Изобретение относится к области транспортирования, а именно к беспилотным летательным аппаратам вертикального взлета с кольцевым крылом.
Из уровня техники известны беспилотные летательные аппараты (БПЛА) различных схем. Кроме аппаратов традиционных схем (самолетная, вертолетная), существуют так называемые аппараты вертикального взлета и посадки с вентилятором в канале (Ducted Fan VTOL UAV) в качестве несущей системы. Характерными аналогами являются аппараты iSTAR фирмы Allied Aerospace, T-Hawk фирмы Honeywell, IAV фирмы BAE Systems Inc.
Наиболее близким по технической сущности к заявленному изобретению является беспилотный летательный аппарат, состоящий из кольцевого крыла, вентилятора-движителя, центрального тела и, по меньшей мере, четырех независимых аэродинамических рулей (см. патент EP 2193994, кл. B64C 39/02, опубл. 09.06.2010).
Общими недостатками известных устройств являются невысокий КПД, недостаточная мощность, плохая управляемость и малая аэродинамическая стабильность БПЛА.
Задачей изобретения является устранение указанных недостатков. Технический результат заключается в улучшении аэродинамических характеристик БПЛА и, как следствие, в повышении эффективности его работы. Поставленная задача решается, а технический результат достигается тем, что в беспилотном летательном аппарате, состоящем из кольцевого крыла, вентилятора-движителя, центрального тела и, по меньшей мере, четырех независимых аэродинамических рулей, внутренняя поверхность кольцевого крыла включает цилиндрический участок диаметром Dвд и длиной Lцил=(0.45÷0.55)Dвд, хорда кольцевого крыла составляет bкк=(1.1÷1.25)Dвд, максимальная толщина профиля кольцевого крыла составляет hmax=(0.145÷0.18)Dвд, a расстояние от крайней передней точки кольцевого крыла до начала цилиндрического участка составляет Lнос=(0.145÷0.165)hmax, при этом внутри цилиндрического участка расположен вентилятор-движитель, состоящий из входного направляющего аппарата, рабочего колеса и спрямляющего аппарата, входной направляющий аппарат состоит из радиальных аэродинамических элементов, соединяющих кольцевое крыло и центральное тело и имеющих симметричный профиль с хордой постоянной величины, рабочее колесо выполнено таким образом, что средняя линия профилей его лопаток изогнута по дуге окружности, величина хорды bрк описывается линейной функцией от радиуса, угол установки профилей θрк описывается кубической функцией от радиуса, величина прогиба fрк описывается полиномом пятой степени от радиуса, величина толщины профиля cрк описывается линейной функцией от радиуса, а спрямляющий аппарат выполнен таким образом, что средняя линия профилей его лопаток изогнута по дуге окружности, величины хорды bса и толщины cса профиля постоянны, угол установки профилей θса описывается кубической функцией от радиуса, а величина прогиба fрк описывается полиномом пятой степени от радиуса. Центральное тело предпочтительно выполнено цилиндрическим с диаметром Dцп=0.35Dвд, а его длина составляет Lцт=(1.75÷1.95)Dвд. Расстояние от начала цилиндрического участка кольцевого крыла до точки максимальной толщины профиля предпочтительно составляет Lhmax=(0.18÷0.23)hmax. Высота от крайней передней точки кольцевого крыла до цилиндрического участка предпочтительно составляет hнос=(0.65÷0.8)hmax. Диаметр кольцевого крыла на выходе предпочтительно составляет Dвых=(1.05÷1.19)Dвд. Отношение числа радиальных аэродинамических элементов входного направляющего аппарата nвна к числу лопаток рабочего колеса nрк предпочтительно составляет 7/5.
