Область техники, к которой относится изобретение
Изобретение относится к электротехнике, а именно к противоаварийному управлению. Изобретение может быть использовано для создания распределенной автоматической системы, выполняющей функции разгрузки элементов сети энергообъединения при их перегрузке. При этом сложная сеть энергообъединения должна быть разбита на подсистемы, оказывающие минимальное взаимное влияние. Контроль перегрузки элементов осуществляется отдельно для каждой из подсистем. Автоматика каждой подсистемы контролирует текущий режим и предотвращает перегрузку элементов путем выдачи управляющих воздействий на устройства, которые способны изменять свое продольное сопротивление, к таким устройствам, в частности, относятся устройства продольной компенсации на механических элементах и на элементах силовой электроники, а также некоторые разновидности трансформаторов.
Уровень техники
Известно большое количество способов локальной разгрузки элементов сети энергообъединения путем ограничения перетока мощности: [Россия. Патент на изобретение № RU 2023337, кл. H02J 3/06, 1994.]; [Россия. Патент на изобретение № RU 2011263, кл. H02J 3/06, 1994.]; [Россия. Патент на изобретение № RU 2015601, кл. H02J 3/06, 1994.]; [Россия. Патент на изобретение № RU 2069437, кл. H02J 3/24, 1994.]. Данные способы используются для локального контроля перетока по одному или нескольким элементам (как правило, включенным параллельно) без учета влияния изменения перетока на другие связи энергообъединения. Такой локальный подход оправдан при управлении загрузкой связей, входящих в одно сечение, либо связей, изменение перетока мощности по которым не окажет существенного влияния на загрузку других элементов системы. Однако для систем со сложной структурой, в которых нельзя четко определить отправную и приемную части, способы локального контроля перетока мощности могут привести к недопустимой перегрузке других элементов сети.
Известны также способы централизованного контроля перетоков мощности [«Методические указания по устойчивости энергосистем», Утверждены Приказом Минэнерго России от 30.06.2003 №277.]. В настоящее время при выполнении централизованного противоаварийного управления (ПАУ) энергообъединение разбивают на районы ПАУ. При этом нормируются перетоки по сечениям и частичным сечениям с учетом необходимых запасов. Обычно границы районов ПАУ определяются как технологическими особенностями районов, так и возможностями организации надежной и быстрой телепередачи необходимой информации о схемах и режимах контролируемой сети. Различные аварийные ситуации приводят к набросам мощности на линии сечения, и с целью предотвращения нарушения устойчивости по этим сечениям противоаварийная автоматика производит разгрузку путем отключения нагрузки или путем изменения генерации отправной или приемной частей. Выбор уставок противоаварийной автоматики осуществляется с учетом тяжести возмущения, текущих режимов и схем района ПАУ, в котором возник небаланс мощности. Описанный подход в настоящее время успешно применяется при реализации ПАУ ОЭС России. Однако рост электропотребления и последующее сетевое строительство, а также сопутствующая реструктуризация электроэнергетики и переход к рынку оказывают существенное влияние на процесс функционирования энергосистемы. Дальнейшее усложнение структуры сети крупных энергорайонов, вероятнее всего, приведет к необходимости создания в данных районах единой централизованной системы ПАУ, которая будет контролировать не перетоки по отдельным сечениям, а работу всего энергорайона как единого объекта управления. Но даже при возможности использования существующей идеологии ПАУ применительно к управлению крупными энергорайонами со сложной структурой, алгоритмы централизованного комплекса претерпят существенные изменения, связанные с необходимостью учета взаимного влияния перетоков по различным сечениям. К основным недостаткам крупных централизованных комплексов ПАУ следует отнести относительно медленную скорость адаптации к резкому изменению режима, что связанно с необходимостью сбора большого объема информации о текущем состоянии системы. Кроме того, централизованные комплексы ПАУ не учитывают возможность возникновения маловероятных событий, а как показала практика, именно маловероятные наложения отказов являются причиной возникновения крупных системных аварий. Вышеизложенные рассуждения не призывают к отказу от существующей системы централизованного ПАУ, эффективность которой была проверена временем. Предлагаемый