Изобретение относится к системам воздушного наблюдения, предназначенным для наблюдения или разведки и прицеливания с неподвижной или движущейся наземной станции, и в частности к системам, использующим беспилотный летательный аппарат (БПЛА).
Известен беспилотный авиационный комплекс фирмы «Израел Аэроспэйс Индастриз ЛТД» (заявка WO 2007/141795 Al, B64C 27/20, 13.12.2007), включающий наземную станцию и беспилотный привязной летательный аппарат в виде платформы, несущей полезную нагрузку и движитель в виде четырех вентиляторов с электроприводом. Привязь, связывающая наземную станцию с платформой беспилотного летательного аппарата, состоит из силового троса и многофункционального кабеля, обеспечивающего электрическую связь и связь управления. Воздушные винты вентиляторов обеспечивают вертикальную подъемную силу и позволяют поддерживать заданную высоту платформы на режиме висения и полета. Винты вентиляторов могут выполняться с изменяемым углом установки лопастей или снабжаться щитками регулируемого отклонения для изменения пространственного положения БПЛА.
Использование свободной привязи беспилотного летательного аппарата требует сложной системы отслеживания пространственного положения платформы и управления им. Сложность системы управления и стабилизации положения беспилотного летательного аппарата приводит к повышению веса БПЛА и снижению его надежности и обуславливает высокую стоимость элементов системы.
Известна система воздушного наблюдения (патент US 3715953, F41G 1/40, 13.02.1973), которая является наиболее близким аналогом заявляемому изобретению, включающая наземную станцию, на которой установлены выдвижная мачта, механизм ее формирования из ленты и система управления приводом вращения барабана этого механизма, а также - комплект полезной нагрузки, установленный в прозрачном контейнере на конце мачты. Контейнер содержит аппаратуру сканирования зоны наблюдения для обзорной разведки и управления огнем, размещенную на платформе, стабилизированной с помощью гиростабилизатора относительно трех осей, и включающую смонтированные на ней - телевизионную камеру, лазерный дальномер и указатель азимута. Многожильный коаксиальный кабель обеспечивает электрическую связь каждого элемента оборудования с соответствующим блоком управления.
Недостатком такой системы наблюдения является нарушение пространственной ориентации системы и снижение точности и стабильности работы приборов наведения при значительных отклонениях мачты при движении наземной станции, например по пересеченной местности или по неспокойной водной поверхности. Такое же негативное влияние на работу системы оказывает недостаточная жесткость мачты, что может приводить к отклонению ее концевого участка, например под воздействием ветровых нагрузок. Другим недостатком системы являются ограничения, накладываемые конструкцией по длине и прочности мачты при ее значительной длине, а также ограничения по весу полезного груза. Указанные недостатки и ограничения снижают эффективность работы системы наблюдения.
Задачей, которую решает заявляемое техническое решение, является увеличение высоты подъема мачты и, таким образом, увеличение площади обзора наблюдения, и повышение эффективности работы системы воздушного наблюдения за счет стабилизации пространственного положения мачты и соответственно положения установленных на мачте приборов и оборудования для наблюдения и указания цели.
Поставленная задача решена благодаря тому, что в системе воздушного наблюдения, содержащей наземную станцию и установленные на ее несущей платформе выдвижную мачту с оборудованием для сканирования зоны наблюдения, расположенным в контейнере, установленном на верхнем конце выдвижной мачты, и консоль с панелью управления выдвижением мачты и сканированием зоны наблюдения, в соответствии с изобретением - к контейнеру сверху присоединен беспилотный летательный аппарат с двумя соосно установленными воздушными винтами и их приводом, а также с автоматом перекоса каждого из воздушных винтов со своим приводом, соединенными многожильным коаксиальным кабелем с консолью с дополнительной панелью управления беспилотным летательным аппаратом.
Оборудование для сканирования зоны наблюдения установлено в контейнере на гиростабилизированной платформе, при этом датчики управления платформы связаны с панелью управления беспилотного летательного аппарата для формирования управляющих сигналов на приводы автоматов перекоса каждого из воздушных винтов.
Выдвижная мачта установлена на несущей платформе наземной станции с помощью одного шарнирного узла с возможностью поворота по двум осям, а контейнер присоединен к верхнему концу выдвижной мачты с помощью другого такого шарнирного узла.
Выдвижная мачта выполнена телескопической, с пневматическим или гидравлическим приводом.
Наземная станция может быть выполнена в виде подвижной платформы, бронетранспортера, танка или плавучего средства, имеющего энергетическую установку.