На фиг.1 представлен общий вид предлагаемого БПЛА;
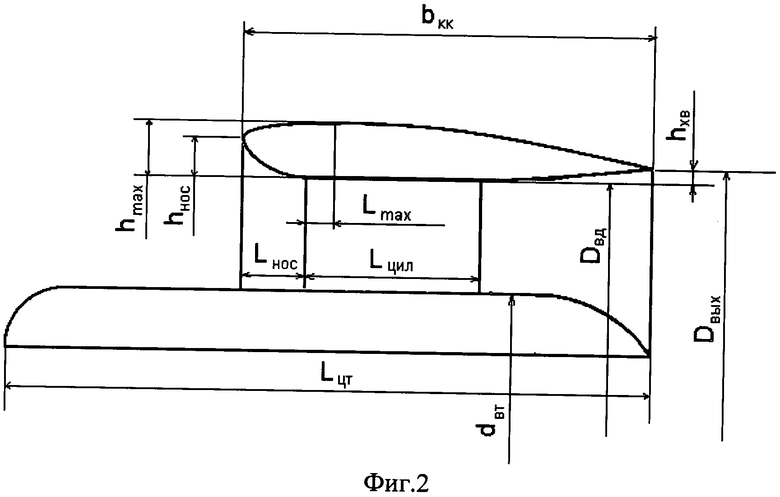
на фиг.2 - поперечное сечение кольцевого крыла и центрального тела с характерными размерами;
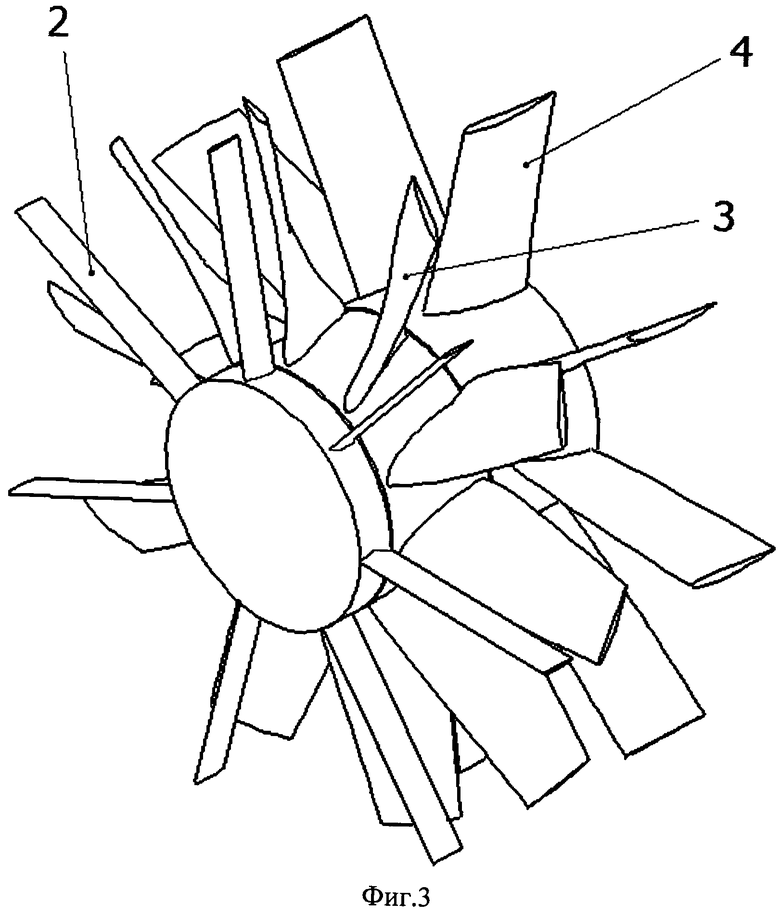
