00
СХ) 00
Vuz.2
Изобретение относится к мапшно } строению и предназначено для исполь- Кования в промьшшеИных роботах, при- меняемг гх для вьтолнения подъемно- транспортных, монтажно-сборочных и технологических операций, а также в дистанционных манипуляторах, работанг- в зонах радиоактивного излучения, в космосе.
Цель изобретения - расширение технологических возможностей за счет Ьовмещения функций перемещения и зах- рата деталей.
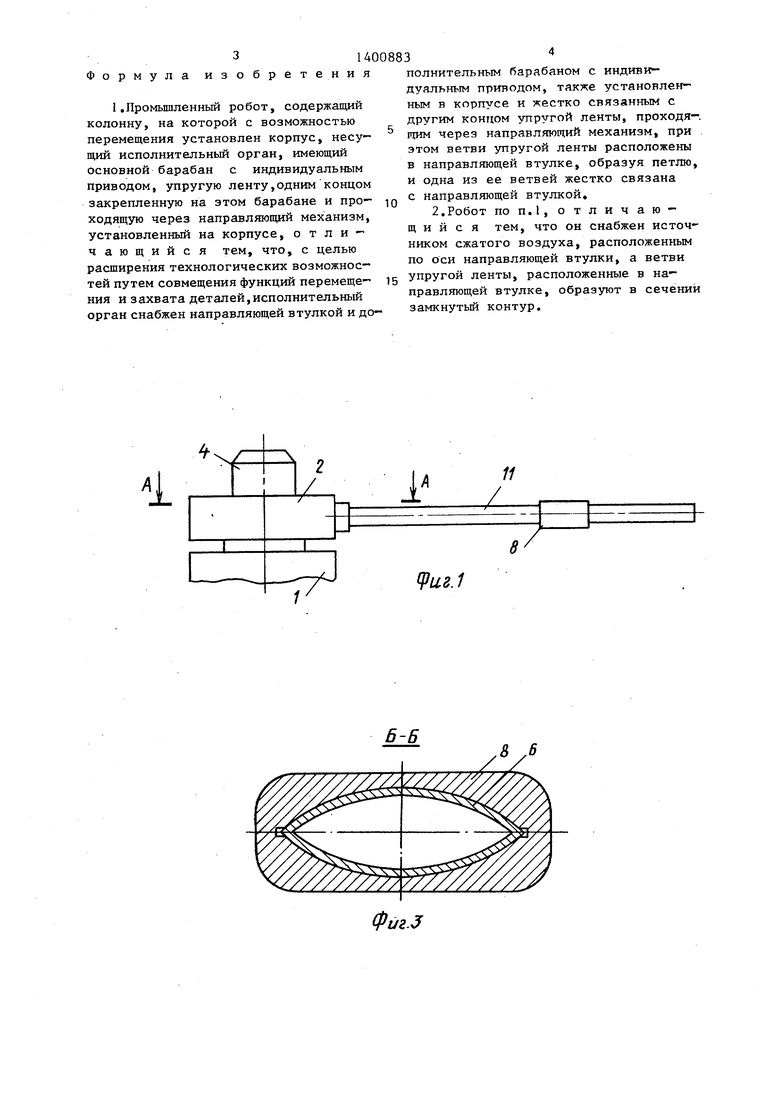
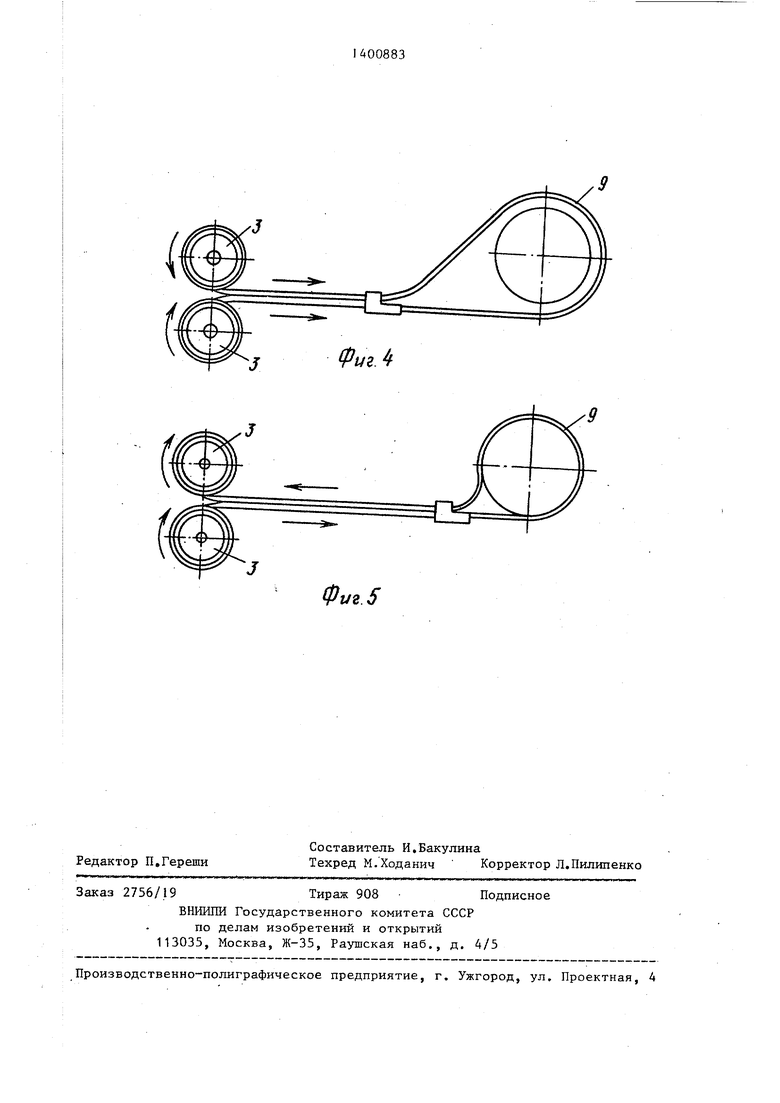
I На фиг.1 изображен промьшшенный робот, общий вид; на фиг«2 - разрез V-A на фиг,1; на фиг.З - сечение Б-Б на фиг.2; на фиг.4 - исполнительный орган в рабочем положении; на фиг.5 - то же, другой вариант.
Промышленньй робот содержит колонну 1 , на которой с возможностьи перемещения установлен корпус 2, несущий исполнительный орган. Внутри корпуса размещены основной и дополнительный барабаны 3, связанные с индивидуальными приводами 4 например электричес- |кими двигателями, посредством валов |5, На барабанах 3 закреплены соответ- |Ственно концы упругой ленты 6. На JKopnyce 2 закреплен направляющий механизм 7, например направляющая втулка, через которую проходят ветви упру гой ленты 6. Ветви упругой ленты 6 расположены в направляющей втулке 8, образуя петлю 9. В отверстии этой втулки закреплена одна из ветвей упругой ленты 6, Источник сжатого воздуха (не показан) размещен в корпусе 2, при этом его вьшодная трубка lO расположена по оси направляющей втулки 8 и направлена в полость, образованную перегибами упругой ленты 6. Перегибы упругой ленты 6 образуют не- супщй элемент (удлинитель) 11.
Промышле.нный робот работает следующим образом.