способ автоматического распределенного управления призван повысить интеллектуальный уровень быстродействующих устройств локальной автоматики, контролирующей загрузку внутрисистемных связей. Локальные же устройства ПАУ всегда работали совместно с централизованными комплексами ПАУ. Таким образом, внедрение предлагаемого способа приведет к повышению уровня надежности системы ПАУ в целом. Кроме того, в настоящее время при перегрузке связи в качестве основных управляющих воздействий (УВ) в комплексах централизованных и локальных систем ПАУ рассматриваются отключения нагрузки или увеличение, либо снижение генерации. Данные УВ, безусловно, являются крайне эффективными с точки зрения ПАУ, однако с экономической точки зрения отключение нагрузки является нецелесообразным, а иногда и неосуществимым при условии необходимости обеспечения надежного электроснабжения потребителя. Быстрое введение в работу маневренных электрических станций (ГЭС, ГТУ) также требует времени, а в случае отсутствия таковых данное противоаварийное мероприятие вообще неосуществимо. Кроме того, резкая разгрузка сечения приводит к появлению значительного небаланса. Данный небаланс может привести к перегрузке связей и сечений, не входящих в район ПАУ, и даже нарушению их устойчивости, данная проблема особенно актуальна для энергорайонов со сложной структурой. В свою очередь, предлагаемый способ распределенного управления производит перераспределение перетоков мощности по внутрисистемным связям без отключения нагрузки или генерации, при этом оказывается минимальное воздействие на перетоки мощности по связям, не входящим в рассматриваемый район ПАУ. Стоит отметить, что предлагаемый способ не позволит отказаться от УВ в виде отключения нагрузки или изменения генерации, а лишь позволит снизить объем данных УВ.
В качестве способа-прототипа можно привести [Авторское свидетельство СССР №SU 1785063, кл. H02J 3/24, 1992.]. Данное авторское свидетельство описывает способ уменьшения ущерба от отключения нагрузки в энергосистеме с цепочечной структурой. Авторы уделяют большое внимание вопросам взаимного влияния подсистем и уменьшения ущерба от отключения нагрузки. В качестве недостатков данного способа можно указать на возможность его применения лишь для энергосистем с цепочечной структурой, кроме того, в качестве УВ авторами предлагается лишь отключение нагрузки.
Новый же способ применим для энергосистем со сложной структурой, он способен быстро адаптироваться к изменяющимся условиям работы энергосистемы, что позволяет адекватно реагировать на непредвиденные аварийные ситуации. Он также обладает более высокой скоростью работы, по сравнению с централизованными комплексами ПАУ, так как использует для своей работы лишь локальную информацию о состоянии режима. Кроме того, использование локальной информации для управления загрузкой элементов сети позволит повысить надежность системы ПАУ, так как при выходе из строя каналов связи, передающих информацию в централизованный комплекс ПАУ, автоматика, основанная на предложенном способе, останется в работе. Кроме того, предлагаемый способ в качестве УВ не предусматривает отключения нагрузки или перераспределение генерации, что в свою очередь позволит минимизировать объем отключаемой нагрузки или объем перераспределяемой генерации, выполняемый в дальнейшем централизованными комплексами ПАУ.
Раскрытие изобретения
Предлагаемый способ направлен на решение задачи распределенного контроля загрузки элементов сети сложного энергообъединения. Основным техническим результатом предлагаемого способа является перераспределение перетоков мощности в сложном энергообъединении с целью снижения загрузки перегруженных элементов. Перераспределение перетоков мощности выполняется путем воздействия на устройства, обладающие способностью изменять свое продольное электрическое сопротивление.
Сущность изобретения раскрыта на примере энергосистемы, схема которой приведена на фиг.1. Перетоки мощности по межсистемному сечению 1 могут контролироваться с использованием известных способов, в том числе и при помощи способа-прототипа [Авторское свидетельство СССР № SU 1785063, кл. H02J 3/24, 1992.]. Однако с помощью известных методов сложно осуществить контроль загрузки элементов внутри подсистемы 2 и подсистемы 3. В данном конкретном случае предлагаемый способ может быть направлен на решение задачи контроля загрузки элементов в подсистеме 2 и подсистеме 3. Условия осуществления способа включают следующий предварительный набор действий.
