутника космонавтом из герметичного отсека КА на внешнюю поверхность КА и доставки сферического спутника на околоземную орбиту.
С помощью регулируемого ограничителя расстояния между точками упора пружины в рычаг и в контейнер 9 осуществляют приведение данного расстояния к минимальному значению. Это осуществляется регулировкой вышеупомянутых винтов. После выполнения данной операции свободные концы рычагов 5 разведены в стороны от оси симметрии контейнера 2.
Космонавт помещает объект доставки - сферический спутник - в контейнер 2. С помощью регулируемого ограничителя расстояния между точками упора пружины в рычаг и в контейнер 9 осуществляют настройку силы сжатия пружины 8 под массу доставляемого объекта. После чего космонавт вкладывает шнур 10 в пазы 11 и соединяет концы шнура 10 с помощью разъемного соединения концов шнура 12 «велкро». Космонавт охватывает спутник съемной гибкой стяжкой 6 и фиксирует стяжку 6 на контейнере 2 разъемным соединением стяжки и контейнера 7 «велкро».
Космонавт в скафандре берется рукой за держатель 1 и транспортирует устройство с зафиксированным в нем спутником в шлюзовую камеру КА. Космонавт закрепляет свободный конец страховочного фала за скобу для крепления страховочного фала 3. При этом другой конец страховочного фала закреплен на КА. Космонавт удерживает устройство с зафиксированным в нем спутником за держатель 1 и транспортирует устройство с зафиксированным в нем спутником через выходной люк на внешнюю поверхность КА. Космонавт разъединяет разъемное соединение стяжки и контейнера 7 и снимает съемную гибкую стяжку 6. Космонавт разъединяет разъемное соединение концов шнура 12 и снимает шнур 10.
Космонавт рукой удерживает устройство с зафиксированным в нем спутником за держатель 1, ориентирует устройство таким образом, что направление от держателя 1 вдоль оси симметрии контейнера 2 совпадает с требуемым направлением отброса спутника, после чего совершает ускоренное движение рукой вдоль требуемого направления отброса спутника с фиксацией остановки руки в конце данного движения. В процессе этого движения руки на спутник воздействует элемент упора 4. По окончании данного движения руки спутник по инерции продолжает движение и перемещается относительно устройства в направлении оси симметрии контейнера 2, разжимая концы рычагов 5 и преодолевая силу трения в точках контакта концов рычагов 5 со спутником. В конце данного перемещения спутник отходит от рычагов 5 и начинает орбитальное движение относительно Земли.
Космонавт вносит устройство, съемную гибкую стяжку 6 и шнур 10 в шлюзовую камеру КА. На время хранения устройства в КА съемная гибкая стяжка 6 и шнур 10 укладываются внутрь контейнера 2.
Опишем технический эффект предлагаемого изобретения.
Предлагаемое устройство обеспечивает выполнение доставки объекта в условиях невесомости при безусловном обеспечении надежности доставки и исключения возможности потери объекта в открытом космосе в процессе доставки, а также обеспечивает придание объекту движения в требуемом направлении по окончании доставки объекта при минимизации габаритных размеров устройства.
В том числе предлагаемое устройство обеспечивает надежное удержание доставляемого объекта на всех стадиях доставки в условиях невесомости: внутри герметичного отсека KA и при транспортировании объекта через шлюзовую камеру на внешнюю поверхность KA, обеспечивает удобство и эргономичность устройства для его использования космонавтом, обеспечивает необходимую страховку от выпадения и потери объекта в условиях открытого космического пространства.
При этом устройство имеет минимальные габаритные размеры. Так, при хранении устройства в КА съемная гибкая стяжка и шнур располагаются внутри контейнера и размеры устройства, определяемые в основном размером полусферического контейнера, меньше размера доставляемого сферического спутника.
Достижение технического результата в предложенном устройстве обеспечивается введением предложенных элементов устройства, также введением предложенных функциональных связей между элементами устройства и предложенным исполнением уже известных элементов устройства. В том числе, достижение технического результата в предложенном устройстве обеспечивается:
- в части безусловного обеспечения надежности доставки - использованием в устройстве двух уровней фиксации объекта в контейнере: один уровень фиксации объекта в контейнере функционально реализован фиксацией положения объекта в контейнере с помощью разъемного средства фиксации рычагов, другой уровень фиксации объекта в контейнере функционально реализован с съемной гибкой стяжкой и разъемным соединением стяжки и контейнера, при этом указанные два уровня фиксации положения объекта в контейнере приспособлены для последовательного снятия фиксации в порядке, указанном в описании работы с устройством. Указанные два уровня фиксации положения объекта в контейнере соответствуют двум уровням обеспечения надежности доставки;
- в части исключения возможности потери объекта в открытом космосе в процессе доставки - введением в устройство скобы для крепления страховочного фала и вышеописанных средств фиксации объекта в контейнере;
- в части обеспечения придания объекту движения в требуемом направлении по окончании доставки объекта - введением в устройство элемента упора, а также равномерным расположением не менее чем трех рычагов по периметру контейнера, чем обеспечивается одновременный отход объекта от всех рычагов в момент окончания доставки;
- в части минимизации габаритных размеров устройства - использованием в устройстве одного полусферического контейнера и съемной гибкой стяжки, что обеспечивает то, что размеры устройства меньше размера объекта доставки;
- в части обеспечения возможности использования устройства в открытом космосе - выполнением держателя приспособленным для его захвата перчаткой скафандра космонавта.