на фиг.3 - общий вид вентилятора-движителя;
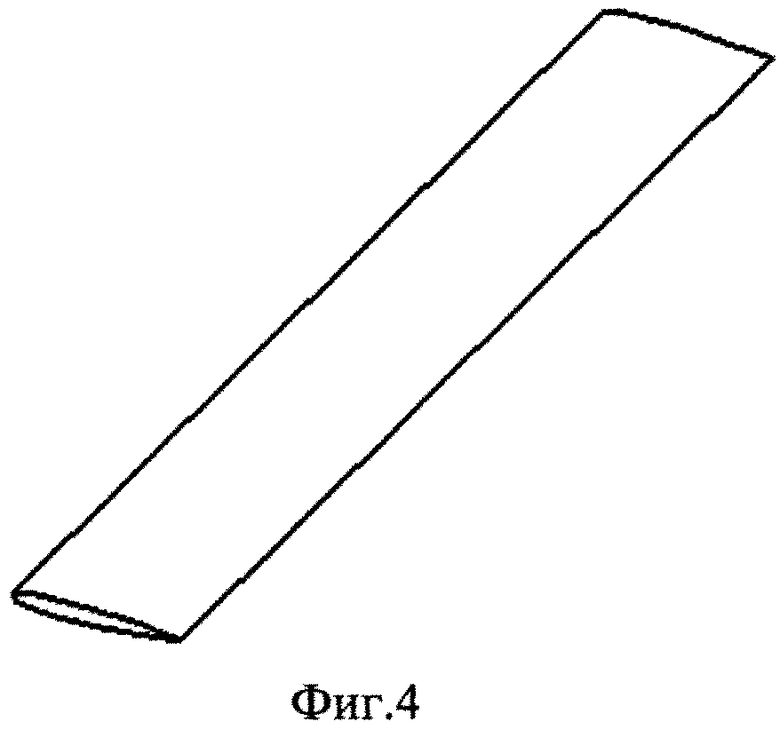
на фиг.4 - общий вид радиальных аэродинамических элементов входного направляющего аппарата;
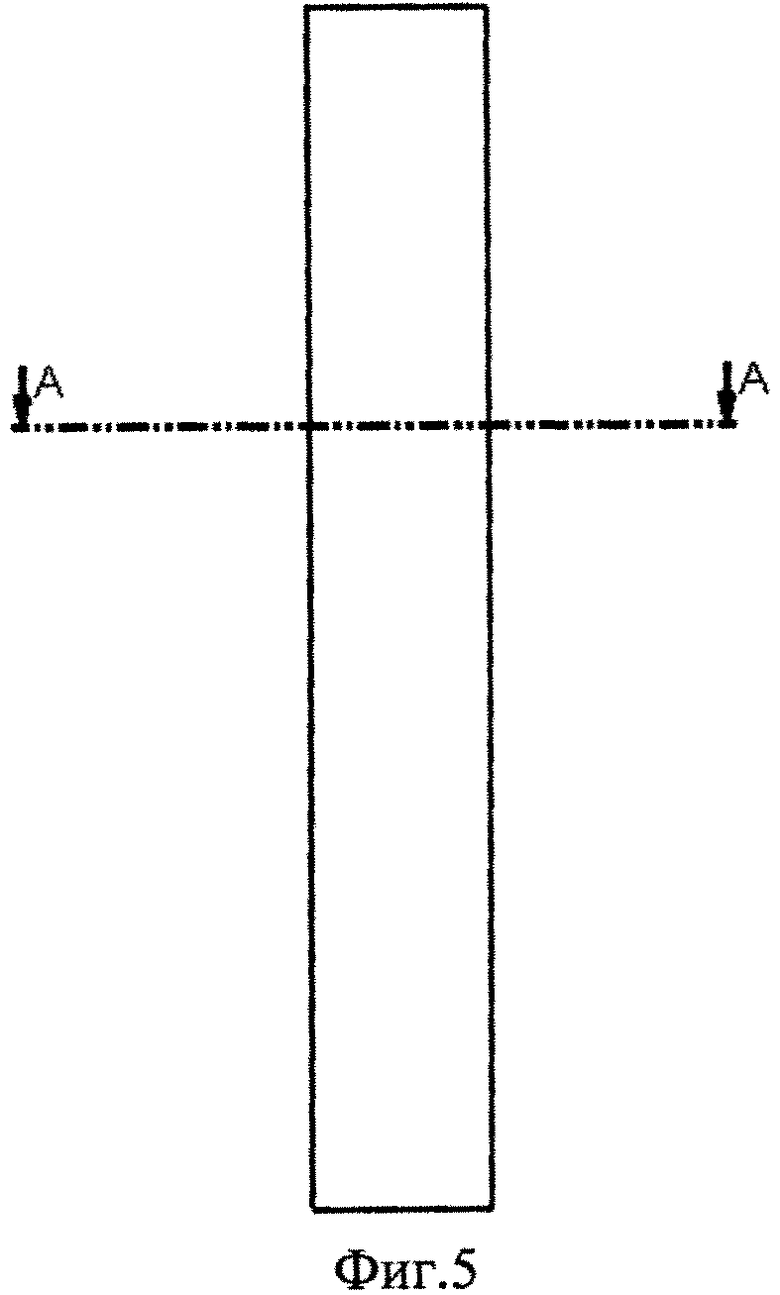
на фиг.5 - то же, что на фиг.4, вид сбоку;