1. Сложная система должна быть разбита на совокупность контролируемых и неконтролируемых подсистем, оказывающих минимальное взаимное влияние. Подсистемы выделяются таким образом, чтобы внешнее взаимное сопротивление между граничными узлами подсистемы было существенно выше их внутреннего взаимного сопротивления. В частности, для примера, приведенного на фиг.1, внешнее взаимное сопротивление между узлами 4 и 6, а также между узлами 5 и 7 должно быть существенно выше их внутреннего взаимного сопротивления. Каждая из контролируемых подсистем должна содержать как минимум одно устройство с возможностью регулирования продольного электрического сопротивления. В частности, для примера, приведенного на фиг.1, обе подсистемы (подсистема 2 и подсистема 3) являются контролируемыми, так как обе содержат устройства с возможностью регулирования продольного электрического сопротивления. На фиг.1 и фиг.2 устройства с возможностью регулирования продольного электрического сопротивления обозначены цифрой 8.
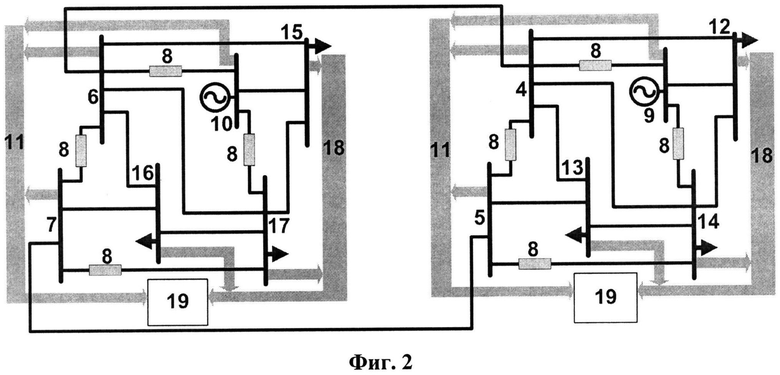
2. Внутри каждой контролируемой подсистемы должна быть организована информационная система, структурная схема которой приведена на фиг.2. Информационная система обеспечивает следующий набор измерений, получаемых непрерывно с определенным интервалом дискретизации:
а. Синхронизированные измерения тока с граничных узлов (4, 5, 6, 7), а также с основных генераторных узлов (9, 10). В качестве средства синхронизированного измерения предполагается использовать устройства, синхронизированные сигналами глобальной системы позиционирования (GPS). Синхронизированные измерения могут передаваться в локальный комплекс противоаварийного управления (ПАУ) по каналам связи для WAMS (Wide Area Measurement Systems), 11.
b. Несинхронизированные измерения активной и реактивной мощности узлов нагрузки внутри подсистемы (12, 13, 14, 15, 16, 17). Несинхронизированные измерения активной и реактивной мощности узлов нагрузки могут передаваться в локальный комплекс ПАУ по каналам телемеханики, 18.
с. Несинхронизированные дискретные сигналы о состоянии топологии сети. В качестве датчиков, фиксирующих состояние топологии сети, могут использоваться общеизвестные устройства фиксации отключения элементов, например устройство фиксации отключения линии (ФОЛ) или фиксации отключения трансформатора (ФОТ). Несинхронизированные дискретные сигналы о состоянии топологии сети могут передаваться в локальный комплекс ПАУ по каналам телемеханики, 18.
3. Внутри каждой контролируемой подсистемы должен быть организован локальный комплекс ПАУ, 19, контролирующий перетоки по связям подсистемы. Предполагается, что локальный комплекс ПАУ содержит информацию о параметрах схем замещения элементов подсистемы. Данный комплекс должен использовать предлагаемый способ ПАУ.