Введение в устройство регулируемого ограничителя расстояния между точками упора пружины в рычаг и в контейнер обеспечивает возможность настройки силы сжатия пружины под массу доставляемого объекта, а также под физиологические особенности конкретного космонавта, что расширяет функциональные характеристики устройства, повышает его удобство и эргономичность.
Выполненная оценка эффективности применения предлагаемого изобретения для транспортировки объекта - сферического спутника - из герметичного отсека МКС на ее внешнюю поверхность и последующей доставки его на околоземную орбиту показала, что использование предлагаемого устройства качественно повышает надежность и эффективность выведения объекта на околоземную орбиту, обеспечивая при этом удобство и гарантированную надежность выведения.
Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено по известным технологиям.
Изобретение относится к области космической техники и может быть использовано для доставки сферических объектов экипажем пилотируемого космического аппарата (КА) из рабочего отсека КА на внешнюю поверхность КА и далее на целевую орбиту объекта. Устройство содержит держатель, на котором закреплен полусферический контейнер, скобу для крепления страховочного фала, элемент упора, размещенный внутри контейнера, не менее, чем три рычага, равномерно размещенные по краю контейнера и выступающие за края контейнера, средство фиксации рычагов, съемную гибкую стяжку и разъемное соединение стяжки и контейнера. Каждый рычаг снабжен регулируемым прижимным механизмом, выполненным в виде пружины, установленной между рычагом и контейнером, и регулируемого ограничителя расстояния между точками упора пружины в рычаг и в контейнер. Держатель выполнен в виде ручки, размер которой соответствует размеру перчатки скафандра космонавта, а стяжка выполнена с возможностью охвата ею объекта, помещенного в контейнер. Технический результат заключается в исключении возможности потери объекта в открытом космическом пространстве в процессе доставки и обеспечении движения объекта в требуемом направлении по окончании доставки. 1 з.п. ф-лы, 1 ил.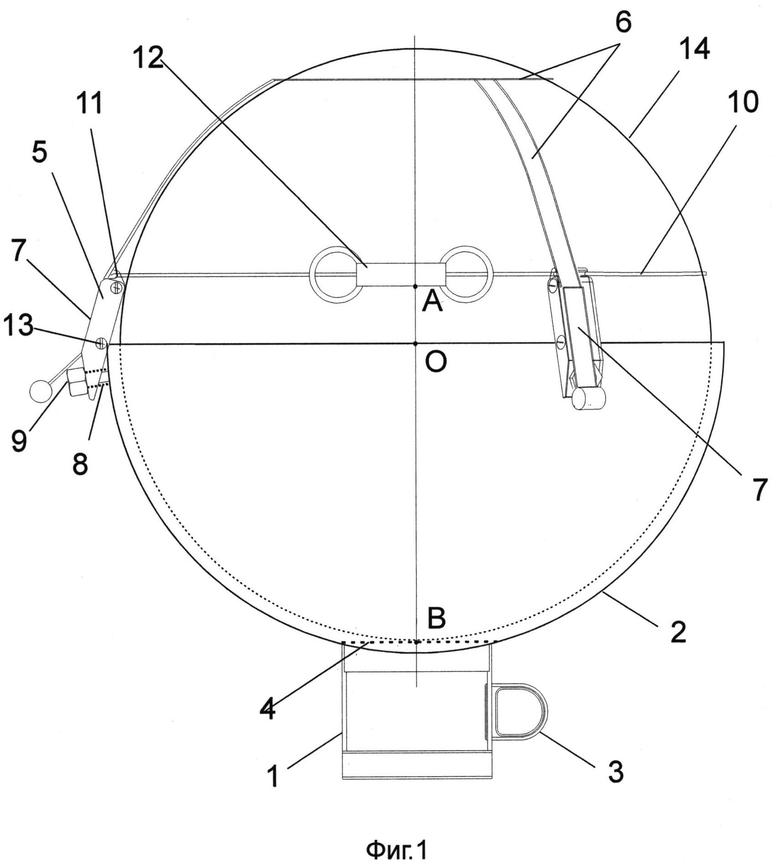
1. Устройство для доставки сферического объекта из космического аппарата на целевую орбиту, характеризующееся тем, что оно содержит держатель, на котором закреплен полусферический контейнер, скобу для крепления страховочного фала, закрепленную на держателе, элемент упора, размещенный внутри контейнера, по меньшей мере три рычага, равномерно размещенные по краю контейнера и выступающие за края контейнера, средство фиксации рычагов, съемную гибкую стяжку и разъемное соединение стяжки и контейнера, причем каждый рычаг снабжен регулируемым прижимным механизмом, выполненным в виде пружины, установленной между рычагом и контейнером, и регулируемого ограничителя расстояния между точками упора пружины в рычаг и в контейнер, при этом держатель выполнен в виде ручки, размер которой соответствует размеру перчатки скафандра космонавта, а стяжка выполнена с возможностью охвата ею доставляемого объекта, помещенного в упомянутый контейнер.
2. Устройство для доставки объекта по п.1, отличающееся тем, что средство фиксации рычагов выполнено в виде шнура, уложенного в пазы, выполненные по краям рычагов, при этом концы шнура соединены между собой с помощью разъемного соединения, а пазы и точки упора пружин в рычаги расположены по разные стороны от осей поворота рычагов.
| ЗАХВАТ | 2001 |
|
RU2213689C2 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1440711A1 |
| Промышленный робот | 1986 |
|
SU1400883A1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ ПАССИВНЫХ КА И ИХ ФРАГМЕНТОВ | 1998 |
|
RU2141436C1 |
| US 6830222 B1, 14.12.2004 | |||