В исходном состоянии упругая лента 6 намотана на барабаны 3, петля 9 располагается вблизи корпуса 2. При вращении барабанов 3 от соответствую- ;щих приводов 4 ветви упругой ленты ( сматываются с барабанов и вытаякива- ются из корпуса 2, проходят через направляющий механизм 7 и образуют несущий элемент (удлинитель) 11, при чем скорости вращения барабанов 3 должны быть равными, чтобы петля 9 не стягивалась. Петля 9 вьщвигается
0
5 0
5 30jO5
Q
5
5
на удлинителе 11 на требуемую длину и располагается над деталью. Затем промьшшенньш робот опускает весь исполнительный орган, петля 9 надевается на деталь.
Далее ветвь упругой ленты 6 с закрепленной направляющей втулкой В начинает сматываться с барабана 3, а другая ветвь упругой ленты наматывается на барабан, тем самым петля 9 затягивается и деталь зажимается. Исполнительный орган с зажатой деталью можно перемещать в пространстве с Одновременным удалениемуили приближением детали к корпусу 2 путем одновременного сматывания или наматывания упругой ленты 6 на барабаны 3. После доставки детали в нужную позицию, петля 9 отпускает деталь путем нама- тьтания на барабан ветви упругой ленты 6 с закрепленной направляющей втулкой 8 и сматьюания с барабана другой ветви упругой ленты.
Промышленным роботом исполнитель- ньш орган поднимается над деталью, затем упругая лента 6 наматывается на барабаны 3, петля 9 движется к корпусу 2 и принимает исходное положение. Подаваемый из источника сжатый воздух по трубке 10 в полость удлинителя 11 создает внутри него избыточное давление, что препятствует попаданий пыли на трущиеся части ленты 6, а также позволяет производить обдув детали с целью удаления стружки, охлаждения, нагревания.