Предлагаемый способ ПАУ включает в себя следующую совокупность действий (пунктов), выполняемых циклически:
1. Получение синхронизированной и несинхронизированной информации о текущем состоянии подсистемы.
2. Построение упрощенной линейной модели текущего режима подсистемы. При этом нагрузка задается шунтом. Параметры шунта вычисляются по следующей формуле:
где 
РНАГР и QНАГР - текущие параметры активной и реактивной мощности узла нагрузки;
UНОМ - номинальное напряжение узла нагрузки.
Граничные узлы подсистем и основные узлы генерации внутри подсистем задаются источниками тока. В предлагаемом способе линейная модель текущего режима энергосистемы описывается следующим матричным уравнением:
I=Y·U0
где I - вектор задающих токов в узлах;
Y - матрица собственных и взаимных проводимостей, в которую также включены шунты нагрузки;
U0 - вектор напряжений узлов.
3. Оценка состояния текущего режима подсистемы. В случае отсутствия перегрузки элементов подсистемы выполняется переход к пункту 1, в случае наличия перегрузки элементов подсистемы запускается процедура разгрузки, включающая следующую последовательность действий.
4. Если в предыдущем цикле работы автоматика осуществила управляющие воздействия, однако изменение перетоков по всем сильнозагруженным связям оказалось ниже некоторой величины уставки ε, то автоматика выдает сигнал о невозможности дальнейшей разгрузки элементов сети и прекращает свою работу, дальнейшие противоаварийные воздействия могут включать лишь отключение нагрузки и перераспределение генерации внутри подсистемы, что не является задачей рассматриваемого способа. В противном случае выполняется следующая последовательность действий.
5. Для каждого устройства, способного контролировать продольное сопротивление, получают столбец коэффициентов влияния изменения его сопротивления на перетоки по связям подсистемы. Например, коэффициент влияния n-го устройства контроля продольного сопротивления на переток по i-му элементу может быть рассчитан по формуле:
где αin - коэффициент взаимного влияния;


Δxn - величина изменения сопротивления устройства, данная величина должна подбираться таким образом, чтобы модель режима оставалась вблизи зоны линеаризации, обычно Δxn составляет порядка 10% от текущего сопротивления устройства.
6. Используя столбцы коэффициентов влияния, полученные в предыдущем действии, для связей внутри подсистемы записывают следующее линеаризованное матричное уравнение изменения перетока по связям в зависимости от изменения сопротивлений устройств:
ΔP=α·ΔX
где ΔР=(ΔP1,ΔP2,…,ΔPm)T - вектор изменения перетоков во связям, здесь m - общее количество связей в подсистеме;
ΔX=(Δx1,Δx2,…,Δxk)Т - вектор изменения сопротивлений устройств.
7. Для получения управляющих воздействий решается линейная задача оптимизации, включающая следующую целевую функцию:
minΔР·λ
где ΔР=(ΔP1′,ΔP2′,…,ΔPm′) - вектор, каждый элемент которого определяется следующим выражением:
где ΔPi - i-й элемент вектора изменения перетока по связям;

λ=(λ1,λ2,…,λk)T - вектор загрузки линий, каждый элемент которого определяется некоторой весовой функцией g(Si,Smaxi), здесь Si - модуль перетока по связи в текущем режиме, Smaxi - максимальная величина перетока по связи. Функция g(Si,Smaxi) должна удовлетворять следующему условию - чем больше величина отношения |Si/Smaxi|, тем больше значение функции g(Si,Smaxi).
На рассматриваемую задачу оптимизации накладываются линейные ограничения, учитывающие диапазон возможных изменений величин сопротивлений устройств. Данные ограничения записываются для каждого устройства в виде:
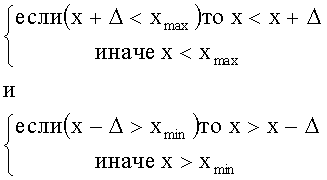
где х - текущее сопротивление устройства;
Δ - возможный диапазон изменения сопротивления устройства, данный диапазон должен выбираться таким образом, чтобы уравнения установившегося режима оставались в зоне линеаризации, обычно данный диапазон составляет порядка 10% от текущей величины сопротивления устройства;
xmin и xmax - минимальная и максимальная величины сопротивления устройства.
Таким образом, рассматриваемая целевая функция стремится снизить переток по сильнозагруженным элементам сети, что с технической точки зрения возможно лишь за счет увеличения перетока по слабозагруженным элементам сети.
8. Сопротивления устройств, способных контролировать продольное сопротивление, корректируются в соответствии с управляющими воздействиями, полученными при выполнении процедуры оптимизации на предыдущем шаге.
Сопоставительный анализ предлагаемого способа с известными не выявил способов, содержащих признаки, идентичные или эквивалентные отличительным признакам предлагаемого способа. Поэтому можно сделать вывод о соответствии заявляемого решения критерию «существенные отличия».
Краткое описание чертежей
Фигура 1. На фигуре приведена схема энергосистемы, на примере которой раскрывается суть предлагаемого способа.
Фигура 2. На фигуре приведена схема энергосистемы со схематическим изображением информационной структуры, обеспечивающей объем измерений, необходимых для реализации описываемого способа.
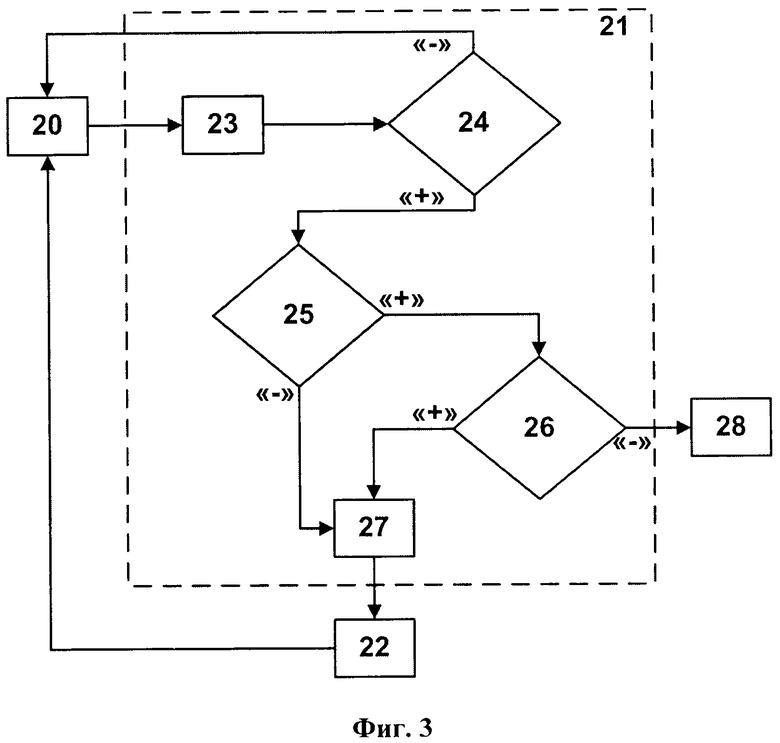
Фигура 3. На фигуре приведена блок-схема устройства, с помощью которого можно осуществить описываемый способ.
Осуществление изобретения
Реализация способа возможна с помощью устройства, блок-схема которого приведена на фиг.3. Данное схематическое изображение отражает особенности выполнения локального устройства противоаварийного управления (ПАУ) контролируемой подсистемы. Устройство ПАУ состоит из блока сбора измерений 20, программного комплекса 21 и блока выдачи управляющих воздействий 22. Устройство ПАУ работает дискретно. На каждом шаге работы устройства ПАУ в блок сбора измерений 20 поступает набор синхронизированных и несинхронизированных измерений, характеризующих текущее состояние подсистемы. В набор синхронизированных измерений входят сигналы от устройств, синхронизированных сигналами глобальной системы позиционирования (GPS). В набор несинхронизированных измерений входят несинхронизированные измерения активной и реактивной мощности узлов нагрузки внутри подсистемы, а также несинхронизированные дискретные сигналы о состоянии топологии сети. Блок сбора измерений передает полученный набор измерений в программный комплекс 21. Программный комплекс 21 может быть реализован на базе любого универсального вычислительного устройства. Поступившие в программный комплекс измерения обрабатываются в блоке 23.
Блок 23 осуществляет построение линейной модели текущего режима и оценивает загрузку элементов подсистемы. Далее в блоке 24 проверяется следующее логическое условие - если в подсистеме имеется хотя бы один перегруженный элемент, запускается процедура формирования управляющих воздействий (переход в блок 25), в противном случае выполняется циклический переход в блок сбора измерений 20 и при поступлении нового набора измерений вновь повторяется цикл проверки наличия перегруженных элементов в подсистеме.
Внутри блока 25 проверяется условие реализации управляющих воздействий в предыдущем цикле работы автоматики. Если в предыдущем цикле работы автоматики осуществлялась реализация управляющих воздействий, то управление передается в блок 26, в противном случае управление передается в блок 27. В блоке 26 проверяется условие эффективности реализации управляющих воздействий на предыдущем шаге работы автоматики. Если реализация управляющих воздействий на предыдущем шаге работы автоматики была эффективна, то управление передается в блок 27, в противном случае, на внешнее устройство (блок 28) выдается сигнал о завершении работы автоматики.
В блоке 27 осуществляется формирование матрицы коэффициентов взаимного влияния, выполняется процедура оптимизации и производится выработка оптимальных управляющих воздействий. Полученные в результате расчетов управляющие воздействия передаются в блок 22 - блок выдачи управляющих воздействий, который осуществляет передачу команд управления устройствам контроля продольного сопротивления. После выдачи управляющих воздействий производится переход к блоку 20, и весь цикл работы системы ПАУ повторяется вновь.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического распределения отключения нагрузки | 2020 |
|
RU2730692C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РАСПРЕДЕЛЕННОГО ОТКЛЮЧЕНИЯ НАГРУЗКИ ДЛЯ ЦЕЛЕЙ СНИЖЕНИЯ ПЕРЕТОКОВ АКТИВНОЙ МОЩНОСТИ ПО ЭЛЕМЕНТАМ ЭНЕРГОСИСТЕМЫ ПРИ ИХ ПЕРЕГРУЗКЕ | 2010 |
|
RU2476969C2 |
| Способ автоматического определения крутизны частотной характеристики изолированно работающего энергообъединения | 2020 |
|
RU2722642C1 |
| Способ интеллектуального управления нагрузкой в изолированных энергосистемах в аварийных режимах и устройство для его осуществления | 2022 |
|
RU2812195C1 |
| Способ координированного противоаварийного управления энергосистемой при небалансах мощности | 1990 |
|
SU1785063A1 |
| Способ интеллектуального управления напряжением и реактивной мощностью энергосистемы | 2022 |
|
RU2793231C1 |
| Система автоматического противоаварийного управления нагрузкой в изолированно работающей энергетической системе | 2020 |
|
RU2723544C1 |
| Способ противоаварийного управления энергосистемой | 1989 |
|
SU1721707A1 |
| Способ противоаварийного управления режимом параллельной работы синхронных генераторов и делительной автоматики в электрических сетях | 2018 |
|
RU2692054C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ЛАВИНЫ НАПРЯЖЕНИЯ В ЭНЕРГОСИСТЕМЕ | 2012 |
|
RU2508590C1 |