Выдвижная мачта, используемая в системе воздушного наблюдения, может быть выполнена или телескопической, с пневматическим или гидравлическим приводом, или иметь конструкцию, аналогичную с устройством ближайшего аналога (US № 3715953) или в соответствии с патентом Канады (№ 3144215, 11.08.1964), а именно в виде сворачиваемого из ленты трубчатого выдвигаемого элемента, адаптируемого к хранению. Конструкция, известная также как технология STEM (Storable Tubular Extendible Member), предполагает формирование трубчатой конструкции выдвижной мачты из нескольких полос металла, прошедших предварительную термообработку для формирования круглого сечения, при прохождении их через направляющие вальцы во время вытягивания мачты от барабана хранения и обратно, при сворачивании мачты. Технология STEM упомянута также в материалах: Extending Canada's Role in Space Exploration - National Research Council Canada, (www.nrc-cnrc.gc.ca).
Беспилотный летательный аппарат с двумя соосно установленными винтами имеет электропривод воздушных винтов и автоматы перекоса каждого из винтов с приводами управления, связанными через многожильный коаксиальный кабель с соответствующими панелями консоли управления оператора.
Установка беспилотного летательного аппарата, связанного с мачтой, позволяет увеличить высоту выдвижения мачты и аппаратуры наблюдения, снизить требования к прочности мачты, а также снять соответственные ограничения по весу указанной полезной нагрузки - за счет использования подъемной силы, создаваемой двумя соосными воздушными винтами беспилотного летательного аппарата.
Путем автоматического регулирования отклонения вектора аэродинамической подъемной силы с помощью автомата перекоса каждого из двух воздушных винтов появляется возможность дополнительной стабилизации положения выдвижной мачты и соответственно пространственного положения установленного на мачте контейнера с оборудованием для наблюдения и указания цели, что повышает эффективность работы системы. Сигналы с датчиков пространственного положения стабилизированной платформы передаются через блоки автоматического управления на автоматы перекоса воздушных винтов беспилотного летательного аппарата для создания аэродинамических моментов, действующих против сил, вызывающих отклонение верхнего конца мачты от вертикального положения, например при ветровых нагрузках.
Беспилотный летательный аппарат может также использоваться при выдвижении мачты для создания заданной (скоростью вращения винтов) силы, дополнительной к усилию, создаваемому приводом, установленным на наземной станции для работы механизма, предназначенного для выдвижения элементов мачты.
Использование на концах выдвижной мачты шарнирных узлов с возможностью поворота по двум осям обеспечивает независимость положения контейнера с оборудованием в горизонтальной плоскости при перемещениях наземной станции.
Система воздушного наблюдения поясняется чертежами, на которых изображены:
на фиг.1 - схематичное изображение наземной станции с выдвинутой мачтой с контейнером для полезной нагрузки и беспилотным летательным аппаратом;
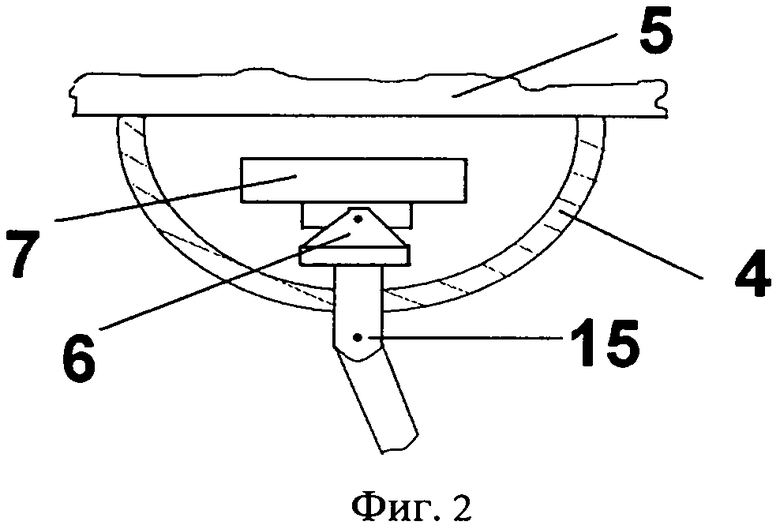
на фиг.2 - разрез контейнера;
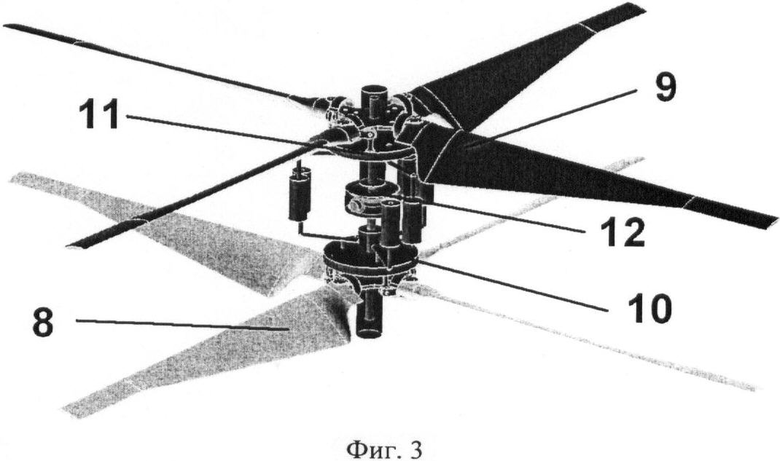
на фиг.3 - соосные воздушные винты беспилотного летательного аппарата с приводом и автоматами перекоса.