В предлагаемом исполнительном органе промьшленного робота упругая лента является одновременно удлинителем и захватом, что упрощает конструкцию - вместо многозвенной системы рычагов один упругий элемент. В исходном состоянии исполнительный орган имеет малые габариты. Выдвижение удлинителя и захват детали осуществляется приводами, установленными в корпусе, что облегчает Подвижную часть исполнительного органа. Предлагаемый исполнительный орган позволяет захватьгоать и удерживать объекты различной формы. Отсутствие таар- нирных узлов трения позволяет механизму безаварийно работать в экстремальных условиях: в вакууме, в открытом космосе, в воде, в запыленной и загрязненной атмосфере.
Формула изобретения
1.Промышленный робот, содержащий колонну, на которой с возможностью перемещения установлен корпус, несущий исполнительный орган, имеющий основной барабан с индивидуальным приводом, упругую ленту,одним концом закрепленную на этом барабане и проходящую через направляющий механизм, установленный на корпусе, отличающийся тем, что, с целью расщирения технологических возможностей путем совмещения функций перемещения и захвата деталей,исполнительный орган снабжен направляющей втулкой и до-
полнительным барабаном с индивидуальным приводом, также установленным в корпусе и жестко связанным с другим концом упругой ленты, проходя-, щим через направл5пощий механизм, при этом ветви упругой ленты расположены в направляющей втулке, образуя петлю, и одна из ее ветвей жестко связана с направляющей втулкой,
2.Робот ПОП.1, отличающийся тем, что он снабжен источником сжатого воздуха, расположенным по оси направляющей втулки, а ветви упругой ленты, расположенные в направляющей втулке, образуют в сечений замкнутый контур.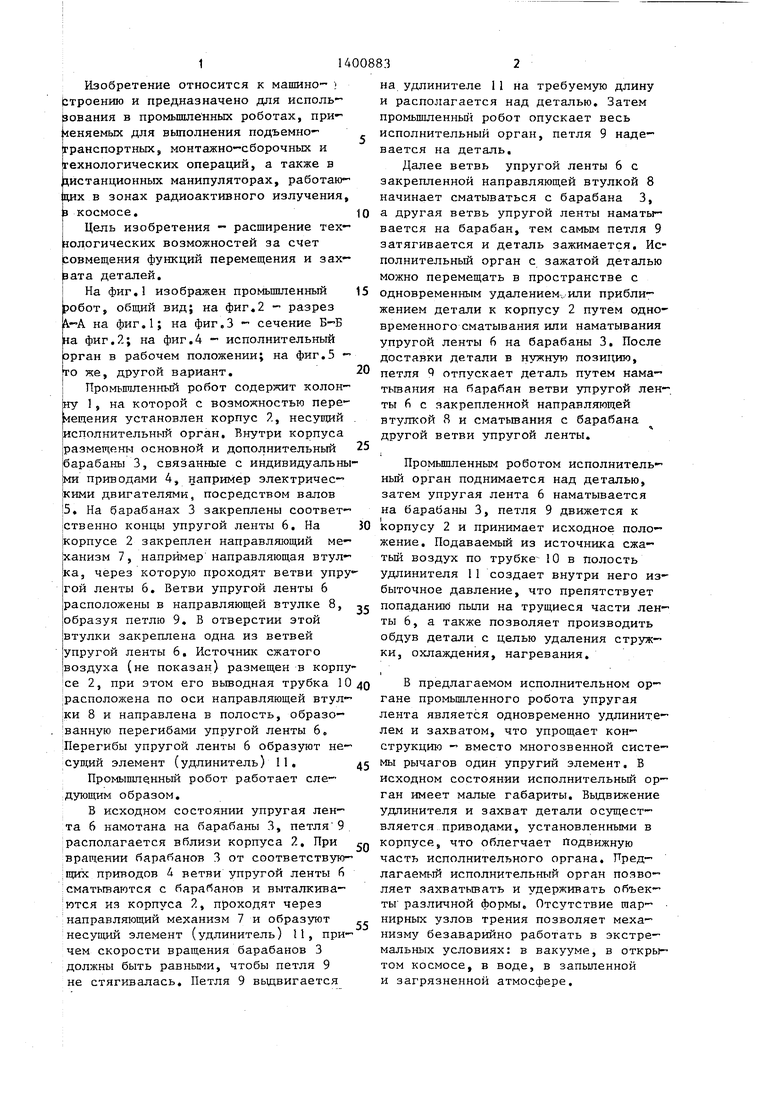