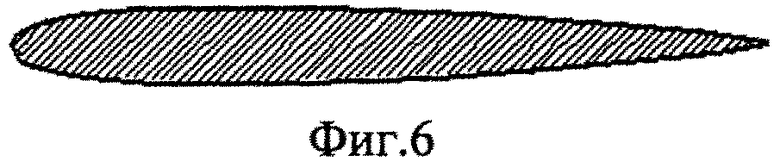
на фиг.6 - сечение А-А по фиг.5;
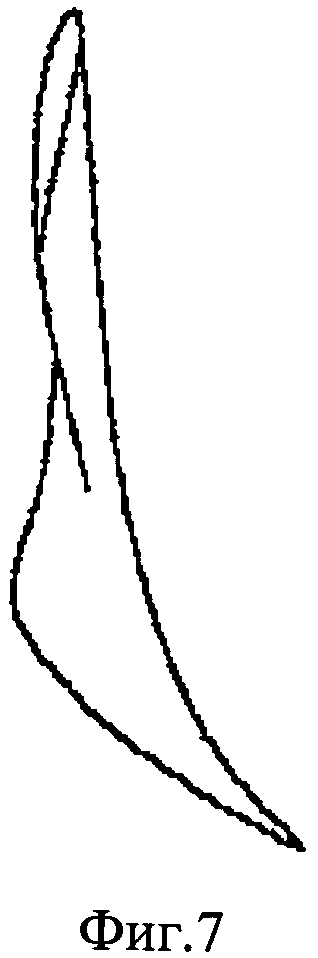
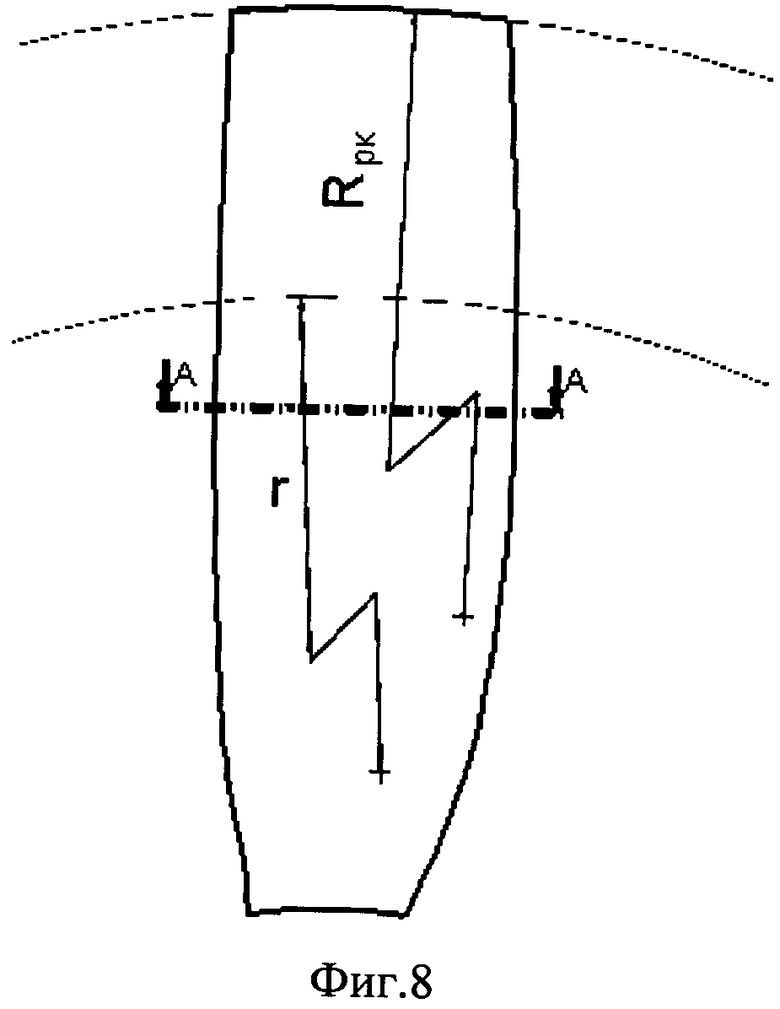
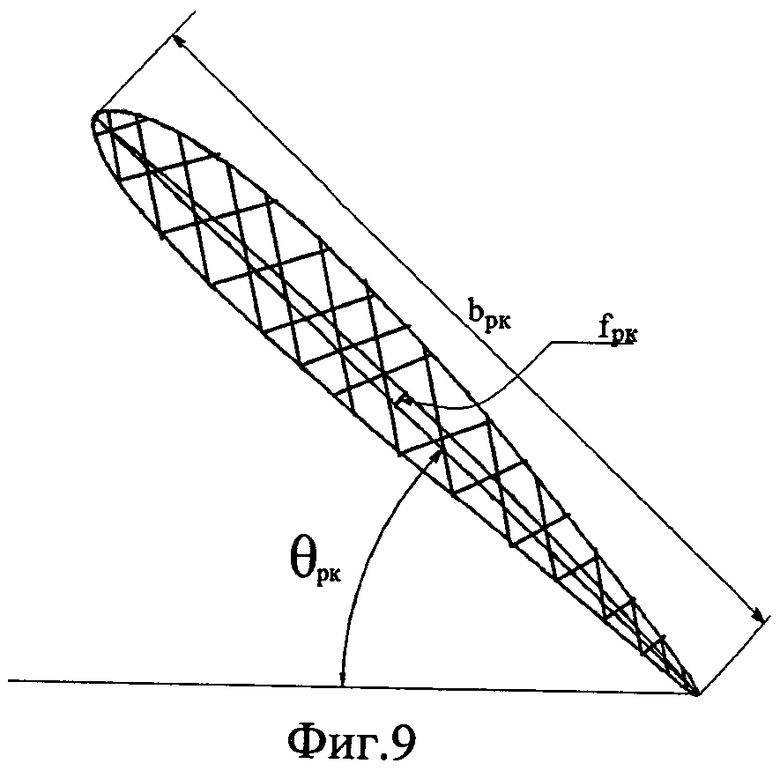
на фиг.7 - общий вид лопасти рабочего колеса;
на фиг.8 - то же, что на фиг.7, вид сбоку;
на фиг.9 - сечение А-А по фиг.8;
на фиг.10 - общий вид лопасти спрямляющего аппарата;
на фиг.11 - то же, что на фиг.10, вид сбоку;
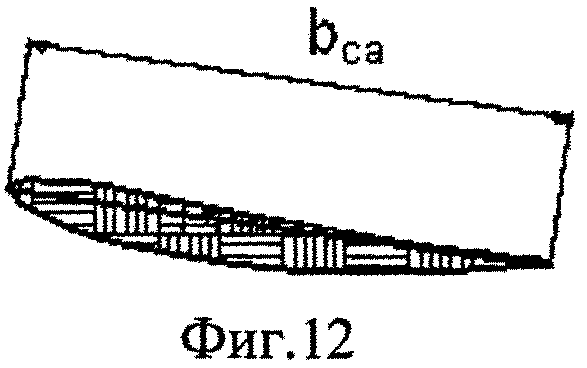
на фиг.12 - сечение А-А по фиг.11.