Система воздушного наблюдения состоит из неподвижной или движущейся наземной станции 1 (фиг.1), на несущей платформе которой установлены кабина 2 с панелями управления и местом оператора, и выдвижная мачта 3.
Выдвижная мачта 3 полой конструкции может быть выполнена телескопической с пневматическим или гидравлическим приводом, или в виде сворачиваемого из ленты выдвигаемого элемента. Внутри выдвижной мачты 3 расположен многофункциональный многожильный коаксиальный кабель, предназначенный для соединения приводов с блоком питания, размещенным на платформе наземной станции, а также для соединения элементов системы с панелями управления.
На конце выдвижной мачты 3 установлен контейнер 4 с оборудованием для сканирования зоны наблюдения и присоединенный к нему сверху беспилотный летательный аппарат 5. Пунктиром показана выдвижная мачта 3 с беспилотным летательным аппаратом 5 в походном положении системы (фиг.1).
Внутри контейнера 4, выполненного преимущественно из прозрачного материала, на гиростабилизированной в горизонтальной плоскости платформе 6 (фиг.2) установлено оборудование 7 для сканирования зоны наблюдения, включающее, например, телевизионную камеру, лазерный дальномер (указатель цели) и указатель азимута и другую полезную нагрузку. Стабилизация гиростабилизированной платформы 6 может осуществляться на основе сигналов от трех ортогональных гироскопов с помощью сервоприводов.
Беспилотный летательный аппарат 5 состоит (фиг.3) из движителя в виде двух расположенных соосно воздушных винтов 8 и 9 с автоматом перекоса 10 и 11, и привода 12 воздушных винтов, связанного с ними с возможностью их вращения в разную сторону. Воздушные винты 8, 9 имеют защитную металлическую сетку.
На несущей платформе наземной станции 1 установлены блок питания привода 12 воздушных винтов 8, 9, барабан для многожильного коаксиального соединительного кабеля, а также консоль 13 для размещения панелей управления блоками системы, установленная в кабине 2. Это, в частности, могут быть панели блока управления выдвижением мачты 3, блока управления оборудованием 7 для сканирования зоны наблюдения, а также панели блоков управления беспилотным летательным аппаратом: блока управления электроприводом 12 воздушных винтов 8 и 9 и блоков управления приводами автоматов перекоса 10 и 11, связанных с датчиками управления гиростабилизированной платформы 6. Все блоки и панели соединены соответственно через многожильный коаксиальный кабель.
Выдвижная мачта 3 может быть установлена на несущей платформе наземной станции 1 с помощью первого шарнирного узла 14, выполненного с возможностью поворота по двум осям, а контейнер 4 при этом присоединен к верхнему концу выдвижной мачты 3 с помощью другого такого шарнирного узла 15.
Система воздушного наблюдения работает следующим образом.
При ведении боевых действий или в других случаях, требующих наблюдения за местностью и целеуказания, экипажу может понадобиться информация о рельефе местности или объектах, находящихся вне зоны прямой видимости. С этой целью оператор системы воздушного наблюдения поднимает контейнер 4 с оборудованием 7 для сканирования с помощью беспилотного летательного аппарата 5 и выдвижной мачты 3 из походного положения на наземной станции 1 на требуемую высоту путем манипуляций с панелями управления аппаратурой подъема мачты 3 и управления приводами воздушных винтов 8, 9 беспилотного летательного аппарата 5. Запускается привод 12 беспилотного летательного аппарата 5, который раскручивает воздушные винты 8 и 9. Винты создают вертикальную подъемную силу, которая способствует подъему выдвижной мачты 3. Беспилотный летательный аппарат 5 и аппаратура подъема мачты 3 начинают ее выдвижение, соответственно разматывается многожильный коаксиальный кабель, намотанный на барабан, установленный на несущей платформе наземной станции 1. Автоматы перекоса 10, 11 позволяют регулировать величину и направление подъемной силы, тем самым регулируя скорость выдвижения мачты 3 и удерживая ее на заданной высоте, а контейнер 4 - в горизонтальной плоскости.