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1987 |
|
SU1440711A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1504095A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530442A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530441A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1493462A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1521589A1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ОБЪЕКТА | 2012 |
|
RU2530585C2 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1437220A1 |
| ЗАХВАТ | 1992 |
|
RU2043916C1 |
| Захват промышленного робота | 1978 |
|
SU768634A1 |
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для выполнения подъемно- транспортных, монтажно-сборочных и технологических операций, а также в дистанционных манипуляторах, работающих в зонах радиоактивного излучения, в космосе. Целью изобретения является расширение технологических возможностей за счет совмещения функций перемещения и захвата деталей. Для этого на колонне установлен корпус 2, несущий исполнительный орган. В корпусе 2 размещены основной и дополнительный барабаны 3, связанные с индивидуальными приводами. На барабанах 3 закреплены соответственно концы упругой ленты 6. На корпусе 2 закреплен направляющий механизм,7, через который проходят ветви упругой ленты 6. Ветви упругой ленты 6 расположены в направляющей втулке 8, образуя петлю 9. В отверстии этой втулки закреплена одна и& ветвей упругой ленты 6. Источник рабочей среды размещен в корпусе ., его выводная трубка 1П расположена на оси направляющей втулки 8 и направлена в полость, образованную перегибами упругой ленты 6. 1 з.п. ф-лы. 5 ил. (Л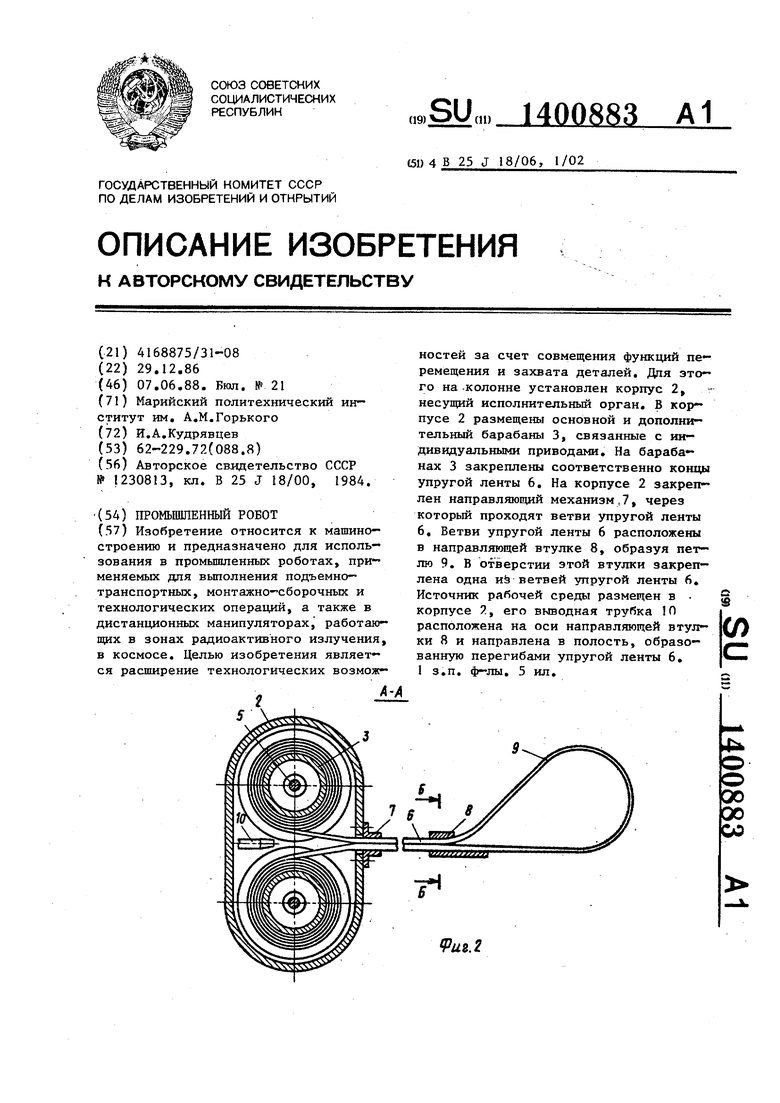
//
(Риг.1
6-6
Фиг.З
-j Фиг.
Фиг. 5
| Манипулятор | 1984 |
|
SU1230813A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