Предлагаемый БПЛА состоит из кольцевого крыла 1, вентилятора-движителя, в состав которого входят входной направляющий аппарат 2, рабочее колесо 3 и спрямляющий аппарат 4, центральное тело 5, в котором размещается полезная нагрузка, и четыре или более независимых аэродинамических рулей 6. Указанные элементы имеют описанную ниже оптимальную аэродинамическую компоновку.
Кольцевое крыло 1 является телом вращения с несимметричным профилем, содержащим цилиндрический участок, в котором расположен вентилятор-двигатель. Относительная длина этого участка составляет
где Lцил - размерная длина цилиндрического участка, а
Dвд - внешний диаметр вентилятора-движителя или диаметр цилиндрического участка крыла 1.
Центральное тело 5 выполнено цилиндрическим с диаметром Dцт=0.35Dвд. Его относительная длина составляет
где Lцт - размерная длина центрального тела.
Геометрия кольцевого крыла 1 представлена на фиг.2.
Диаметр кольцевого крыла на выходе предпочтительно составляет Dвых=(1.05÷1.19)Dвд.
Безразмерная хорда кольцевого крыла составляет
где bкк - размерная хорда кольцевого крыла.
Безразмерная максимальная толщина профиля кольцевого крыла составляет
где hmax - размерная максимальная толщина профиля кольцевого крыла.
Безразмерное расстояние от крайней передней точки кольцевого крыла до начала цилиндрического участка составляет
где Lнос - размерное расстояние от крайней передней точки кольцевого крыла.
Безразмерная высота от крайней передней точки кольцевого крыла до цилиндрического участка составляет
где hнос - размерная высота от крайней передней точки кольцевого крыла.
Безразмерное расстояние от начала цилиндрического участка до точки максимальной толщины профиля составляет
где Lhmax - размерное расстояние до точки максимальной толщины. Безразмерный диаметр кольцевого крыла на выходе составляет
где Dвых - размерный диаметр кольцевого крыла на выходе.
Геометрия вентилятора-движителя представлена на фиг.3. Отношение числа радиальных аэродинамических элементов входного направляющего аппарата nвна к числу лопаток рабочего колеса nрк составляет 7/5.
Входной направляющий аппарат 2 состоит из радиальных аэродинамических элементов, выполняющих роль распорок и соединяющих кольцевое крыло 1 и центральное тело 5. Указанные элементы (см. фиг.4-6) имеют симметричный профиль с хордой постоянной величины, что позволяет выравнивать поток перед рабочим колесом 3 на различных режимах полета и приводит к увеличению тяги вентилятора-движителя.
В рабочем колесе 3 (фиг.7-9) профили лопастей имеют среднюю линию, изогнутую по дуге окружности. Распределение величины хорды 
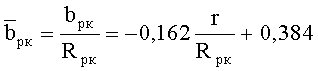
где r - текущий радиус рабочего колеса,
Rрк - внешний радиус рабочего колеса.
Зависимость угла установки профилей θрк от радиуса описывается кубической функцией

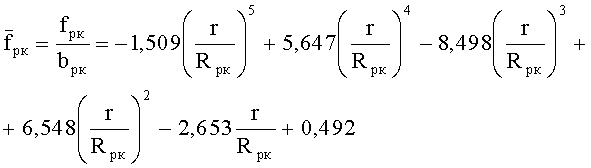
Зависимость величины прогиба 
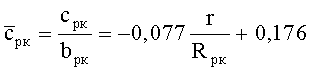
Зависимость толщины профиля 
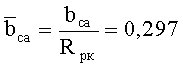
В спрямляющем аппарате 4 (фиг.10-12) для его лопастей величина хорды 

Зависимость величины угла установки профилей θса от радиуса описывается кубической функцией

Зависимость величина прогиба 
Экспериментально было показано, что такие геометрические параметры вентилятора-движителя обеспечивают создание необходимой тяги. Для того чтобы транспортировать необходимый вес полезной нагрузки, БПЛА может быть соответствующим образом промасштабирован с сохранением вышеприведенных соотношений, при этом изменится мощность, потребляемая вентилятором-движителем, и потребное число оборотов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕГКОНАГРУЖЕННЫЙ ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ | 2013 |
|
RU2537351C2 |
| АЭРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 2012 |
|
RU2515949C2 |
| Крыло летательного аппарата | 2018 |
|
RU2688639C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ | 2018 |
|
RU2668766C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ, БЛОК ВИДЕОАППАРАТУРЫ ДЛЯ НЕГО И КАТАПУЛЬТА (ВАРИАНТЫ) ДЛЯ ЕГО ЗАПУСКА | 2010 |
|
RU2466909C2 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДОВ И ДВИЖИТЕЛЕЙ ДЕЙСТВУЮЩИХ МОДЕЛЕЙ БПЛА | 2014 |
|
RU2594048C2 |
| ПРОФИЛИРОВАННАЯ КОНСТРУКЦИЯ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА ИЛИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2019 |
|
RU2789369C2 |
| ОСЕВОЙ ВЕНТИЛЯТОР | 1994 |
|
RU2113627C1 |
| СПОСОБ СОЗДАНИЯ СИСТЕМЫ СИЛ ЛЕТАТЕЛЬНОГО АППАРАТА САМОЛЕТНОЙ СХЕМЫ И НАЗЕМНО-ВОЗДУШНАЯ АМФИБИЯ (НВА) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2127202C1 |
| УНИВЕРСАЛЬНЫЙ ПОЛИПЛАН | 1992 |
|
RU2025295C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов вертикального взлета. Беспилотный летательный аппарат состоит из кольцевого крыла, вентилятора-движителя, центрального тела и, по меньшей мере, четырех независимых аэродинамических рулей. Внутренняя поверхность кольцевого крыла включает цилиндрический участок диаметром Dвд и длиной Lцил=(0.45÷0.55)Dвд, хорда кольцевого крыла составляет bкк=(1.1÷1.25)Dвд, максимальная толщина профиля кольцевого крыла составляет hmax=(0.145÷0.18)Dвд, а расстояние от крайней передней точки кольцевого крыла до начала цилиндрического участка составляет Lнос=(0.145÷0.165)hmax. Внутри цилиндрического участка расположен вентилятор-движитель. Вентилятор-движитель состоит из входного направляющего аппарата, рабочего колеса и спрямляющего аппарата. Входной направляющий аппарат состоит из радиальных аэродинамических элементов, которые соединяют кольцевое крыло и центральное тело. Указанные элементы имеют симметричный профиль с хордой постоянной величины. Лопатки рабочего колеса и спрямляющего аппарата имеют сложную аэродинамическую форму. Изобретение позволяет улучшить аэродинамические характеристики БПЛА и, как следствие, повысить эффективность его работы. 6 з.п. ф-лы, 12 ил.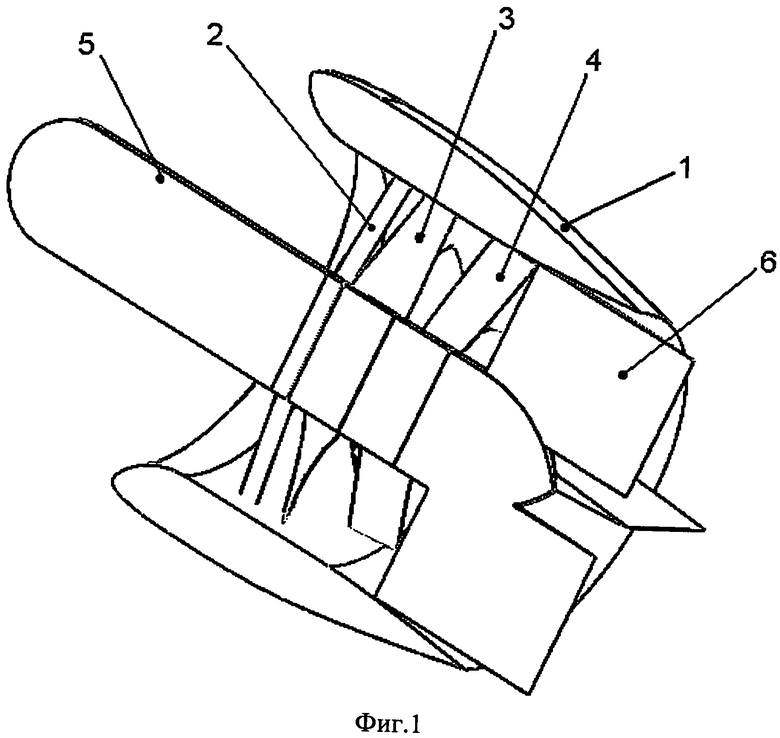