Изобретение относится к электротехнике, а именно к противоаварийному управлению. Технический результат заключается в решении задач распределенного контроля загрузки элементов сети сложного энергообъединения, основным для предлагаемого способа является перераспределение перетоков мощности в сложном энергообъединении с целью снижения загрузки перегруженных элементов. Для этого в заявленном способе, включающем учет взаимного влияния перетоков мощности по элементам сети путем воздействия на электрические устройства, обладающих способностью изменять свое продольное сопротивление, сложную систему разбивают на совокупность контролируемых и неконтролируемых подсистем, оказывающих минимальное взаимное влияние, при этом контроль перегрузки элементов осуществляется циклически отдельно для каждой из подсистем, автоматика каждой подсистемы контролирует текущий режим, в случае возникновения перегрузки выполняется расчет управляющих воздействий путем решения линейной задачи оптимизации, перегрузка элементов сети предотвращается путем выдачи данных управляющих воздействий на устройства, которые способны изменять свое продольное сопротивление. 3 ил.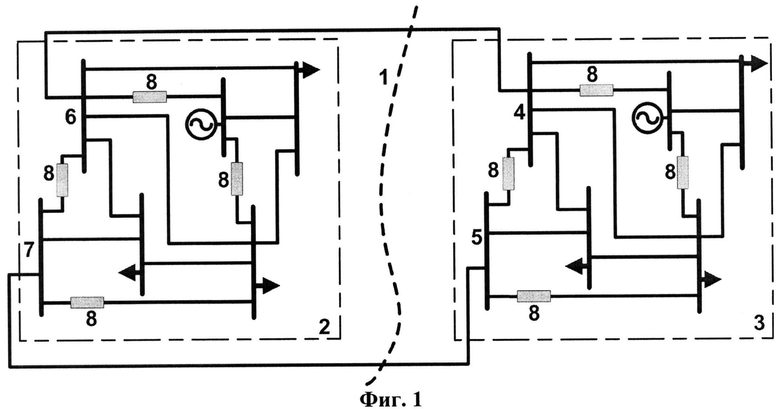
Способ автоматического контроля загрузки элементов сети энергообъединения, включающий учет взаимного влияния перетоков мощности по элементам сети, отличающийся тем, что данный способ может быть использован для распределенного контроля загрузки элементов в сетях со сложной структурой, кроме того, предлагаемый способ в качестве управляющих воздействий использует изменение характеристик электрических устройств, способных регулировать свое продольное сопротивление, тем самым достигается перераспределение перетоков мощности и минимизируется объем необходимого отключения нагрузки и изменения генерации; предлагаемый способ включает выполнение следующего набора действий: сложную систему разбивают на совокупность контролируемых и неконтролируемых подсистем, оказывающих минимальное взаимное влияние, для каждой контролируемой подсистемы обеспечивают набор синхронизированных измерений тока с граничных узлов и с основных генераторных узлов подсистемы, а также набор несинхронизированных измерений активной и реактивной мощности узлов нагрузки и дискретных сигналов о состоянии топологии сети; внутри каждой подсистемы организуют локальный комплекс противоаварийного управления (ПАУ), контролирующий перетоки мощности по связям подсистемы; далее циклически выполняют следующую совокупность действий: получают информацию о текущем состоянии подсистемы, исходя из полученной информации, строят упрощенную линейную модель текущего режима подсистемы, при этом нагрузку задают шунтом, параметры которого вычисляют по формуле 



и

(где х - текущее сопротивление устройства; Δ - возможный диапазон изменения сопротивления устройства, данный диапазон выбирают таким образом, чтобы уравнения установившегося режима оставались в зоне линеаризации; xmin и xmax - минимальная и максимальная величины сопротивления устройства); затем сопротивления устройств, способных контролировать продольное сопротивление, корректируют в соответствии с управляющими воздействиями, полученными при выполнении процедуры оптимизации; далее вновь выполняется весь цикл работы автоматики, начиная с момента получения информации о текущем состоянии режима подсистемы.
| Способ координированного противоаварийного управления энергосистемой при небалансах мощности | 1990 |
|
SU1785063A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ И АДАПТИВНОГО УПРАВЛЕНИЯ РАСПРЕДЕЛЕННОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312389C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ МОЩНОСТИ В ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2006 |
|
RU2393608C2 |
| Устройство для программного контроля электронных устройств | 1979 |
|
SU868775A1 |
| Устройство фиксации перегрузки электропередачи с промежуточной электростанцией | 1984 |
|
SU1211831A1 |
| JP 4357511 A, 09.11.1992 | |||