Настраивая телевизионное изображение на экране и осуществляя обзор местности, оператор, с помощью соответствующих панелей управления консоли 13, поворачивает стабилизированную платформу 6 (со сканирующим оборудованием 7) по азимуту и определяет дальность до цели по показаниям лазерного дальномера. При необходимости, оператор фиксирует лазерный луч на цели, осуществляя ее лазерную подсветку для ракет с полуактивной системой наведения. Телевизионная система позволяет оператору не только обнаруживать цели на местности, но и наблюдать результаты применения средств поражения.
Применение выдвижной мачты 3 вместе с беспилотным летательным аппаратом 5 позволяет значительно увеличить площадь обзора за счет увеличения высоты подъема контейнера 4 с оборудованием 7 для сканирования зоны наблюдения. Очевидно, что при движении наземной станции 1 по пересеченной местности, при наличии ветровых возмущений или при значительном выдвижении мачты 3 на нее будут действовать силы и моменты, отклоняющие мачту (и соединенный с ней контейнер 4 с оборудованием для сканирования 7) от вертикали. Так как возможности гиростабилизируемой платформы 6 по поддержанию ее горизонтального положения ограничены, основную роль в этом случае играет беспилотный летательный аппарат 5. Сигналы, пропорциональные отклонению от вертикали, с гироскопов стабилизированной платформы 6 через многожильный коаксиальный кабель поступают в блок управления полетом беспилотного летательного аппарата 5, который формирует сигнал управления автоматами перекоса 10 и 11. Автоматы перекоса 10 и 11 меняют циклический шаг воздушных винтов 8 и 9, и они создают горизонтальную составляющую подъемной силы, направленную противоположно возмущающим силам. Уборка выдвижной мачты 3 в походное положение осуществляется в обратном порядке. Управление беспилотным летательным аппаратом 5 осуществляется в автоматическом режиме, а оператор управляет только высотой подъема выдвижной мачты 3.
Применение беспилотного летательного аппарата в составе системы воздушного наблюдения и целеуказания позволяет обеспечить ее функционирование в движении по пересеченной местности и неспокойной водной поверхности, увеличить высоту подъема выдвижной мачты 3 и ее полезную нагрузку, что тем самым повышает эффективность наблюдения и целеуказания. Управление всей системой воздушного наблюдения и целеуказания, включая управление беспилотным летательным аппаратом 5, может осуществлять один оператор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |
| Мобильный быстроустанавливаемый автономный пост технического наблюдения для контроля обстановки на охраняемой территории на базе аэромодуля на привязи | 2021 |
|
RU2759977C1 |
| Система боевых беспилотных летательных аппаратов | 2022 |
|
RU2808733C1 |
| КОМБИНИРОВАННЫЙ СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2824851C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ПРИВЯЗНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2441809C2 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| Автономный беспилотный летательный аппарат для доставки малокалиберных боеприпасов до цели | 2023 |
|
RU2826931C1 |
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| Устройство радиомониторинга морских и воздушных объектов с применением привязного беспилотного летательного аппарата мультикоптерной схемы с электропитанием по тросу-кабелю | 2023 |
|
RU2813105C1 |
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