1. Беспилотный летательный аппарат, состоящий из кольцевого крыла, вентилятора-движителя, центрального тела и, по меньшей мере, четырех независимых аэродинамических рулей, отличающийся тем, что внутренняя поверхность кольцевого крыла включает цилиндрический участок диаметром Dвд и длиной Lцил=(0.45÷0.55)Dвд, хорда кольцевого крыла составляет bкк=1.1÷1.25Dвд, максимальная толщина профиля кольцевого крыла составляет hmax=(0.145÷0.18)Dвд, а расстояние от крайней передней точки кольцевого крыла до начала цилиндрического участка составляет Lнос=(0.145÷0.165)hmax, при этом внутри цилиндрического участка расположен вентилятор-движитель, состоящий из входного направляющего аппарата, рабочего колеса и спрямляющего аппарата, входной направляющий аппарат состоит из радиальных аэродинамических элементов, соединяющих кольцевое крыло и центральное тело и имеющих симметричный профиль с хордой постоянной величины, рабочее колесо выполнено таким образом, что средняя линия профилей его лопаток изогнута по дуге окружности, величина хорды bрк описывается линейной функцией от радиуса, угол установки профилей θрк описывается кубической функцией от радиуса, величина прогиба fрк описывается полиномом пятой степени от радиуса, величина толщины профиля cрк описывается линейной функцией от радиуса, а спрямляющий аппарат выполнен таким образом, что средняя линия профилей его лопаток изогнута по дуге окружности, величины хорды bса и толщины cса профиля постоянны, угол установки профилей θса описывается кубической функцией от радиуса, а величина прогиба fрк описывается полиномом пятой степени от радиуса.
2. Летательный аппарат по п.1, отличающийся тем, что центральное тело выполнено цилиндрическим с диаметром Dцт=0.35Dвд.
3. Летательный аппарат по п.1, отличающийся тем, что длина центрального тела составляет Lцт=(1.75÷1.95)Dвд.
4. Летательный аппарат по п.1, отличающийся тем, что расстояние от начала цилиндрического участка кольцевого крыла до точки максимальной толщины профиля составляет Lhmax=(0.18÷0.23)hmax.
5. Летательный аппарат по п.1, отличающийся тем, что высота от крайней передней точки кольцевого крыла до цилиндрического участка составляет hнос=(0.65÷0.8)hmax.
6. Летательный аппарат по п.1, отличающийся тем, что диаметр кольцевого крыла на выходе составляет Dвых=(1.05÷1.19)Dвд.
7. Летательный аппарат по п.1, отличающийся тем, что отношение числа радиальных аэродинамических элементов входного направляющего аппарата nвна к числу лопаток рабочего колеса nрк составляет 7/5.
| СТУПЕНЬ РАКЕТЫ | 2000 |
|
RU2193994C2 |
| Реверсивный электропривод постоянного тока | 1959 |
|
SU130955A1 |
| US 2011046817 A1, 24.02.2011 | |||
| СИСТЕМА ВОЗДУШНОГО НАБЛЮДЕНИЯ | 2010 |
|
RU2428355C1 |

