(Л
Ю
4 4
(f u.e. Z
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для выполнения подъемно-транспортных, монтажно-сборочных и технологических операций, а также в дистанционных манипуляторах, работаюш,их в зонах радиоактивного излучения, в космосе.
Цель изобретения - расширение технологических возможностей за счет обеспечения вращения детали в захвате.
На фиг. 1 изображен исполнительный орган промышленного робота, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - схема исполнительного органа промыщленного робота при выдвижении удлинителя; на фиг. 5 - то же, при захвате детали; на фиг. 6 - то же, при вращении детали.
Исполнительный орган промыщленного робота содержит корпус 1, внутри которого размешены барабаны 2 и дополнительные барабаны 3, связанные с индивидуальными приводами 4 и 5, например электродвигателями. На барабанах 2 закреплена своими концами упругая лента 6, например стальная. Упругая лента 6, проходя через направляющий механизм 7, закрепленный на корпусе, и направляющую втулку 8, деформируется, получая корытообразную форму, и образует на участке между направляющим механизмом 7 и направляющей втулкой 8- удлинитель 9, а на участке за направляю- ш,ей втулкой 8 - петлю 10. Направляю щая втулка 8 связана с гибкой тягой 11, проходящей по обе стороны удлинителя 9 и охватывающей петлю 10. Концы гибкой тяги связаны с дополнительными барабанами 3.
Направляющей механизм 7 и направляющая втулка 8 изготовлены из материала . с малы.м коэффициентом трения, например, из фторопласта. Исполнительный орган расположен на промышленном роботе 12
Исполнительный орган промышленного робота работает следующим образом.
В исходном состоянии упругая лента 6 намотана на барабаны 2, петля 10 располагается вблизи корпуса 1, гибкая тяга 11 намотана на барабаны 3. При вращении барабанов 2 от приводов 4 упругая лента 6 сматывается и выталкивается из корпуса 1, проходя через направляющий механизм 7, образуя удлинитель 9. Петля 10 таким образом выдвигается на удлинителе 9 на требуемую длину и располагается над деталью. Затем промышленный робот 12 опускает весь исполнительный орган. Петля 10 надевается на деталь.
Вступают в работу барабаны 3 с закрепленными на них концами гибкой тяги 11.
Один конец гибкой тяги 11 сматывается с барабана 3, другой - наматывается на барабан 3, тем самым перемещая направ-- ляющую втулку 8 и затягивая петлю 10.
При этом барабаны 2 заторможены. Деталь затягивается петлей 10. Исполнительный орган с .зажатой деталью можно перемещать в пространстве с одновременным удалением или приближением петли 10 с деталью к корпусу 1 путем одновременного
сматывания или наматывания упругой ленты 6 и гибкой тяги 11 на барабаны 2 и 3.
Деталь также можно вращать путем наматывания одного конца упругой ленты 6 и сматывания другого ее конца на барабаны 2 при заторможенных барабанах 3. После установки детали в нужную позицию и осуществления ее поворота петля 10 отпускает деталь путем наматывания одного конца гибкой тяги 11 и сматывания другого ее конца на барабаны 3, перемещая
направляющую втулку 8 к корпусу 1. Промышленным роботом 12 исполнительный орган поднимается над деталью. Одновременным наматыванием упругой ленты 6 и гибкой тяги 11 на барабаны 2 и 3 петля 10 принимает исходное положение у корпуса 1. В предлагаемом исполнительном органе гибкая лента является одновременно удлинителем, захватом и приводным механизмом, что упрощает конструкцию - вместо многозвенной системы рычагов - один
упругий элемент. В исходном состоянии исполнительный орган имеет малые габариты. Выдвижение удлинителя, захват детали и вращение ее осуществляются приводами, установленными в корпусе, что значительно облегчает подвижную часть исполнительного
органа, который позволяет манипулировать объектами различной формы.
Формула изобретения
Исполнительный орган промышленного робота, содержащий корпус, установленные в нем барабаны с индивидуальными приводами, направляющий механизм, закрепленный на корпусе, и упругую ленту, проходящую через направляющий механизм и на- правляюшую втулку, образующую петлю и своими концами жестко связанную с соответствующими барабанами, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения вра- шения детали в захвате, он снабжен двумя дополнительными барабанами с индивидуаль ными приводами и гибкой тягой, охватывающей упругую ленту, связанную своими концами с дополнительными барабанами и жестко связанную с направляющей втулкой.
А
L, УЬ rjv М (
/2
t;
с

| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1988 |
|
SU1530442A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1504095A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530441A1 |
| Промышленный робот | 1986 |
|
SU1400883A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1493462A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1521589A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1437220A1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ОБЪЕКТА | 2012 |
|
RU2530585C2 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ШИН | 2000 |
|
RU2223861C2 |
| Исполнительный орган манипулятора | 1987 |
|
SU1493460A1 |

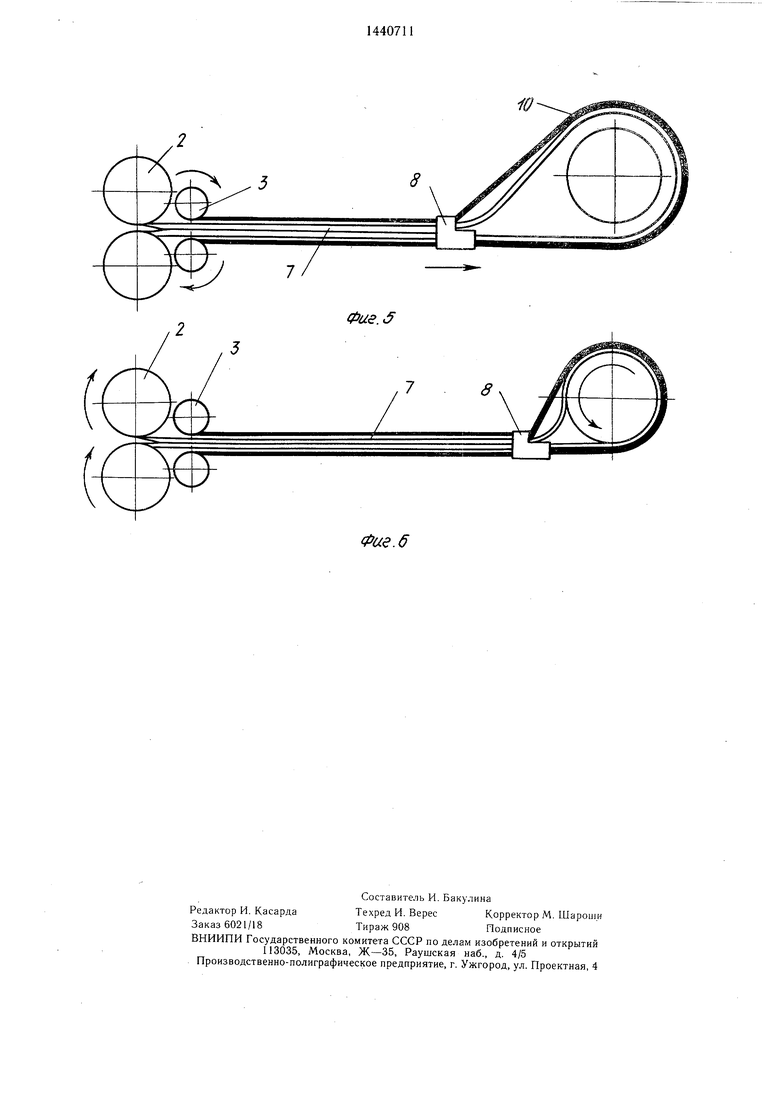
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для выполнения подъемно-транспортных, монтажно-сборочных и технологических операций, а также в дистанционных манипуляторах, работаюш,их в зонах радиоактивного излучения, в космосе. Целью изобретения является расширение технологических возможностей за счет обеспечения враш,ения детали в захвате. В корпусе 1 размещены барабаны 2 и дополнительные барабаны 3, связанные с индивидуальными приводами. На барабанах 2 закреплена своими концами упругая лента 6, которая, проходя через направляющий механизм 7 и направляющую втулку 8, образует удлинитель 9 и петлю 10. Направляющая втулка 8 связана с гибкой тягой 11, проходящей по обе стороны удлинителя 9 и охватывающей петлю 10. Концы гибкой тяги 11 связаны с дополнительными барабанами 3. 6 ил.
.г ,
. /
ipife.5
йг. Ч
Фие.6
| Промышленный робот | 1986 |
|
SU1400883A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