Изобретение относится к системам наблюдения за местностью. Система воздушного наблюдения включает наземную станцию, установленную на ее несущей платформе выдвижную полую мачту, на верхнем конце которой расположен контейнер с прозрачным защитным корпусом. Внутри корпуса находится оборудование для сканирования зоны наблюдения. Оборудование может включать телевизионную камеру, лазерный дальномер - целеуказатель и другие приборы. Все устройства размещены на гиростабилизированной по трем осям платформе и связаны многожильным коаксиальным кабелем, проходящим внутри мачты и намотанным на барабан, с консолью, в которой размещены панели управления входящими в систему устройствами. К контейнеру сверху подсоединен беспилотный летательный аппарат (БПЛА), состоящий из движителя, в виде двух соосно расположенных воздушных винтов с электроприводом, и автоматов перекоса для каждого из винтов со своим приводом. Управление БПЛА осуществляется с помощью дополнительной панели управления в консоли. Датчики гиростабилизированной платформы связаны с панелью управления БПЛА для формирования управляющих сигналов на приводы автоматов перекоса воздушных винтов. Выдвижная мачта соединена с несущей платформой и контейнером с помощью шарниров, и выполнена телескопической с пневмоприводом или гидроприводом. Применение БПЛА в системе наблюдения повышает эффективность наблюдения и обеспечивает функционирование системы в движении по пересеченной местности или возмущенной водной поверхности. 3 з.п. ф-лы, 3 ил.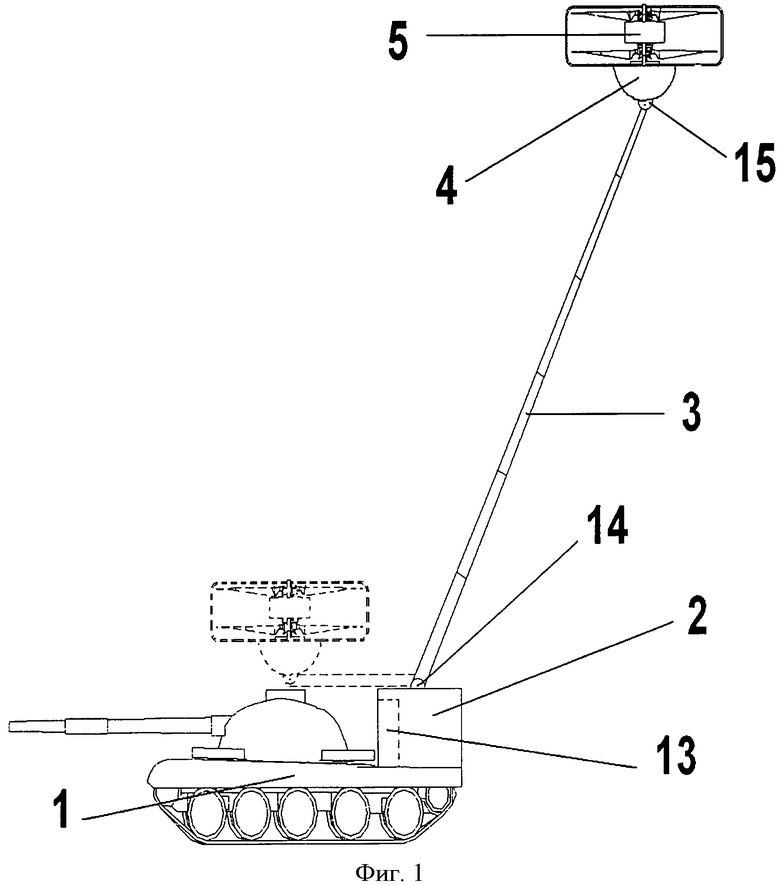
1. Система воздушного наблюдения, содержащая наземную станцию, установленную на ее несущей платформе выдвижную мачту с оборудованием для сканирования зоны наблюдения, расположенным в контейнере, установленном на верхнем конце выдвижной мачты, и консоль с панелью управления выдвижением мачты и сканированием зоны наблюдения, отличающаяся тем, что к контейнеру сверху присоединен беспилотный летательный аппарат с двумя соосно установленными воздушными винтами и их приводом, а также автоматом перекоса каждого из воздушных винтов со своим приводом, соединенными многожильным коаксиальным кабелем с консолью с дополнительной панелью управления беспилотным летательным аппаратом.
2. Система по п.1, отличающаяся тем, что оборудование для сканирования зоны наблюдения установлено в контейнере на гиростабилизированной платформе, при этом датчики управления гиростабилизированной платформы связаны с панелью управления беспилотного летательного аппарата для формирования управляющих сигналов на приводы автоматов перекоса каждого из воздушных винтов.
3. Система по п.1, отличающаяся тем, что выдвижная мачта установлена на несущей платформе наземной станции с помощью одного шарнирного узла с возможностью поворота по двум осям, а контейнер присоединен к верхнему концу выдвижной мачты с помощью другого такого шарнирного узла.
4. Система по п.1, отличающаяся тем, что выдвижная мачта выполнена телескопической с пневматическим или гидравлическим приводом.
| WO 2007141795 A1 (BARNEA ELIEZER), 13.12.2007, c.13 строка 28 - с.14 строка 5, с.14 строка 29 - с.15 строка 10, фиг.1, 36 с | |||
| US 3715953 A (US ARMY), 13.02.1973, c.3-4, фиг.1, 2, 6 | |||
| Способ изготовления электродов для электрических печей | 1936 |
|
SU51966A1 |
| Способ получения эмульсионных масляных красок | 1940 |
|
SU59852A1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |

